RUL Prediction of Railway PCCS Based on Wiener Process Model with Unequal Interval Wear Data


Abstract
1. Introduction
2. The Wear Data Analysis for PCCS and Problem Statement
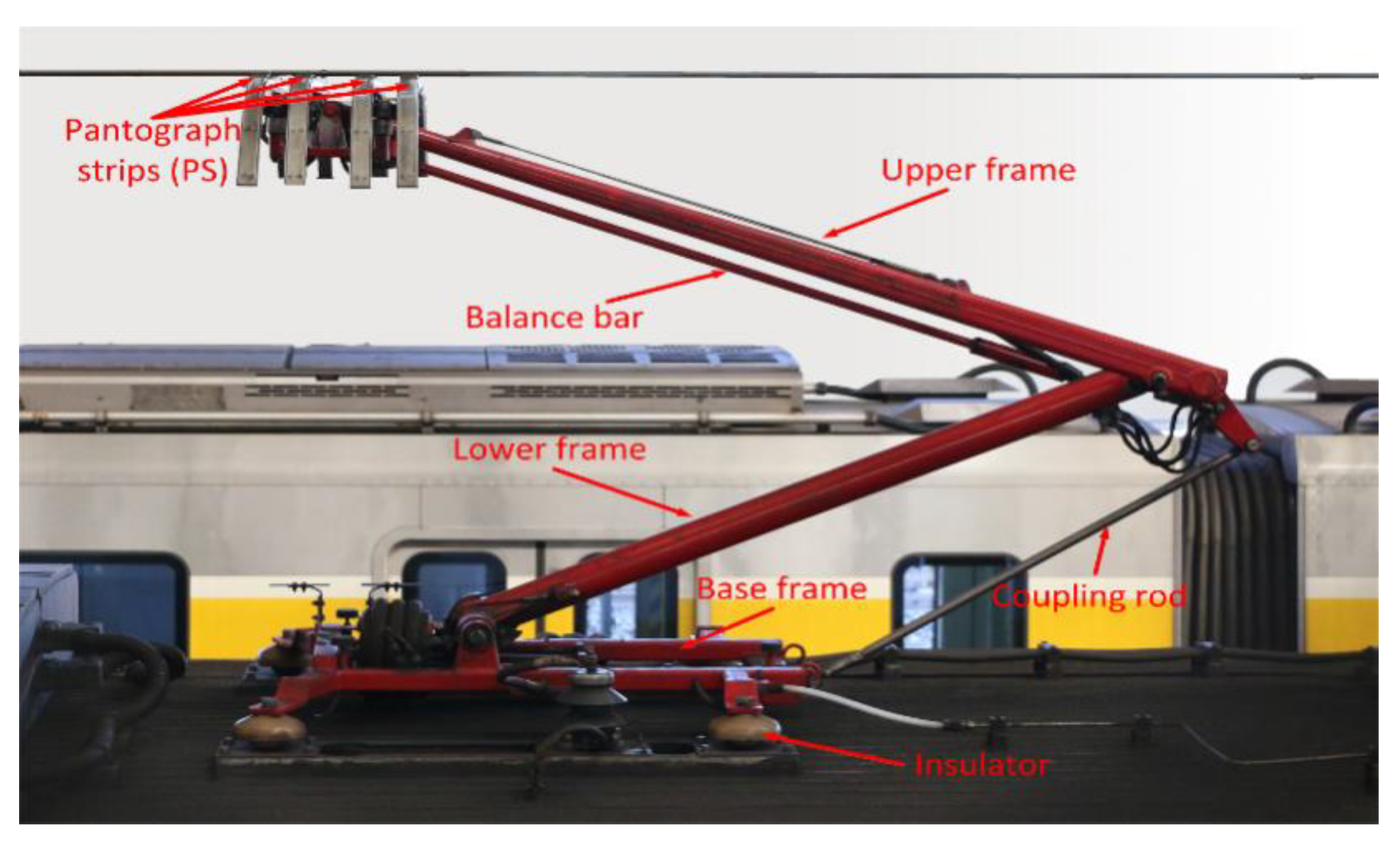
2.1. The Pantograph Carbon Contact Strip
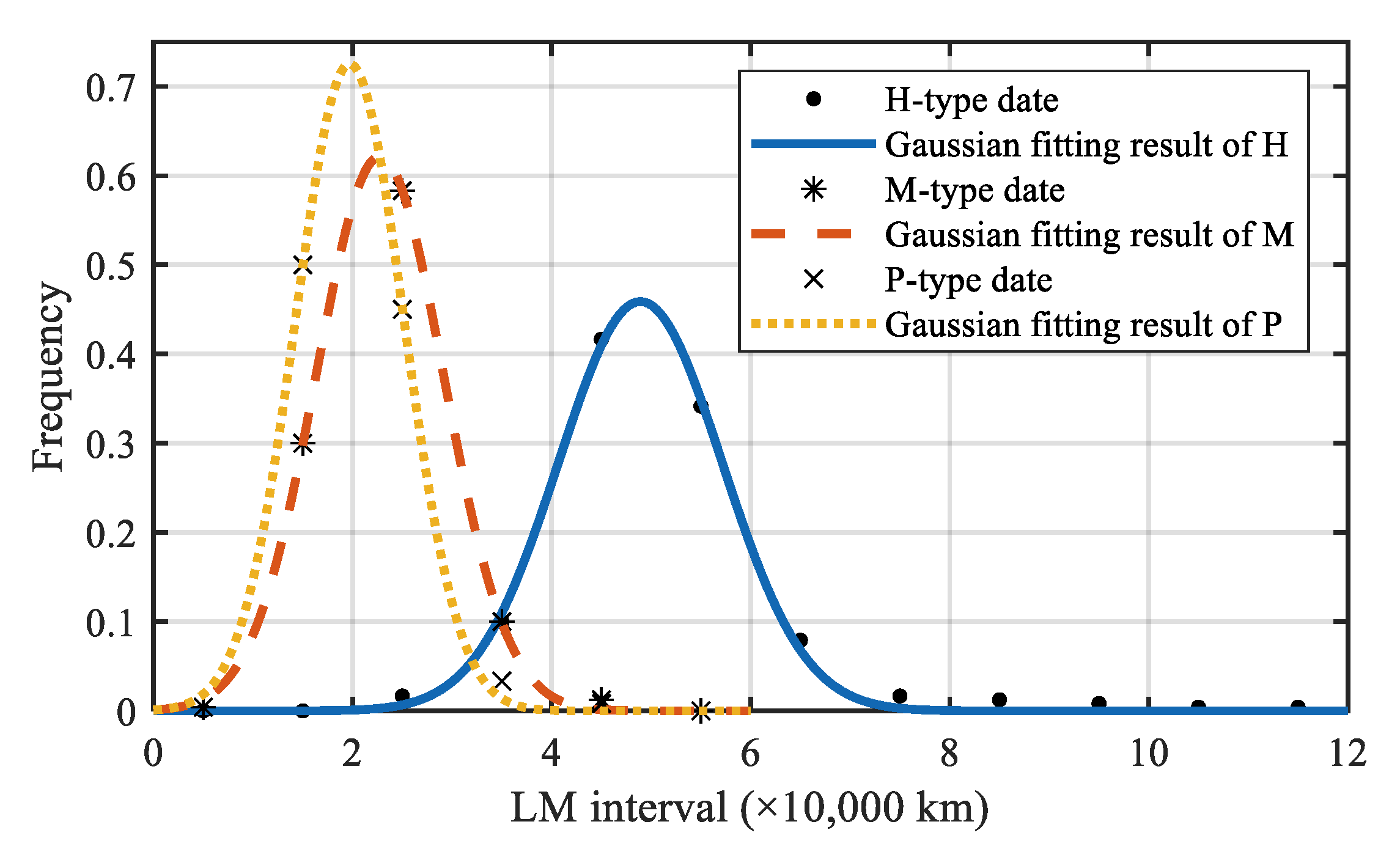
2.2. The Life Mileage Analysis of PCCS
2.3. The Wear Development Trends Analysis of PCCS
2.4. Problem Statement
3. A Wiener Process-Based Approach of RUL Prediction with Unequal Interval Data
3.1. Preprocessing of Unequal Interval PCCS Wear Series
3.2. Linear Random Wear Modeling and RUL Prediction
3.3. Model Parameters Estimation
- (1)
- E-stepwhere is the result in the ith iteration based on X0:k.
- (2)
- M-step
3.4. Restoration of Model Parameter and Wear Loss
4. Cases Study
4.1. Data Description
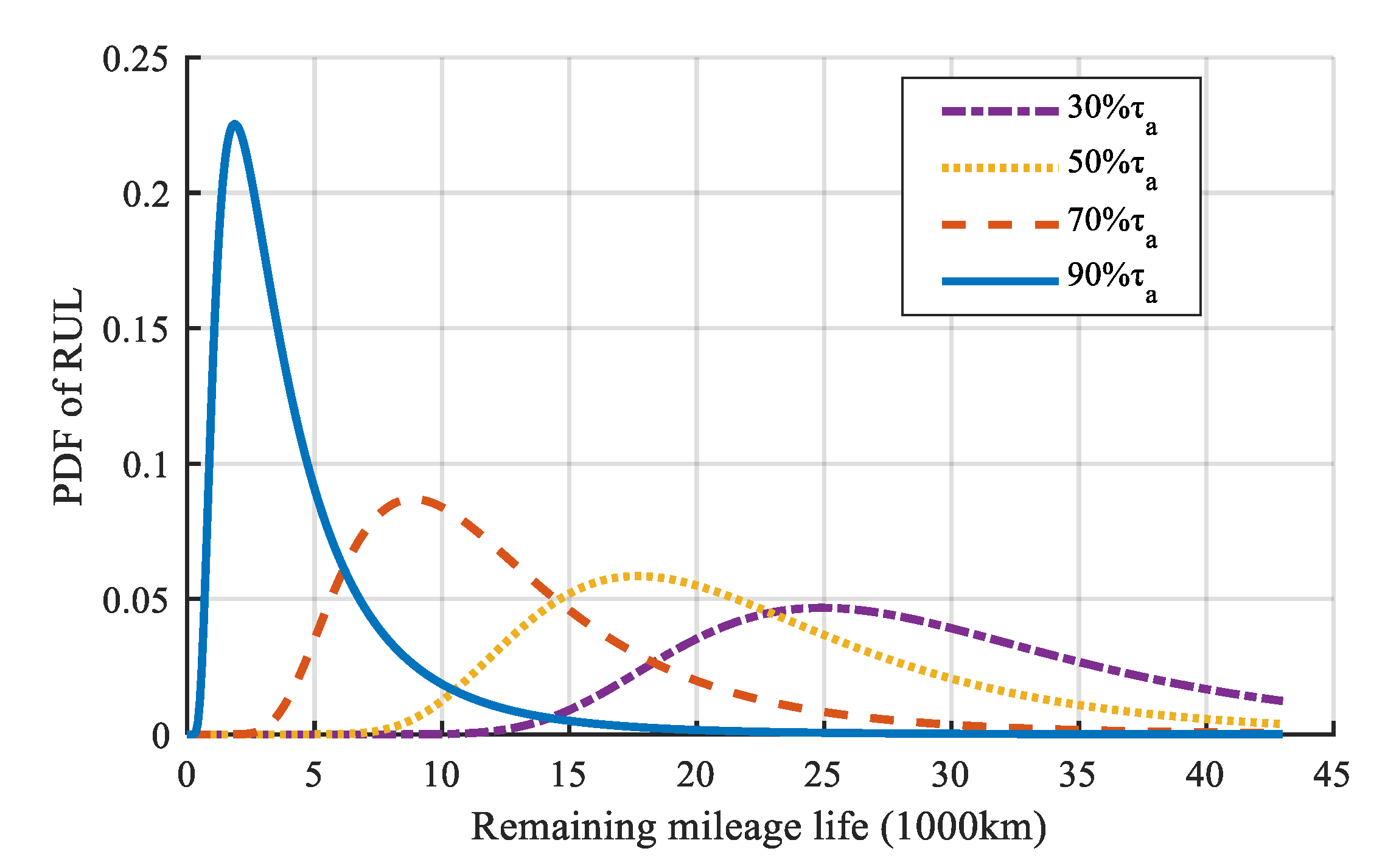
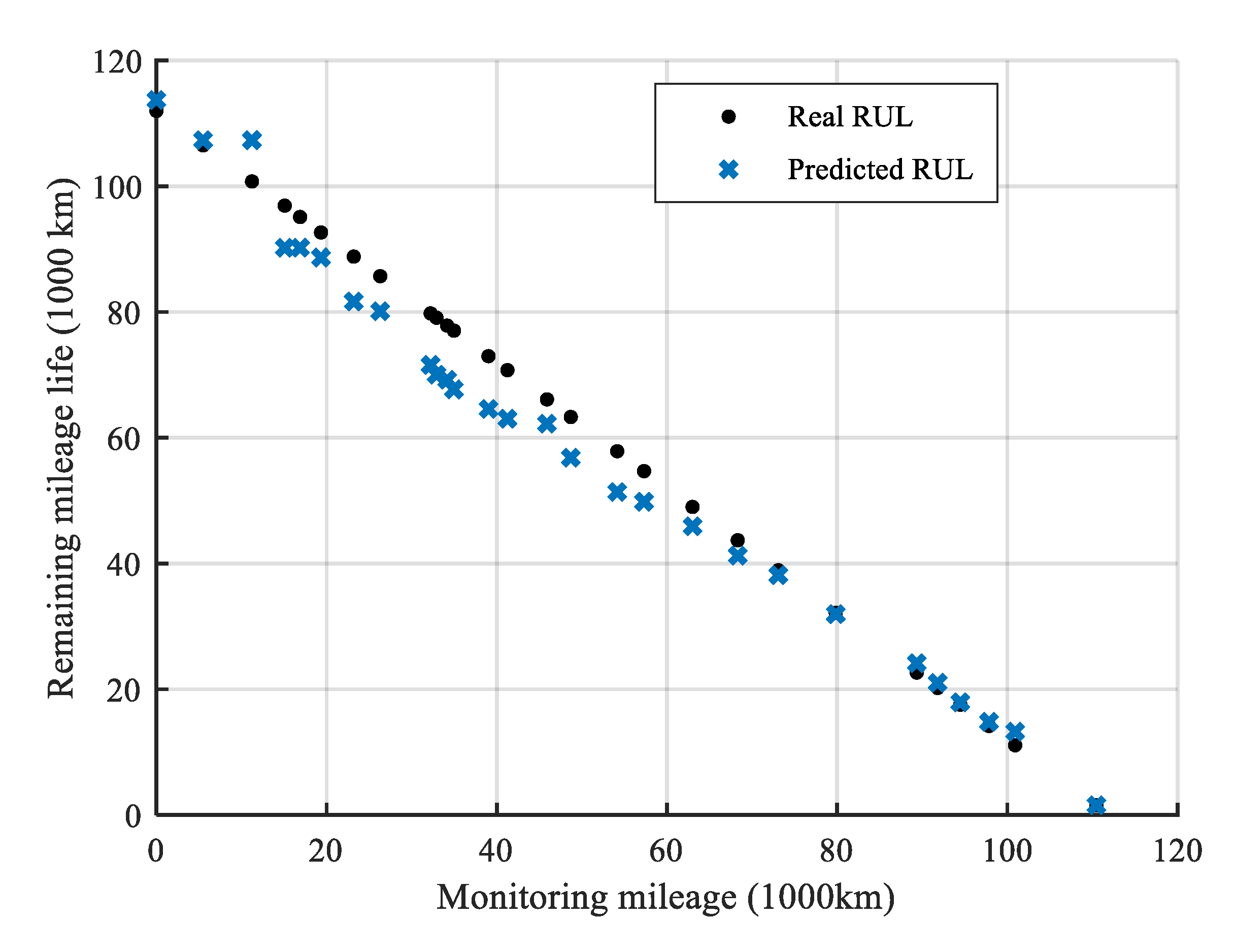
4.2. RUL Prediction of PCCS
4.2.1. The RUL Prediction of Sample 1
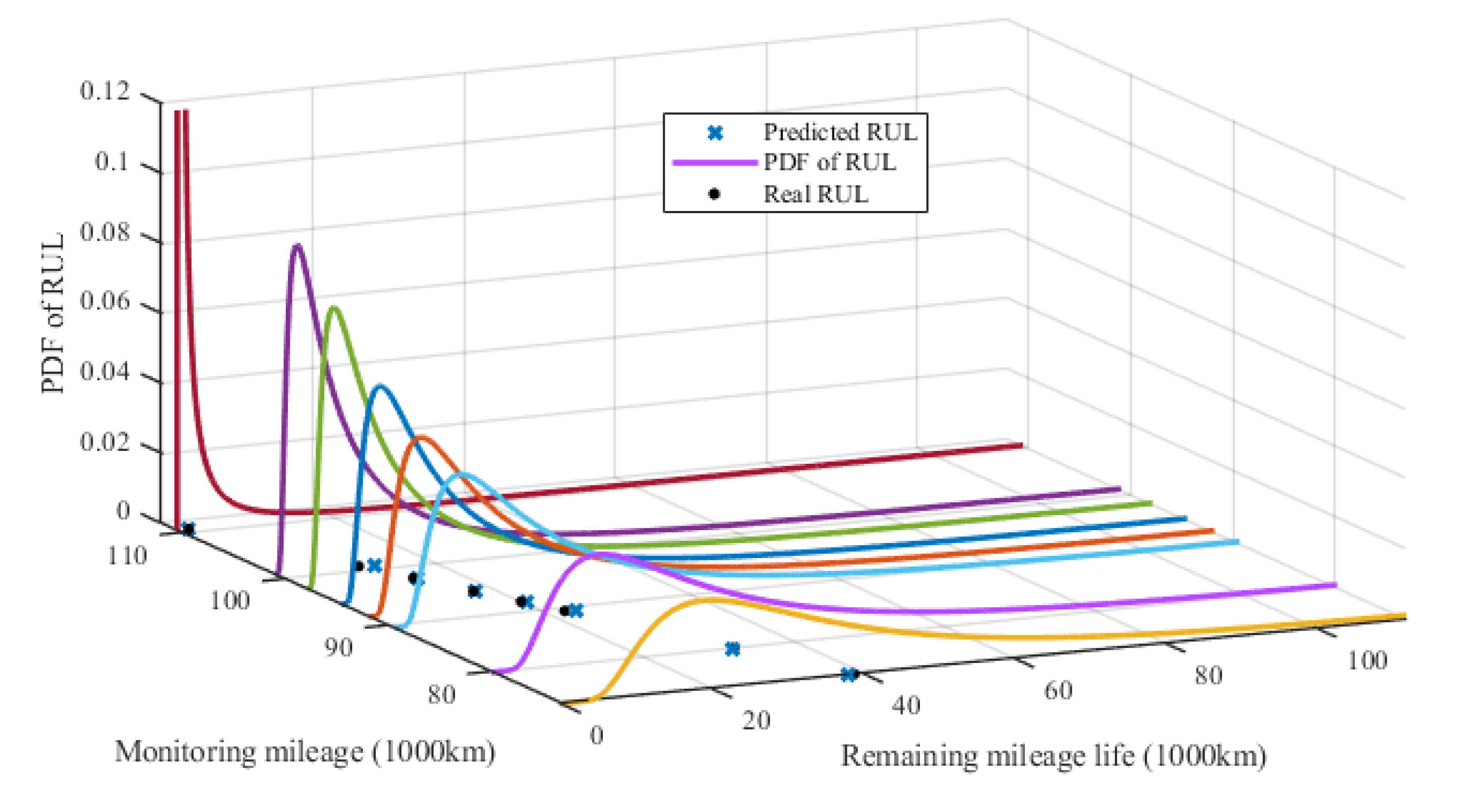
4.2.2. The RUL Prediction Result of Sample 2
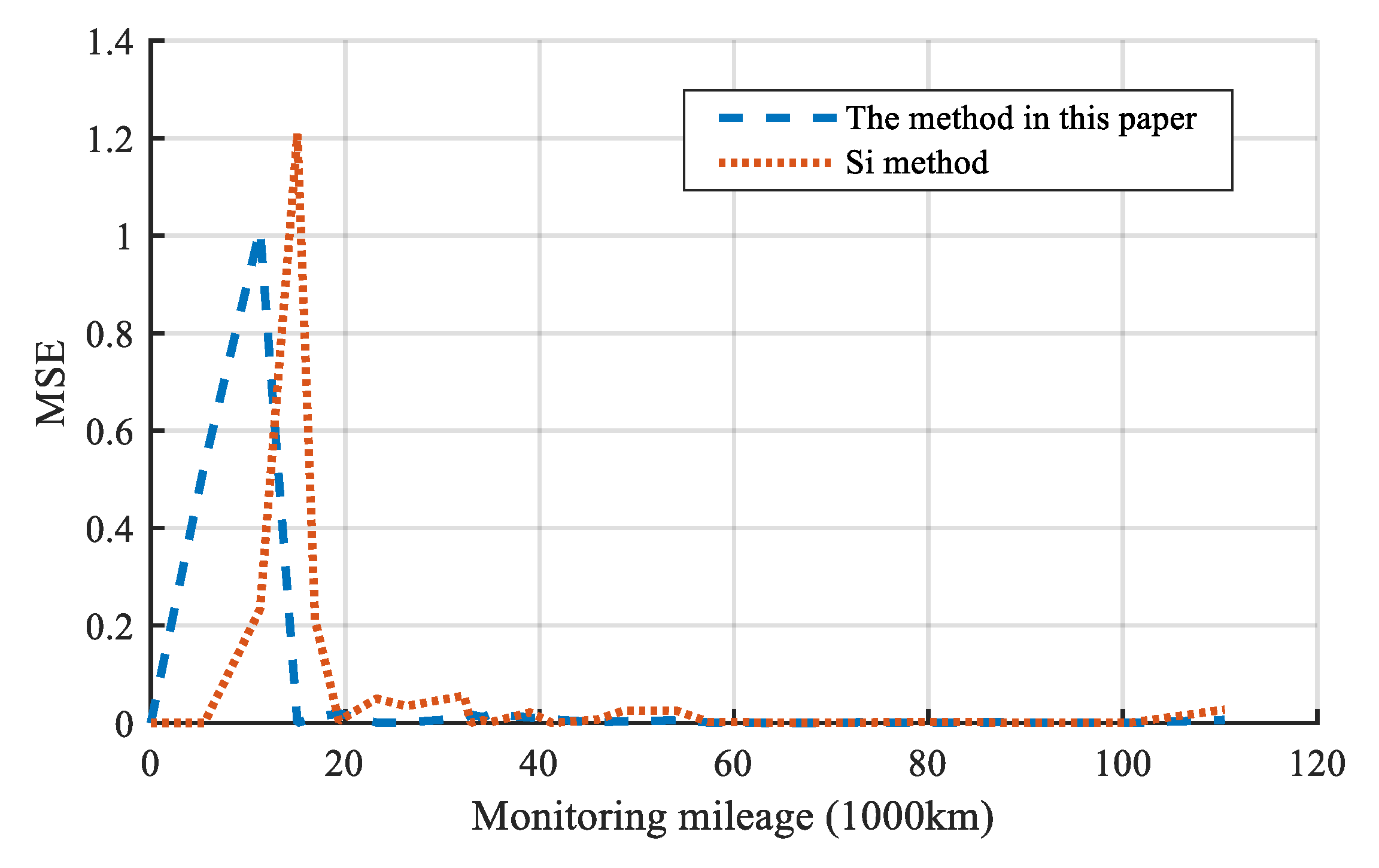
4.3. Comparative Study
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notations | Definition |
|---|---|
| τk | The mileage of kth point |
| Z(τk) | Wear loss at τk |
| Δτk | Actual mileage interval |
| Δτ0 | The average mileage interval of monitoring mileage points |
| T1:k | Equal interval mileage points |
| U(τk) | The unit mileage difference coefficients |
| Δx(0)(τk) | The total difference of every actual mileage segment: |
| X(0)(Tk) | Equal mileage interval wear series |
| X(Tk) | Wear loss at Tk |
| X(T) | Random wear process |
| θ | Coefficient of wear degradation rate |
| σ | The diffusion coefficient, σ > 0 |
| B(T) | Standard Brownian motion |
| Lk | RUL of PCCS |
| RUL at Tk | |
| w | Failure threshold |
| Xk | Wear loss at Tk, Xk = X(Tk) |
| ω | Random error term |
| υ | Random error term |
| Posterior estimation of θ at Tk | |
| Pk|k | Covariance of posterior estimation for θk |
| The prediction of the wear loss by one step | |
| Pk|k-1 | Covariance of priori estimation for θk |
| PDF of RUL prediction for PCCS | |
| The expectation of RUL prediction | |
| D(z) | Dawson integral |
| Θ | Unknown model parameters vector |
| Unknown model parameters | |
| Unknown model parameters | |
| Unknown model parameters | |
| Unknown model parameters | |
| Lk(Θ) | The log-likelihood function of X0:k at Tk for Θ |
| Joint PDF of X0:k and Θ | |
| Maximum likelihood estimation of Θ | |
| The log-likelihood function of expectation in the ith iteration | |
| The result in the i+1th iteration based on X0:k | |
| x(0)(k) | The original parameter series of equal mileage intervals |
| x(1)(k) | The accumulated once parameter series of equal mileage intervals |
| The wear loss series of GM(1,1) | |
| a | Development coefficient |
| b | Grey action |
| p | Weight matrix |
| R | Weight increasing factor |
| The wear loss series of UIWGLRCM | |
| The unequal interval wear series of restoration | |
| Lfail | The actual failure LM |
| MSEk | Mean squared error of the predicted wear and the actual wear |
| Zpre(τk) | The restored wear loss at τk after one-step prediction |
| REk | The relative error between the real and predicted RUL |
| Lreal(τk) | Real RUL |
| Epre(τk) | The expectation of RUL prediction at τk |
Appendix B
References
- Petch, M. Prognostics and Health Management of Electronics; Wiley Online Library: Hoboken, NJ, USA, 2008. [Google Scholar]
- Heng, A.; Zhang, S.; Tan, A.C.C.; Mathew, J. Rotating machinery prognostics: State of the art, challenges and opportunities. Mech. Syst. Signal Process. 2009, 23, 1600–1614. [Google Scholar] [CrossRef]
- Sikorska, J.Z.; Hodkiewicz, M.; Ma, L. Prognostic modeling options for remaining useful life estimation by industry. Mech. Syst. Signal Process. 2011, 25, 1803–1836. [Google Scholar] [CrossRef]
- Jardine, A.; Lin, D. A review on machinery diagnostics and prognostics implementing condition-based maintenance. Mech. Syst. Signal Process. 2006, 20, 1483–1510. [Google Scholar] [CrossRef]
- Hu, C.; Zhou, Z.; Zhang, J.; Si, X. A survey on life prediction of equipment. Chin. J. Aeronaut. 2015, 28, 25–33. [Google Scholar] [CrossRef]
- Gebraeel, N.; Lawley, M.; Liu, R.; Parmeshwaran, V. Residual life predictions from vibration-based degradation signals: A neural network approach. IEEE Trans. Ind. Electron. 2004, 51, 694–700. [Google Scholar] [CrossRef]
- Wang, W.; Carr, M.; Xu, W.; Kobbacy, K. A model for residual life prediction based on Brownian motion with an adaptive drift. Microelectron. Reliab. 2011, 51, 285–293. [Google Scholar] [CrossRef]
- Si, X.; Wang, W.; Hu, C.; Chen, M.; Zhou, D. A Wiener-process-based degradation model with a recursive filter algorithm for RUL estimation. Mech. Syst. Signal Process. 2013, 35, 219–237. [Google Scholar] [CrossRef]
- Gao, Z.; Yin, X.; Zhang, B.; Chen, M.; Li, B. A Wiener process-based remaining life prediction method for light-emitting diode driving power in rail vehicle carriage. Adv. Mech. Eng. 2019, 11, 1–8. [Google Scholar] [CrossRef]
- Hu, Y.; Li, H.; Shi, P.; Chai, Z.; Wang, K.; Xie, X. A prediction method for the real-time remaining useful life of wind turbine bearings based on the Wiener process. Renew. Energy 2018, 127, 452–460. [Google Scholar] [CrossRef]
- Zhang, Z.; Si, X.; Hu, C.; Hu, X.; Sun, G. An adaptive prognostic approach incorporating inspection influence for deteriorating systems. IEEE Trans. Reliab. 2018, 68, 302–316. [Google Scholar] [CrossRef]
- Tang, S.; Yu, C.; Wang, X.; Guo, X.; Si, X. Remaining useful life prediction of lithium-ion batteries based on the Wiener process with measurement error. Energies 2014, 7, 520–547. [Google Scholar] [CrossRef]
- Zhang, Z.; Si, X.; Hu, C.; Lei, Y. Degradation data analysis and remaining useful life estimation: A review on wiener-process-based methods. Eur. J. Oper. Res. 2018, 271, 775–796. [Google Scholar] [CrossRef]
- Yuan, J. Grey System Theory and Application; Science Press: Beijing, China, 1991; pp. 52–57. [Google Scholar]
- Lee, M.; Whitmore, G. Threshold regression for survival analysis: Modeling event times by a stochastic process reaching a boundary. Stat. Sci. 2006, 21, 501–513. [Google Scholar] [CrossRef]
- Meeker, W.; Escobar, L. Statistical Methods for Reliability Data; John Wiley & Sons Inc.: New York, NY, USA, 1998. [Google Scholar]
- Gebraeel, N.; Elwany, A.; Pan, J. Residual life predictions in the absence of prior degradation knowledge. IEEE Trans. Reliab. 2009, 58, 106–117. [Google Scholar] [CrossRef]
- Park, J.; Bae, S. Direct prediction methods on lifetime distribution of organic light-emitting diodes from accelerated degradation tests. IEEE Trans Reliab. 2010, 59, 74–90. [Google Scholar] [CrossRef]
- Elwany, A.; Gebraeel, N.; Maillart, L. Structured replacement policies for components systems with complex degradation processes and dedicated sensors. Oper. Res. 2011, 59, 684–695. [Google Scholar] [CrossRef]
- Wang, D.; Tsui, K. Brownian motion with adaptive drift for remaining useful life prediction: Revisited. Mech. Syst. Signal Process. 2018, 99, 691–701. [Google Scholar] [CrossRef]
- Cai, Z.; Guo, J.; Chen, Y.; Dong, X.; Xiang, H. Remaining lifetime online prediction based on step-stress accelerated degradation modeling. Syst. Eng. Electron. 2018, 40, 2605–2610. [Google Scholar]
- Harvey, A.C. Forecasting Structural Time Series Models and the Kalman Filter; Cambradge University Press: Cambridge, UK, 1989. [Google Scholar]
- Dempster, A.P. Maximum likelihood from incomplete data via the EM algorithm. J. R. Stat. Soc. B 1977, 39, 1–38. [Google Scholar]
- Li, B.; He, C. The combined forecasting method of GM(1,1) with linear regression and its application. In Proceedings of the IEEE International Conference on Grey Systems and Intelligent Services, Nanjing, China, 18–20 November 2007; pp. 394–398. [Google Scholar]
- Deng, J. Control Problems of Grey Systems. Syst. Control Lett. 1982, 1, 288–294. [Google Scholar]





















| Type | LM Interval (×10,000 km) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [0,1) | [1,2) | [2,3) | [3,4) | [4,5) | [5,6) | [6,7) | [7,8) | [8,9) | [9,10) | [10,11) | [11,12) | |
| H type number | 0 | 0 | 4 | 24 | 100 | 82 | 19 | 4 | 3 | 2 | 1 | 1 |
| M type number | 1 | 72 | 140 | 24 | 3 | 0 | -- | -- | -- | -- | -- | -- |
| P type number | 1 | 120 | 108 | 8 | 2 | -- | -- | -- | -- | -- | -- | -- |
| Type | SSE | Adjusted R-Square | RMSE |
|---|---|---|---|
| H | 8.7326e−4 | 0.9952 | 0.0099 |
| M | 2.0689e−4 | 0.9987 | 0.0083 |
| P | 6.5990e−4 | 0.9962 | 0.0148 |
| Sample Parameter | Average | Maximum | Minimum | Standard Deviation |
|---|---|---|---|---|
| H | 5.7691 | 11.1411 | 2.2022 | 1.6709 |
