Improvement of Electric Propulsion System Model for Performance Analysis of Large-Size Multicopter UAVs


Abstract
:1. Introduction
2. Related Works
3. Electric Propulsion System for Multicopter UAVs
4. Mathematical Model
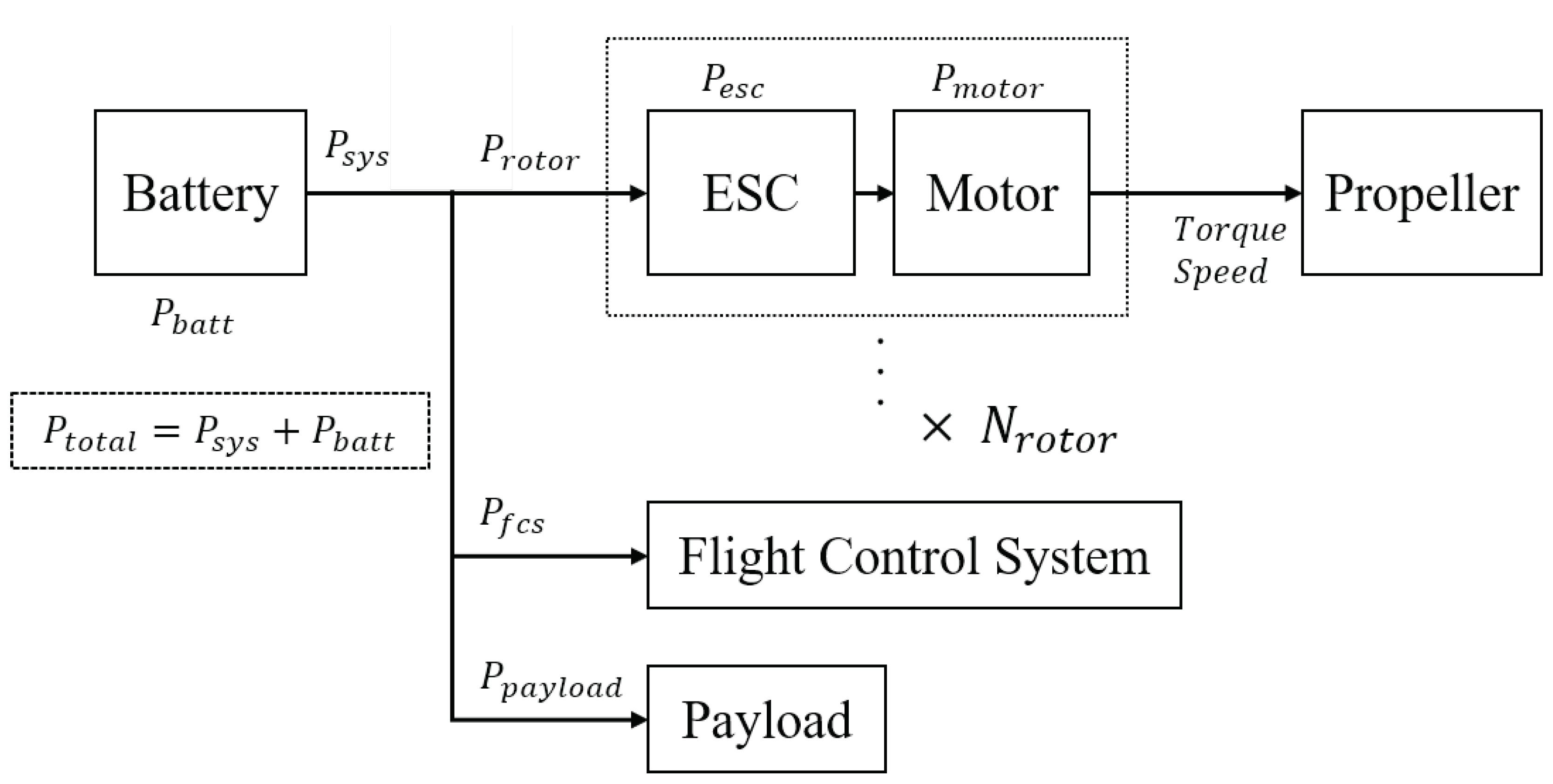
4.1. System Power Chain
4.2. Propeller
