Whole-Body Dynamic Analysis of Challenging Slackline Jumping


Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Approach to the Problem
2.2. Slackline Study and Data Acquisition
2.3. Conventional Analysis
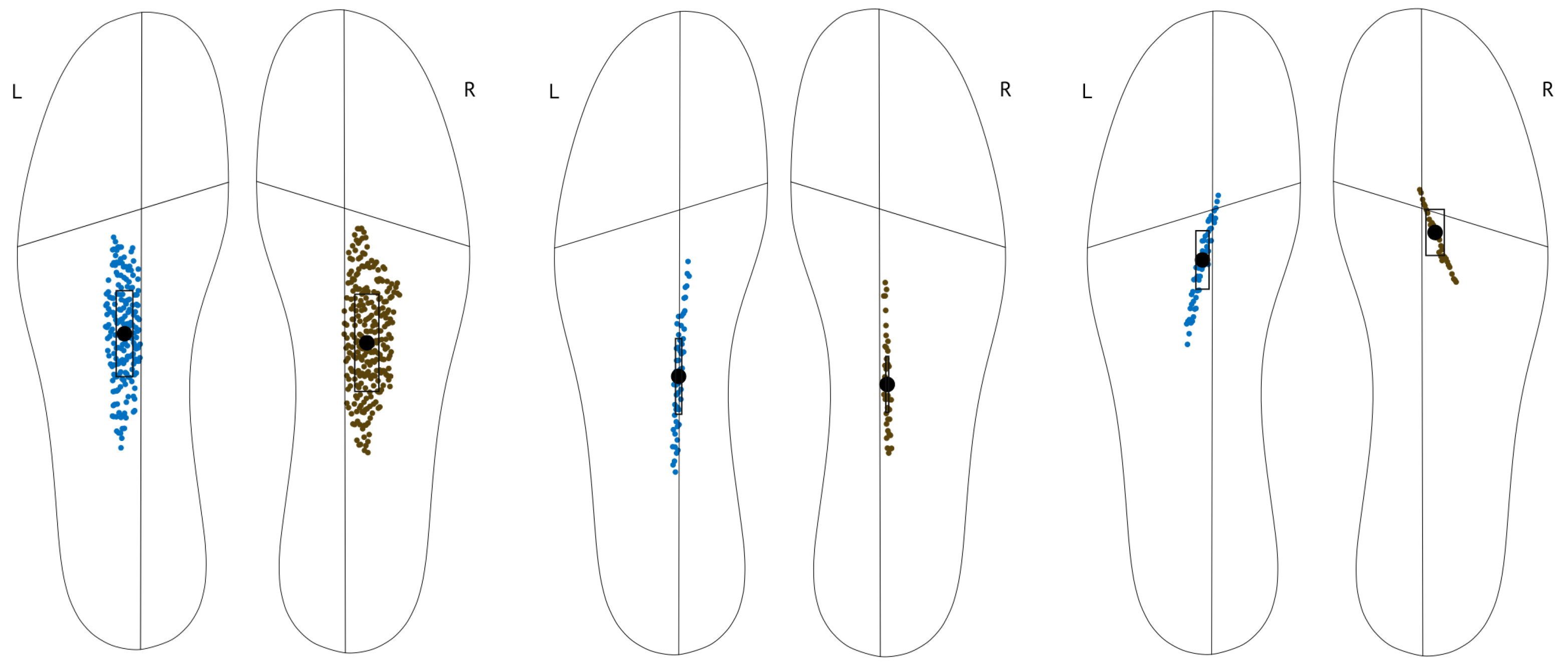
2.4. Experimental Foot Contact Analysis and Modeling—A Pre-Study
- Left: Single leg balancing on regular surface
- Middle: Balancing on the slackline with aligned stance foot
- Right: Balancing on the slackline with turned stance foot
2.5. Proposed Analysis Method
2.5.1. Slackline Contact Modeling
2.5.2. Subject Modeling and Dynamics Computations
2.5.3. Optimal Control Problem Formulation
2.5.4. Validation
- Horizontal momentum is conserved during the flight phase
- Gravity is the only acceleration acting on the CoM during the flight phase
- Angular momentum is conserved during the flight phase
- The change of momentum is proportional to the sum of external forces
- The change of angular momentum is equal to the sum of all acting torques.
