Experimental Investigation of Linear Encoder’s Subdivisional Errors under Different Scanning Speeds


Abstract
Featured Application
Abstract

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Metrological Process and Subdivisional Errors in Optical Encoders
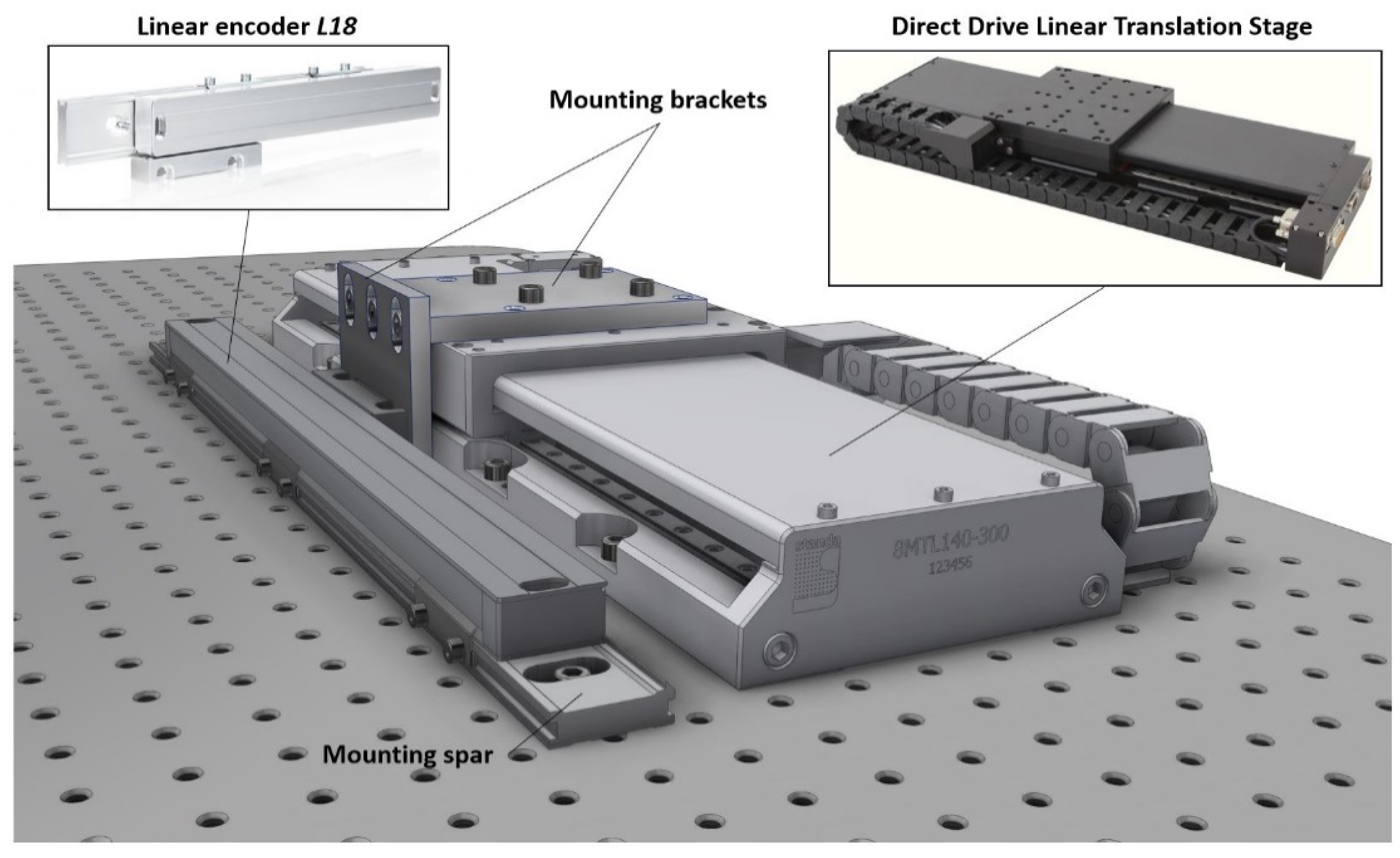
3. Investigation Methodology and Experiment Setup
- Motion controller: servo motion controller with a built-in driver ACS Motion Control SPiiPlusCMnt.
