1. Introduction
As autonomous driving technology has rapidly developed and become closer to commercialization, ensuring that stability and reliability of vehicle control and communication technologies are getting more important [
1,
2]. In particular, the quantity of data exchanged in a vehicle has increased exponentially owing to sensors, such as cameras, LiDAR, and radar, for recognizing other vehicles and road conditions and controlling the vehicle, in addition to external communication via V2X technology [
3,
4]. This increase in the amount of data inside of a vehicle has led to limitations in existing in-vehicle network (IVN) protocols such as controller area network (CAN), local interconnect network (LIN), and FlexRay. Thus, a new communication protocol that ensures high bandwidth is required as a solution.
Ethernet is one such communication technology that provides a high bandwidth [
5]. However, Ethernet tends to cost more because it requires connection equipment, such as switches, and uses a 1:1 connection. It also introduces problems such as providing a higher performance than necessary for certain devices. Furthermore, many sensors simply do not have an option to connect to an Ethernet. Accordingly, a more realistic alternative, at present, is to use both a conventional vehicle network such as CAN and a high-bandwidth network such as Ethernet, for which a gateway connects the different networks [
6].
The performance of an autonomous vehicle, which integrates and processes the data measured from various sensors, may vary depending on whether there is time information of the sensor measurement [
7,
8,
9,