| M | 2.6948 | 5.0949 | 1.0311 | 0.6817 |
| P | 2.3689 | 4.1328 | 1.0092 | 0.6605 |
| Category | Original Thickness mm | Thickness of the Last Point mm | Original Mileage 1000 km | Mileage of the Last Point 1000 km | LM 1000 km |
|---|---|---|---|---|---|
| Sample 1 | 18.5 | 4.6 | 850.786 | 893.473 | 42.687 |
| Sample 2 | 19.10 | 4.7 | 1394.295 | 1504.763 | 110.468 |
| Method | 35% Quantile | 55% Quantile | 75% Quantile | 95% Quantile |
|---|---|---|---|---|
| Si method | 57.1711 | 40.6560 | 28.2535 | 1.3780 |
| (21.66%) | (17.02%) | (12.16%) | (10.05%) | |
| Method of this paper | 64.5765 | 45.9183 | 31.9183 | 1.5580 |
| (11.51%) | (6.28%) | (0.77%) | (1.70%) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, Q.; Wei, X.; Jia, L.; He, Y.; Zhang, H. RUL Prediction of Railway PCCS Based on Wiener Process Model with Unequal Interval Wear Data. Appl. Sci. 2020, 10, 1616. https://doi.org/10.3390/app10051616
Guan Q, Wei X, Jia L, He Y, Zhang H. RUL Prediction of Railway PCCS Based on Wiener Process Model with Unequal Interval Wear Data. Applied Sciences. 2020; 10(5):1616. https://doi.org/10.3390/app10051616
Chicago/Turabian StyleGuan, Qingluan, Xiukun Wei, Limin Jia, Ye He, and Haiqiang Zhang. 2020. "RUL Prediction of Railway PCCS Based on Wiener Process Model with Unequal Interval Wear Data" Applied Sciences 10, no. 5: 1616. https://doi.org/10.3390/app10051616
APA StyleGuan, Q., Wei, X., Jia, L., He, Y., & Zhang, H. (2020). RUL Prediction of Railway PCCS Based on Wiener Process Model with Unequal Interval Wear Data. Applied Sciences, 10(5), 1616. https://doi.org/10.3390/app10051616