A Comprehensive Motivation of Multilayer Control Levels for Microgrids: Synchronization, Voltage and Frequency Restoration Perspective

 ,
,  ,
,
Abstract
1. Introduction
Contributions and Paper Organization
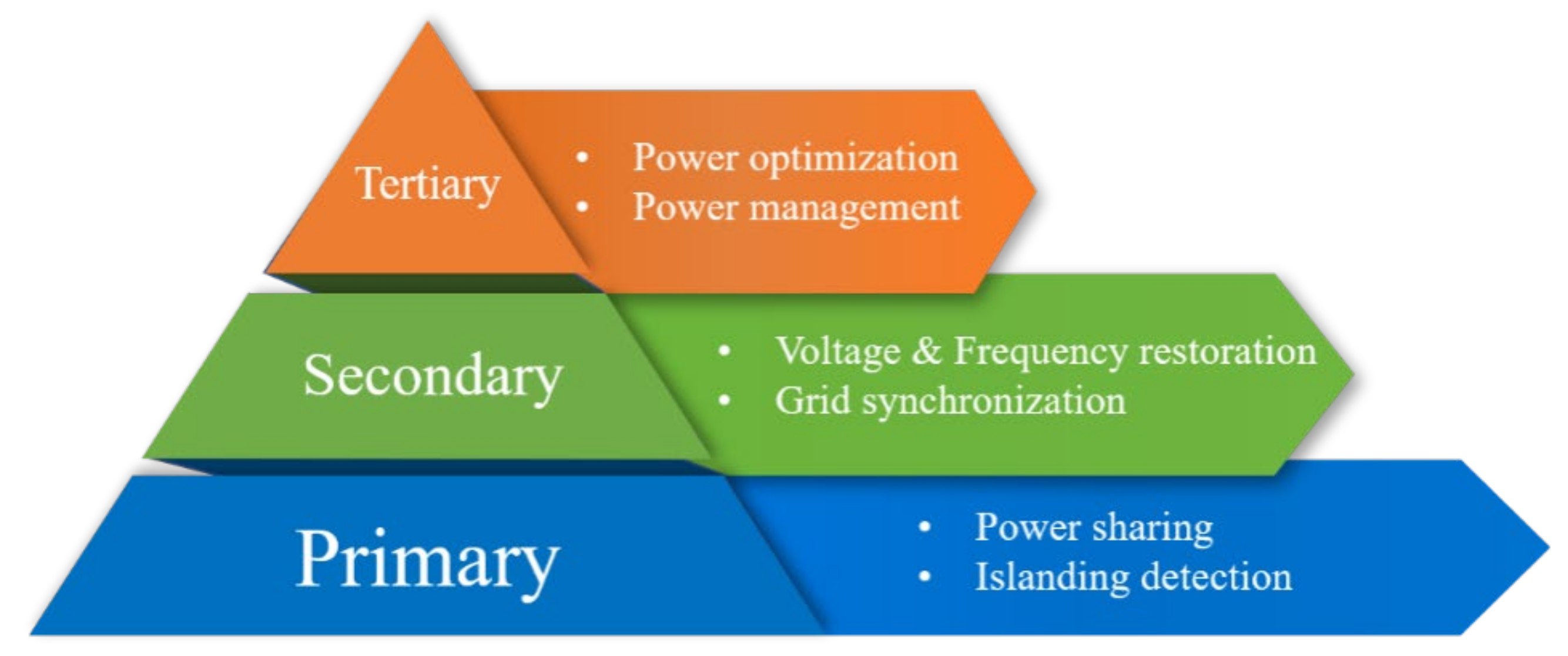
2. Microgrid Hierarchical Control Group
2.1. Primary Control
2.2. Secondary Control
2.3. Tertiary Control
3. Hierarchical State-of-the-Art Control
3.1. Overview of the Inner-Loop Control Methods
- Proportional Integral (PI): The PI method is the most applied over the years to serve different purposes and is practically employed with the synchronous reference frame associated with dc variables. It delivers numerous benefits, such as less complicated controller designs, applicability in linear time-invariant systems, practicability for the single-input-single-output (SISO) system, etc. For instance, [40] discusses the effects of the fractional order of the PI method for load-sharing revamping, and the same method is proposed in [41] and [42] in their respective applications. The PI controller does not solely correspond on the dc variables but also on the sinusoidal variables. As mentioned in [43], the PI current controller integrators associate with the stationary frame under undesirable and distorted operating conditions. It offers low computational burden with zero steady-state error for current harmonics concerns.
- Proportional resonant (PR): A viable alternative to the synchronous frame PI controllers is the stationary frame PR compensators [44]. The PR controller is often interpreted as a sinusoidal controller as it is widely associated with the stationary reference frame (αβ) as well as the natural reference frame (abc) due to its capability of forcing errors to be zero and for its harmonics compensation [45,46]. Similar methods are proposed in [47] for the distributed power generation systems (DPGS). Studies demonstrate that resonant controllers are an adequate option for inner current control loops to show anticipated performances. It has a high gain around the natural resonant frequency, ω [48], as it is able to introduce a low-order harmonics compensator to improve the current controller. It offers no excessive computational resources, fast transient performance, and the capability of zero steady-state error at the AC frequency, among others.
- Dead-beat control (DB): Among discrete-time linear controls, dead-beat is the most commonly employed due to its fast transient response in different applications, which makes it a suitable approach for current regulation. The DB control is able to place all the closed-loop poles at zero [49]; thus, the tracking error settles to zero within a few sampling steps equivalent to the SISO systems. Worth mentioning, the DB control is in the predictive family, which forecasts the effect of the control action by tracking the current reference accurately without any error. Some in literature have proposed methods to improve the conventional DB controller’s limitations, such as being vulnerable to model uncertainties, sensitive to model and parameter mismatch, etc. For instance, [50,51] employ an adaptive self-tuning for the pulse-width modulated (PWM) converter by adopting a delay compensation caused by voltage calculation, synchronous frame rotation, and the PWM converter itself in order to be homogeneously relocated outside the closed-loop control system, thus compensating for their effects on the closed loop’s stability. The implementation of the current controller with a higher degree of disturbance rejection enables swift current tracking with higher bandwidth qualities. In [52], the study uses a combination of a DB controller with neural-network identification to present nonlinear estimation problems and to operate as a grid voltage estimator to realize a grid voltage sensorless scheme to guarantee high-quality power injection. However, while the DB controller provides robustness in its performance, its implementation leads to a suffocated control structure.
- Hysteresis control (H): In the hysteresis approach, the designed controller has to be attached to an adaptive band to achieve fixed switching frequency. The output is the state of the switches that offers variable switching frequency. Worth mentioning, the hysteresis approach is allocated to the predictive control group. Numerous techniques and algorithms to achieve fixed switching frequency are presented in the literature [53,54,55,56]. In [57], a hysteresis current regulator is applied for the neutral-point clamped inverter as well as the flying capacitor three-phase inverter, where the measured switched phase-leg voltages are adjusted to the phase leg according to the switching frequency. The hysteresis current regulator is distinguished for its robustness against load variations, for exhibiting high-speed transient performance, and for its simple implementations. Despite the several advantages of the hysteresis controller, it still has drawbacks, such as the high switching frequencies in the inverter due to being interphase-based.
- Predictive control (P): Predictive control is a sophisticated control process satisfying a set of constraints. It uses the system model to forecast the future behavior of the controlled variables. In such a way, it can accurately track the reference current while minimizing the forecasting error within zero error. The model predictive power control (MPPC) and voltage control (MPVC) are proposed in [58]. These schemes can ensure stable DC-bus voltages of BESS as well as a stable AC-bus voltage output and a decent power sharing. Both control schemes provide a simpler control algorithm and better performance. However, the predictive control is prone to network variations. Therefore, in [59], a robust disturbance observer for model predictive control has been proposed for a grid-connected inverter to regulate the current output. The observer is designed to estimate the lumped disturbances (model uncertainties and grid voltage disturbances). An improvement in the reference error tracking is made in [60] by applying an adaptive reference model predictive control to track virtual references rather than actual references. A flexibly modeled virtual multi-input-multi-output (MIMO) generates the error and thus no tuning process is required for different operating points. A seamless transition of mode operations of VSI is presented in [61] through predictive detection and the estimation of control algorithm. It can be achieved through the cost function, thus simplifying the controller’s algorithm. The advantage of predictive control design-wise is that it can be implemented more simply depending on the applications. Despite the simple implementation, some predictive controls can be more complicated.
- Sliding mode control (SMC): This control is recognizable by having a robust performance and a fast response time in the variability of system parameters over sizeable operating points [62]. The controller takes vigorous actions if the plant experiences deviations from its average operating point [63]. In such a way, the desired dynamics can be ensured through an essential selection of desired dynamics and control law. However, SMC’s performance significantly deteriorates due to the chattering phenomenon in discrete implementation. Therefore, the enhancement of SMC has been made through the output ripple optimization. The works in [24,64] have shown that SMC is employed in the secondary control scheme and is used in both frequency and voltage regulators to enhance power sharing performance and battery charging scheme. SMC shows reliable performance during transients and has better disturbance rejection and low sensitivity to parameter value changes.
- H-infinity control (H∞): The primary task of the H∞ controller is to inject a pure sinusoidal current to the main network in both linear and nonlinear loads even during grid voltage distortions. Reducing the disturbance effect and computation delay is vital to avoid instability in the system caused by the digital control delay. Therefore, active damping is presented in [65] by applying a capacitor current feedback into the controller design process. It not only increases the tracking efficiency but also is able to reduce the harmonic noise in current output. In [66], the study distinguishes the performance of reference signal tracking by showing a minimal number of errors. It is capable of adjusting to the system voltage and frequency equivalent to their nominal values after system load variations. As a result, the H∞ scheme offers a robust dynamic performance even in model uncertainties and unbalanced conditions, reduces tracking error, and has an easy implementation.