10]. This is because the controller may have temporal distortion, that is, it is trying to perceive its situation by patching up numerous pieces of information that may be captured at different instants. In contrast, sensor measurements with time information allow the autonomous driving controller to be aware of time differences among the measurements and to compensate for the time differences for better perception of the situation. Therefore, to improve autonomous vehicle performance, increasing research is being conducted concerning time synchronization among the sensors and controllers connected via communication networks.
For widely-used CAN networks, ECUs (electronic controller units) can be synchronized by using AutoSAR 4.2.2, which is a well-known middleware for ECUs [
11,
12]. Time synchronization with AutoSAR has a master and slave structure; the slave calculates the delay and offset and corrects its own clock via two messages transmitted from the master. Within this process, time can be synchronized, such that the clock error between the master and slave is within a maximum of 10 µs [
11,
12]. However, AutoSAR requires quite significant computing resources, which makes it difficult to be implemented on every CAN node. In a FlexRay network, the time synchronization is based on the fact that the send and receive time points of all static messages are known to each FlexRay node. All FlexRay nodes compare the a priori known time points with the time points of synchronization messages actually received. Then FlexRay nodes create a sorted list of differences, from which they compute their offset correction value using the fault tolerant midpoint (FTM) algorithm [
13]. Time-triggered Ethernet (TT-Ethernet) adopts a distributed time-synchronization algorithm and maintains global time by exchanging protocol control frames (PCFs) among synchronization components [
14]. Synchronization components include a synchronization master (SM), a synchronization client (SC), and a compression master (CM). The synchronization process is as follows: first, the SM sends PCFs to the CM, and the CM calculates the average of PCF reception times and sends them to SMs and SCs by loading them into the new PCF. The new PCF is then used to calibrate nodes clocks [
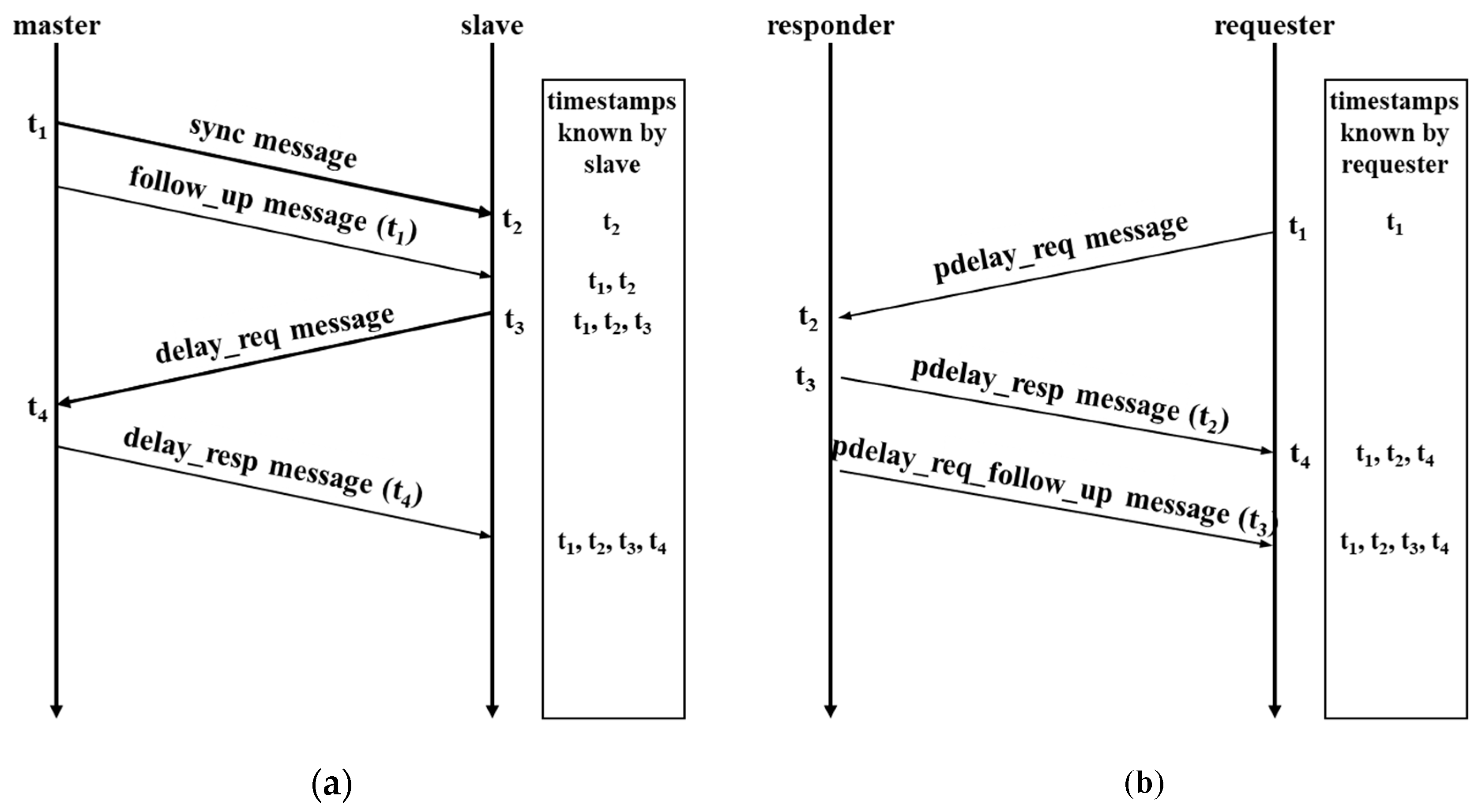
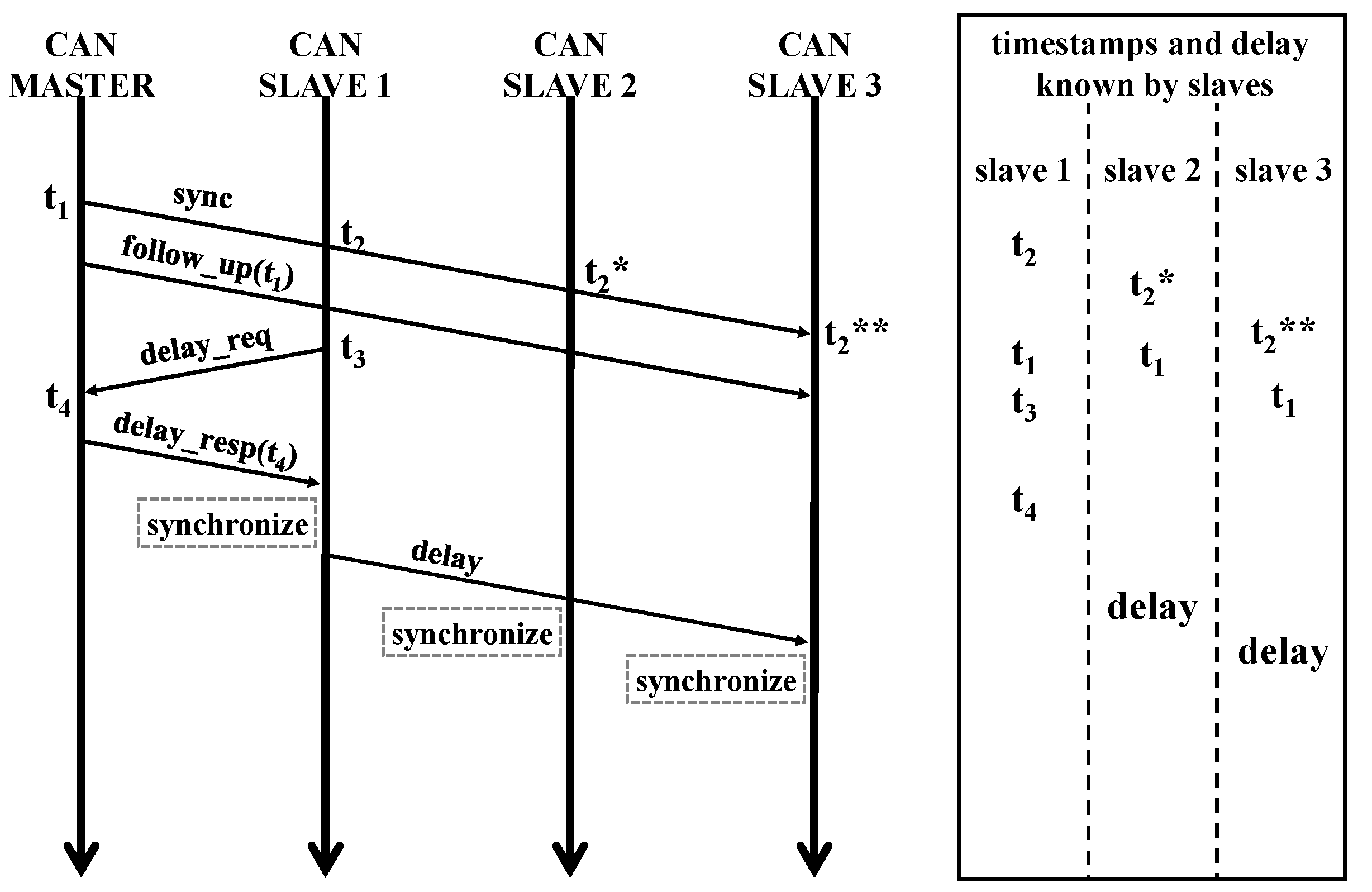
15]. However, it is difficult to expect extremely-precise time synchronization for all nodes because FlexRay and TT-Ethernet use average values to compensate for delays for time synchronization. In contrast, time synchronization in an Ethernet network can be accomplished by using the precision time protocol (PTP), which is specified by IEEE 1588 standard [
16]. In the PTP, the time is synchronized by exchanging four messages between the master and slave nodes. The time-synchronization error can be controlled to units of nanoseconds depending on the type of timestamp, thereby permitting highly-precise time synchronization [
16,
17].
Hence, while the time-synchronization method for a single-protocol network, either CAN or Ethernet network is established, heterogeneous communication environments, such as a CAN–Ethernet network, require additional work to achieve time synchronization. In particular, a CAN needs some type of synchronization unless each node runs AutoSAR while FlexRay and media oriented systems transport (MOST) have their own synchronization mechanisms built as a part of their protocols. For a CAN network, Park applied the time-synchronization mechanism of IEEE 1588 [
