Hybrid GA-SOCP Approach for Placement and Sizing of Distributed Generators in DC Networks




Abstract
1. Introduction
- 🗸
- The reformulation of the problem of the optimal placement and sizing of DGs in DC networks that allows transforming the original mixed-integer nonlinear programming (MINLP) model into a mixed-integer second-order cone programming (MI-SOCP) one.
- 🗸
- The solution of the proposed MI-SOCP model with a hybrid master-slave optimization methodology, where the master stage is guided by a genetic algorithm to determine the best locations for the DGs, while the slave stage allows for solving the optimal power flow problem by using the SOCP formulation via interior point methods to determine the best sizes of the DGs.
- 🗸
- The computational results demonstrate that the hybrid GA-SOCP approach has an efficiency higher than 70% to find the global optimal solution in both test feeders analyzed. In addition, the proposed approach presents better solutions than commercial solvers available in GAMS and classical metaheuristics such as genetic algorithms and particle swarm optimizer, and derived approaches
2. MINLP Model
3. Proposed Hybrid GA-SOCP Optimization Approach
3.1. Slave Stage: Second-Order Cone Programming
3.2. Master Stage: Genetic Algorithm
3.2.1. Initial Population
3.2.2. Fitness Function Evaluation
3.2.3. Selection
3.2.4. Recombination
3.2.5. Mutation
3.2.6. Fitness Function Evaluations and Replacement of the Population
3.2.7. Stopping Criteria
- 🗸
- If the maximum number of iteration is reached, the optimization procedure ends by reporting the best solution obtained in the current population.
- 🗸
- If during consecutive iterations, the best objective function has not improved, then the optimization procedure ends by reporting the best solution obtained in the current population.
3.3. Pseudocode of the Proposed Hybrid Optimization Algorithm
| Algorithm 1: Proposed master-slave optimization approach for the optimal location and sizing of distributed generators (DGs) in DC distribution networks | |
| 1: | Inputs: |
| 2: | Read the data of the DC network; |
| 3: | Define the number of generators available, i.e., |
| 4: | Define the percentage of penetration of distributed generation i.e., ; |
| 5: | Generate the initial population ; |
| 6: | Evaluate the fitness function for each individual in the population (see the slave stage); |
| 7: | Make ; |
| 8: | while do |
| 9: | Select two parents from the population; |
| 10: | Make recombinations for generating two offspring individuals; |
| 11: | Apply the mutation operator for each offspring population; |
| 12: | Evaluate the fitness function of the offspring individuals, i.e., slave stage (see optimization model (14)–(18)); |
| 13: | Select the offspring with the minimum fitness function; |
| 14: | Replace the worst individual in the population with the selected offspring if the offspring has the best objective function and fulfills the diversity criterion; |
| 15: | if then |
| 16: | Select as the solution of the problem, the individual with the best objective function in the current population ; |
| 17: | Return the optimal solution concerning the location and sizing of DGs (see the slave stage); |
| 18: | break; |
| 19: | end if |
| 20: | ; |
| 21: | end while |
| 22: | Output: |
| 23: | The best solution is found for the MINLP model; |
4. Test Systems
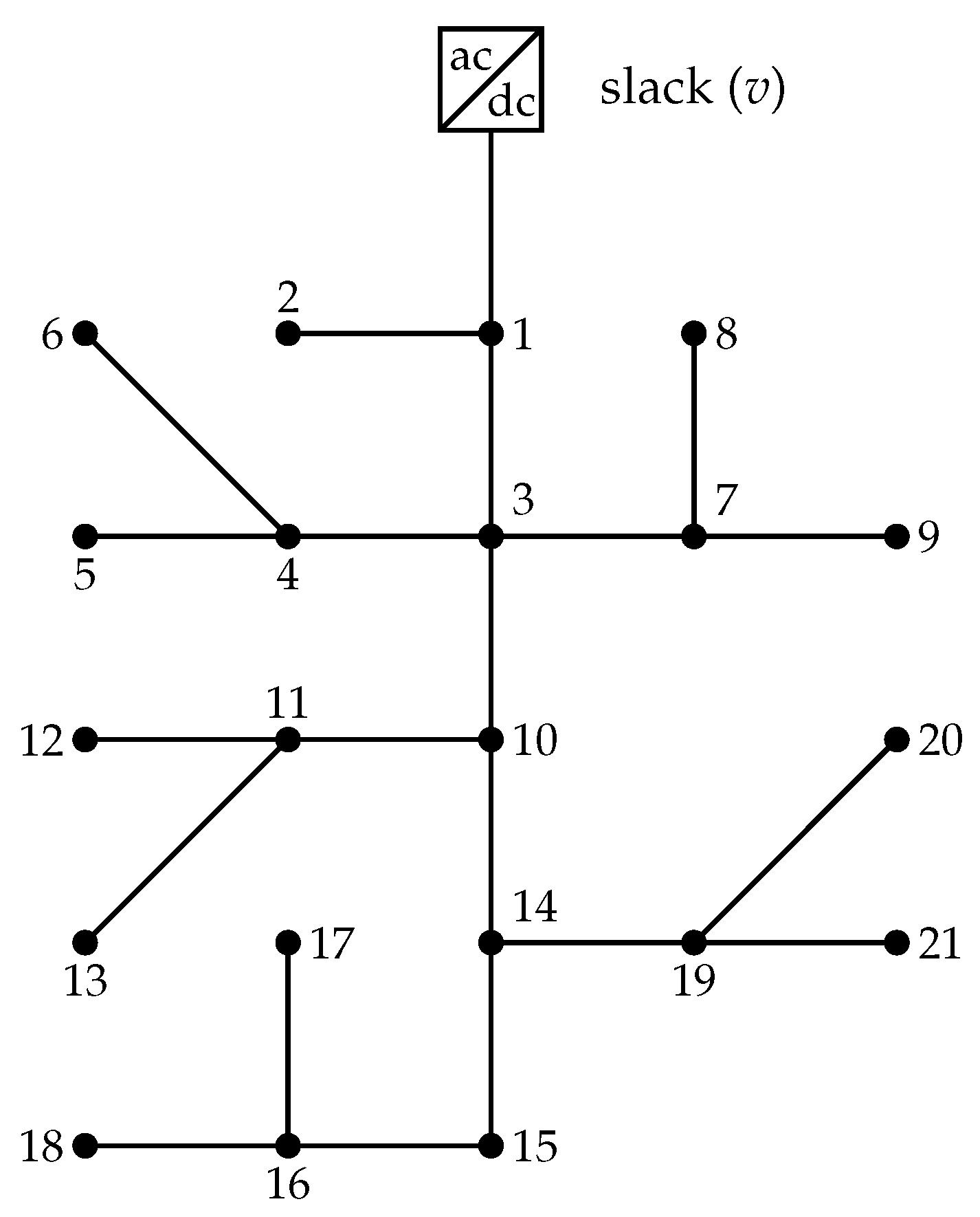
4.1. 21-Node Test Feeder
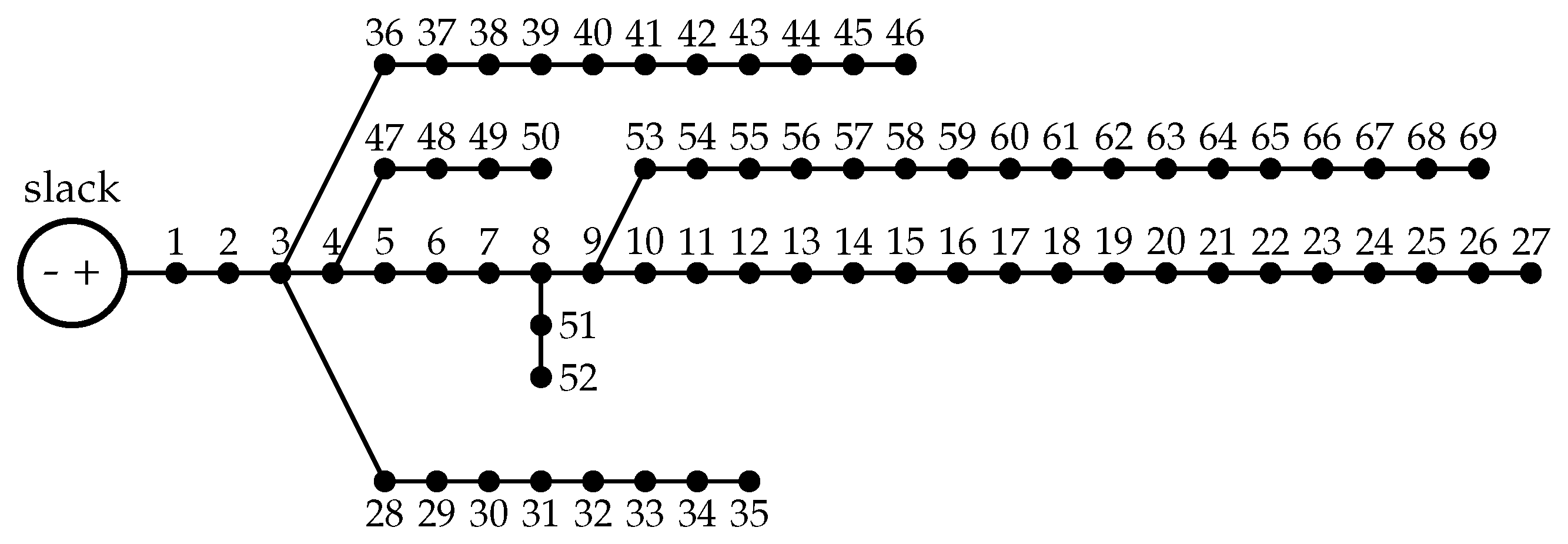
4.2. 69-Node Test Feeder
5. Computational Implementation
- 🗸
- Three distributed generators are available for installation in the DC test feeder; wherein, the case of the 21-node test system, their maximum individual allowed size is 1.5 pu and, in the case of the 69-node test feeder, this bound is 12 pu.
- 🗸
- The maximum power penetration in the 21-node test feeder is and, in the case of the 69-node test feeder, the maximum penetration is regarding the total power demand of each one of the DC networks.
5.1. 21-Node Test Feeder
- 🗸
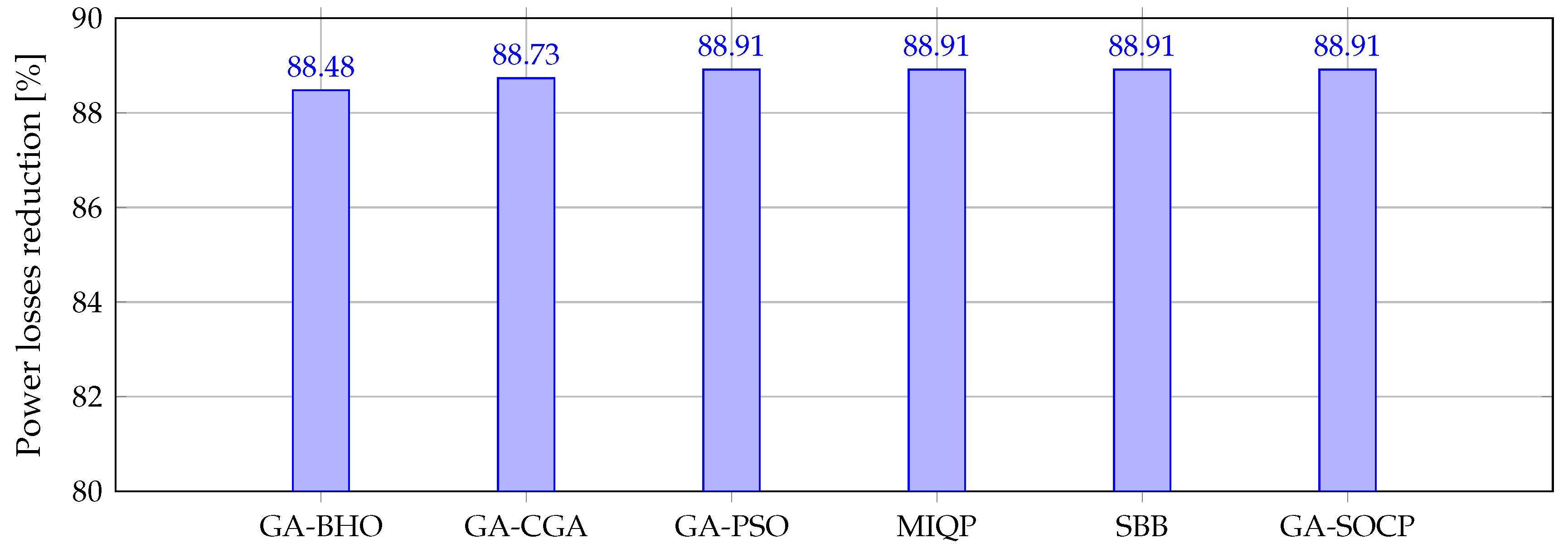
- All of the comparison methods, as well as the proposed approach, identifies the best optimal location in nodes 9, 12, and 16. However, due to the aleatory nature of the continuous metaheuristics (i.e., BHO, PSO, and CGA), both of them are stuck local optimums, and only the GA-PSO approach can deal with the global optimal solution.
- 🗸
- The mixed-integer quadratic programming (MIQP) model and the SBB solver (for the exact MINLP model) reach the global optimal solution with the lowest computational effort, which is attributable to the efficiency of the GAMS interface.
- 🗸
- The standard deviation of the proposed GA-SOCP programming is the lowest when compared with metaheuristics; this situation occurs because the proposed approach works with an exact optimization method based on second-order cone programming that has a unique solution for each combination of DGs provided by the GA in the master stage.
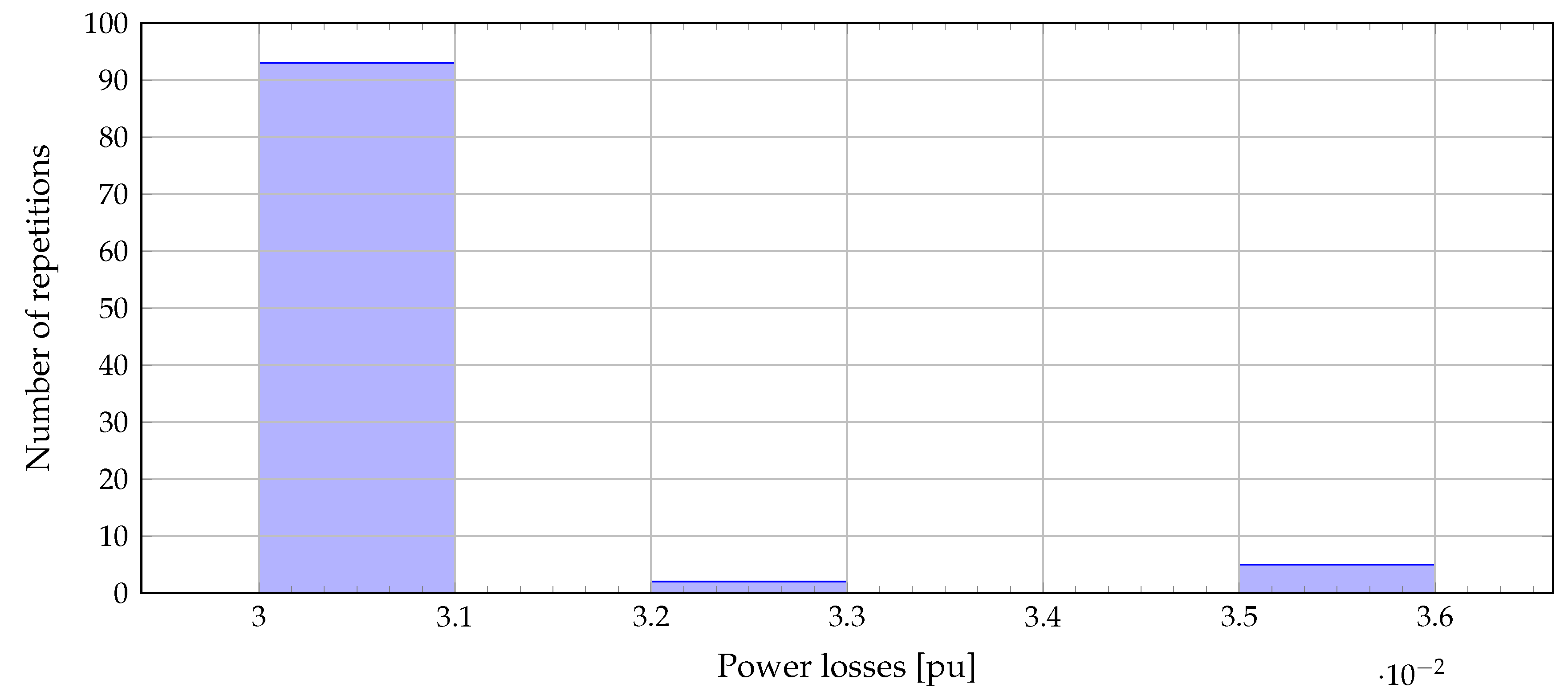
5.2. 69-Node Test Feeder
- 🗸
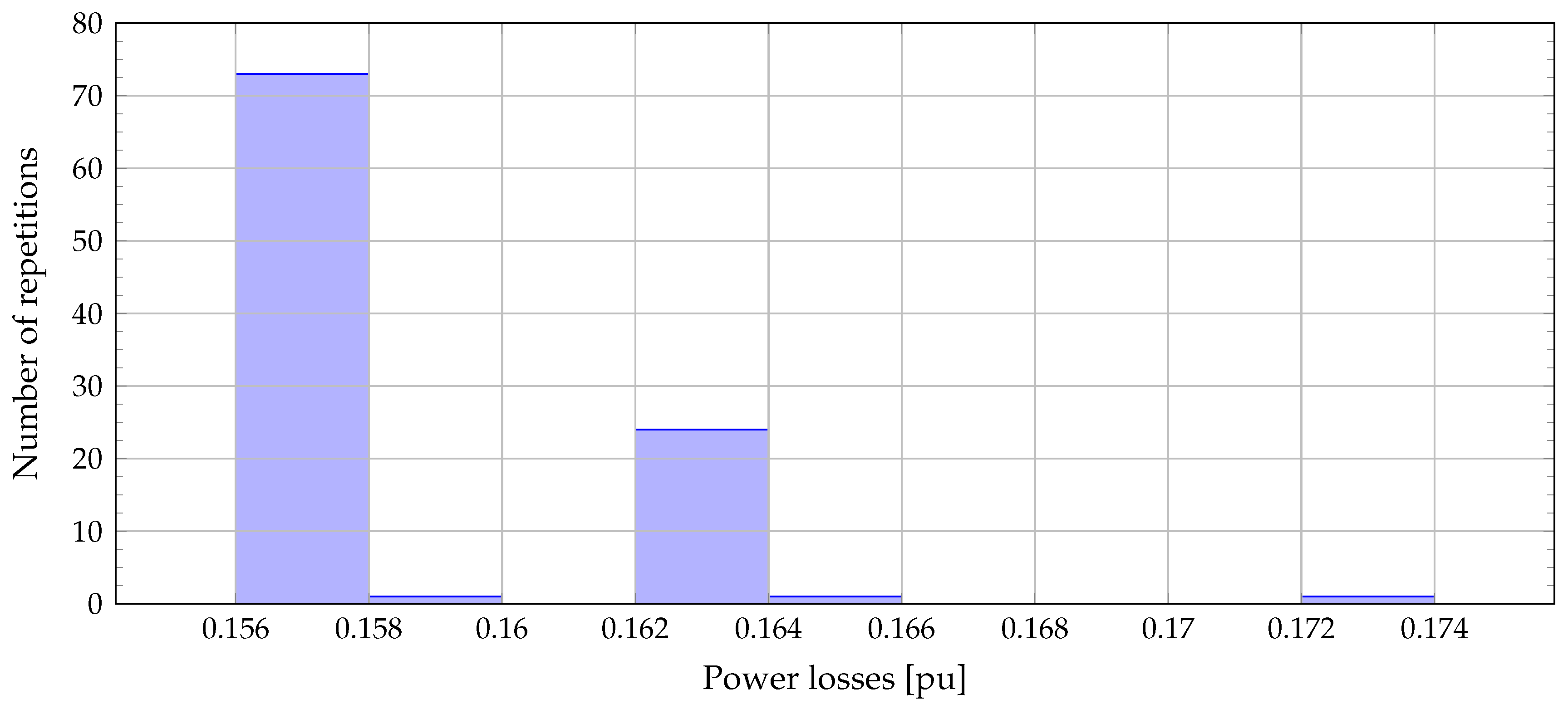
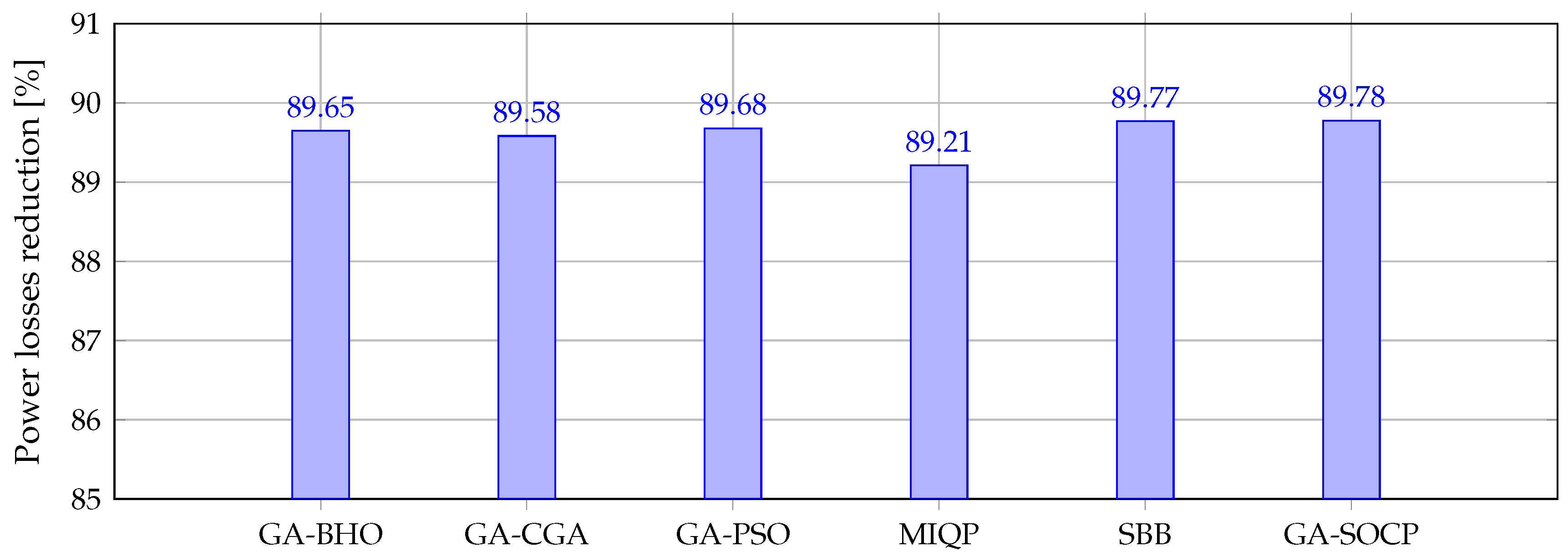
- All of the comparative methods are stuck in locally optimal solutions, including the MIQP approach and the MINLP model solved in GAMS through the SBB solver since these finds final power losses about pu and pu, respectively. However, the best optimal solution is reached by the GA-SOCP method with pu.
- 🗸
- Some of the metaheuristic approaches (i.e., GA-CGA and GA-PSO) find the best positions for installing the GDs being these nodes 21, 61, and 64; nevertheless, due to the random procedures in the slave stages, these find local solutions.
- 🗸
- Even if standard deviations of the GA-PSO and GA-CGA are lower than the proposed GA-SOCP, these values imply that these methods are always trapped in the local solutions, and they do not have the capacity of scape from these solutions to explore other promissory regions of the solution space.
5.3. General Commentaries
- 🗸
- The processing times in both test systems have been lower than 70 s, which implies that for planning purposes, our approach is perfectly applicable since, with a fraction of the time taken by the exhaustive search method, this can deal with the global optimal solution. In addition, the processing times of the comparative metaheuristic methods increase rapidly as a function of the test feeder size (see the last columns of Table 3 and Table 4) with the main disadvantage that due to the random behavior of the slave stages, i.e., BHO, CGA, and PSO, it is not possible to find the optimal solution of the studied optimization problem.
- 🗸
- The methodologies implemented in GAMS, i.e., the MIQP and the MINLP model, both solved with the SBB tool available in GAMS, have speedy processing times. However, the linearization of the power flow equations in the MIQP approach and the nonlinear and non-convex structure of the exact MINLP model make that these get stuck in optimal locations as the solution space grows.