3.2. Power Sharing for Primary Control
3.2.1. Droop-Based Control
- Virtual output impedance (VI): VI is widely applied to advance the power sharing capability and stability of the system under line mismatch. The inverter output impedance would be in resistive and inductive behaviors. The conventional droop approach in large power systems is entirely operating in inductive line impedance. However, when applied in power electronics, the output impedance relies upon the control strategy used by the inner control loop. In [78], the study demonstrates a robust performance of the inverter with resistive output impedance against numerical errors, disturbances, feeder impedance and parameter mismatch by compensating the voltage drop at the load effect and the droop effect itself. As for inductive impedance [79], adaptive droop control is achieved through a self-adjusted VI to provide the decoupling of active and reactive powers, thus guaranteeing accurate power sharing as well as reliable voltage assistance throughout the voltage compensator. A single line-current feedforward control at the voltage reference is widely applied in the conventional VI approach. An enhancement method is presented in [80] to provide VI at both the fundamental and harmonic frequencies by controlling via the DG current loop and the feedforward PCC voltage, respectively. Thus, VI compensates the impacts of the mismatched in the physical feeder impedances and simultaneously achieves precise adjustment of the DG unit’s corresponding impedance at both fundamental and selected harmonic frequencies. An adaptive VI proposed in [81] relies upon an extra small injection of AC signal in the output voltage of the parallel inverter to significantly highlight the unbalanced and harmonic power sharing problems caused by the feeder impedance mismatch. Whereas in [82], an adaptive VI is used for accurate reactive power sharing in an islanded microgrid. The compensation of voltage drop mismatch across the feeders is counteracted by employing communication to facilitate the tuning. In [83], the distributed adaptive VI is employed to suppress large circulating currents caused by the slight differences in both magnitudes and phases in the output voltage of the DG units.
- Adaptive droop (AD): The current paradigm in autonomous power sharing is by utilizing the voltage deviation in multi-terminal DC (MTDC) grids. The regulation of voltage deviation, as well as frequency deviation, can be realized through the outage stage of the voltage source converter (VSC) and instantaneously performs power sharing. This method is becoming an alternative approach for system planners and operators. In MTDC grids, the AD approach is applied to offer a better performance of the VSC, which enables the sharing of the burden of power mismatch. For instance, [84,85] include frequency support and ensure sufficient power sharing by considering the available headroom of each converter station into the control action. This means that when the VSC relatively achieves the operating point (close to limits), it has the capability to constrain the burden of loss sharing to a great extent to the neighboring converters with higher headroom and spare capacity. The relationship of voltage–current–frequency (V-I-f) characteristics is derived to establish the correlation between frequency and DC voltage. It can adjust its DC voltage reference autonomously according to grid frequency deviation. Hence, it offers the avoidance of overloading and burden in a desirable way. In [86], it is reported that a better dynamic security assessment is performed and autonomous power sharing is provided following the outage of the VSC. It offers stability-constrained adaptive droop gains through the trajectory sensitivity analysis (TSA)-based approach. Meanwhile, the enhancement of power load sharing and the minimization of circulating currents in low-voltage DC microgrid are presented in [87,88]. It can be achieved by applying AD resistance and instantaneous virtual resistance shifting to compensate the trade-off between the difference in current sharing and the adaptive voltage positioning. Fast transient response is shown through the right-half-plane zero analysis method, where the stability of the system is guaranteed when the series resistance zero is above the equivalent to right-half-plane zero. The integration of wind farm converters in MTDC grids can be found in [89]. Power sharing improvement and voltage deviation minimization under the presence of any faults and power imbalances in the system can be achieved by employing the voltage droop control with the help of the derated operation of the wind farm converters. It offers control freedom over the active power adjustment and provides ancillary services to the primary grid. In [90], the study integrates a wind farm converter with fuzzy logic-based control. The method can update the droop coefficient through the availability of power capacity of the converters, which revamps the conventional fixed droop coefficient. Through this method, the scheme continuously tracks the dynamic behaviors of the converters and realizes desirable responses under different outage scenarios. As found by the authors, the AD scheme ensuring good transient response within proper power sharing, its still experience high computational burden and slow dynamic response.
- Robust droop (RD): An RD controller based on the uncertainty and disturbance estimator (UDE) for the nonaffine nonlinear system is presented in [91,92,93]. The UDE control algorithm relies upon the assumption that uncertainties and disturbances can be estimated through a filter with an adequate bandwidth. In such a way, the system disturbances and the model nonlinearity can be determined and compensated thoroughly. This method offers a straightforward implementation and does not require inner current control and voltage control schemes. Meanwhile, the regulation of DC-link voltage and robust power sharing in grid-connected VSC-MTDC grids is introduced in [94] by considering the impacts of the droop controller’s response, instantaneous power, and DC-side uncertainties. The realization of the controller parameter tuning is through the polynomial method to fix the poles of the equation’s trait under possible variations in the droop gain. As a result, it ensures rigid performance under sizeable differences in the converter’s operating point to a great extent, as well as under parametric uncertainties and during the occurrence of disturbances. It can increase the system stabilization’s effectiveness as well as guaranteeing a robust performance within the system. According to [95], the enhancement of the load voltage drop due to the load and the droop effect can be realized via proportional load sharing. The RD control scheme is integrated with the secondary control. Thus, the load voltage can be retained within the desired range around the nominal value, providing better stability and robustness against disturbances, feeder impedance, and component mismatches. The work in [96] concerns the robust dynamic droop’s power sharing for the integration of wind turbines and fuel cells. It employs reverse and direct droop controls, where the reverse droop control is responsible for active and reactive power regulation, while the direct droop control is for the frequency and voltage outputs, which are significantly used for the fuel cells. The adjustment of frequency and voltage within the microgrid can be tracked robustly at specifically designed set points and instantaneously provides better power sharing performance. In the case of a low-inertia wind turbine, a robust control method that is invulnerable against system nonlinearities and changes in the network is reported in [97]. The control scheme exploits multivariable H∞, which integrates with the centralized multi-input-multi-output (MIMO) controller (set reference of active and reactive powers) and the local measurements of active and reactive powers of the droop controllers. The application has excellent power sharing performance against significant disturbances and interconnection operation. In high-voltage microgrid applications, the work in [98] utilizes the signal detection on the high-voltage side of the coupling transformer as the feedback signal. The line impedance is the dominated part of grid impedance (coupling transformer), and hence the impact of line impedance on the power load sharing can be mitigated significantly, especially on the reactive power relationship.
- Feedforward control: An enhanced power flow control is demonstrated in [72] by introducing a feedforward control of the primary grid voltage amplitude and frequency to mitigate the impacts of grid fluctuation on power flow control. It offers improvement in controller stability and provides seamless transitions for grid-connected operation. A similar approach observed in [99] through an adaptive feedforward compensation provides better steady-state power sharing performance while keeping the voltage and frequency regulation. Thus, the robustness of the system stability is enhanced against droop coefficients and network uncertainties.
3.2.2. Non-Droop-Based Control
- Master and slave: Similarly considered as a secondary control, it consists of a voltage controller for controlling the output voltage to provide a current reference for the other units that assigns the master-slave units. A literature review on this particular method can be found in [30,100,101,102]. The master unit can be defined through a fixed module arbitrarily or based on the maximum current. In the case of a grid-connected mode, the grid itself is presented as the master unit and no specific control is required for grid-connected and islanding operations. For instance, in [103,104], a supplemental control algorithm is proposed to provide speedy response and sophisticated operating conditions for multiple inverters in an autonomous microgrid; thus, the active and reactive powers are shared accurately according to load demands. In [105], a voltage controller is added with a robust controller that is combined with an automatic master control for the precision of output voltage.
- Concentrated control: The operation of this method is based on a central controller by means of a communication link between the central control and the other units. This method consists of the central limit control of power deviation, and their reviews can be found in [106,107,108]. The current reference value is regulated by the voltage controller. It provides a higher degree of power quality, whether in ideal or transient conditions. However, it requires a high-bandwidth communication link, which increases capital cost.
- Instantaneous power theory (IPT): In [109,110], power sharing could be achieved among parallel DGs devoid of any communication between the devices. An enhancement of IPT is included in [111], which uses a new signal decomposition technique with a great extent of selectivity, thus making it immune to unbalanced and nonlinear power systems. A similar approach in [112] makes the necessary modifications in the fundamental computation to remedy the compensation under any condition of the voltage supply. Another method is presented in [113] for grid-connected VSI under transient conditions, employing an adaptive transformation that instantaneously makes adjustments accordingly to the dynamic voltage conditions, which allows control over constant and oscillating instantaneous power.
- Direct Power Control (DPC): The DPC algorithm has become an alternative for power sharing control, particularly in grid-connected mode of operation. To provide the reference value of power, it solely relies upon the p-q theory to adjust the instantaneous active and reactive power errors and maintaining them within a constant hysteresis band [114,115]. Due to the straightforward implementation, it offers several benefits: (1) no grid voltage information is required, as it can be realized through a binary algorithm, (2) compatibility with both sinusoidal and non-sinusoidal voltage signals, and (3) minimal commutation on converter switches.
3.3. Voltage and Frequency Restoration for Secondary Control
- Centralized controller: The principle of the centralized control approach is identical with the inner loop control, as described in Section 3. As previously mentioned, MGCC is responsible for power management, voltage and frequency regulations, and the interconnection with the utility grid. The principal operations are via a communication link that receives the information from the primary network when operating in grid-connected mode and passing the references value to the primary control level. The studies in [20,27,66] show examples of this approach. They mainly concern the coordination of the control strategy that depends on the communication network to provide a satisfactory operation and power sharing of generation and storage devices. Worth mentioning, all the decision making, collaboration, and prioritization are achieved more efficiently when information is collected at a single point through the central controller. However, the significant weakness in the MGCC approach is the dependency of the regulations on the central controller, which means that the system performance degrades during the presence of a malfunction at a single point of communications in the central controller. Besides, the communication link among devices offers unreliable operation in terms of maintenance and cost considerations.