18]. Next, Lee presented a method for improving the quality of service (QoS) of the network in a vehicle that applies the time trigger technique of FlexRay and Ethernet [
19]; in the study, external clocks of the Ethernet nodes and gateway were first synchronized through the PTP. Then, by setting the external clock of the gateway synchronized through the PTP as the global clock, the devices in the FlexRay area were synchronized using the time-synchronization protocol supported by FlexRay. However, the study conducted by Lee used two synchronization protocols, and it was limited because a gateway with an external clock was necessary. Therefore, we focused on the time synchronization of CAN–Ethernet network because CAN is almost a de facto standard with no synchronization procedure except using AutoSAR. Furthermore, Ethernet with TSN functionalities can provide high bandwidth, time synchronization, and real-time capability.
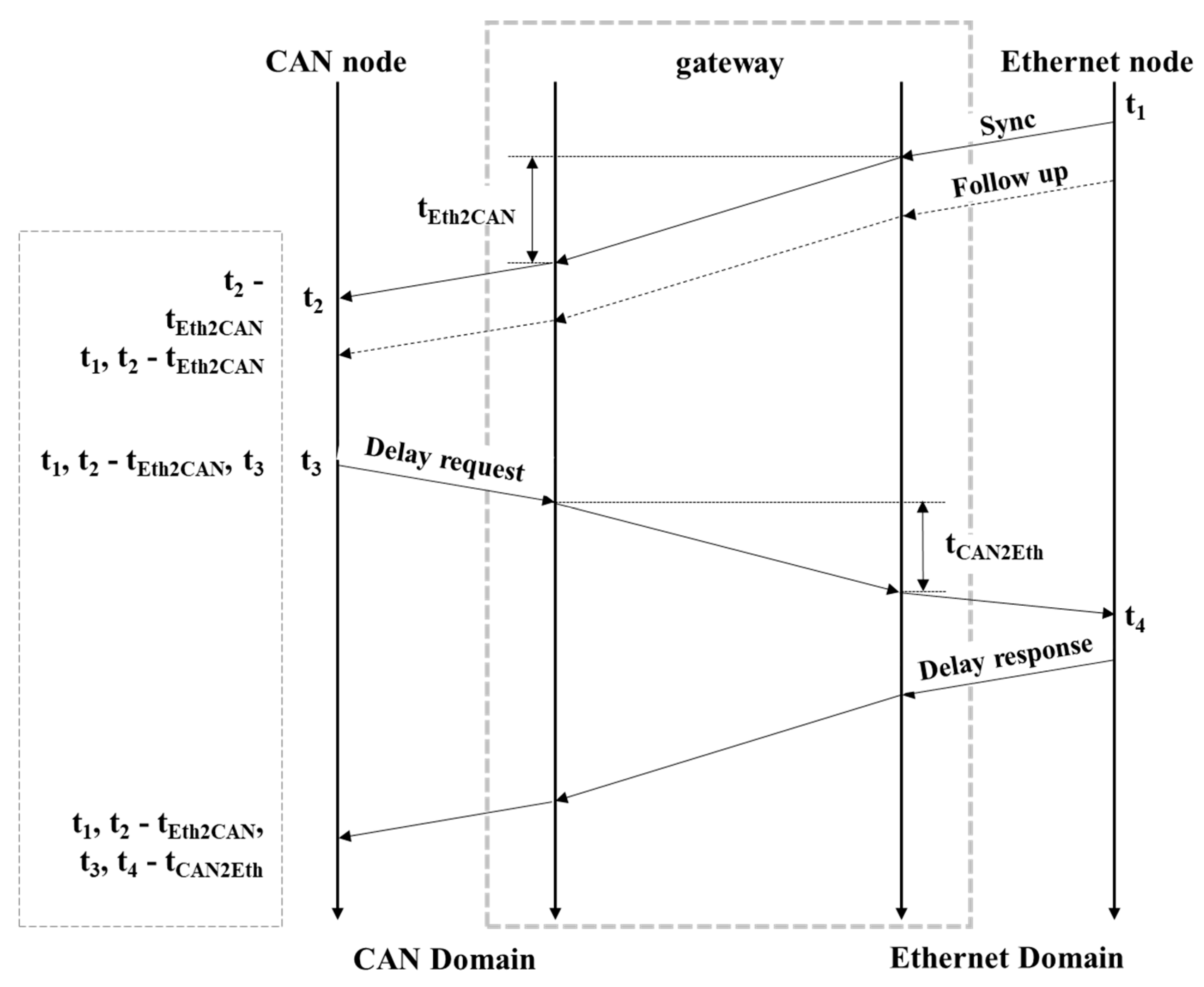
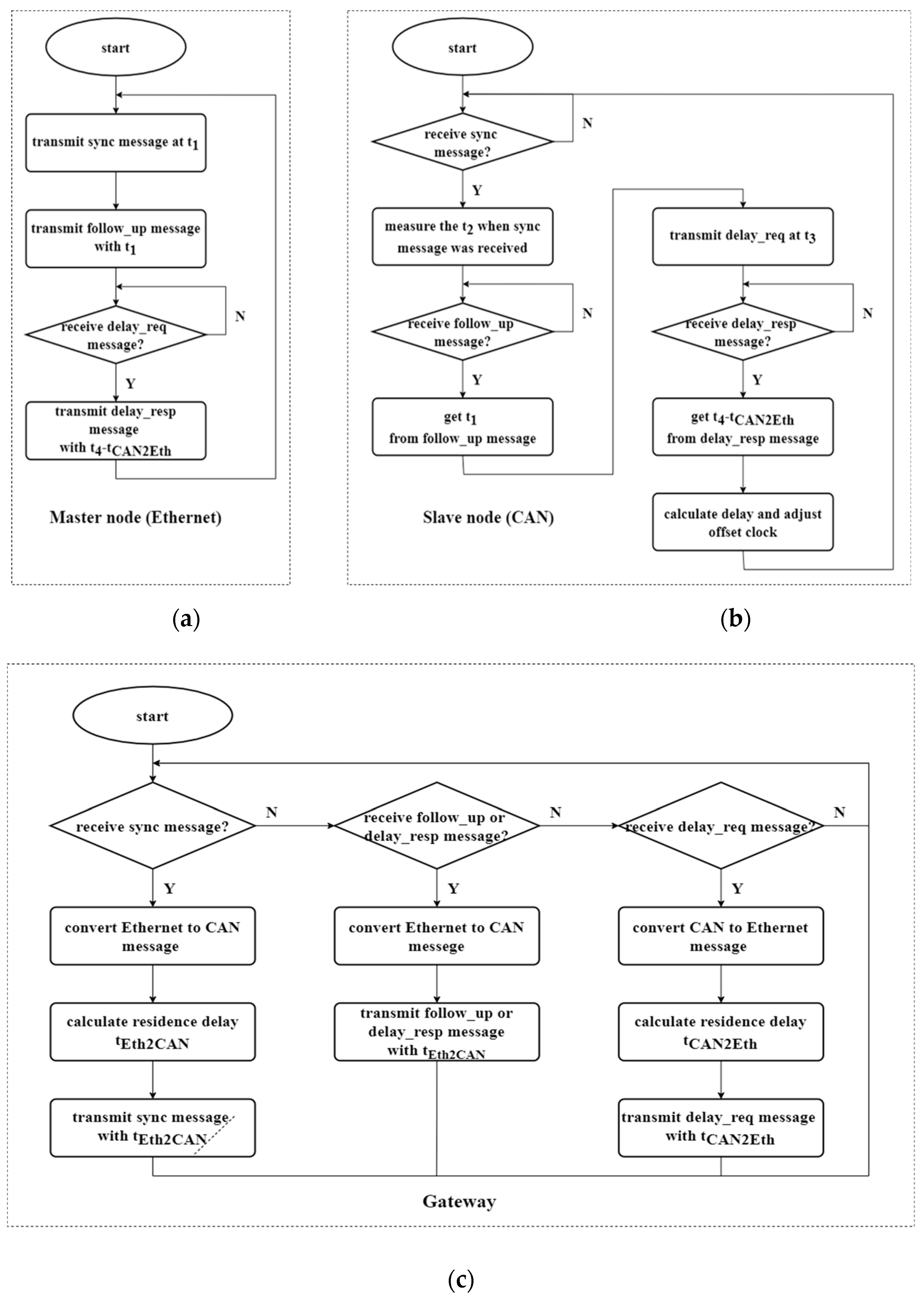
This study proposes a time-synchronization method for CAN–Ethernet-heterogeneous communication networks. A method for applying the PTP mechanism to CAN communication to achieve precise time synchronization and a method for correcting the processing delay_required by the gateway is proposed. Furthermore, a laboratory-scale network environment was configured to assess the synchronization performance, and the applicability of the proposed time-synchronization method was confirmed.
