Enhancement of Power System Transient Stability by the Coordinated Control between an Adjustable Speed Pumping Generator and Battery

 ,
, 
Abstract
1. Introduction
2. Power System Model
2.1. Model System
2.2. Governor Model
- Sg: Deviation of rotor speed
- 65M: Load setting (output reference value)
- 77M: Load limit (65M + rated output × governor operating margin (PLM) (%))
- PLM: Governor operating margin (%) (a percentage of the rated output)
- Pm: Turbine output
2.3. Wind Turbine Model
2.4. Adjustable-Speed Pumping Generator (ASG)
2.4.1. ASG Model
2.4.2. Rotor Excitation System of the ASG
2.4.3. Water Wheel Model of the ASG
2.5. Battery System Model
3. Proposed Control Method
4. Simulation Analysis
4.1. Conditions of the Simulation Analysis
4.2. Fault Condition
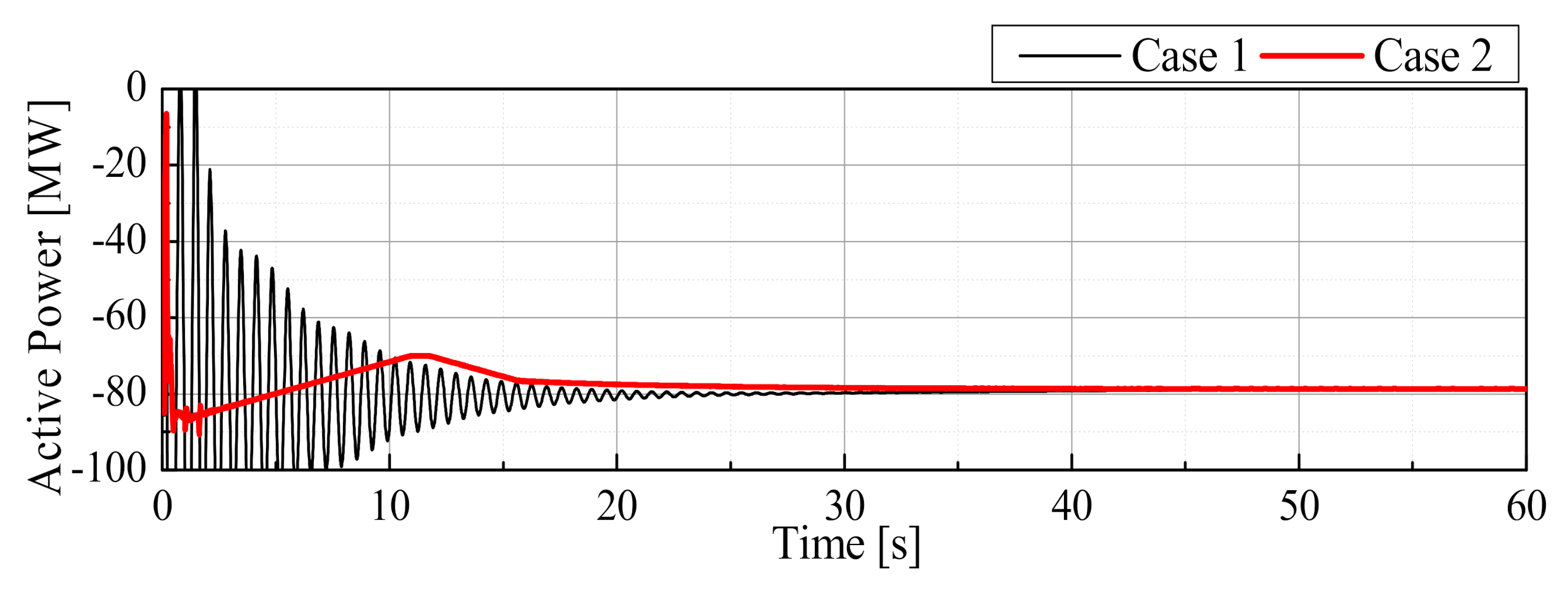
4.3. Simulation Results
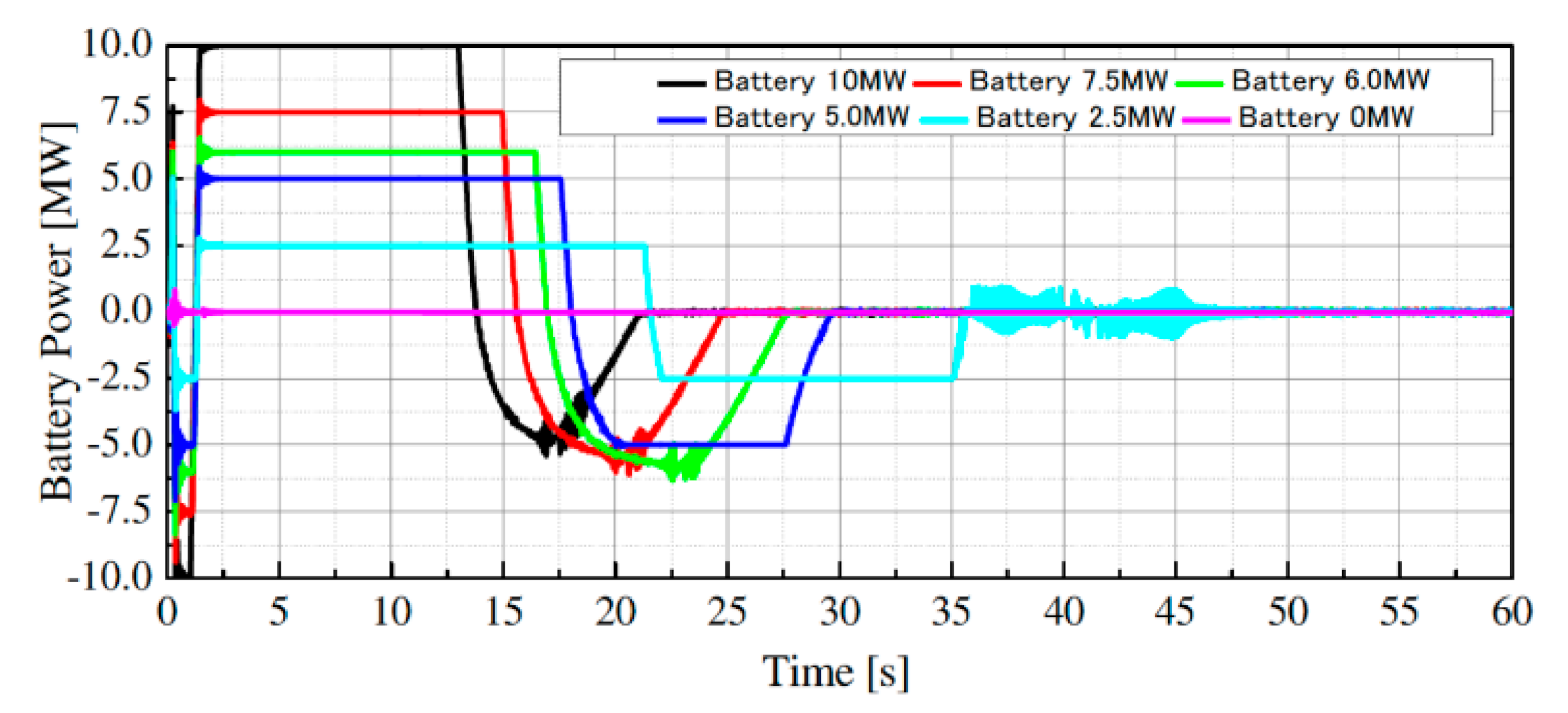
4.4. Consideration of the Minimum Battery Capacity for the Stabilizing Control
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Japan Electric Association. Grid Interconnection Code (JEAC 9701-2012); Japan Electric Association: Chiyoda, Japan, 2012. [Google Scholar]
- Gashi, A.; Kabashi, G.; Kabashi, S.; Ahmetaj, S.; Veliu, V. Simulation the Wind Grid Code Requirements for Wind Farms Connection in Kosovo Transmission Grid. Sci. Res. Energy Power Eng. 2012, 4, 482–495. [Google Scholar] [CrossRef]
- Ono, T.; Arai, J. Frequency Control with Dead Band Characteristic of Battery Energy Storage System for Power System Including Large Amount of Wind Power Generation. IEEJ Trans. Power Energy 2012, 132, 709–717. (In Japanese) [Google Scholar] [CrossRef]
- Chankong, V.; Loparo, K.A. Transient Stability and Voltage Regulation in Multi-machine Power Systems Vis-à-Vis STATCOM and Battery Energy Storage. IEEE Trans. Power Syst. 2014, 30, 2404–2416. [Google Scholar]
- Guan, Y.; Vasquez, J.C.; Guerrero, J.M.; Wang, Y.; Feng, W. Frequency Stability of Hierarchically Controlled Hybrid Photovoltaic-Battery-Hydropower Microgrids. IEEE Trans. Ind. Appl. 2015, 51, 4729–4742. [Google Scholar] [CrossRef]
- Brogan, P.V.; Best, R.J.; Morrow, D.J.; McKinley, K.; Marek, L.K. Effect of BESS Response on Frequency and RoCoF During Underfrequency Transients. IEEE Trans. Power Syst. 2019, 34, 575–583. [Google Scholar] [CrossRef]