- Decentralized controller: A distributed secondary control or MAS network is reportedly a promising method for improving microgrid stability and performance while enhancing the reliability and scalability of the microgrid. The permanent inherent limitations of the primary control, especially the deviations of voltage and frequency, could be counteracted through finite-time and event-triggered control methods, among others.
- Consensus algorithm (CA): CA is widely employed in voltage and frequency regulation schemes, wherein the reference values are distributed among all the primary controllers. The most popular methods are through a distributed cooperative finite-time secondary control [22,116] by employing a neighbor-based linear consensus algorithm that allows each controller to communicate with each other and also by employing the so-called sparse communication network. While the consensus of the voltage and frequency set reference values is accomplished over an infinite time horizon with exponential convergence, as in [104,117], the authors apply feedback linearization methods for voltage restoration and finite-time control protocol is used to synchronize frequency to the nominal value, simultaneously achieving accurate active power sharing among the DG units. A similar approach is introduced in [118], which is capable of both restoring V-f and guaranteeing reactive power sharing as well. The secondary control under switching communication topology is designed in [119], where MAS network is used for controller stability analysis. A distributed approach offers flexibility and reliability in terms of central control avoidance, which means that the failure of a single unit will not degrade the entire system. Meanwhile, in [120], the restoration of the voltage to the nominal value is realized through the dynamic consensus-based method. The enhancement of flexibility and reliability of the microgrid system is ensured without line impedance consideration.
- Event-triggered: ETC is another approach for data sharing when a condition is fulfilled or an event is triggered, instead of continuously exchanging data among the DGs unit. In such a way, a sampled data is controlled through a designed mechanism [121]. Numerous methods have been proposed in recent years, such as the time-triggered, event-triggered, and self-triggered sampling methods; their reports can be found in [122,123,124]. ETC makes a computation that relies upon the measurement error and the last event of the variable states. The error is the difference between the measured and the observed values of the variable states. The benefits of ETC is that it is able to maintain superior closed-loop stability and performance while reducing the number of information exchange among the DGs. A centralized ETC can be found in [125], which provides with an auxiliary controller that corresponds to collect all the variable states. It simplifies the number of controller updates. However, the secondary compensation terms in ETC are realized via a pure integrator that compromise a poor transient response.
4. Grid Synchronization for the Secondary Control Unit
4.1. Phase-Locked Loop
- SRF-PLL: Studies in [140,145,146,147] have shown that this technique is the basic scheme in the three-phase system. It offers a rapid and accurate estimation of the phase angle/frequency in ideal grid conditions and offers a straightforward implementation. The operation of SRF-PLL is through the natural frame (abc) being transformed into the dq reference frame through Park’s transformation. Despite fast and accurate phase estimation in ideal conditions, the performance is highly degraded against abrupt shifting in the phase angle as well as double frequency errors in negative sequence [148], which are caused by frequency deviation, distorted grid voltage, and the presence of harmonics. Several methods with different techniques and algorithms have been proposed to address these issues: decoupled double SRF-PLL (DDSRF-PLL) [147,149], modified SRF-PLL (MSRF-PLL) [150], and adaptive lattice SRF-PLL (ALSRF-PLL) [151].
- SOGI-PLL: SOGI is widely used in the quadrature signal generator (QSG). Also called quadrature-PLL, it seamlessly detects the positive-sequence component to estimate the input signal in-phase and also the quadrature-phase amplitude. Dual SOGI-PLL (DSOGI-PLL) [137,152] corresponds to the transformation of the voltage vectors in the stationary reference frame (αβ) into QSG, which presents the filtered voltage vector. The positive-sequence voltage vector is obtained via the positive-sequence calculator (PFC), and the q-component is equivalent to zero. As a result, it is able to estimate an accurate phase angle under severe fault conditions such as slow dynamics and large frequency overshoots. On the other hand, a frequency feedback loop is adopted for SOGI resonance frequency under a frequency shift. Some results in [153] demonstrate a rather fast dynamic response and harmonics filter capability. A frequency-fixed SOGI-PLL (FFSOGI-PLL) [154,155] has been introduced to enhance the conventional method by eliminating the frequency feedback loop, thereby increasing the speed and accuracy of the frequency trade-off.
- FRF-PLL: FRF-PLL detects the angular frequency and is used for synchronization purposes instead of for phase angle detection. Thus, the fundamental component is provided in fixed-reference-frame coordinates, including both positive and negative sequences, and makes the assumptions of the angular frequency as an uncertain parameter [156,157]. The operation’s performance under unbalanced conditions is reported in [142,158] as being robust against variations in angular frequency and the sag or swells in voltage.
- E-PLL: Using E-PLL, the authors in [159] track the three-phase input signal variables in terms of frequency, amplitude, and phase angle. The fundamental operation is through the extraction of the positive-sequence component of the input signal through an adaptive band-pass filter, as it adjusts the transfer function in proportion to the error signal. It shows a higher degree level of transient response and thus delivers smooth and accurate detection of the fundamental parameters within zero steady-state error. As a result, it provides a robust and precise performance under grid contingencies.
4.2. Frequency-Locked Loop
4.3. Discrete Fourier Transform (DFT)
4.4. Weighted Least Square Estimation (WLSE)
4.5. Synchronverter
5. Possibility Implementation of Frequency Self-Restoration Based on i-Droop Function and DER Impacts
6. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Meckling, J.; Sterner, T.; Wagner, G. Policy sequencing toward decarbonization. Nat. Energy 2017, 2, 918–922. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2020, 5, 1905–1919. [Google Scholar] [CrossRef]
- Mueller, J.A.; Kimball, J.W. An Efficient Method of Determining Operating Points of Droop-Controlled Microgrids. IEEE Trans. Energy Convers. 2017, 32, 1432–1446. [Google Scholar] [CrossRef]
- VanDoorn, T.L.; Meersman, B.; De Kooning, J.D.M.; Vandevelde, L. Transition from Islanded to Grid-Connected Mode of Microgrids with Voltage-Based Droop Control. IEEE Trans. Power Syst. 2013, 28, 2545–2553. [Google Scholar] [CrossRef]
- Zhang, D.; Fletcher, J. Operation of Autonomous AC Microgrid at Constant Frequency and with Reactive Power Generation from Grid-forming, Grid-supporting and Grid-feeding Generators. IEEE Proc. TENCON 2019, 10, 1560–1565. [Google Scholar]
- Unamuno, E.; Barrena, J.A. Hybrid ac/dc microgrids—Part II: Review and classification of control strategies. Renew. Sustain. Energy Rev. 2015, 52, 1123–1134. [Google Scholar] [CrossRef]
- Huang, X.; Wang, K.; Qiu, J.; Hang, L.; Li, G.; Wang, X. Decentralized Control of Multi-Parallel Grid-Forming DGs in Islanded Microgrids for Enhanced Transient Performance. IEEE Access 2019, 7, 17958–17968. [Google Scholar] [CrossRef]
- Yoon, S.; Oh, H.; Choi, S. Controller Design and Implementation of Indirect Current Control Based Utility-Interactive Inverter System. IEEE Trans. Power Electron. 2013, 28, 26–30. [Google Scholar] [CrossRef]
- Ketabi, A.; Rajamand, S.S.; Shahidehpour, M. Power sharing in parallel inverters with different types of loads. IET Gener. Transm. Distrib. 2017, 11, 2438–2447. [Google Scholar] [CrossRef]
- Ochs, D.S.; Mirafzal, B.; Sotoodeh, P. A Method of Seamless Transitions Between Grid-Tied and Stand-Alone Modes of Operation for Utility-Interactive Three-Phase Inverters. IEEE Trans. Ind. Appl. 2014, 50, 1934–1941. [Google Scholar] [CrossRef]
- Mariam, L.; Basu, M.; Conlon, M.F. Microgrid: Architecture, policy and future trends. Renew. Sustain. Energy Rev. 2016, 64, 477–489. [Google Scholar] [CrossRef]
- IEEE Standards Coordinating Committee 21. IEEE Standards 1547 for Interconnecting Distributed Resources with Electric Power Systems; The Institute of Electrical and Electronic Engineers: New York, NY, USA, 2003. [Google Scholar]
- Basso, T. IEEE 1547 and 2030 Standards for Distributed Energy Resources Interconnection and Interoperability with the Electricity Grid; National Renewable Energy Laboratory: Golden, CO, USA, 2014.
- Colet, A.; Alvarez-Cuevas-Figuerola, F.; Ruiz-Alvarez, A.; Gomis-Bellmunt, O.; Sudria-Andreu, A. Centralized and Distributed Active and Reactive Power Control of a Utility Connected Microgrid Using IEC61850. IEEE Syst. J. 2011, 6, 58–67. [Google Scholar] [CrossRef]
- Tsikalakis, A.G.; Hatziargyriou, N.D. Centralized Control for Optimizing Microgrids Operation. IEEE Transf. Energy Convert. 2011, 23, 1–8. [Google Scholar]
- Olivares, D.E.; Canizares, C.A.; Kazerani, M. A centralized optimal energy management system for microgrids. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Cai, H.; Xiang, J.; Chen, M.Z.Q.; Wei, W. A decentralized control strategy for photovoltaic sources to unify MPPT and DC-bus voltage regulation. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; Volume 5090, pp. 1–6. [Google Scholar] [CrossRef]
- De Matos, J.G.; Silva, F.S.F.; Ribeiro, L.A.D.S. Power Control in AC Isolated Microgrids with Renewable Energy Sources and Energy Storage Systems. IEEE Trans. Ind. Electron. 2015, 62, 3490–3498. [Google Scholar]
- Wu, D.; Tang, F.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Autonomous Active Power Control for Islanded AC Microgrids with Photovoltaic Generation and Energy Storage System. IEEE Trans. Energy Convers. 2014, 29, 882–892. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; De Vicuña, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Meng, L.; Shafiee, Q.; Trecate, G.F.; Karimi, H.; Fulwani, D.; Lu, X.; Guerrero, J.M. Review on Control of DC Microgrids and Multiple Microgrid Clusters. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 928–948. [Google Scholar]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.-L.; Loh, P.C. Advanced Control Architectures for Intelligent Microgrids—Part I: Decentralized and Hierarchical Control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]
- Timbus, A.; Liserre, M.; Teodorescu, R.; Rodriguez, P.; Blaabjerg, F. Evaluation of Current Controllers for Distributed Power Generation Systems. IEEE Trans. Power Electron. 2009, 24, 654–664. [Google Scholar] [CrossRef]
- Yan, X.; Cui, Y. Control Method of Parallel Inverters with Self-Synchronizing Characteristics in Distributed Microgrid. Energies 2019, 12, 3871. [Google Scholar] [CrossRef]
- Yao, G.; Lu, Z.; Wang, Y.; Benbouzid, M.; Moreau, L. A Virtual Synchronous Generator Based Hierarchical Control Scheme of Distributed Generation Systems. Energies 2017, 10, 2049. [Google Scholar] [CrossRef]
- El Tawil, T.; Yao, G.; Charpentier, J.F.; Benbouzid, M. Design and analysis of a virtual synchronous generator control strategy in microgrid application for stand-alone sites. IET Gener. Transm. Distrib. 2019, 13, 2154–2161. [Google Scholar] [CrossRef]
- Agundis-Tinajero, G.; Segundo-Ramírez, J.; Visairo-Cruz, N.; Savaghebi, M.; Guerrero, J.M.; Barocio, E. Power flow modeling of islanded AC microgrids with hierarchical control. Int. J. Electr. Power Energy Syst. 2019, 105, 28–36. [Google Scholar] [CrossRef]
- Zia, M.F.; Elbouchikhi, E.; Benbouzid, M. Microgrids energy management systems: A critical review on methods, solutions, and prospects. Appl. Energy 2018, 222, 1033–1055. [Google Scholar] [CrossRef]
- Hernandez-Aramburo, C.; Green, T.; Mugniot, N. Fuel Consumption Minimization of a Microgrid. IEEE Trans. Ind. Appl. 2005, 41, 673–681. [Google Scholar] [CrossRef]
- Almada, J.; Leão, R.P.; Sampaio, R.; Barroso, G.C. A centralized and heuristic approach for energy management of an AC microgrid. Renew. Sustain. Energy Rev. 2016, 60, 1396–1404. [Google Scholar] [CrossRef]
- Belila, A.; Benbouzid, M.; Berkouk, E.; Amirat, Y. On Energy Management Control of a PV-Diesel-ESS Based Microgrid in a Stand-Alone Context. Energies 2018, 11, 2164. [Google Scholar] [CrossRef]
- Zia, M.F.; Elbouchikhi, E.; Benbouzid, M.; Guerrero, J.M. Energy Management System for an Islanded Microgrid With Convex Relaxation. IEEE Trans. Ind. Appl. 2019, 55, 7175–7185. [Google Scholar] [CrossRef]
- Ye, P.; Sun, B.; Yang, B.; Huang, X.; Sun, F. An optimal power flow based algorithm for coordinated secondary voltage control. In Proceedings of the 2009 Asia-Pacific Power and Energy Engineering Conference, Wuhan, China, 27–31 March 2009; pp. 1–4. [Google Scholar]
- Shotorbani, A.M.; Ghassem-Zadeh, S.; Mohammadi-Ivatloo, B.; Hosseini, S.H. A distributed secondary scheme with terminal sliding mode controller for energy storages in an islanded microgrid. Int. J. Electr. Power Energy Syst. 2017, 93, 352–364. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, K.; Li, H.; Coelho, E.A.A.; Guerrero, J.M. MAS-Based Distributed Coordinated Control and Optimization in Microgrid and Microgrid Clusters: A Comprehensive Overview. IEEE Trans. Power Electron. 2018, 33, 6488–6508. [Google Scholar] [CrossRef]
- Dimeas, A.L.; Hatziargyriou, N.D. Operation of a Multiagent System for Microgrid Control. IEEE Trans. Power Syst. 2005, 20, 1447–1455. [Google Scholar] [CrossRef]
- Logenthiran, I.; Naayagi, R.T.; Woo, W.L.; Phan, V.T.; Abidi, K. Intelligent Control System for Microgrids Using Multiagent System. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 1036–1045. [Google Scholar] [CrossRef]
- Karavas, C.-S.; Kyriakarakos, G.; Arvanitis, K.G.; Papadakis, G. A multi-agent decentralized energy management system based on distributed intelligence for the design and control of autonomous polygeneration microgrids. Energy Convers. Manag. 2015, 103, 166–179. [Google Scholar] [CrossRef]
- Etxegarai, A.; Eguia, P.; Torres, E.; Iturregi, A.; Valverde, V. Review of grid connection requirements for generation assets in weak power grids. Renew. Sustain. Energy Rev. 2015, 41, 1501–1514. [Google Scholar] [CrossRef]
- Zolfaghari, M.; Arani, A.A.K.; Gharehpetian, G.B.; Abedi, M. A fractional order proportional-integral controller design to improve load sharing between DGs in microgrid. In Proceedings of the 2016 Smart Grids Conference (SGC), Kerman, Iran, 20–21 December 2016; pp. 25–29. [Google Scholar]
- Arafat, M.N.; Palle, S.; Sozer, Y.; Husain, I. Transition control strategy between standalone and grid-connected operations of voltage-source inverters. IEEE Trans. Ind. Appl. 2012, 48, 1516–1525. [Google Scholar] [CrossRef]
- Vidal, A.; Yepes, A.G.; Freijedo, F.D.; Lopez, O.; Malvar, J.; Baneira, F.; Doval-Gandoy, J. A Method for Identification of the Equivalent Inductance and Resistance in the Plant Model of Current-Controlled Grid-Tied Converters. IEEE Trans. Power Electron. 2015, 30, 7245–7261. [Google Scholar] [CrossRef]
- Yuan, X.; Allmeling, J.; Merk, W.; Stemmler, H. Stationary frame generalized integrators for current control of active power filters with zero steady state error for current harmonics of concern under unbalanced and distorted operation conditions. IEEE Trans. Ind. Appl. 2002, 38, 523–532. [Google Scholar] [CrossRef]
- Holmes, D.G.; Lipo, T.A.; McGrath, B.P.; Kong, W.Y. Optimized Design of Stationary Frame Three Phase AC Current Regulators. IEEE Trans. Power Electron. 2009, 24, 2417–2426. [Google Scholar] [CrossRef]
- Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Loh, P. Proportional-resonant controllers and filters for grid-connected voltage-source converters. IEE Proc. Electron. Power Appl. 2006, 153, 750. [Google Scholar] [CrossRef]
- Lenwari, W. Optimized design of modified proportional-resonant controller for current control of active filters. In Proceedings of the 2013 IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; Volume 9, pp. 1–6. [Google Scholar] [CrossRef]
- Vidal, A.; Freijedo, F.D.; Yepes, A.G.; Fernandez-Comesana, P.; Malvar, J.; Lopez, Ó.; Doval-Gandoy, J. Assessment and Optimization of the Transient Response of Proportional-Resonant Current Controllers for Distributed Power Generation Systems. IEEE Trans. Ind. Electron. 2012, 60, 1367–1383. [Google Scholar] [CrossRef]
- Zhao, W.; Lu, D.D.C.; Agelidis, V.G. Current control of grid-connected boost inverter with zero steady-state error. IEEE Trans. Power Electron. 2011, 26, 2825–2834. [Google Scholar] [CrossRef]
- Lim, J.S.; Park, C.; Han, J.; Lee, Y.I.; Lim, J.S.; Park, C.; Han, J.; Lee, Y.I. Robust Tracking Control of a Three-Phase DC–AC Inverter for UPS Applications. IEEE Trans. Ind. Electron. 2013, 61, 4142–4151. [Google Scholar] [CrossRef]
- Mohamed, Y.A.-R.I.; El-Saadany, E.F. An Improved Deadbeat Current Control Scheme with a Novel Adaptive Self-Tuning Load Model for a Three-Phase PWM Voltage-Source Inverter. IEEE Trans. Ind. Electron. 2007, 54, 747–759. [Google Scholar] [CrossRef]
- Mohamed, Y.A.-R.I.; Rahman, M.A.; Seethapathy, R. Robust Line-Voltage Sensorless Control and Synchronization of LCL-Filtered Distributed Generation Inverters for High Power Quality Grid Connection. IEEE Trans. Power Electron. 2012, 27, 87–98. [Google Scholar] [CrossRef]
- Mohamed, Y.A.-R.I.; El-Saadany, E.F. Adaptive Discrete-Time Grid-Voltage Sensorless Interfacing Scheme for Grid-Connected DG-Inverters Based on Neural-Network Identification and Deadbeat Current Regulation. IEEE Trans. Power Electron. 2008, 23, 308–321. [Google Scholar] [CrossRef]
- Mohseni, M.; Islam, S.M. A New Vector-Based Hysteresis Current Control Scheme for Three-Phase PWM Voltage-Source Inverters. IEEE Trans. Power Electron. 2010, 25, 2299–2309. [Google Scholar] [CrossRef]
- Rahman, K.M.; Khan, M.R.; Choudhury, M.A.; Rahman, M. Variable-band hysteresis current controllers for PWM voltage-source inverters. IEEE Trans. Power Electron. 1997, 12, 964–970. [Google Scholar] [CrossRef]
- Tilli, A.; Tonielli, A. Sequential design of hysteresis current controller for three-phase inverter. IEEE Trans. Ind. Electron. 1998, 45, 771–781. [Google Scholar] [CrossRef]
- Dey, A.; Rajeevan, P.; Biju, K.; Mathew, K.; Gopakumar, K. A Space-Vector-Based Hysteresis Current Controller for a General n-Level Inverter-Fed Drive with Nearly Constant Switching Frequency Control. IEEE Trans. Ind. Electron. 2012, 60, 1989–1998. [Google Scholar] [CrossRef]
- Davoodnezhad, R.; Holmes, D.G.; McGrath, B. A Novel Three-Level Hysteresis Current Regulation Strategy for Three-Phase Three-Level Inverters. IEEE Trans. Power Electron. 2013, 29, 6100–6109. [Google Scholar] [CrossRef]
- Shan, Y.; Hu, J.; Li, Z.; Guerrero, J.M. A Model Predictive Control for Renewable Energy Based AC Microgrids without Any PID Regulators. IEEE Trans. Power Electron. 2018, 33, 9122–9126. [Google Scholar] [CrossRef]
- Nam, N.N.; Choi, M.; Lee, Y.I. Model Predictive Control of a Grid-Connected Inverter with LCL Filter using Robust Disturbance Observer. IFAC PapersOnLine 2019, 52, 135–140. [Google Scholar] [CrossRef]
- Yang, Y.; Tan, S.-C.; Hui, S.Y.R. Adaptive Reference Model Predictive Control with Improved Performance for Voltage-Source Inverters. IEEE Trans. Control Syst. Technol. 2018, 26, 724–731. [Google Scholar] [CrossRef]
- Li, X.; Zhang, H.; Shadmand, M.B.; Balog, R.S. Model Predictive Control of a Voltage-Source Inverter with Seamless Transition between Islanded and Grid-Connected Operations. IEEE Trans. Ind. Electron. 2017, 64, 7906–7918. [Google Scholar] [CrossRef]
- Abdelmadjid, G.; Seghir, B.M.; Ahmed, S.; Messlem, Y.; Safa, A. Sensorless Sliding Mode Vector Control of Induction Motor Drives. Int. J. Power Electron. Drive Syst. 2012, 2, 277–284. [Google Scholar] [CrossRef]
- Han, Y.; Ma, R.; Cui, J. Adaptive Higher-Order Sliding Mode Control for Islanding and Grid-Connected Operation of a Microgrid. Energies 2018, 11, 1459. [Google Scholar] [CrossRef]
- Safa, A.; Berkouk, E.M.; Messlem, Y.; Gouichiche, A. A robust control algorithm for a multifunctional grid tied inverter to enhance the power quality of a microgrid under unbalanced conditions. Int. J. Electr. Power Energy Syst. 2018, 100, 253–264. [Google Scholar] [CrossRef]
- Jin, W.; Li, Y.; Sun, G.; Bu, L. H∞ Repetitive Control Based on Active Damping with Reduced Computation Delay for LCL-Type Grid-Connected Inverters. Energies 2017, 10, 586. [Google Scholar] [CrossRef]
- Sedhom, B.E.; Hatata, A.Y.; El-Saadawi, M.M.; Abd-Raboh, E.-H.E.; Elkis, B.; Abd-Rabo, H. Robust adaptive H-infinity based controller for islanded microgrid supplying non-linear and unbalanced loads. IET Smart Grid 2019, 2, 420–435. [Google Scholar] [CrossRef]
- Parisio, A.; Rikos, E.; Glielmo, L. A Model Predictive Control Approach to Microgrid Operation Optimization. IEEE Trans. Control. Syst. Technol. 2014, 22, 1813–1827. [Google Scholar] [CrossRef]
- Cortés, P.; Kazmierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodriguez, J. Predictive control in power electronics and drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Mokhtar, M.; Marei, M.I.; El-Sattar, A.A. An Adaptive Droop Control Scheme for DC Microgrids Integrating Sliding Mode Voltage and Current Controlled Boost Converters. IEEE Trans. Smart Grid 2019, 10, 1685–1693. [Google Scholar] [CrossRef]
- Hornik, T.; Zhong, Q.-C. A Current-Control Strategy for Voltage-Source Inverters in Microgrids Based on H∞ and Repetitive Control. IEEE Trans. Power Electron. 2011, 26, 943–952. [Google Scholar] [CrossRef]
- Vandoorn, T.L.; Guerrero, J.M.; De Kooning, D.M.; Vasquez, J.C.; Vandevelde, L. Decentralized and centralized control of islanded microgrids including reserve management. IEEE Ind. Electron. Mag. 2013, 7, 42–55. [Google Scholar] [CrossRef]
- Deng, Y.; Tao, Y.; Chen, G.; Li, G.; He, X. Enhanced Power Flow Control for Grid-Connected Droop-Controlled Inverters with Improved Stability. IEEE Trans. Ind. Electron. 2016, 64, 5919–5929. [Google Scholar] [CrossRef]
- Sampaio, L.P.; De Brito, M.A.G.; Alves, M.G.; E Melo, G.A.; Canesin, C.A. Robust control applied to power flow control in single-phase inverter with LCL filter, using droop control and D-stability. In Proceedings of the 2012 10th IEEE/IAS International Conference on Industry Applications, Fortaleza, Brazil, 5–7 November 2012; pp. 1–8. [Google Scholar]
- Anand, S.; Fernandes, B.G.; Guerrero, J.M. Distributed Control to Ensure Proportional Load Sharing and Improve Voltage Regulation in Low-Voltage DC Microgrids. IEEE Trans. Power Electron. 2013, 28, 1900–1913. [Google Scholar] [CrossRef]
- Jackson, R.; Zulkifli, S.A.; Sham, N.M.B. Power Flow Control Scheme for Hybrid Single-Phase Energy System Using Droop Control: A Comprehensive Survey. Int. Rev. Electr. Eng. 2018, 13, 305. [Google Scholar] [CrossRef]
- Ding, G.; Gao, F.; Li, R.; Wu, B. A Communicationless PCC Voltage Compensation Using an Improved Droop Control Scheme in Islanding Microgrids. J. Power Electron. 2017, 17, 294–304. [Google Scholar] [CrossRef]
- Shuvra, M.; Chowdhury, B. Autonomous control of smart inverters in grid connected and islanded mode. In Proceedings of the 2017 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 23–26 April 2017; pp. 1–5. [Google Scholar]
- Li, Y.W.; Kao, C.N. An Accurate Power Control Strategy for Power-Electronics-Interfaced Distributed Generation Units Operating in a Low-Voltage Multibus Microgrid. IEEE Trans. Power Electron. 2009, 24, 2977–2988. [Google Scholar] [CrossRef]
- Lu, Z.; Li, W.; Li, Z.; Chen, X.; Lu, H.H.C.; Dong, N.; Liu, X. Adaptive droop control with self-adjusted virtual impedance for three-phase inverter under unbalanced conditions. In Proceedings of the 2017 IEEE International Symposium on Circuits and Systems (ISCAS), Baltimore, MD, USA, 28–31 May 2017; pp. 6–9. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Guerrero, J.M.; Blaabjerg, F.; Vasquez, J.C. An Islanding Microgrid Using Enhanced Virtual Impedance Control Scheme. IEEE Trans. Power Electron. 2013, 28, 5272–5282. [Google Scholar] [CrossRef]
- Liu, B.; Liu, Z.; Liu, J.; An, R.; Zheng, H.; Shi, Y. An Adaptive Virtual Impedance Control Scheme Based on Small-AC-Signal Injection for Unbalanced and Harmonic Power Sharing in Islanded Microgrids. IEEE Trans. Power Electron. 2019, 34, 12333–12355. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Accurate Reactive Power Sharing in an Islanded Microgrid Using Adaptive Virtual Impedances. IEEE Trans. Power Electron. 2015, 30, 1605–1617. [Google Scholar] [CrossRef]
- Kim, S.; Han, J.; Sun, Q. Consensus-based improved droop control for suppressing circulating current using adaptive virtual impedance in microgrids. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 4473–4478. [Google Scholar]
- Wang, W.; Li, Y.; Cao, Y.; Haeger, U.; Rehtanz, C. Adaptive Droop Control of VSC-MTDC System for Frequency Support and Power Sharing. IEEE Trans. Power Syst. 2017, 33, 1264–1274. [Google Scholar] [CrossRef]
- Chaudhuri, N.R.; Chaudhuri, B. Adaptive droop control for effective power sharing in multi-terminal DC (MTDC) grids. IEEE Trans. Power Syst. 2013, 28, 21–29. [Google Scholar] [CrossRef]
- Yogarathinam, A.; Chaudhuri, N.R. Stability-Constrained Adaptive Droop for Power Sharing in AC-MTDC Grids. IEEE Trans. Power Syst. 2019, 34, 1955–1965. [Google Scholar] [CrossRef]
- Huang, H.-H.; Hsieh, C.-Y.; Liao, J.-Y.; Chen, K.-H. Adaptive Droop Resistance Technique for Adaptive Voltage Positioning in Boost DC–DC Converters. IEEE Trans. Power Electron. 2010, 26, 1920–1932. [Google Scholar] [CrossRef]
- Augustine, S.; Mishra, M.K.; Lakshminarasamma, N. Adaptive Droop Control Strategy for Load Sharing and Circulating Current Minimization in Standalone DC Low-voltage Microgrid. IEEE Trans. Energy Convers. 2015, 6, 132–141. [Google Scholar] [CrossRef]
- Kumar, A.S.; Padhy, B. An Adaptive Droop Control Strategy forAutonomous Power Sharing and DC Voltage Control in Wind Farm-MTDC grids. IET Renew. Power Gener. 2019, 13, 3180–3190. [Google Scholar] [CrossRef]
- Chen, X.; Wang, L.; Sun, H.; Chen, Y. Fuzzy Logic Based Adaptive Droop Control in Multiterminal HVDC for Wind Power Integration. IEEE Trans. Energy Convers. 2017, 32, 1200–1208. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Wang, Y.; Ren, B. UDE-Based Robust Droop Control of Inverters in Parallel Operation. IEEE Trans. Ind. Electron. 2017, 64, 7552–7562. [Google Scholar] [CrossRef]
- Wang, Y.; Ren, B.; Zhong, Q.-C. Robust Power Flow Control of Grid-Connected Inverters. IEEE Trans. Ind. Electron. 2016, 63, 6887–6897. [Google Scholar] [CrossRef]
- Ren, B.; Zhong, Q.-C.; Chen, J. Robust Control for a Class of Nonaffine Nonlinear Systems Based on the Uncertainty and Disturbance Estimator. IEEE Trans. Ind. Electron. 2015, 62, 5881–5888. [Google Scholar] [CrossRef]
- Davari, M.; Mohamed, Y.A.-R.I. Robust Droop and DC-Bus Voltage Control for Effective Stabilization and Power Sharing in VSC Multiterminal DC Grids. IEEE Trans. Power Electron. 2017, 33, 4373–4395. [Google Scholar] [CrossRef]
- Zhong, Q.-C. Robust Droop Controller for Accurate Proportional Load Sharing Among Inverters Operated in Parallel. IEEE Trans. Ind. Electron. 2013, 60, 1281–1290. [Google Scholar] [CrossRef]
- Roozbehani, S.; Hagh, M.T.; Zadeh, S.G. Frequency control of islanded wind-powered microgrid based on coordinated robust dynamic droop power sharing. IET Gener. Transm. Distrib. 2019, 13, 4968–4977. [Google Scholar] [CrossRef]
- Hossain, J.; Pota, H.R.; Mahmud, M.A.; Aldeen, M. Robust Control for Power Sharing in Microgrids with Low-Inertia Wind and PV Generators. IEEE Trans. Sustain. Energy 2015, 6, 1067–1077. [Google Scholar] [CrossRef]
- Shuai, Z.; Mo, S.; Wang, J.; Shen, Z.J.; Tian, W.; Feng, Y. Droop control method for load share and voltage regulation in high-voltage microgrids. J. Mod. Power Syst. Clean Energy 2016, 4, 76–86. [Google Scholar] [CrossRef]
- Delghavi, M.B.; Yazdani, A. An Adaptive Feedforward Compensation for Stability Enhancement in Droop-Controlled Inverter-Based Microgrids. IEEE Trans. Power Deliv. 2011, 26, 1764–1773. [Google Scholar] [CrossRef]
- Caldognetto, T.; Tenti, P. Microgrids operation based on master-slave cooperative control. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1081–1088. [Google Scholar] [CrossRef]
- Meng, X.; Liu, Z.; Liu, J.; Wu, T.; Wang, S.; Liu, B. A seamless transfer strategy based on special master and slave DGs. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017; Volume 1, pp. 1553–1558. [Google Scholar]
- Cagnano, A.; De Tuglie, E.; Cervi, A.; Stecca, R.; Turri, R.; Vian, A. Re-Synchronization control strategy for master-slave controlled microgrids. In Proceedings of the 2019 1st International Conference on Energy Transition in the Mediterranean Area (SyNERGY MED), Cagliari, Italy, 28–30 May 2019; pp. 1–6. [Google Scholar]
- Xu, Y. Robust Finite-Time Control for Autonomous Operation of an Inverter-Based Microgrid. IEEE Trans. Ind. Inform. 2017, 13, 2717–2725. [Google Scholar] [CrossRef]
- Zuo, S.; Davoudi, A.; Song, Y.; Lewis, F.L. Distributed Finite-Time Voltage and Frequency Restoration in Islanded AC Microgrids. IEEE Trans. Ind. Electron. 2016, 63, 5988–5997. [Google Scholar] [CrossRef]
- Chiang, H.-C.; Jen, K.-K.; You, G.-H. Improved droop control method with precise current sharing and voltage regulation. IET Power Electron. 2016, 9, 789–800. [Google Scholar] [CrossRef]
- Ramos, R.; Biel, D.; Guinjoan, F.; Fossas, E. Sliding mode design of distributed central limit control strategy for parallel-connected inverters. In Proceedings of the VIII IEEE International Power Electronics Congress, 2002. Technical Proceedings. CIEP 2002, Guadalajara, Mexico, 24 October 2002; pp. 197–201. [Google Scholar]
- Banda, J.; Siri, K. Improved central-limit control for parallel-operation of DC-DC power converters. In Proceedings of the PESC ’95—Power Electronics Specialist Conference, Atlanta, GA, USA, 18–22 June 1995; pp. 1104–1110. [Google Scholar]
- Weckx, S.; Gonzalez, C.; Driesen, J. Combined Central and Local Active and Reactive Power Control of PV Inverters. IEEE Trans. Sustain. Energy 2014, 5, 776–784. [Google Scholar] [CrossRef]
- Furuhashi, T.; Okuma, S.; Uchikawa, Y. A study on the theory of instantaneous reactive power. IEEE Trans. Ind. Electron. 1990, 37, 86–90. [Google Scholar] [CrossRef]
- Czarnecki, L. Closure on “Instantaneous Reactive Power p-q Theory and Power Properties of Three-Phase Systems”. IEEE Trans. Power Deliv. 2008, 23, 1695–1696. [Google Scholar] [CrossRef]
- Harirchi, F.; Simões, M.G. Enhanced Instantaneous Power Theory Decomposition for Power Quality Smart Converter Applications. IEEE Trans. Power Electron. 2018, 33, 9344–9359. [Google Scholar] [CrossRef]
- Herrera, R.; Salmerón, P. Present point of view about the instantaneous reactive power theory. IET Power Electron. 2009, 2, 484–495. [Google Scholar] [CrossRef]
- Montanari, A.A.; Gole, A.M. Enhanced Instantaneous Power Theory for Control of Grid Connected Voltage Sourced Converters under Unbalanced Conditions. IEEE Trans. Power Electron. 2016, 32, 6652–6660. [Google Scholar] [CrossRef]
- Trivedi, T.A.; Jadeja, R.; Bhatt, P. A Review on Direct Power Control for Applications to Grid Connected PWM Converters. Eng. Technol. Appl. Sci. Res. 2015, 5, 841–849. [Google Scholar] [CrossRef]
- Jain, B.; Jain, S.; Nema, R. Control strategies of grid interfaced wind energy conversion system: An overview. Renew. Sustain. Energy Rev. 2015, 47, 983–996. [Google Scholar] [CrossRef]
- Dehkordi, N.M.; Sadati, N.; Hamzeh, M. Distributed Robust Finite-Time Secondary Voltage and Frequency Control of Islanded Microgrids. IEEE Trans. Power Syst. 2017, 32, 3648–3659. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Mao, J.; Song, Y.D. Distributed Secondary Voltage and Frequency Restoration Control of Droop-Controlled Inverter-Based Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4355–4364. [Google Scholar] [CrossRef]
- Shafiee, Q.; Vasquez, J.C.; Guerrero, J.M. Distributed secondary control for islanded MicroGrids—A networked control systems approach. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 5637–5642. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Li, C. Distributed finite-time cooperative control of droop-controlled microgrids under switching topology. IET Renew. Power Gener. 2017, 11, 707–714. [Google Scholar] [CrossRef]
- Zhou, J.; Kim, S.; Zhang, H.; Sun, Q.; Han, R. Consensus-Based Distributed Control for Accurate Reactive, Harmonic, and Imbalance Power Sharing in Microgrids. IEEE Trans. Smart Grid 2018, 9, 2453–2467. [Google Scholar] [CrossRef]
- Shi, J.; Yue, N.; Weng, S. Distributed event-triggered mechanism for secondary voltage control with microgrids. Trans. Inst. Meas. Control 2018, 41, 1553–1561. [Google Scholar] [CrossRef]
- Abdolmaleki, B.; Shafiee, Q.; Seifi, A.R.; Arefi, M.M.; Blaabjerg, F. A Zeno-Free Event-Triggered Secondary Control for AC Microgrids. IEEE Trans. Smart Grid 2020, 11, 1905–1916. [Google Scholar] [CrossRef]
- Fu, A.; Mazo, M. Traffic Models of Periodic Event-Triggered Control Systems. IEEE Trans. Autom. Control 2019, 64, 3453–3460. [Google Scholar] [CrossRef]
- Heemels, W.P.M.H.; Donkers, M.C.F.; Teel, A.R. Periodic event-triggered control for linear systems. IEEE Trans. Autom. Control 2013, 58, 847–861. [Google Scholar] [CrossRef]
- Qian, T.; Liu, Y.; Zhang, W.; Tang, W.; Shahidehpour, M. Event-Triggered Updating Method in Centralized and Distributed Secondary Controls for Islanded Microgrid Restoration. IEEE Trans. Smart Grid 2020, 11, 1387–1395. [Google Scholar] [CrossRef]
- Yazdani, D.; Pahlevaninezhad, M.; Bakhshai, A. Three-phase grid synchronization techniques for grid connected converters in distributed generation systems. In Proceedings of the 2009 IEEE International Symposium on Industrial Electronics, Seoul, Korea, 5–8 July 2009; pp. 1105–1110. [Google Scholar] [CrossRef]
- Cho, C.; Jeon, J.; Kim, J.; Kwon, S.; Park, K.; Kim, S. Active Synchronizing Control of a Microgrid. IEEE Trans. Power Electron. 2011, 26, 3707–3719. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Ming, W.-L.; Zeng, Y. Self-Synchronized Universal Droop Controller. IEEE Access 2016, 4, 7145–7153. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Nguyen, P.-L.; Ma, Z.; Sheng, W. Self-Synchronized Synchronverters: Inverters without a Dedicated Synchronization Unit. IEEE Trans. Power Electron. 2014, 29, 617–630. [Google Scholar] [CrossRef]
- Ashabani, M.; Freijedo, F.D.; Golestan, S.; Guerrero, J.M. Inducverters: PLL-Less Converters with Auto-Synchronization and Emulated Inertia Capability. IEEE Trans. Smart Grid 2016, 7, 1660–1674. [Google Scholar] [CrossRef]
- Tang, F.; Guerrero, J.M.; Vasquez, J.C.; Wu, D.; Meng, L. Distributed Active Synchronization Strategy for Microgrid Seamless Reconnection to the Grid under Unbalance and Harmonic Distortion. IEEE Trans. Smart Grid 2015, 6, 2757–2769. [Google Scholar] [CrossRef]
- Ramos, C.J.; Martins, A.P.; Carvalho, A.S. Frequency and Phase-Angle Estimation Using Ordinary Least Squares. IEEE Trans. Ind. Electron. 2015, 62, 5677–5688. [Google Scholar] [CrossRef]
- McGrath, B.P.; Holmes, D.G.; Galloway, J.J.H.G. Power Converter Line Synchronization Using a Discrete Fourier Transform (DFT) Based on a Variable Sample Rate. IEEE Trans. Power Electron. 2005, 20, 877–884. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C.; Abusorrah, A.M.; Al-Turki, Y. Modeling, Tuning, and Performance Comparison of Second-Order-Generalized-Integrator-Based FLLs. IEEE Trans. Power Electron. 2018, 33, 10229–10239. [Google Scholar] [CrossRef]
- Liu, B.; Zhuo, F.; Zhu, Y.; Yi, H.; Wang, F. A Three-Phase PLL Algorithm Based on Signal Reforming under Distorted Grid Conditions. IEEE Trans. Power Electron. 2015, 30, 5272–5283. [Google Scholar] [CrossRef]
- Yazdani, D.; Bakhshai, A.; Jain, P.K. Grid synchronization techniques for converter interfaced distributed generation systems. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 2007–2014. [Google Scholar] [CrossRef]
- Ali, Z.; Christofides, N.; Hadjidemetriou, L.; Kyriakides, E.; Guo, Q.; Blaabjerg, F. Three-phase phase-locked loop synchronization algorithms for grid-connected renewable energy systems: A review. Renew. Sustain. Energy Rev. 2018, 90, 434–452. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Kimball, J.W. Modeling and Tuning of an Improved Delayed-Signal-Cancellation PLL for Microgrid Application. IEEE Trans. Energy Convers. 2018, 34, 712–721. [Google Scholar] [CrossRef]
- Ramezani, M.; Golestan, S.; Li, S.; Guerrero, J.M. A Simple Approach to Enhance the Performance of Complex-Coefficient Filter-Based PLL in Grid-Connected Applications. IEEE Trans. Ind. Electron. 2017, 65, 5081–5085. [Google Scholar] [CrossRef]
- Taul, M.G.; Wang, X.; Davari, P.; Blaabjerg, F. An Overview of Assessment Methods for Synchronization Stability of Grid-Connected Converters under Severe Symmetrical Grid Faults. IEEE Trans. Power Electron. 2019, 34, 9655–9670. [Google Scholar] [CrossRef]
- Reza, S.; Sadeque, F.; Hossain, M.; Ghias, A.; Agelidis, V.G.; Agelidis, V.G. Three-Phase PLL for Grid-Connected Power Converters under Both Amplitude and Phase Unbalanced Conditions. IEEE Trans. Ind. Electron. 2019, 66, 8881–8891. [Google Scholar] [CrossRef]
- Escobar, G.; Martinez-Montejano, M.F.; Valdez, A.A.; Martinez, P.R.; Hernandez-Gomez, M. Fixed-Reference-Frame Phase-Locked Loop for Grid Synchronization under Unbalanced Operation. IEEE Trans. Ind. Electron. 2010, 58, 1943–1951. [Google Scholar] [CrossRef]
- Wu, F.; Zhang, L.; Duan, J. A New Two-Phase Stationary-Frame-Based Enhanced PLL for Three-Phase Grid Synchronization. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 251–255. [Google Scholar] [CrossRef]
- Guerrero-Rodríguez, N.F.; Rey-Boué, A.B.; Bueno, E.J.; Ortiz, O.; Reyes-Archundia, E. Synchronization algorithms for grid-connected renewable systems: Overview, tests and comparative analysis. Renew. Sustain. Energy Rev. 2017, 75, 629–643. [Google Scholar] [CrossRef]
- Tong, L.; Zou, X.; Feng, S.; Chen, Y.; Kang, Y.; Huang, Q.; Huang, Y. An SRF-PLL-Based Sensorless Vector Control Using the Predictive Deadbeat Algorithm for the Direct-Driven Permanent Magnet Synchronous Generator. IEEE Trans. Power Electron. 2013, 29, 2837–2849. [Google Scholar] [CrossRef]
- Chung, S.-K. A phase tracking system for three phase utility interface inverters. IEEE Trans. Power Electron. 2000, 15, 431–438. [Google Scholar] [CrossRef]
- Golestan, S.; Monfared, M.; Freijedo, F.D. Design-Oriented Study of Advanced Synchronous Reference Frame Phase-Locked Loops. IEEE Trans. Power Electron. 2012, 28, 765–778. [Google Scholar] [CrossRef]
- Rocabert, J.; Azevedo, G.M.S.; Luna, A.; Guerrero, J.M.; Candela, J.I.; Rodríguez, P. Intelligent Connection Agent for Three-Phase Grid-Connected Microgrids. IEEE Trans. Power Electron. 2011, 26, 2993–3005. [Google Scholar] [CrossRef]
- Rodríguez, P.; Pou, J.; Bergas, J.; Candela, J.I.; Burgos, R.P.; Boroyevich, D. Decoupled double synchronous reference frame PLL for power converters control. IEEE Trans. Power Electron. 2007, 22, 584–592. [Google Scholar] [CrossRef]
- Da Silva, C.H.; Pereira, R.R.; Da Silva, L.E.B.; Lambert-Torres, G.; Bose, B.K.; Ahn, S.U. A Digital PLL Scheme for Three-Phase System Using Modified Synchronous Reference Frame. IEEE Trans. Ind. Electron. 2010, 57, 3814–3821. [Google Scholar] [CrossRef]
- González-Espín, F.J.; Figueres, E.; Garcera, G. An Adaptive Synchronous-Reference-Frame Phase-Locked Loop for Power Quality Improvement in a Polluted Utility Grid. IEEE Trans. Ind. Electron. 2012, 59, 2718–2731. [Google Scholar] [CrossRef]
- Yada, H.K.; Kumar, A.S.; Prakash, K. Improved dual-SOGI control for three-phase unified power quality conditioner under distorted grid and load conditions. In Proceedings of the TENCON 2017—2017 IEEE Region 10 Conference, Penang, Malaysia, 5–8 November 2017; pp. 2536–2541. [Google Scholar]
- Golestan, S.; Mousazadeh, S.Y.; Guerrero, J.M.; Vasquez, J.C. A Critical Examination of Frequency-Fixed Second-Order Generalized Integrator-Based Phase-Locked Loops. IEEE Trans. Power Electron. 2017, 32, 6666–6672. [Google Scholar] [CrossRef]
- Xiao, F.; Dong, L.; Li, L.; Liao, X. A Frequency-Fixed SOGI-Based PLL for Single-Phase Grid-Connected Converters. IEEE Trans. Power Electron. 2017, 32, 1713–1719. [Google Scholar] [CrossRef]
- Guan, Q.; Zhang, Y.; Kang, Y.; Guerrero, J.M. Single-Phase Phase-Locked Loop Based on Derivative Elements. IEEE Trans. Power Electron. 2016, 32, 4411–4420. [Google Scholar] [CrossRef]
- Mojiri, M.; Bakhshai, A. Stability analysis of periodic orbit of an adaptive notch filter for frequency estimation of a periodic signal. Automatica 2007, 43, 450–455. [Google Scholar] [CrossRef]
- Yazdani, D.; Mojiri, M.; Bakhshai, A.; Joós, G. A Fast and Accurate Synchronization Technique for Extraction of Symmetrical Components. IEEE Trans. Power Electron. 2009, 24, 674–684. [Google Scholar] [CrossRef]
- Martínez-Montejano, M.; Escobar, G.; Torres-Olguin, R. Fixed reference frame phase-locked loop (FRF-PLL) for unbalanced line voltage conditions. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 4723–4728. [Google Scholar]
- Karimi-Ghartemani, M.; Mojiri, M.; Safaee, A.; Walseth, J.A.; Khajehoddin, S.A.; Jain, P.; Bakhshai, A. A New Phase-Locked Loop System for Three-Phase Applications. IEEE Trans. Power Electron. 2013, 28, 1208–1218. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Musavi, F.; Vasquez, J.C. Single-Phase Frequency-Locked Loops: A Comprehensive Review. IEEE Trans. Power Electron. 2019, 34, 11791–11812. [Google Scholar] [CrossRef]
- Rodríguez, P.; Luna, A.; Muñoz-Aguilar, R.S.; Etxeberria-Otadui, I.; Teodorescu, R.; Blaabjerg, F. A Stationary Reference Frame Grid Synchronization System for Three-Phase Grid-Connected Power Converters under Adverse Grid Conditions. IEEE Trans. Power Electron. 2012, 27, 99–112. [Google Scholar] [CrossRef]
- Yi, H.; Wang, X.; Blaabjerg, F.; Zhuo, F. Impedance Analysis of SOGI-FLL-Based Grid Synchronization. IEEE Trans. Power Electron. 2017, 32, 7409–7413. [Google Scholar] [CrossRef]
- He, X.; Geng, H.; Yang, G. A Generalized Design Framework of Notch Filter Based Frequency-Locked Loop for Three-Phase Grid Voltage. IEEE Trans. Ind. Electron. 2018, 65, 7072–7084. [Google Scholar] [CrossRef]
- Vazquez-Oviedo, E.I.; Vázquez, N.; Femat, R. Synchronization Technique of Grid-Connected Power Converters Based on a Limit Cycle Oscillator. IEEE Trans. Ind. Electron. 2017, 65, 709–717. [Google Scholar] [CrossRef]
- Rodriguez, P.; Luna, A.; Candela, I.; Mujal, R.; Teodorescu, R.; Blaabjerg, F. Multiresonant Frequency-Locked Loop for Grid Synchronization of Power Converters Under Distorted Grid Conditions. IEEE Trans. Ind. Electron. 2011, 58, 127–138. [Google Scholar] [CrossRef]
- Overney, F.; Mortara, A. Synchronization of sampling-based measuring systesm. IEEE Trans. Instrum. Meas. 2014, 63, 89–95. [Google Scholar] [CrossRef]
- Reza, S.; Ciobotaru, M.; Agelidis, V.G. Single-Phase Grid Voltage Frequency Estimation Using Teager Energy Operator-Based Technique. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 1218–1227. [Google Scholar] [CrossRef]
- Babu, B.C.; Sridharan, K.; Rosolowski, E.; Leonowicz, Z.M. Analysis of SDFT based phase detection system for grid synchronization of distributed generation systems. Eng. Sci. Technol. Int. J. 2014, 17, 270–278. [Google Scholar] [CrossRef]
- Retegui, R.G.; Gonzalez, S.A.; Funes, M.A.; Maestri, S. Implementation of a novel synchronization method using Sliding Goertzel DFT. In Proceedings of the 2007 IEEE International Symposium on Intelligent Signal Processing, Alcala de Henares, Spain, 3–5 October 2007. [Google Scholar] [CrossRef]
- Baradarani, F.; Zadeh, M.R.D.; Zamani, M.A. A Phase-Angle Estimation Method for Synchronization of Grid-Connected Power-Electronic Converters. IEEE Trans. Power Deliv. 2014, 30, 827–835. [Google Scholar] [CrossRef]