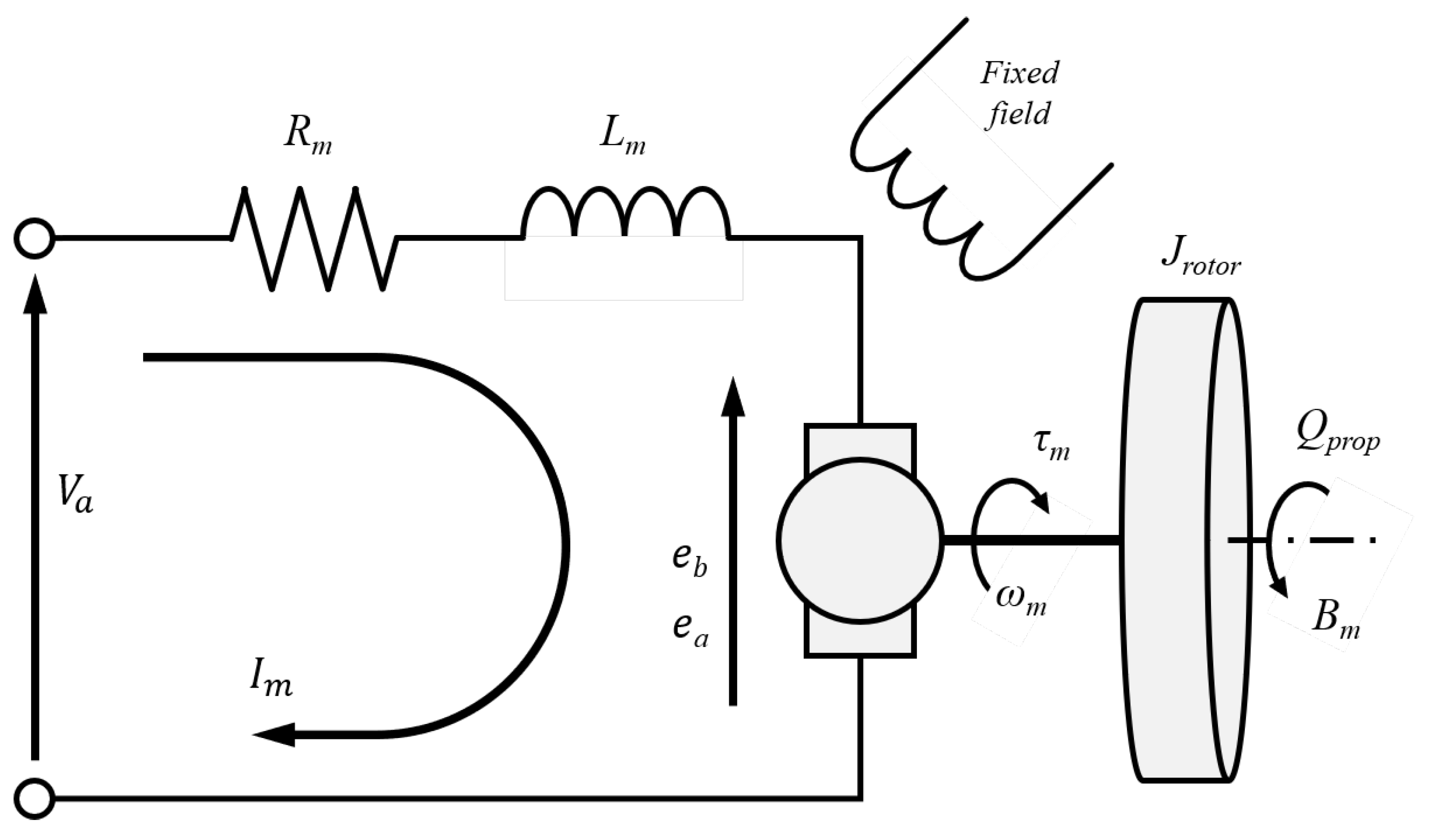
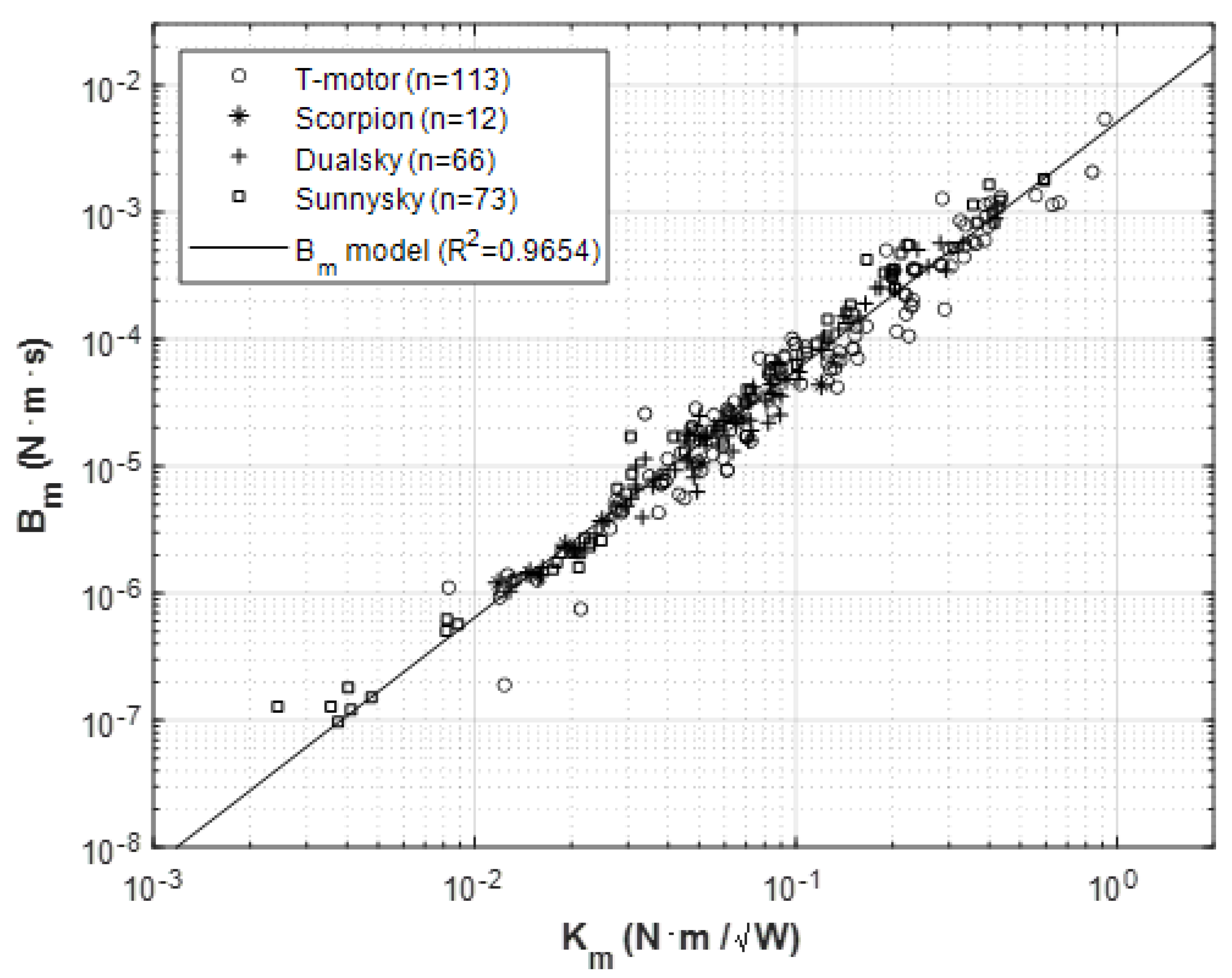
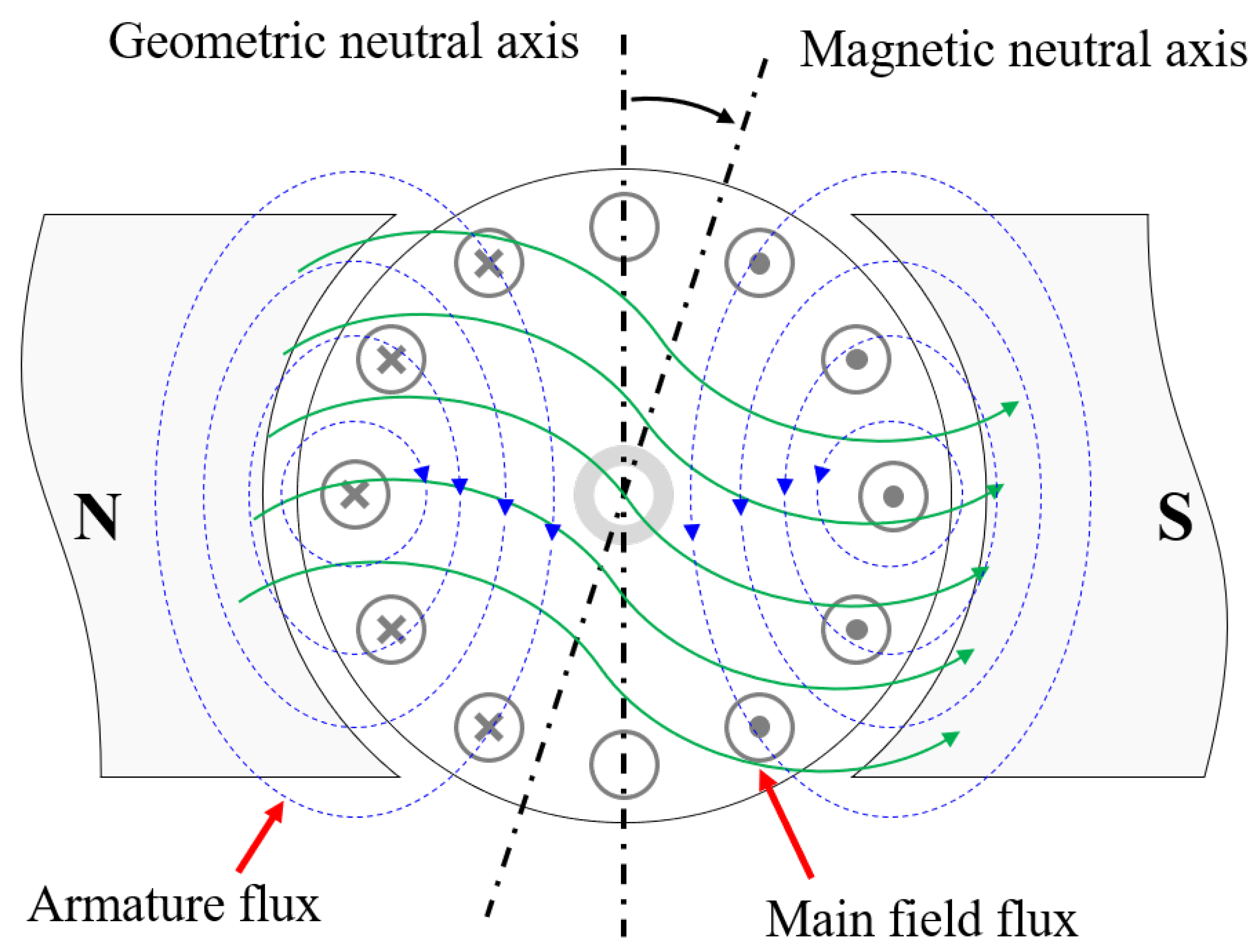
4.3. