Automatic Fabric Defect Detection Method Using PRAN-Net


Abstract
1. Introduction
2. PRAN-Net Fabric Defect Detection Method Based on Faster R-CNN
2.1. Feature Extraction Based on Multi-Scales Feature Maps
2.2. Priori Anchor Generation
2.2.1. Location Prediction
2.2.2. Shape Prediction
2.3. Defect Classification Network
3. Experiment and Results
3.1. Experimental Datasets
3.1.1. The Plain Fabric Dataset
3.1.2. The Denim Dataset
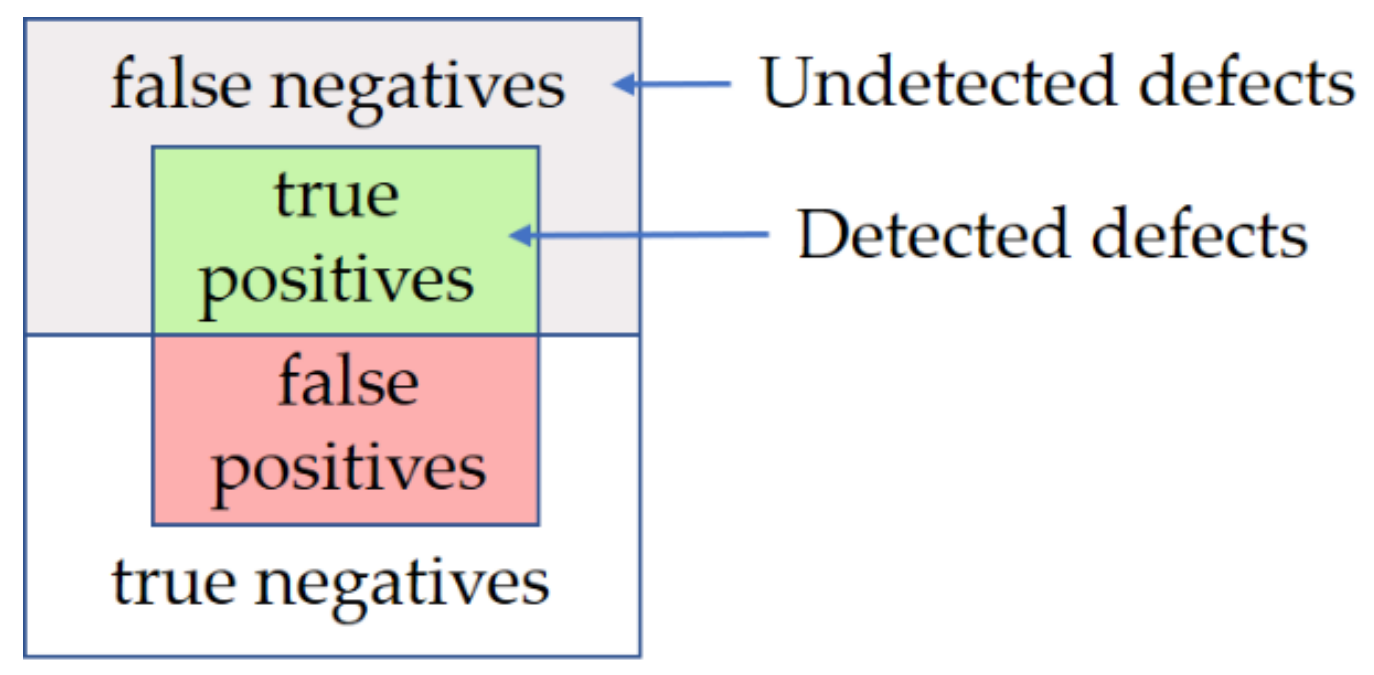
3.2. Defect Detection Evaluation Metrics
3.3. Experimental Settings
3.4. Detection Results
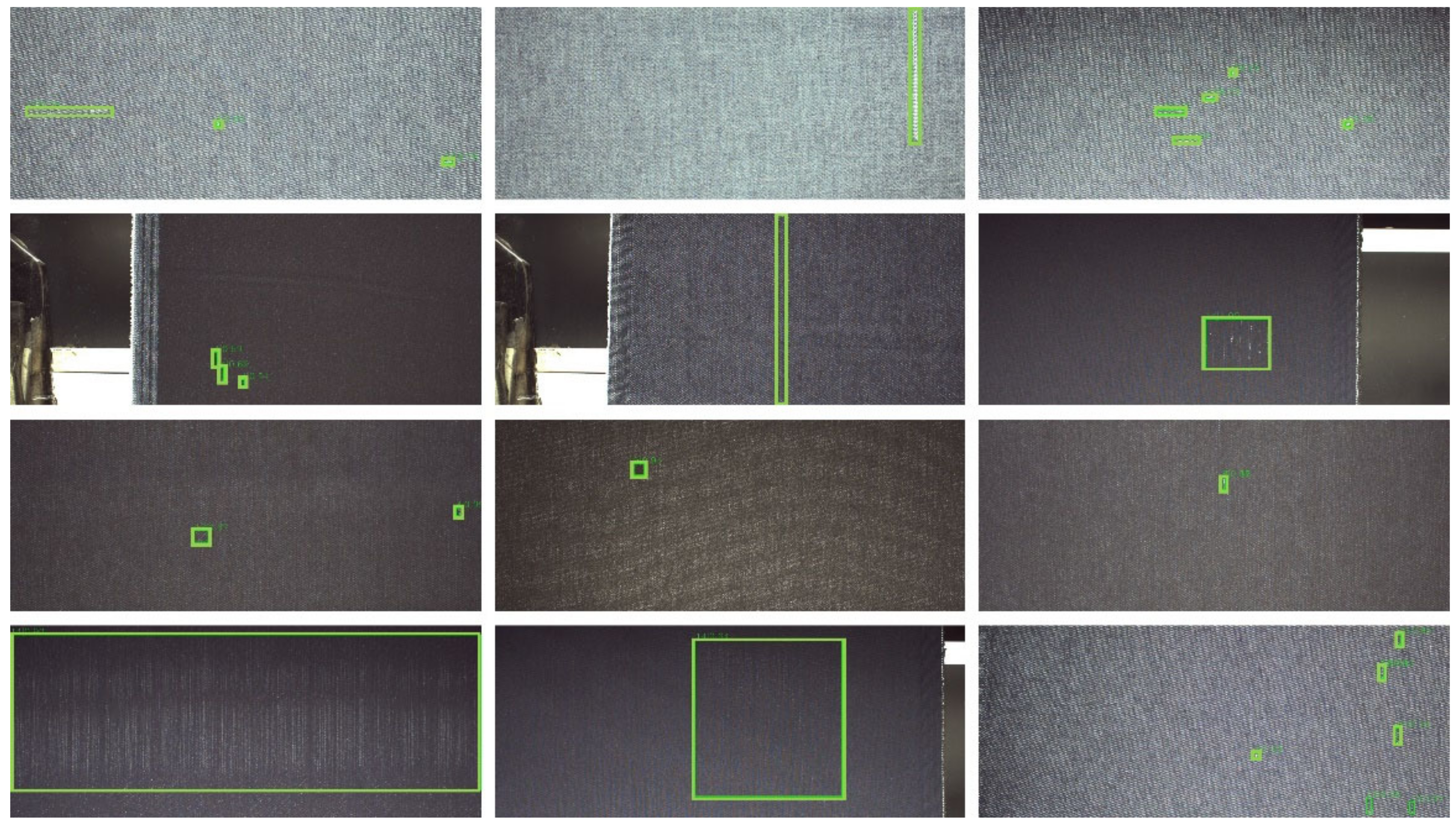
3.4.1. Detection Results of the Denim Dataset
3.4.2. Detection Results of the Plain Fabric Dataset
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sari-Sarra, H.; Goddard, J.S. Vision system for on-loom fabric inspection. IEEE Trans. Ind. Appl. 1999, 35, 1252–1259. [Google Scholar] [CrossRef]
- Dorrity, J.L.; Vachtsevanos, G. On-line defect detection for weaving systems. In Proceedings of the 1996 IEEE Annual Textile, Fiber and Film Industry Technical Conference, Atlanta, GA, USA, 15–16 May 1996; p. 6. [Google Scholar] [CrossRef]
- Chan, C.H.; Pang, G.K.H. Fabric defect detection by Fourier analysis. IEEE Trans. Ind. Appl. 2000, 36, 1267–1276. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision—ECCV 2016; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar] [CrossRef]
- Lin, T.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2999–3007. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. Available online: https://arxiv.org/abs/1804.02767 (accessed on 8 April 2018).