- Sato, T.; Umemura, A.; Takahashi, R.; Tamura, J. Cooperative Virtual Inertia Control of PMSG based wind generator and battery for Power System Stability Enhancement. In Proceedings of the 2nd International Conference on Smart Power & Internet Energy Systems (SPIES2020), SP0025, Bangkok, Thailand, 15–18 September 2020. [Google Scholar]
- Kuwabara, T.; Shibuya, A.; Furuta, H.; Kita, E.; Mitsuhashi, K. Design and dynamic response characteristics of 400 MW adjustable speed pumped storage unit for Ohkawachi Power Station. IEEE Trans. Energy Convers. 1996, 11, 376–384. [Google Scholar] [CrossRef]
- Schreier, J.; Bendl, M. Chomat:In Doubly Fed Asynchronous Machine with 3-Level VSI for Variable Speed Pump Storage. In Proceedings of the 14th International Conference on Man-Machine-Environment System Engineering (Lecture Notes in Electrical Engineering (318)); Springer: Berlin/Heidelberg, Germany, 2000; pp. 709–713. [Google Scholar]
- Chomat, M.; Schreier, L.; Bendl, J. Optimal control of power unit with doubly fed machine. In Proceedings of the IEEE International Electric Machines and Drives Conference (IEMDC 2001), Cambridge, MA, USA, 17–20 June 2001. [Google Scholar] [CrossRef]
- Gjengedal, T. Application of adjustable speed hydro (ASH) machines in the Norwegian power system. In Proceedings of the 2001 IEEE Porto Power Tech Proceedings, Porto, Portugal, 10–13 September 2001. [Google Scholar]
- Krenn, J.; Keck, H.; Sallaberger, M. Small and Mid-Size Pump-Turbines with Variable Speed. Energy Power Eng. 2013, 5, 48–54. [Google Scholar] [CrossRef]
- Muljadi, E.; Singh, M.; Gevorgian, V.; Mohanpurkar, M.; Hovsapian, R.; Koritarov, V. Dynamic modeling of adjustable-speed pumped storage hydropower plant. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015. [Google Scholar] [CrossRef]
- Valavi, M.; Nysveen, A. Variable-Speed Operation of Hydropower Plants: A Look at the Past, Present, and Future. IEEE Ind. Appl. Mag. 2018, 24, 18–27. [Google Scholar] [CrossRef]
- Bortoni1, E.; de Souza, Z.; Viana, A.; Villa-Nova, H.; Rezek, Â.; Pinto, L.; Siniscalchi, R.; Bragança, R.; Bernardes, J., Jr. The Benefits of Variable Speed Operation in Hydropower Plants Driven by Francis Turbines. Energies 2019, 12, 3719. [Google Scholar] [CrossRef]
- Anderson, P.M.; Found, A.A. Power System Control and Stability; IEEE Press: New York, NY, USA, 1994. [Google Scholar]
- Rosyadi, M.; Umemura, A.; Takahashi, R.; Tamura, J.; Uchiyama, N.; Ide, K. Simplified Model of Variable Speed Wind Turbine Generator for Dynamic Simulation Analysis. IEEJ Trans. Power Energy 2015, 135, 538–549. [Google Scholar] [CrossRef]
- Liu, J.; Rosyadi, M.; Umemura, A.; Takahashi, R.; Tamura, J. A Control Method of Permanent Magnet Wind Generators in Grid Connected Wind Farm to Damp Load Frequency Oscillation. IEEJ Trans. Power Energy 2014, 134, 393–398. [Google Scholar] [CrossRef]
- Nakamura, A.; Umemura, A.; Takahashi, R.; Tamura, J.; Sakahara, A.; Tosaka, F.; Nakamoto, R. Stabilization of Power System including Wind Farm by Two-Step P and Q control of HVDC Interconnection Line. In Proceedings of the 2nd International Conference on Smart Power & Internet Energy Systems (SPIES2020), SP0014, Bangkok, Thailand, 15–18 September 2020. [Google Scholar]
- Wasynczuk, O.; Man, D.T.; Sullivan, J.P. Dynamic Behavior of a Class of Wind Turbine Generators During Random Wind Fluctuations. IEEE Trans. Power Appar. Syst. 1981, PAS-100, 2837–2845. [Google Scholar] [CrossRef]
- Tokida, A.; Tahara, S.; Yoshida, Y.; Umemura, A.; Tkahashi, R.; Tamura, J. Frequency Control of Power System with Wind Farm by Output Frequency Band Control of Adjustable-Speed Pumped-Storage Generator. In Proceedings of the 5th IET International Conference on Renewable Power Generation (RPG2016), London, UK, 21–23 September 2016. [Google Scholar]
- Takahashi, R.; Tamura, J.; Tada, Y.; Kurita, A. Model Derivation of Adjustable Speed Generator and its Excitation Control System. IEEJ Trans. Power Energy 2004, 124, 181–189. (In Japanese) [Google Scholar] [CrossRef][Green Version]
- Working Group on Prime Mover and Energy Supply. Models for System Dynamics Performance Studies: Hydraulic turbine and turbine control models for system dynamics studies. IEEE Trans. Power Syst. 1992, 7, 167–179. [Google Scholar] [CrossRef]