- Romano, P.; Paolone, M. Enhanced interpolated-DFT for synchrophasor estimation in FPGAs: Theory, implementation, and validation of a PMU prototype. IEEE Trans. Instrum. Meas. 2014, 63, 2824–2836. [Google Scholar] [CrossRef]
- Belega, D.; Macii, D.; Petri, D. Fast Synchrophasor Estimation by Means of Frequency-Domain and Time-Domain Algorithms. IEEE Trans. Instrum. Meas. 2013, 63, 388–401. [Google Scholar] [CrossRef]
- Song, H.-S.; Nam, K. Instantaneous phase-angle estimation algorithm under unbalanced voltage-sag conditions. IEE Proc. Gener. Transm. Distrib. 2000, 147, 409–415. [Google Scholar] [CrossRef]
- Chen, C.-I. A Phasor Estimator for Synchronization Between Power Grid and Distributed Generation System. IEEE Trans. Ind. Electron. 2013, 60, 3248–3255. [Google Scholar] [CrossRef]
- Kusljevic, M.D.; Tomic, J.J.; Jovanovic, L.D. Frequency Estimation of Three-Phase Power System Using Weighted-Least-Square Algorithm and Adaptive FIR Filtering. IEEE Trans. Instrum. Meas. 2009, 59, 322–329. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Weiss, G. Synchronverters: Inverters That Mimic Synchronous Generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Bevrani, H.; Ise, T.; Miura, Y. Virtual synchronous generators: A survey and new perspectives. Int. J. Electr. Power Energy Syst. 2014, 54, 244–254. [Google Scholar] [CrossRef]
- Belila, A.; Amirat, Y.; Benbouzid, M.; Berkouk, E.M.; Yao, G. Virtual synchronous generators for voltage synchronization of a hybrid PV-diesel power system. Int. J. Electr. Power Energy Syst. 2020, 117, 105677. [Google Scholar] [CrossRef]
- Wang, X.; Chen, L.; Sun, D.; Zhang, L.; Nian, H. A Modified Self-Synchronized Synchronverter in Unbalanced Power Grids with Balanced Currents and Restrained Power Ripples. Energies 2019, 12, 923. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of Control and Grid Synchronization for Distributed Power Generation Systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | Advantages | Shortcomings |
|---|---|---|
| PI [43] | Straightforward implementation. A zero steady-state error in the dq reference frame. | Performance degrades under distorted condition. Displays steady-state error in an unbalanced system. |
| PR [50] | Robust performance during disturbances. No excessive computational required. Relatively zero steady-state error. | Frequency variation sensitivity. Harmonics regulation difficulty. |
| DB | Accurate current reference tracking within zero error. Closed-loop stability compensation. Fast transient response with lower THD. | Vulnerable to model uncertainties and parameter mismatch. High THD in nonlinear load. |
| H [55,57] | Fast transient response. A robust operation against load variations. Straightforward implementation. | Resonance problems in high switching frequency. Prone to harmonics issues. |
| P [67,68] | Obtains a swift transient response. Involves less switching frequency. Provides accurate tracking with low THD. | Vulnerable to parameter variations. High computational burden. A precise filter model is vital. |
| SMC [62,69] | A robust and dynamic response. Decent performance in adaptivity under parameter changes. Excellent disturbance rejection. | Experiences a chattering phenomenon. Requires excessive computational operation. |
| H∞ [70] | Robust performance in both linear and nonlinear loads. Fast response with deficient THD issues. Reduced tracking error. | High computational burden. Relatively slow dynamics. |
| Technique | Advantages | Shortcomings |
|---|---|---|
| Droop-based [79,80] | Straightforward implementation. No critical communication line is required. Significant reliability and flexibility of operations. | Inaccurate power sharing. Performance degrades under nonlinear load and unbalanced conditions. Relatively slow in transient response. |
| Virtual impedance [83,88] | Fast transient response. Improved current harmonics sharing. Better output voltage with low THD. Excellent voltage and frequency regulation. Better dynamic response. | Relatively poor active and reactive power sharing performance. If the line impedance of the parallel inverters is mismatched, transformation angles will differ and not be synchronized. |
| Adaptive droop [89,90] | Decent transient response. Good active power sharing. Compensates circulating current. Better voltage and frequency adjustment. Enhances power sharing accuracy and system stability. | Sophisticated implementation. High computational burden. Sluggish dynamic response. |
| Robust droop [97,101] | Ensures dynamic stability. Better voltage and frequency adjustment. Robust dynamic performance against load variations. | Relatively poor reactive power sharing performance. Involves high THD in current components. |
| Non-droop- based [106,112,115] | Power sharing enhancement. Straightforward implementation. Improves the dynamic stability of power sharing and quality. Robustness in parametric variation (system and controlled). | Slow dynamic performance. Performance degrades when communication malfunctions at a single point. Communication line increases capital and maintenance cost. |
| Controller | Advantages | Drawbacks |
|---|---|---|
| Centralized [66] | All the decision making, collaboration, and prioritization are achieved more efficiently when information is collected at a single point through the central controller. Provides fast and effective process, while retaining accurate power sharing. | Performance degrades when failure occurs at a single point of communication. Communication links among devices offer unreliable operation in terms of maintenance and cost considerations. |
| Distributed consensus [116,118] | Increases flexibility and reliability of the microgrid system without taking line impedance consideration. More reliable and has accurate restorations process. | Sophisticated implementation. High computational burden. |
| Event-triggered [121,123] | Able to maintain superior closed-loop stability and performance. Effectively updates voltage and frequency to nominal values. | High computational burden. Requires a new switch mechanism, which increases malfunction factor. |
| Controller | Advantages | Drawbacks |
|---|---|---|
| PLL | Provides accurate synchronization. Better for grid harmonics and noise rejection. Simple implementation. | Vulnerable in high grid faults. In unsymmetrical voltage faults, the second harmonics appear from the negative sequence that propagates through the PLL system and affects the extracted phase angle. |
| FLL | Immune to phase angle and frequency shifts, harmonics, and uncertainty parameters. Offers reliability under frequency variations, harmonics, and unbalanced voltage. | High computational burden. The overall controller design becomes complex. |
| DFT | Provides robust phase tracking with fast transient under highly polluted grid. Accurate synchronization even under noise occurrence. | Vulnerable to unbalanced conditions. Phase shift occurs when the sampling is asynchronous with the leading network. |
| WLSE | Faster and effective in updating frequency and phase angle fault conditions. Simple and easy to implement. | The estimator takes a longer time interval in detecting frequency changes. |
| S | Reduces the computational burden. Simplifies the overall controller by the withdrawal of the synchronization unit. Provides accurate synchronization process. | Vulnerable to unbalanced and distorted grid voltages. Stability and control parameter tuning is considerably difficult. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jackson, R.; Zulkifli, S.A.; Benbouzid, M.; Salimin, S.; Khan, M.H.; Elhassan, G.; Pathan, E. A Comprehensive Motivation of Multilayer Control Levels for Microgrids: Synchronization, Voltage and Frequency Restoration Perspective. Appl. Sci. 2020, 10, 8355. https://doi.org/10.3390/app10238355
Jackson R, Zulkifli SA, Benbouzid M, Salimin S, Khan MH, Elhassan G, Pathan E. A Comprehensive Motivation of Multilayer Control Levels for Microgrids: Synchronization, Voltage and Frequency Restoration Perspective. Applied Sciences. 2020; 10(23):8355. https://doi.org/10.3390/app10238355
Chicago/Turabian StyleJackson, Ronald, Shamsul Aizam Zulkifli, Mohamed Benbouzid, Suriana Salimin, Mubashir Hayat Khan, Garba Elhassan, and Erum Pathan. 2020. "A Comprehensive Motivation of Multilayer Control Levels for Microgrids: Synchronization, Voltage and Frequency Restoration Perspective" Applied Sciences 10, no. 23: 8355. https://doi.org/10.3390/app10238355
APA StyleJackson, R., Zulkifli, S. A., Benbouzid, M., Salimin, S., Khan, M. H., Elhassan, G., & Pathan, E. (2020). A Comprehensive Motivation of Multilayer Control Levels for Microgrids: Synchronization, Voltage and Frequency Restoration Perspective. Applied Sciences, 10(23), 8355. https://doi.org/10.3390/app10238355