- Bochkovskiy, A.; Wang, C.; Liao, H.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. In Proceedings of the Conference on Computer Vision and Pattern Recognition (CVPR), USA, 16–18 June 2020. Virtual Online Meeting. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-FCN: Object Detection via Region-based Fully Convolutional Networks. In Advances in Neural Information Processing Systems 29; Curran Associates Inc.: Long Beach, CA, USA, 2016; pp. 379–387. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar] [CrossRef]
- Cai, Z.; Vasconcelos, N. Cascade R-CNN: Delving Into High Quality Object Detection. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6154–6162. [Google Scholar]
- Hu, Y.; Shan, Z.; Gao, F. Ship Detection Based on Faster-RCNN and Multiresolution SAR. Radio Eng. 2018, 48, 96–100. [Google Scholar]
- Jain, P.K.; Gupta, S.; Bhavsar, A.; Nigam, A.; Sharma, N. Localization of common carotid artery transverse section in B-mode ultrasound images using faster RCNN: A deep learning approach. Med. Biol. Eng. Comput. 2020, 58, 471–482. [Google Scholar] [CrossRef] [PubMed]
- Rosati, R.; Romeo, L.; Silvestri, S.; Marcheggiani, F.; Tiano, L.; Frontoni, E. Faster R-CNN approach for detection and quantification of DNA damage in comet assay images. Comput. Biol. Med. 2020, 123, 103912. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Wang, C.; Su, H.; Du, B.; Tao, D. Multistage GAN for Fabric Defect Detection. IEEE Trans. Image Process. 2019, 29, 3388–3400. [Google Scholar] [CrossRef] [PubMed]
- Jing, J.; Ma, H.; Zhang, H. Automatic fabric defect detection using a deep convolutional neural network. Color. Technol. 2019, 135, 213–223. [Google Scholar] [CrossRef]
- Jing, J.; Zhuo, D.; Zhang, H.; Liang, Y.; Zheng, M. Fabric defect detection using the improved YOLOv3 model. J. Eng. Fibers Fabr. 2020, 15. [Google Scholar] [CrossRef]
- Lin, T.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar] [CrossRef]
- Zhou, X.Y.; Wang, D.; Krhenbühl, P. Objects as Points. arXiv 2019, arXiv:1904.07850v1. Available online: https://arxiv.org/abs/1904.07850v1 (accessed on 16 April 2020).