- Onuka, S.; Umemura, A.; Takahashi, R.; Tamura, J.; Sakahara, A.; Tosaka, F.; Nakamoto, R. Frequency Control of Power System with Renewable Power Sources by HVDC Interconnection Line and Battery Considering Energy Balancing. J. Power Energy Eng. 2020, 8, 11–24. [Google Scholar] [CrossRef][Green Version]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| - | Generator | MVA | Frequency Control | 65M | 77M |
|---|---|---|---|---|---|
| ASG | Hydro | 100 | AFC *3 | 0.6 *1 | 1.0 *1 |
| −0.85 *2 | −1.0 *2 | ||||
| SG1 | Hydro | 200 | LFC *4 | LFC Signal | 1.0 |
| SG2 | Thermal | 300 | GF *5 | 0.7 | 0.735 |
| SCIG *6 | Wind Farm | 100 | |||
| Load (MW) | 480 *1 | ||||
| 335 *2 | |||||
| Case | Explanation |
|---|---|
| 1 | FSG is operating and frequency control is not activated (no battery) |
| 2 | Proposed control (ASG and battery are operating based on the proposed controllers) |
| - | Reference Speed (p.u.) | |
|---|---|---|
| Generator | Generating | Pumping |
| FSG | 1.0 | 1.0 |
| ASG | 0.97 (0.9–1.1) | 0.97 (0.9–1.03) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tamura, J.; Umemura, A.; Takahashi, R.; Sakahara, A.; Tosaka, F.; Nakamoto, R. Enhancement of Power System Transient Stability by the Coordinated Control between an Adjustable Speed Pumping Generator and Battery. Appl. Sci. 2020, 10, 9034. https://doi.org/10.3390/app10249034
Tamura J, Umemura A, Takahashi R, Sakahara A, Tosaka F, Nakamoto R. Enhancement of Power System Transient Stability by the Coordinated Control between an Adjustable Speed Pumping Generator and Battery. Applied Sciences. 2020; 10(24):9034. https://doi.org/10.3390/app10249034
Chicago/Turabian StyleTamura, Junji, Atsushi Umemura, Rion Takahashi, Atsushi Sakahara, Fumihito Tosaka, and Ryosuke Nakamoto. 2020. "Enhancement of Power System Transient Stability by the Coordinated Control between an Adjustable Speed Pumping Generator and Battery" Applied Sciences 10, no. 24: 9034. https://doi.org/10.3390/app10249034
APA StyleTamura, J., Umemura, A., Takahashi, R., Sakahara, A., Tosaka, F., & Nakamoto, R. (2020). Enhancement of Power System Transient Stability by the Coordinated Control between an Adjustable Speed Pumping Generator and Battery. Applied Sciences, 10(24), 9034. https://doi.org/10.3390/app10249034