This paper consists of five sections.
Section 2 describes the IEEE 1588-based time-synchronization method for Ethernet networks, and
Section 3 describes the proposed time-synchronization method for CAN–Ethernet networks.
Section 4 presents the performance evaluation environment and results of the proposed time-synchronization method, and
Section 5 lists conclusions of the study and describes the direction of future research.
4. Evaluation of the CAN–Ethernet Network Time-Synchronization Performance
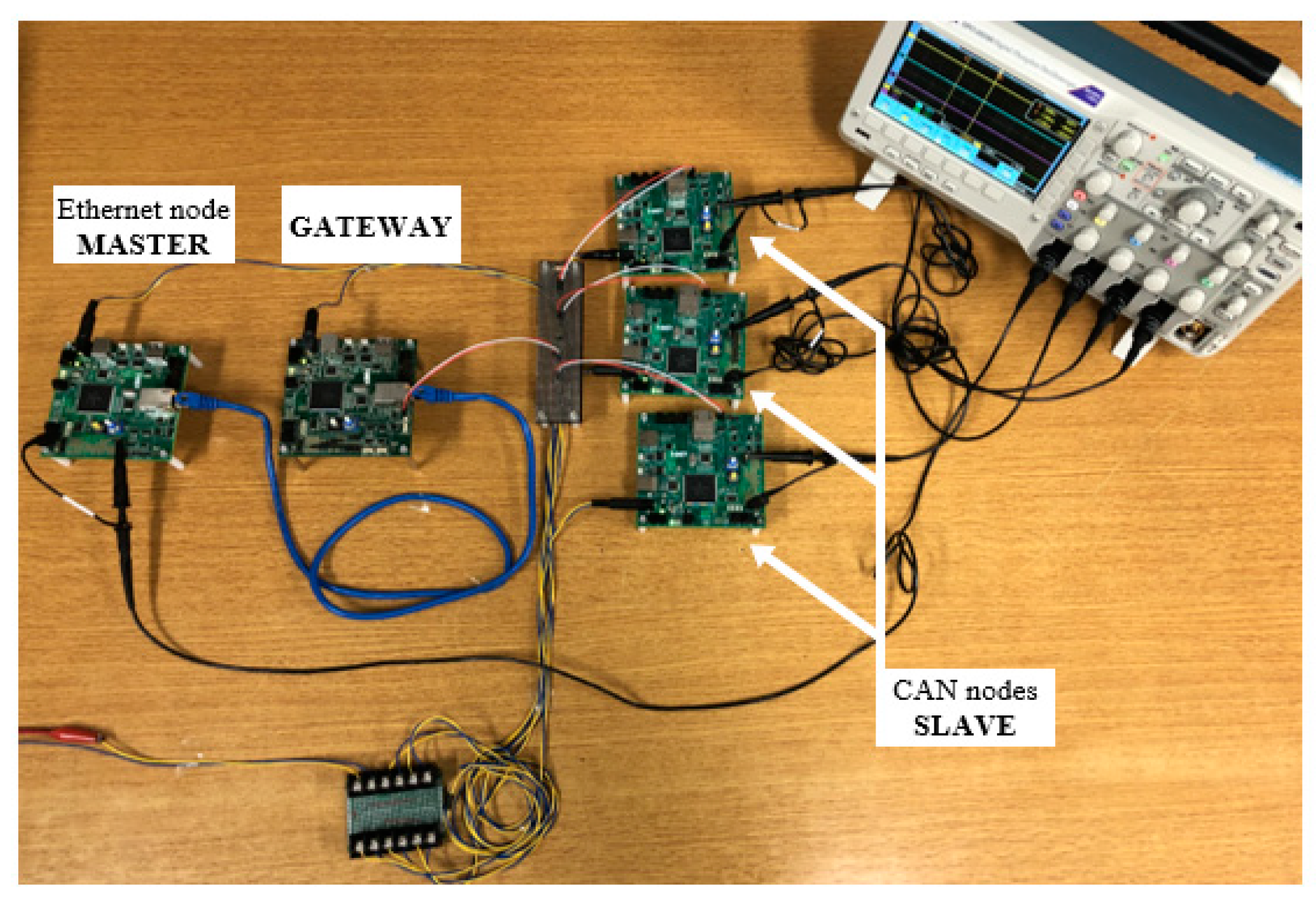
Figure 6 shows the experimental setup for the performance evaluation of the CAN–Ethernet network synchronization. Five NXP MPC5748-LCEVB modules were used for the nodes and gateway. MPC5748 is a chipset for vehicle use and supports CAN (CAN FD) and 100-Mbps Ethernet networks. The network topology for the performance evaluation comprised a master node (Ethernet), gateway, and three slave nodes (CAN), and an oscilloscope was used to measure the synchronization error. To emulate a CAN network with many nodes, CAN slave 3 was connected with a 15 m cable. To generate timestamps, each node used a software-based timestamp.
The synchronization error is defined as the difference in the perceived global times. To measure the error, slave nodes were programmed to output trigger signals to a certain pin so that the oscilloscope captured the time instants. In addition, the synchronization procedure was periodically repeated every 1 s to limit the effect of difference in clock rates. The trigger signal for measuring synchronization performance was set to output approximately 800 ms after the time synchronization ended.
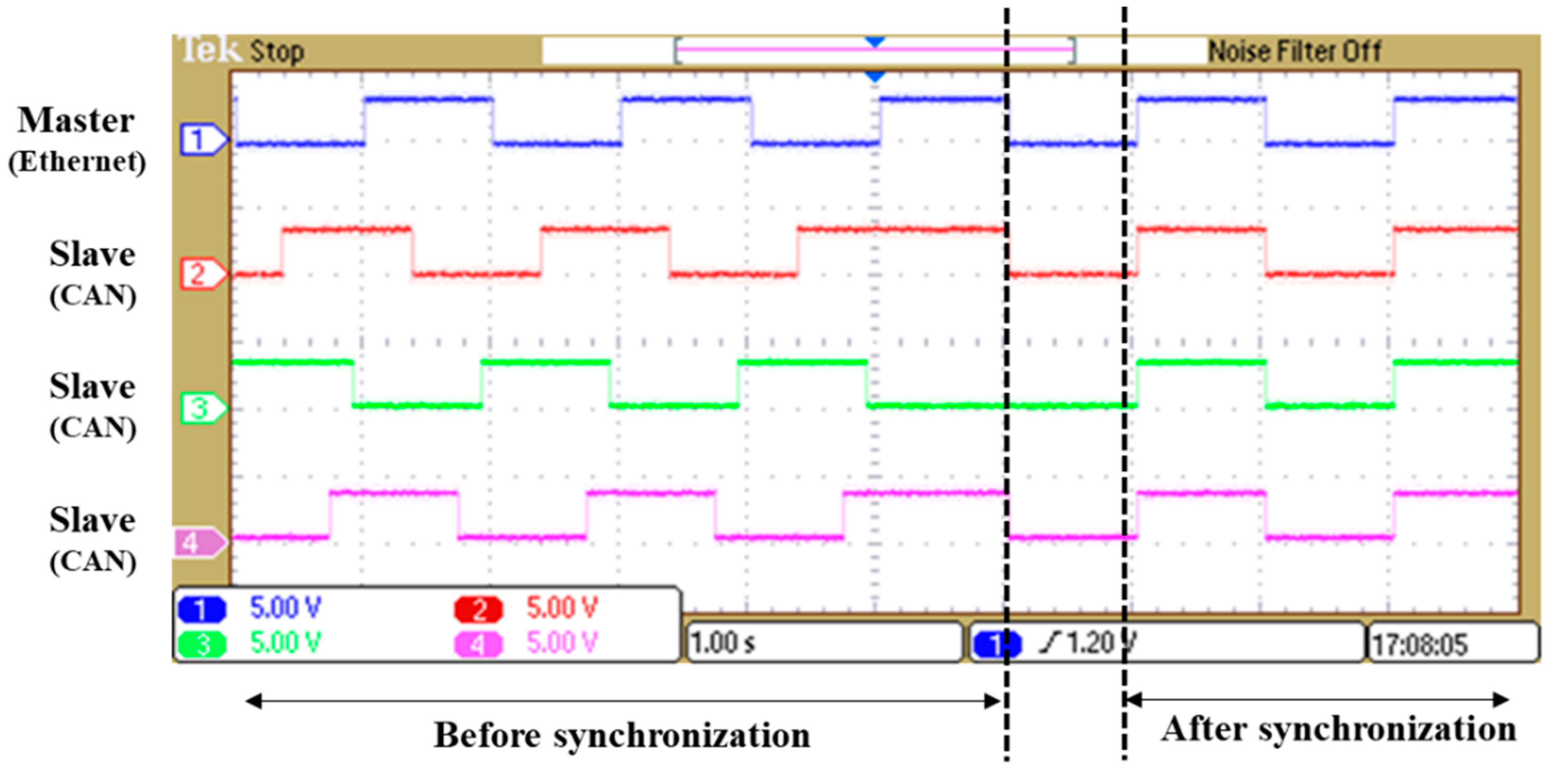
Figure 7 demonstrates the time difference of the trigger signals from the nodes before and after time synchronization was performed. The rising edges of the output signals from the nodes were not aligned before synchronization while the edges were rising almost simultaneously after synchronization. These results confirmed that the proposed algorithm enables time synchronization in the CAN–Ethernet network.