- Wang, J.; Chen, K.; Yang, S.; Loy, C.C.; Lin, D. Region Proposal by Guided Anchoring. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 2960–2969. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Li, B.Y.; Liu, Y.; Wang, X. Gradient Harmonized Single-stage Detector. arXiv 2018, arXiv:1811.05181v1. [Google Scholar] [CrossRef]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Oil Stains | Coarse Warp | Long Coarse Weft | Short Coarse Weft | Mispick | Total | |
|---|---|---|---|---|---|---|---|
| Number of defects | Train | 39 | 145 | 252 | 304 | 25 | 765 |
| Validation | 9 | 36 | 62 | 76 | 6 | 189 | |
| Test | 16 | 32 | 64 | 87 | 11 | 210 | |
| Total | 64 | 213 | 378 | 467 | 42 | 1164 | |
| Category | File | Stains | Difficult | Nep | Broken Warp | Light Warp | Looped Weft | |
|---|---|---|---|---|---|---|---|---|
| Defect Class Id | 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
| Number of defects | Train | 247 | 265 | 246 | 133 | 191 | 104 | 317 |
| Validation | 61 | 66 | 61 | 33 | 47 | 26 | 79 | |
| Test | 53 | 70 | 59 | 29 | 46 | 30 | 56 | |
| Total | 361 | 401 | 361 | 195 | 284 | 160 | 452 | |
| Category | Star Jump | Coarse Pick | Mispick | Starch Lump | Warp Knot | Broken Spandex | Knot | |
| Defect Class Id | 8 | 9 | 10 | 11 | 12 | 13 | 14 | |
| Number of defects | Train | 221 | 656 | 112 | 243 | 323 | 366 | 1379 |
| Validation | 55 | 164 | 27 | 60 | 80 | 91 | 344 | |
| Test | 26 | 95 | 22 | 31 | 67 | 89 | 273 | |
| Total | 302 | 915 | 161 | 336 | 473 | 546 | 1996 | |
| Category Name | Flower Jump | Coarse Warp | Loose Warp | Mark | Three Wire | Hole | Total | |
| Defect Class Id | 15 | 16 | 17 | 18 | 19 | 20 | ||
| Number of defects | Train | 96 | 143 | 267 | 324 | 698 | 196 | 6527 |
| Validation | 23 | 35 | 66 | 81 | 174 | 48 | 1621 | |
| Test | 15 | 35 | 63 | 65 | 183 | 68 | 1375 | |
| Total | 134 | 213 | 396 | 470 | 1055 | 312 | 9523 | |
| Method | The Denim Dataset | ||||
|---|---|---|---|---|---|
| ACC (%) | mAP (%) | AR (%) | IoUs (%) | FPS (f/s) | |
| RetinaNet | 84.7 | 53.7 | 46.7 | 63.8 | 10.2 |
| Mask R-CNN | 89.4 | 58.4 | 51 | 69.8 | 0.3 |
| GA-Faster R-CNN | 87.1 | 60.2 | 50.9 | 71.4 | 7.2 |
| PRAN-Net | 91.9 | 62.3 | 53.3 | 72.9 | 9.7 |
| Method | The Plain Fabric Dataset | ||||
|---|---|---|---|---|---|
| ACC (%) | mAP (%) | AR (%) | IoUs (%) | FPS (f/s) | |
| RetinaNet | 91.2 | 83.7 | 53.6 | 88.7 | 26.1 |
| Mask R-CNN | 96.4 | 90.1 | 66.6 | 93.1 | 0.8 |
| GA-Faster R-CNN | 94.7 | 88.4 | 63.1 | 91.4 | 20.3 |
| PRAN-Net | 98.6 | 92.5 | 70.0 | 95.8 | 25.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, P.; Wang, Y.; Hao, C.; Zhu, Z.; Liu, T.; Zhou, W. Automatic Fabric Defect Detection Method Using PRAN-Net. Appl. Sci. 2020, 10, 8434. https://doi.org/10.3390/app10238434
Peng P, Wang Y, Hao C, Zhu Z, Liu T, Zhou W. Automatic Fabric Defect Detection Method Using PRAN-Net. Applied Sciences. 2020; 10(23):8434. https://doi.org/10.3390/app10238434
Chicago/Turabian StylePeng, Peiran, Ying Wang, Can Hao, Zhizhong Zhu, Tong Liu, and Weihu Zhou. 2020. "Automatic Fabric Defect Detection Method Using PRAN-Net" Applied Sciences 10, no. 23: 8434. https://doi.org/10.3390/app10238434
APA StylePeng, P., Wang, Y., Hao, C., Zhu, Z., Liu, T., & Zhou, W. (2020). Automatic Fabric Defect Detection Method Using PRAN-Net. Applied Sciences, 10(23), 8434. https://doi.org/10.3390/app10238434