- 🗸
- The main advantages of the proposed hybrid GA-SOCP master-slave optimization method are: (i) the possibility of using a compact codification with integer numbers (nodes) that allows for guaranteeing feasibility in all the stages of the genetic algorithm procedures, and (ii) the guarantee of the global optimal solution for each combination of distributed generators thanks to the second-order cone structure of the optimal power flow problem in the slave stage.
6. Conclusions and Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Acronyms | |
| AC | Alternating Current |
| DG | Distributed Generator |
| GA | Chu & Beasley genetic algorithm |
| HSM | Hyperplanes search method |
| NLP | Nonlinear Programming |
| CVX | Matlab Software for Disciplined Convex Programming |
| GAMS | General Algebraic Modeling System |
| MI | Mixed-integer |
| MINLP | Mixed-integer nonlinear programming |
| SOCP | Second-order cone programming |
| SDP | Semidefinite programming |
| Sets and subscripts | |
| Set of lines | |
| Set of nodes | |
| d | Demand |
| Distributed generator | |
| s | Slack node |
| i or j | Node |
| Parameters | |
| G | Conductance matrix |
| Component of the conductance matrix that relates nodes i and j | |
| Maximum number of distributed generators available | |
| Conductance between nodes k and m | |
| Power demanded by loads | |
| Power generated by generators | |
| Power generated by distributed source | |
| Integer part of the argument | |
| Random number | |
| Offsprings of population i in period t | |
| Variables | |
| Voltage profile at node i | |
| cross-product of voltage i with voltage j | |
| Population position k and m | |
| binary variable associate with the location at node i | |
| W | Population matrix |
| Control variables | |
| Power generated by conventional generator | |
| Power generated by renewable energies | |
| Power flow between nodes k and m | |
| Binary variable for location of DG | |
| Power generated vector by conventional generator | |
| Power generated vector by renewable energies | |
| Limits | |
| Maximum number of DG | |
| , | Minimum and maximum voltage profile |
| , | Minimum and maximum voltage profile squared |
| , | Minimum and maximum by conventional generator |
| , | Minimum and maximum by generated source |
| , | Minimum and maximum power flow between nodes k and m |
References
- Kwon, M.; Choi, S. Control scheme for autonomous and smooth mode switching of bidirectional DC–DC converters in a DC microgrid. IEEE Trans. Power Electron. 2017, 33, 7094–7104. [Google Scholar] [CrossRef]
- Garcés, A. Stability Analysis of DC-Microgrids: A Gradient Formulation. J. Control Autom. Electr. Syst. 2019, 30, 985–993. [Google Scholar] [CrossRef]
- Wang, L.; Wang, K.H.; Lee, W.J.; Chen, Z. Power-flow control and stability enhancement of four parallel-operated offshore wind farms using a line-commutated HVDC link. In Wind Energy Conversion Systems; Springer: Berlin/Heidelberg, Germany, 2012; pp. 385–414. [Google Scholar]
- Gavriluta, C.; Candela, I.; Citro, C.; Luna, A.; Rodriguez, P. Design considerations for primary control in multi-terminal VSC-HVDC grids. Electr. Power Syst. Res. 2015, 122, 33–41. [Google Scholar] [CrossRef]
- Simiyu, P.; Xin, A.; Wang, K.; Adwek, G.; Salman, S. Multiterminal Medium Voltage DC Distribution Network Hierarchical Control. Electronics 2020, 9, 506. [Google Scholar] [CrossRef]
- Justo, J.J.; Mwasilu, F.; Lee, J.; Jung, J.W. AC-microgrids versus DC-microgrids with distributed energy resources: A review. Renew. Sustain. Energy Rev. 2013, 24, 387–405. [Google Scholar] [CrossRef]
- Parhizi, S.; Lotfi, H.; Khodaei, A.; Bahramirad, S. State of the Art in Research on Microgrids: A Review. IEEE Access 2015, 3, 890–925. [Google Scholar] [CrossRef]
- Kumar, D.; Zare, F.; Ghosh, A. DC microgrid technology: System architectures, AC grid interfaces, grounding schemes, power quality, communication networks, applications, and standardizations aspects. IEEE Access 2017, 5, 12230–12256. [Google Scholar] [CrossRef]
- Lotfi, H.; Khodaei, A. AC versus DC microgrid planning. IEEE Trans. Smart Grid 2015, 8, 296–304. [Google Scholar] [CrossRef]
- Gelani, H.; Dastgeer, F.; Siraj, K.; Nasir, M.; Niazi, K.; Yang, Y. Efficiency Comparison of AC and DC Distribution Networks for Modern Residential Localities. Appl. Sci. 2019, 9, 582. [Google Scholar] [CrossRef]
- Rouzbehi, K.; Miranian, A.; Candela, J.I.; Luna, A.; Rodriguez, P. A Generalized Voltage Droop Strategy for Control of Multiterminal DC Grids. IEEE Trans. Ind. Appl. 2015, 51, 607–618. [Google Scholar] [CrossRef]
- Rouzbehi, K.; Miranian, A.; Luna, A.; Rodriguez, P. DC Voltage Control and Power Sharing in Multiterminal DC Grids Based on Optimal DC Power Flow and Voltage-Droop Strategy. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1171–1180. [Google Scholar] [CrossRef]
- Garcés, A. Convex Optimization for the Optimal Power Flow on DC Distribution Systems. In Handbook of Optimization in Electric Power Distribution Systems; Springer: Berlin/Heidelberg, Germany, 2020; pp. 121–137. [Google Scholar]
- Garcés, A. On the Convergence of Newton’s Method in Power Flow Studies for DC Microgrids. IEEE Trans. Power Syst. 2018, 33, 5770–5777. [Google Scholar] [CrossRef]
- Garces, A. Uniqueness of the power flow solutions in low voltage direct current grids. Electr. Power Syst. Res. 2017, 151, 149–153. [Google Scholar] [CrossRef]
- Hamad, A.A.; El-Saadany, E.F. Multi-agent supervisory control for optimal economic dispatch in DC microgrids. Sustain. Cities Soc. 2016, 27, 129–136. [Google Scholar] [CrossRef]
- Barabanov, N.; Ortega, R.; Griñó, R.; Polyak, B. On Existence and Stability of Equilibria of Linear Time-Invariant Systems With Constant Power Loads. IEEE Trans. Circuits Syst. I 2016, 63, 114–121. [Google Scholar] [CrossRef]
- Chauhan, R.K.; Chauhan, K.; Guerrero, J.M. Controller design and stability analysis of grid connected DC microgrid. J. Renew. Sustain. Energy 2018, 10, 035101. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Grisales-Noreña, L. Relaxed convex model for optimal location and sizing of DGs in DC grids using sequential quadratic programming and random hyperplane approaches. Int. J. Electr. Power Energy Syst. 2020, 115, 105442. [Google Scholar] [CrossRef]
- Grisales-Noreña, L.; Montoya, O.D.; Ramos-Paja, C.A. An energy management system for optimal operation of BSS in DC distributed generation environments based on a parallel PSO algorithm. J. Energy Storage 2020, 29, 101488. [Google Scholar] [CrossRef]
- Fantauzzi, M.; Lauria, D.; Mottola, F.; Scalfati, A. Sizing energy storage systems in DC networks: A general methodology based upon power losses minimization. Appl. Energy 2017, 187, 862–872. [Google Scholar] [CrossRef]
- Castillo-Calzadilla, T.; Macarulla, A.M.; Kamara-Esteban, O.; Borges, C.E. A case study comparison between photovoltaic and fossil generation based on direct current hybrid microgrids to power a service building. J. Clean. Prod. 2020, 244, 118870. [Google Scholar] [CrossRef]
- Chiodo, E.; Fantauzzi, M.; Lauria, D.; Mottola, F. A Probabilistic Approach for the Optimal Sizing of Storage Devices to Increase the Penetration of Plug-in Electric Vehicles in Direct Current Networks. Energies 2018, 11, 1238. [Google Scholar] [CrossRef]
- Montoya, O.D. A convex OPF approximation for selecting the best candidate nodes for optimal location of power sources on DC resistive networks. Eng. Sci. Technol. Int. J. 2020, 23, 527–533. [Google Scholar] [CrossRef]
- Montoya, O.D.; Garrido, V.M.; Grisales-Noreña, L.F.; Gil-González, W.; Garces, A.; Ramos-Paja, C.A. Optimal Location of DGs in DC Power Grids Using a MINLP Model Implemented in GAMS. In Proceedings of the 2018 IEEE 9th Power, Instrumentation and Measurement Meeting (EPIM), Salto, Uruguay, 14–16 November 2018; pp. 1–5. [Google Scholar]
- Montoya, O.D.; Grisales-Noreña, L.F.; Gil-González, W.; Alcalá, G.; Hernandez-Escobedo, Q. Optimal Location and Sizing of PV Sources in DC Networks for Minimizing Greenhouse Emissions in Diesel Generators. Symmetry 2020, 12, 322. [Google Scholar] [CrossRef]
- Grisales-Noreña, L.F.; Garzon-Rivera, O.D.; Montoya, O.D.; Ramos-Paja, C.A. Hybrid Metaheuristic Optimization Methods for Optimal Location and Sizing DGs in DC Networks. In Proceedings of the Workshop on Engineering Applications, Santa Marta, Colombia, 16–18 October 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 214–225. [Google Scholar]
- Huang, L.; Chen, Z.; Cui, Q.; Zhang, J.; Wang, H.; Shu, J. Optimal planning of renewable energy source and energy storage in a medium- and low-voltage distributed AC/DC system in China. J. Eng. 2019, 2019, 2354–2361. [Google Scholar] [CrossRef]
- Li, J.; Liu, F.; Wang, Z.; Low, S.H.; Mei, S. Optimal Power Flow in Stand-Alone DC Microgrids. IEEE Trans. Power Syst. 2018, 33, 5496–5506. [Google Scholar] [CrossRef]
- Benson, H.Y.; Sağlam, Ü. Mixed-Integer Second-Order Cone Programming: A Survey. In Theory Driven by Influential Applications; INFORMS: Catonsville, MD, USA, 2013; pp. 13–36. [Google Scholar] [CrossRef]
- Li, Q.; Vittal, V. Convex Hull of the Quadratic Branch AC Power Flow Equations and Its Application in Radial Distribution Networks. IEEE Trans. Power Syst. 2018, 33, 839–850. [Google Scholar] [CrossRef]
- Farivar, M.; Low, S.H. Branch Flow Model: Relaxations and Convexification-Part I. IEEE Trans. Power Syst. 2013, 28, 2554–2564. [Google Scholar] [CrossRef]
- Lambora, A.; Gupta, K.; Chopra, K. Genetic Algorithm- A Literature Review. In Proceedings of the 2019 International Conference on Machine Learning, Big Data, Cloud and Parallel Computing (COMITCon), Faridabad, India, 14–16 February 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Orozco-Henao, C. Vortex search and Chu-Beasley genetic algorithms for optimal location and sizing of distributed generators in distribution networks: A novel hybrid approach. Eng. Sci. Technol. Int. J. 2020. [Google Scholar] [CrossRef]
- Sahin, O.; Akay, B. Comparisons of metaheuristic algorithms and fitness functions on software test data generation. Appl. Soft Comput. 2016, 49, 1202–1214. [Google Scholar] [CrossRef]
- Badem, H.; Basturk, A.; Caliskan, A.; Yuksel, M.E. A new hybrid optimization method combining artificial bee colony and limited-memory BFGS algorithms for efficient numerical optimization. Appl. Soft Comput. 2018, 70, 826–844. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W. A MIQP model for optimal location and sizing of dispatchable DGs in DC networks. Energy Syst. 2020, 1–22. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node i | Node j | [p.u] | [p.u] | Node i | Node j | [p.u] | [p.u] |
|---|---|---|---|---|---|---|---|
| 1 | 2 | 0.0053 | 0.70 | 11 | 12 | 0.0079 | 0.68 |
| 1 | 3 | 0.0054 | 0.00 | 11 | 13 | 0.0078 | 0.10 |
| 3 | 4 | 0.0054 | 0.36 | 10 | 14 | 0.0083 | 0.00 |
| 4 | 5 | 0.0063 | 0.04 | 14 | 15 | 0.0065 | 0.22 |
| 4 | 6 | 0.0051 | 0.36 | 15 | 16 | 0.0064 | 0.23 |
| 3 | 7 | 0.0037 | 0.00 | 16 | 17 | 0.0074 | 0.43 |
| 7 | 8 | 0.0079 | 0.32 | 16 | 18 | 0.0081 | 0.34 |
| 7 | 9 | 0.0072 | 0.80 | 14 | 19 | 0.0078 | 0.09 |
| 3 | 10 | 0.0053 | 0.00 | 19 | 20 | 0.0084 | 0.21 |
| 10 | 11 | 0.0038 | 0.45 | 19 | 21 | 0.0082 | 0.21 |
| Node i | Node j | [] | [kW] | Node i | Node j | [] | [kW] |
|---|---|---|---|---|---|---|---|
| 1 | 2 | 0.0005 | 0 | 3 | 36 | 0.0044 | 26 |
| 2 | 3 | 0.0005 | 0 | 36 | 37 | 0.0640 | 26 |
| 3 | 4 | 0.0015 | 0 | 37 | 38 | 0.1053 | 0 |
| 4 | 5 | 0.0215 | 0 | 38 | 39 | 0.0304 | 24 |
| 5 | 6 | 0.3660 | 2.6 | 39 | 40 | 0.0018 | 24 |
| 6 | 7 | 0.3810 | 40.4 | 40 | 41 | 0.7283 | 102 |
| 7 | 8 | 0.0922 | 75 | 41 | 42 | 0.3100 | 0 |
| 8 | 9 | 0.0493 | 30 | 42 | 43 | 0.0410 | 6 |
| 9 | 10 | 0.8190 | 28 | 43 | 44 | 0.0092 | 0 |
| 10 | 11 | 0.1872 | 145 | 44 | 45 | 0.1089 | 39.22 |
| 11 | 12 | 0.7114 | 145 | 45 | 46 | 0.0009 | 39.22 |
| 12 | 13 | 1.0300 | 8 | 4 | 47 | 0.0034 | 0 |
| 13 | 14 | 1.0440 | 8 | 47 | 48 | 0.0851 | 79 |
| 14 | 15 | 1.0580 | 0 | 48 | 49 | 0.2898 | 384.7 |
| 15 | 16 | 0.1966 | 45 | 49 | 50 | 0.0822 | 384.7 |
| 16 | 17 | 0.3744 | 60 | 8 | 51 | 0.0928 | 40.5 |
| 17 | 18 | 0.0047 | 60 | 51 | 52 | 0.3319 | 3.6 |
| 18 | 19 | 0.3276 | 0 | 9 | 53 | 0.1740 | 4.35 |
| 19 | 20 | 0.2106 | 1 | 53 | 54 | 0.2030 | 26.4 |
| 20 | 21 | 0.3416 | 114 | 54 | 55 | 0.2842 | 24 |
| 21 | 22 | 0.0140 | 5 | 55 | 56 | 0.2813 | 0 |
| 22 | 23 | 0.1591 | 0 | 56 | 57 | 1.5900 | 0 |
| 23 | 24 | 0.3463 | 28 | 57 | 58 | 0.7837 | 0 |
| 24 | 25 | 0.7488 | 0 | 58 | 59 | 0.3042 | 100 |
| 25 | 26 | 0.3089 | 14 | 59 | 60 | 0.3861 | 0 |
| 26 | 27 | 0.1732 | 14 | 60 | 61 | 0.5075 | 1244 |
| 3 | 28 | 0.0044 | 26 | 61 | 62 | 0.0974 | 32 |
| 28 | 29 | 0.0640 | 26 | 62 | 63 | 0.1450 | 0 |
| 29 | 30 | 0.3978 | 0 | 63 | 64 | 0.7105 | 227 |
| 30 | 31 | 0.0702 | 0 | 64 | 65 | 1.0410 | 59 |
| 31 | 32 | 0.3510 | 0 | 65 | 66 | 0.2012 | 18 |
| 32 | 33 | 0.8390 | 10 | 66 | 67 | 0.0047 | 18 |
| 33 | 34 | 1.7080 | 14 | 67 | 68 | 0.7394 | 28 |
| 34 | 35 | 1.4740 | 4 | 68 | 69 | 0.0047 | 28 |
| Method | Nodes | [p.u.] | [p.u.] | min [p.u.] | [s] |
|---|---|---|---|---|---|
| GA-BHO | {9,12,16} | 2.2761 × 10−03 | 0.0368 | 0.0318 | 111.9440 |
| GA-CGA | {9,12,16} | 1.3537 × 10−03 | 0.0329 | 0.0311 | 33.1974 |
| GA-PSO | {9,12,16} | 1.8437 × 10−03 | 0.0319 | 0.0306 | 58.0934 |
| MIQP | {9,12,16} | 0.0306 | 0.0306 | 8.9688 | |
| SSB | {9,12,16} | 0.0306 | 0.0306 | 5.3653 | |
| GA-SOCP | {9,12,16} | 1.1050 × 10−03 | 0.0309 | 0.0306 | 52.146 |
| Method | Nodes | [p.u.] | [p.u.] | min [p.u.] | [s] |
|---|---|---|---|---|---|
| GA-BHO | {23,61,67} | 2.5207 × 10−03 | 0.1633 | 0.1593 | 713.7193 |
| GA-CGA | {21,61,64} | 3.4801 × 10−04 | 0.1648 | 0.1603 | 218.0169 |
| GA-PSO | {21,61,64} | 5.4023 × 10−04 | 0.1689 | 0.1588 | 378.4731 |
| MIQP | {22,61,64} | 0.1660 | 0.1660 | 24.1868 | |
| SBB | {22,61,65} | 0.1574 | 0.1574 | 12.4270 | |
| GA-SOCP | {21,61,64} | 3.1295 × 10−03 | 0.1591 | 0.1573 | 66.9100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montoya, O.D.; Gil-González, W.; Grisales-Noreña, L.F. Hybrid GA-SOCP Approach for Placement and Sizing of Distributed Generators in DC Networks. Appl. Sci. 2020, 10, 8616. https://doi.org/10.3390/app10238616
Montoya OD, Gil-González W, Grisales-Noreña LF. Hybrid GA-SOCP Approach for Placement and Sizing of Distributed Generators in DC Networks. Applied Sciences. 2020; 10(23):8616. https://doi.org/10.3390/app10238616
Chicago/Turabian StyleMontoya, Oscar Danilo, Walter Gil-González, and Luis Fernando Grisales-Noreña. 2020. "Hybrid GA-SOCP Approach for Placement and Sizing of Distributed Generators in DC Networks" Applied Sciences 10, no. 23: 8616. https://doi.org/10.3390/app10238616
APA StyleMontoya, O. D., Gil-González, W., & Grisales-Noreña, L. F. (2020). Hybrid GA-SOCP Approach for Placement and Sizing of Distributed Generators in DC Networks. Applied Sciences, 10(23), 8616. https://doi.org/10.3390/app10238616