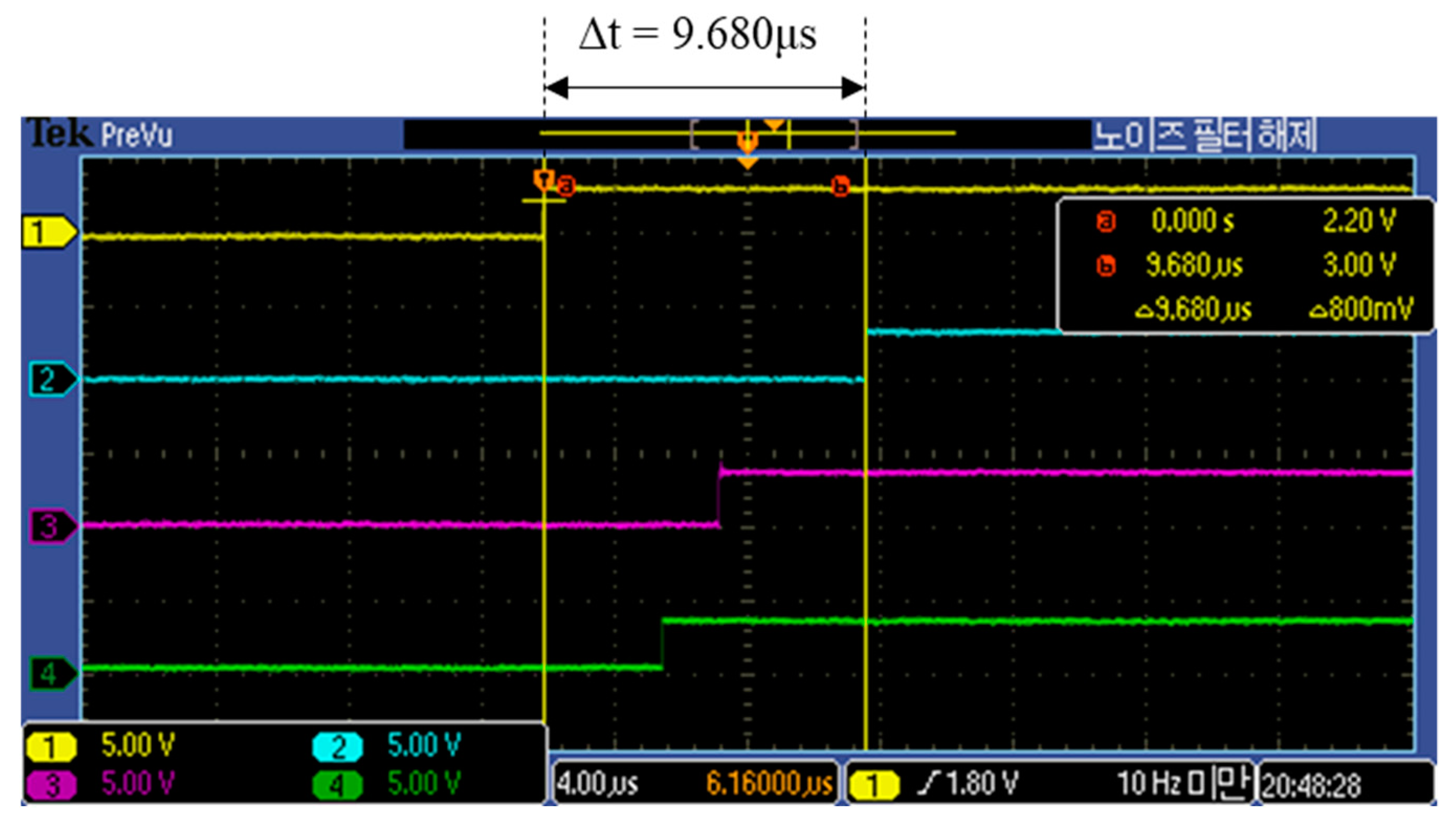
Figure 8 shows the oscilloscope measurement results of the synchronization error occurring in the four nodes after performing time synchronization in the CAN–Ethernet network. According to the measurements, when the proposed synchronization algorithm was applied, the maximum synchronization error between the master and slave was approximately 9.68 μs.