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CoM | Center of Mass |
| CoP | Center of Pressure |
| DoF | Degrees of Freedom |
| EoM | Equation of Motion |
| GRF | Ground Reaction Forces |
| L_SAE | Left Scapula Acromial Edge |
| Number of Degrees of Freedom | |
| NLP | Nonlinear Programming Problem |
| RBDL | The Rigid Body Dynamics Library |
| R_SAE | Right Scapula Acromial Edge |
| OCP | Optimal Control Problem |
| SQP | Sequential Quadratic Programming |
| ZMP | Zero Moment Point |
References
- Paoletti, P.; Mahadevan, L. Balancing on tightropes and slacklines. J. R. Soc. Interface R. Soc. 2012, 9, 2097–2108. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Stein, K.; Mombaur, K. Performance indicators for stability of slackline balancing. In Proceedings of the IEEE/RAS International Conference on Humanoid Robots (Humanoids 2019), Toronto, ON, Canada, 15–17 October 2019. [Google Scholar]
- Winter, D. Human balance and posture control during standing and walking. Gait Posture 1995, 3, 193–214. [Google Scholar] [CrossRef]
- Sutherland, D. The evolution of clinical gait analysis: Part II Kinematics. Gait Posture 2002, 16, 159–179. [Google Scholar] [CrossRef]
- Thompson, L.; Badache, M.; Cale, S.; Behera, L.; Zhang, N. Balance performance as observed by center-of-pressure parameter characteristics in male soccer athletes and non-athletes. Sports 2017, 5, 86. [Google Scholar] [CrossRef] [PubMed]
- Xu, F.; Li, X.; Shi, Y.; Li, L.; Wang, W.; He, L.; Liu, R. Recent Developments for Flexible Pressure Sensors: A Review. Micromachines 2018, 9, 580. [Google Scholar] [CrossRef] [PubMed]
- Karatsidis, A.; Bellusci, G.; Schepers, H.M.; de Zee, M.; Andersen, M.S.; Veltink, P.H. Estimation of ground reaction forces and moments during gait using only inertial motion capture. Sensors 2016, 17, 75. [Google Scholar] [CrossRef] [PubMed]
- Emonds, A.L.; Funken, J.; Potthast, W.; Mombaur, K. Comparison of Sprinting with and without Running-Specific Prostheses Using Optimal Control Techniques. Robotica 2019, 37, 2176–2194. [Google Scholar] [CrossRef]
- Stein, K.; Mombaur, K. Optimization-Based Analysis of a Cartwheel. In Proceedings of the 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 909–915. [Google Scholar]
- Leardini, A.; Biagi, F.; Merlo, A.; Belvedere, C.; Benedetti, M.G. Multi-segment trunk kinematics during locomotion and elementary exercises. Clin. Biomech. 2011, 26, 562–571. [Google Scholar] [CrossRef] [PubMed]
- Felis, M. Modeling Emotional Aspects in Human Locomotion. PhD Thesis, Heidelberg University, Heidelberg, Germany, 2015. [Google Scholar]
- Sugihara, T. Solvability-Unconcerned Inverse Kinematics by the Levenberg- Marquardt Method. IEEE Trans. Robot. 2011, 27, 984–991. [Google Scholar] [CrossRef]
- De Leva, P. Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters. J. Biomech. 1996, 29, 1223–1230. [Google Scholar] [CrossRef]
- Jensen, R.K. Body segment mass, radius and radius of gyration proportions of children. J. Biomech. 1986, 19, 359–368. [Google Scholar] [CrossRef]
- Elftman, H. Forces and Energy Changes in the Leg During Walking. Am. J. Physiol. 1939, 125, 339–356. [Google Scholar] [CrossRef]
- Felis, M.L. RBDL: An efficient rigid-body dynamics library using recursive algorithms. Autonomous Robots 2016, 1–17. [Google Scholar] [CrossRef]
- Kuhl, P.; Ferreau, J.; Albersmeyer, J.; Kirches, C.; Wirsching, L.; Sager, S.; Potschka, A.; Schulz, G.; Diehl, M.; Leineweber, D.; et al. MUSCOD-II Users’ Manual; Interdisciplinary Center for Scientific Computing (IWR): Heidelberg, Germany, 2001. [Google Scholar]
- Leinweber, D.; Bauer, I.; Bock, H.; Schloeder, J. An efficient multiple shooting based reduced SQP strategy for large-scale dynamic process optimization. Part I: Theoretical aspects. Comput. Chem. Eng. 2003, 27, 157–166. [Google Scholar] [CrossRef]
- Bock, H.; Plitt, K. A Multiple Shooting Algorithm for Direct Solution of Ooptimal Control Problems; Pergamon Press: Oxford, UK, 1984; pp. 243–247. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Segment | Parent | DoF |
|---|---|---|
| Pelvis | Root | 6d Floating Base |
| Lower Trunk | Pelvis | RY, RZ |
| Upper Trunk | Lower Trunk | RX, RY |
| Head | Upper Trunk | RZ |
| Upper Arm | Upper Trunk | RX, RY, RZ |
| Lower Arm | Upper Arm | RY, RZ |
| Hand | Lower Arm | Fixed |
| Thigh | Pelvis | RX, RY, RZ |
| Shank | Thigh | RY |
| Foot | Shank | RY |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stein, K.; Mombaur, K. Whole-Body Dynamic Analysis of Challenging Slackline Jumping. Appl. Sci. 2020, 10, 1094. https://doi.org/10.3390/app10031094
Stein K, Mombaur K. Whole-Body Dynamic Analysis of Challenging Slackline Jumping. Applied Sciences. 2020; 10(3):1094. https://doi.org/10.3390/app10031094
Chicago/Turabian StyleStein, Kevin, and Katja Mombaur. 2020. "Whole-Body Dynamic Analysis of Challenging Slackline Jumping" Applied Sciences 10, no. 3: 1094. https://doi.org/10.3390/app10031094
APA StyleStein, K., & Mombaur, K. (2020). Whole-Body Dynamic Analysis of Challenging Slackline Jumping. Applied Sciences, 10(3), 1094. https://doi.org/10.3390/app10031094