- Linear-translation stage: motorized direct drive linear translation stage “STANDA” 8MTL1401-300.
- Tested linear encoder: optical (4-field scanning) linear encoder Precizika Metrology L18 (measuring length = 300 mm, grating period = 20 µm).
- Data acquisition and processing equipment. digital oscilloscope PicoScope 3000 and notebook with appropriate software.
4. Results and Discussion
- The initial overview of the Lissajous curves showed that the SDE of the tested encoder depended on the scanning speed. More detailed analysis at different velocities is necessary to figure out the dependency.
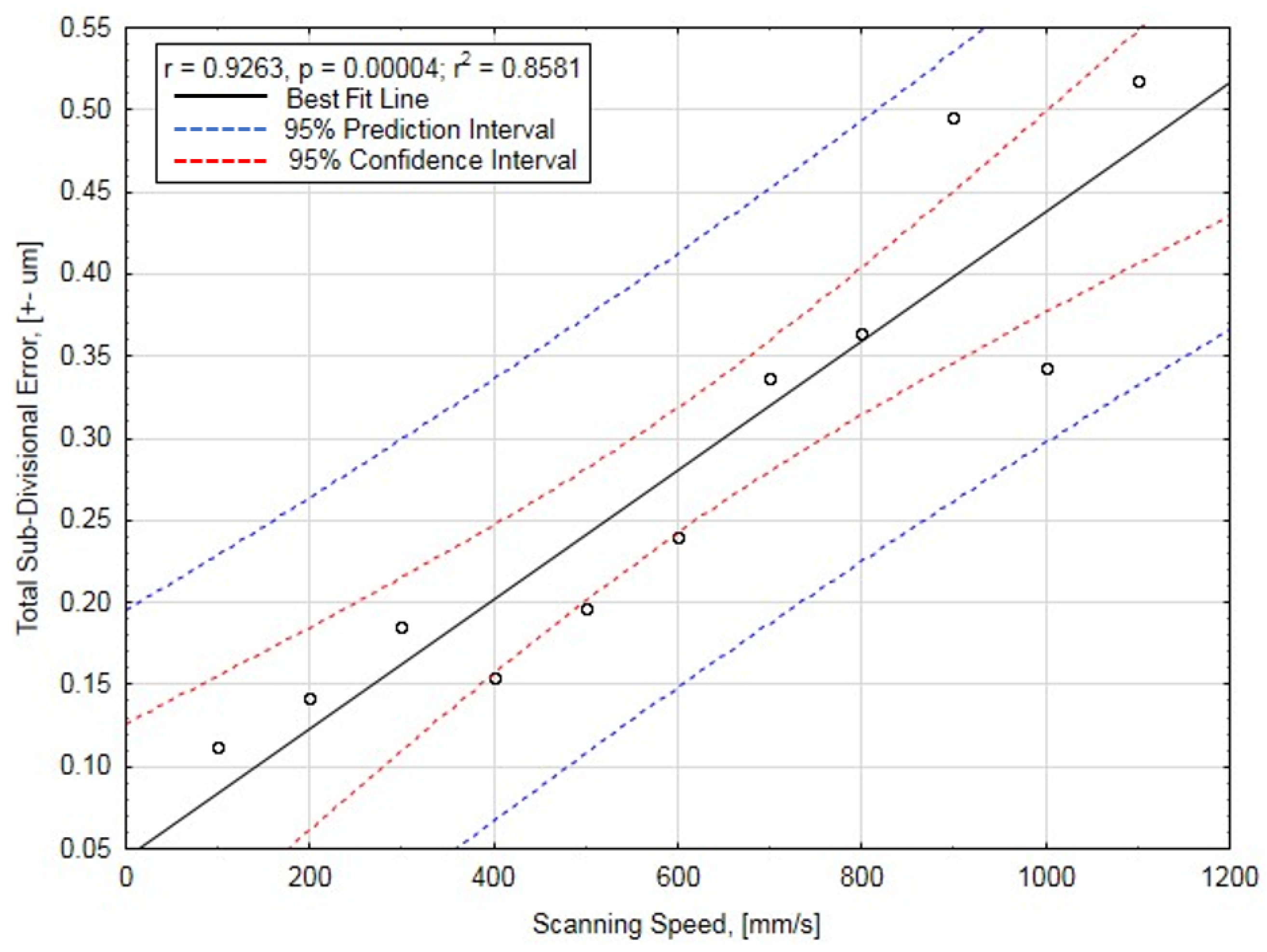
- Statistical investigation showed a strong linear relationship between SDE and scanning speed. In this case, it is important to know the maximal traversing velocity at which the encoder runs in a specific application. Different maximal speed gives a different maximal SDE value and sets a distinct limitation for the highest resolution. In another case, when the SDE retains the same meaning in the whole speed range, or its relationship is nonlinear, the maximal SDE value should be determined.