Table 1 presents the synchronization error when the above experiment was repeated ten times. The average of the synchronization errors was approximately 8.18 µs, with a worst-case error of 9.68 μs. Although various factors can cause this error, the timestamp function, which measures and records time, is most likely to significantly influence this error, because it is operated by software.
5. Conclusions
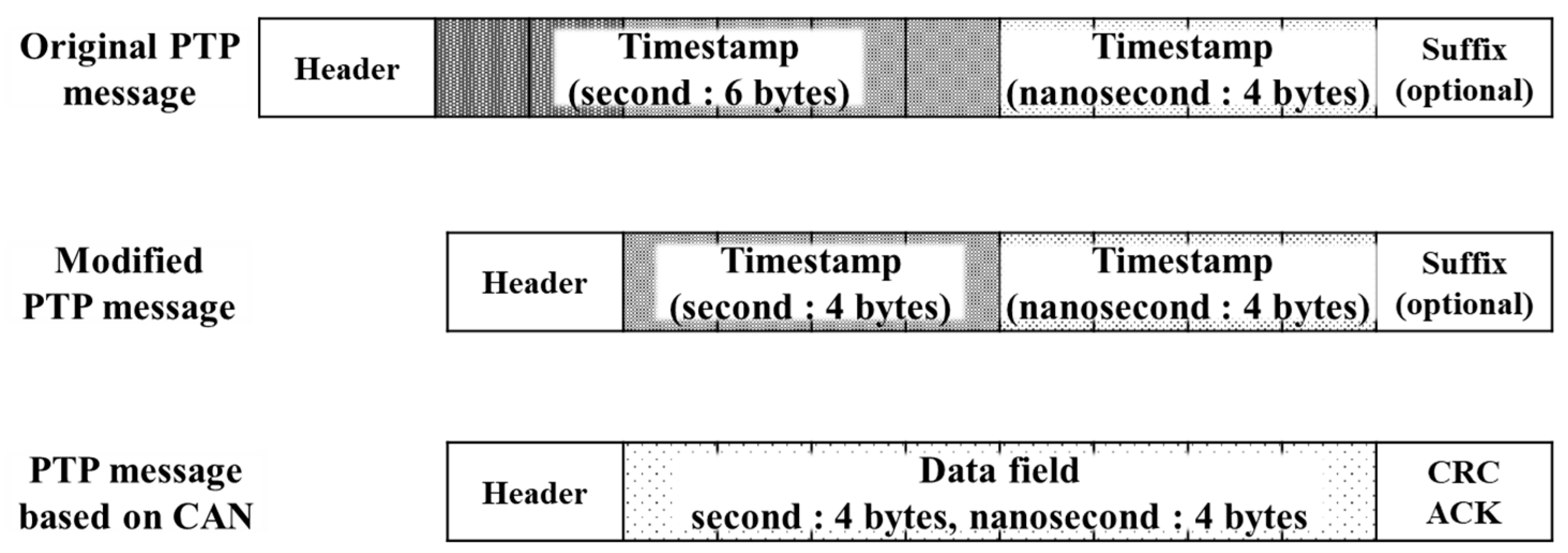
This study proposed a method for performing time synchronization on a CAN–Ethernet heterogeneous network connected by a gateway. In particular, the study proposed a time-synchronization method that considered the processing delay in the gateway required to convert the messages. Moreover, a synchronization method for CAN networks was proposed in which the slaves shared the calculated delay to simplify the procedure by exploiting CAN’s bus topology. In addition, the CAN message format was proposed to convey PTP messages over the CAN network. Finally, a test bed was constructed using automotive microcontroller modules, and used to evaluate the time- synchronization performance of the proposed method for heterogeneous CAN–Ethernet networks. The following conclusions may be drawn from the obtained results.
First, the synchronization method of IEEE 1588 was extended to develop a synchronization method for heterogeneous networks connected by a gateway. For this purpose, equations were derived to calculate the propagation delay and offset by considering the asymmetric processing time of the gateway. Furthermore, to implement the required synchronization technique, this study proposed a method that accommodates the maximum data size constraint of the CAN and the difference in bus transmission methods.
Second, the evaluation of synchronization performance demonstrated that the proposed method has an error of approximately 7 µs. While this does not satisfy the 1 µs error suggested in IEEE 1588, it indicates that the method can provide satisfactory synchronization precision for applications, such as autonomous driving, despite the use of software timestamps. Therefore, because the output of the sensors connected to the synchronized CAN nodes is measured within approximately 7 µs, it is expected to enhance context recognition performance via sensor fusion.
In terms of future research directions, follow-up studies may replace the software timestamps with hardware timestamps and experimentally verify the extent to which the system performance can be improved. Research is also required concerning methods to introduce the P2P method of IEEE 1588 and the selection of the appropriate CAN nodes to perform synchronization with the Ethernet master node. In addition, more research effort on synchronization should be directed to more complicated network structures such as Ethernet connected with tandem CAN networks and other types of heterogeneous networks, namely, CAN-MOST and CAN-FlexRay.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}