- The maximal recommended traversing velocity of the encoder was 1 m/s. Working in this range, maximal SDE was ±0.49 µm, reached at 900 mm/s. After interpolation of these encoder signals, the resolution should be more than 0.5 µm. Otherwise, the interpolation error is bigger than the measuring step.
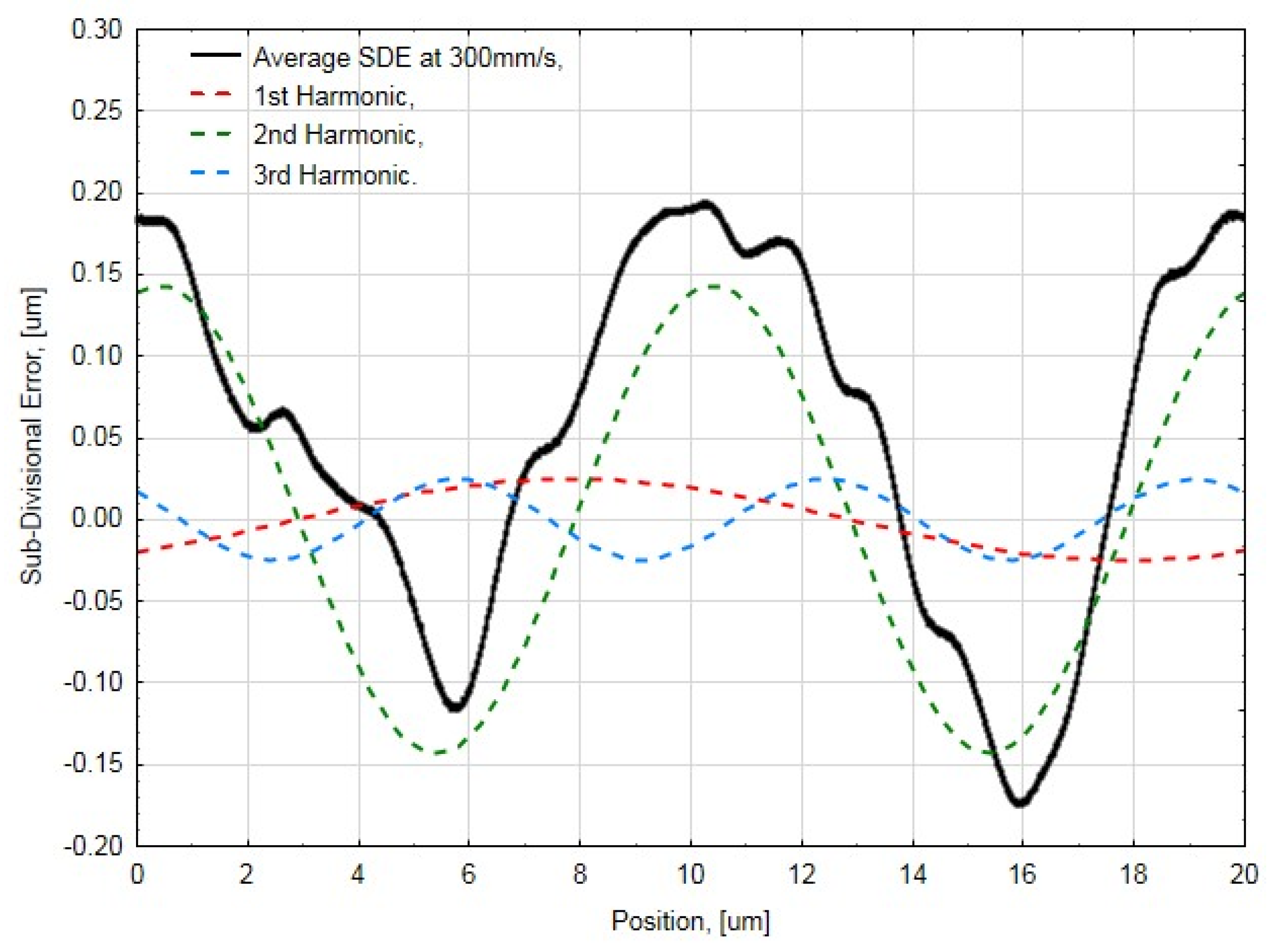
- At each speed, the biggest part of the SDE budget formed the second harmonic. This directly correlates to increasing velocity. This means that the difference of the signal amplitudes or the phase shift increased with speed. Amplitude, offset, or phase errors could be caused by the physics of the optical-scanning principle, and the dynamical behavior and improper adjustment of the electric components (like photodiodes, used processing chips, or analog amplifiers), or the quality of the used cable and other effects. It is necessary to pay attention to these aspects not only during the design process, but also while choosing a suitable encoder for a specific application. For example, the tested encoder’s working principle was based on the four-field scanning method. If the application requires more stability to scanning speed, or if there is an increased possibility of measuring scale contamination, the optical encoder based on the single-field scanning principle must be selected.
- The calculated total SDE values at 900 and 1000 mm/s velocities were distinct from the determined linear relationship. The magnitudes of the first and third harmonics reached their maximum values at 900 mm/s. When analyzing the first harmonic graph, in speeds above 500 mm/s the offset error of the encoder signals started to greatly vary. It is very likely that the dynamic behavior of the encoder was affected in this range of speed. The reading head is a complex mechanical part containing optical and electronic components, and flexible spring-based suspension, so even the smallest translation, distance variation, tilt, or other change in a relative position between scanning reticle and measuring scale could be generated by resonant frequency, friction, or other forces. For more detailed analysis, the generated frequencies at these speeds should be determined and compared with the natural frequencies of the encoder.
- FFT analysis showed that the major part of the SDE was made up of only a few first harmonics. That means that the trend of the SDE could be quite accurately approximated by using a simple equation that contains information of only the three first harmonics (n = 3).
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| SDE | Subdivisional error |
| FFT | Fast Fourier transformation |
References
- Zhao, L.; Cheng, K.; Chen, S.; Ding, H.; Zhao, L. An approach to investigate moiré patterns of a reflective linear encoder with application to accuracy improvement of a machine tool. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2018, 233, 927–936. [Google Scholar] [CrossRef]
- Bai, Q.; Liang, Y.; Cheng, K.; Long, F. Design and analysis of a novel large-aperture grating device and its experimental validation. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2013, 227, 1349–1359. [Google Scholar] [CrossRef]
- Liu, C.; Jywe, W.; Hsu, T. The application of the double-readheads planar encoder system for error calibration of computer numerical control machine tools. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2004, 218, 1077–1089. [Google Scholar] [CrossRef]
- Du, Z.; Zhang, S.; Hong, M. Development of a multi-step measuring method for motion accuracy of NC machine tools based on cross grid encoder. Int. J. Mach. Tools Manuf. 2010, 50, 270–280. [Google Scholar] [CrossRef]
- Ishii, N.; Taniguchi, K.; Yamazaki, K.; Aoyama, H. Performance improvement of machine tool by high accuracy calibration of built-in rotary encoders. In Proceedings of the 9th International Conference on Leading Edge Manufacturing in 21st Century, Japan Society of Mechanical Engineers, Hiroshima, Japan, 13–17 November 2017. [Google Scholar]
- Algburi, R.N.A.; Gao, H. Health assessment and fault detection system for an industrial robot using the rotary encoder signal. Energies 2019, 12, 2816. [Google Scholar] [CrossRef]
- Han, Z.; Jianjun, Y.; Gao, L. External force estimation method for robotic manipulator based on double encoders of joints. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018. [Google Scholar]
- Peng, L.; Xiangpeng, L. Common sensors in industrial robots: A review. J. Phys. Conf. Ser. 2019, 1267, 012036. [Google Scholar]
- Mikhel, S.; Popov, D.; Mamedov, S.; Klimchik, A. Advancement of robots with double encoders for industrial and collaborative applications. In Proceedings of the 23th Conference of Open Innovations Association (FRUCT), Bologna, Italy, 13–16 November 2018, ISSN 2305-7254. [Google Scholar]
- Rodriguez-Donate, C.; Osornio-Rios, R.A.; Rivera-Guillen, J.R.; Romero-Troncoso, R.J. Fused smart sensor network for multi-axis forward kinematics estimation in industrial robots. Sensors 2011, 11, 4335–4357. [Google Scholar] [CrossRef]
- Vazquez-Gutierrez, Y.; O’Sullivan, L.; Kavanagh, R.C. Study of the impact of the incremental optical encoder sensor on the dynamic performance of velocity servosystems. J. Eng. 2019, 2019, 3807–3811. [Google Scholar] [CrossRef]
- Vazquez-Gutierrez, Y.; O’Sullivan, L.; Kavanagh, R.C. Small-signal modeling of the incremental optical encoder for motor control. IEEE Trans. Ind. Electron. 2019. [Google Scholar] [CrossRef]
- Vazquez-Gutierrez, Y.; O’Sullivan, L.; Kavanagh, R.C. Evaluation of three optical-encoder-based speed estimation methods for motion control. J. Eng. 2019, 2019, 4069–4073. [Google Scholar] [CrossRef]
- Zhang, Z.; Olgac, N. Zero magnitude tracking control for servo system with extremely low-resolution digital encoder. Int. J. Mechatron. Manuf. Syst. 2018, 10. [Google Scholar] [CrossRef]
- Zhao, M.; Jia, X.; Lin, J.; Lei, Y.; Lee, J. Instantaneous speed jitter detection via encoder signal and its application for the of planetary gearbox. Mech. Syst. Signal Process. 2018, 98, 16–31. [Google Scholar] [CrossRef]
- Li, B.; Zhang, X.; Wu, J. New procedure for gear fault detection and diagnosis instantaneous angular speed. Mech. Syst. Signal Process. 2017, 85, 415–428. [Google Scholar] [CrossRef]
- Ariznavarreta-Fernandez, F.; Gonzalez-Palacio, C.; Menendez-Diaz, A.; Ordonez, C. Measurement system with angular encoders for continuous monitoring of tunnel convergence. Tunn. Undergr. Space Technol. 2016, 56, 176–185. [Google Scholar] [CrossRef]
- Zhao, M.; Lin, J. Health assessment of rotating machinery using a rotary encoder. IEEE Trans. Ind. Electron. 2018, 65, 2548–2556. [Google Scholar] [CrossRef]
- Tang, T.; Chen, S.; Huang, X.; Yang, T.; Qi, B. Combining load and motor encoders to compensate nonlinear disturbances for high precision tracking control of gear-driven Gimbal. Sensors 2018, 18, 754. [Google Scholar] [CrossRef] [PubMed]
- Chong, K.K.; Wong, C.-W.; Siaw, F.-L.; Yew, T.-K.; Ng, S.-S.; Liang, M.-S.; Lim, Y.-S.; Lau, S.-L. Integration of an on-axis general sun-tracking formula in the algorithm of an open-loop sun-tracking system. Sensors 2009, 9, 7849–7865. [Google Scholar] [CrossRef] [PubMed]
- Kimura, A.; Gao, W.; Kim, W.; Hosono, K.; Shimizu, Y.; Shi, L.; Zeng, L. A sub-nanometric three-axis surface encoder with short-period planar gratings for stage motion measurement. Precis. Eng. 2012, 36, 576–585. [Google Scholar] [CrossRef]
- Lee, C.B.; Kim, G.H.; Lee, S.K. Design and construction of a single unit multi-function optical encoder for a six-degree-of-freedom motion error measurement in an ultraprecision linear stage. Meas. Sci. Technol. 2011, 22. [Google Scholar] [CrossRef]
- Li, Y.T.; Fan, K.C. A novel method of angular positioning error analysis of rotary stages based on the Abbe principle. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2018, 232, 1885–1892. [Google Scholar] [CrossRef]
- Lou, Z.F.; Hao, X.P.; Cai, Y.D.; Lu, T.F.; Wang, X.D.; Fan, K.C. An embedded sensors system for real-time detecting 5-DOF error motions of rotary stages. Sensors 2019, 19, 2855. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Kim, S.W.; Bosse, H.; Haitjema, H.; Chen, Y.L.; Lu, X.D.; Knapp, W.; Weckenmann, A.; Estler, W.T.; Kunzmann, H. Measurement technologies for precision positioning. CIRP Ann. Manuf. Technol. 2015, 64, 773–796. [Google Scholar] [CrossRef]
- Smith, G.T. Machine Tool Metrology. An Industrial Handbook; Springer: Berlin, Germany, 2016; pp. 159–177. [Google Scholar]
- Heidenhain. Linear Encoders for Numerically Controlled Machine Tools. Available online: https://www.heidenhain.com/fileadmin/pdb/media/img/571470-2C_Linear_Encoders_For_Numerically_Controlled_Machine_Tools.pdf (accessed on 22 January 2020).
- Fagor Automation. Feedback Systems. Available online: https://www.fagorautomation.com/en/p/feedback-systems/ (accessed on 22 January 2020).
- Ye, G.; Wu, Z.; Xu, Z.; Wang, Y.; Shi, Y.; Liu, H. Development of a digital interpolation module for high-resolution sinusoidal encoders. Sens. Actuators A Phys. 2019, 285, 501–510. [Google Scholar] [CrossRef]
- Ye, G.; Liu, H.; Wang, Y.; Lei, B.; Shi, Y.; Yin, L.; Lu, B. Ratiometric-linearization -based high-precision electronic interpolator for sinusoidal optical encoders. IEEE Trans. Ind. Electron. 2018, 65, 8224–8231. [Google Scholar] [CrossRef]
- Ye, G.; Xing, H.; Liu, H.; Li, Y.; Lei, B.; Niu, D.; Li, X.; Lu, B.; Liu, H. Total error compensation of non-ideal signal parameters for Moire encoders. Sens. Actuators 2019, 298. [Google Scholar] [CrossRef]
- Alejandre, I.; Artes, M. Machine tool errors caused by optical linear encoders. J. Eng. Manuf. 2004, 218, 113–122. [Google Scholar] [CrossRef]
- Lopez, J.; Artes, M.; Alejandre, I. Analysis of optical linear encoders errors under vibration at different mounting conditions. Measurement 2011, 44, 1367–1380. [Google Scholar] [CrossRef]
- Lopez, J.; Artes, M.; Alejandre, I. Analysis under vibrations of optical linear encoders based on different scanning methods using an improved experimental approach. Exp. Tech. 2012, 36, 35–47. [Google Scholar] [CrossRef]
- Lopez, J.; Artes, M. A new methodology for vibration error compensation of optical encoders. Sensors 2012, 12, 4918–4933. [Google Scholar] [CrossRef]
- Alejandre, I.; Artes, M. Real thermal coefficient in optical linear encoders. Exp. Tech. 2004, 28, 18–22. [Google Scholar] [CrossRef]
- Alejandre, I.; Artes, M. Thermal non-linear behaviour in optical linear encoders. Int. J. Mach. Tools Manuf. 2005, 46, 1319–1325. [Google Scholar] [CrossRef]
- Rozman, J.; Pletersek, A. Linear optical encoder system with sinusoidal signal distortion below −60 dB. IEEE Trans. Instrum. Meas. 2010, 59, 1544–1549. [Google Scholar] [CrossRef]
- Li, M.; Liang, Z.; Zhang, R.; Wu, Q.; Xin, C.; Jin, L.; Xie, K.; Zhao, H. Large-scale range diffraction grating displacement sensor based on polarization phase-shifting. Appl. Opt. 2020, 59, 469–473. [Google Scholar] [CrossRef]
- Ye, G.; Liu, H.; Jiang, W.; Li, X.; Jiang, W.; Yu, H.; Shi, Y.; Yin, L.; Lu, B. Design and development of an optical encoder with sub-micron accuracy using a multiple-tracks analyser grating. Rev. Sci. Instrum. 2017, 88. [Google Scholar] [CrossRef]
- Albrecht, C.; Klock, J.; Martens, O.; Schumacher, W. Online estimation and correction of systematic encoder line errors. Machines 2017, 5, 1. [Google Scholar] [CrossRef]
- Mendenhall, M.H.; Windover, D.; Henins, A.; Cline, J.P. An algorithm for the compensation of short-period errors in optical encoders. Metrologia 2015, 52, 685. [Google Scholar] [CrossRef]
- Ye, G.; Fan, S.; Liu, H.; Li, X.; Yu, H.; Shi, Y.; Yin, L.; Lu, B. Design of a precise and robust linearized converter for optical encoders using a ratiometric technique. Meas. Sci. Technol. 2014, 25. [Google Scholar] [CrossRef]
- Yandayan, T.; Geckeler, R.D.; Just, A.; Krause, M.; Akgoz, S.A.; Aksulu, M.; Grubert, B.; Watanabe, T. Investigation of interpolation errors of angle encoders for high precision angle metrology. Meas. Sci. Technol. 2018, 29. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Yan, X.; Chen, X.; Lv, H. Compensation of Moire fringe sinusoidal deviation in photoelectric encoder based on tunable filter. In Proceedings of the 2011 Symposium on Photonics and Optoelectronics (SOPO), Wuhan, China, 16–18 May 2011. [Google Scholar] [CrossRef]
- Kao, C.F.; Huang, H.L.; Lu, H. Optical encoder based on Fractional-Talbot effect using two-dimensional phase grating. Opt. Commun. 2010, 283, 1950–1955. [Google Scholar] [CrossRef]
- Kao, C.F.; Lu, H. Optical encoder based on the fractional Talbot effect. Opt. Commun. 2005, 250, 16–23. [Google Scholar] [CrossRef]
- Crespo, D.; Alonso, J.; Tomas, M.; Eusebio, B. Optical encoder based on the Lau effect. Opt. Eng. 2000, 39, 817–822. [Google Scholar] [CrossRef]
- Sudol, R.; Thompson, B.J. Lau effect: Theory and experiment. Appl. Opt. 1981, 20, 1107–1116. [Google Scholar] [CrossRef] [PubMed]
- Li, X. Displacement measurement based on the Moire fringes. Int. Soc. Opt. Eng. 2011. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, T.T.; Yuan, B.; Wang, L.-Q. A digital Moire fringe method for displacement sensors. Front. Inform. Technol. Electron. Eng. 2016, 17, 946–953. [Google Scholar] [CrossRef]
- Zhao, B.; Miao, J.; Xie, H.; Asundi, A. Modeling of grating/Moire based micro sensor. Microsyst. Technol. 2001, 7, 107–116. [Google Scholar] [CrossRef]
- Ye, G.; Liu, H.; Xie, H.; Asundi, A. Optimizing design of an optical encoder based on generalized grating imaging. Meas. Sci. Technol. 2016, 27. [Google Scholar] [CrossRef]
- Ye, G.; Liu, H.; Fan, S.; Li, X.; Yu, H.; Lei, B.; Shi, Y.; Yin, L.; Lu, B. A theoretical investigation of generalized grating imaging and its application to optical encoders. Opt. Commun. 2015, 354, 21–27. [Google Scholar] [CrossRef]
- Liu, H.; Ye, G.; Shi, Y.; Yin, L.; Chen, B.; Lu, B. Multiple harmonics suppression for optical encoders based on generalized grating imaging. J. Mod. Opt. 2016, 63, 1564–1572. [Google Scholar] [CrossRef]
- Iwata, K. Interpretation of generalized grating imaging. J. Opt. Soc. Am. 2008, 25, 2244–2250. [Google Scholar] [CrossRef]
- Lee, C.-K.; Wu, C.-C.; Chen, S.-J.; Yu, L.-B.; Chang, Y.-C.; Wang, Y.-F.; Chen, J.-Y.; Wu, J.W.-J. Design and construction of linear laser encoders that possess high tolerance of mechanical run out. Appl. Opt. 2004, 43, 5754–5762. [Google Scholar] [CrossRef]
- Liu, C.-H.; Jywe, W.-Y.; Wang, M.-S.; Huang, H.-L. Development of a three-degrees-of-freedom laser linear encoder for error measurement of a high precision range. Rev. Sci. Instrum. 2007, 78. [Google Scholar] [CrossRef]
- Liu, C.H.; Cheng, C.H. Development of a multi-degree-of-freedom laser encoder using +- 1 order and +- 2 order diffraction rays. In Proceedings of the 10th International Symposium of Measurement Technology and Intelligent Instruments, Daejeon, Korea, 29 June–2 July 2011. [Google Scholar]
- Heidenhain. Interfaces. Available online: https://www.heidenhain.com/en_US/documentation/fundamentals/interfaces/ (accessed on 22 February 2020).









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gurauskis, D.; Kilikevičius, A.; Borodinas, S. Experimental Investigation of Linear Encoder’s Subdivisional Errors under Different Scanning Speeds. Appl. Sci. 2020, 10, 1766. https://doi.org/10.3390/app10051766
Gurauskis D, Kilikevičius A, Borodinas S. Experimental Investigation of Linear Encoder’s Subdivisional Errors under Different Scanning Speeds. Applied Sciences. 2020; 10(5):1766. https://doi.org/10.3390/app10051766
Chicago/Turabian StyleGurauskis, Donatas, Artūras Kilikevičius, and Sergejus Borodinas. 2020. "Experimental Investigation of Linear Encoder’s Subdivisional Errors under Different Scanning Speeds" Applied Sciences 10, no. 5: 1766. https://doi.org/10.3390/app10051766
APA StyleGurauskis, D., Kilikevičius, A., & Borodinas, S. (2020). Experimental Investigation of Linear Encoder’s Subdivisional Errors under Different Scanning Speeds. Applied Sciences, 10(5), 1766. https://doi.org/10.3390/app10051766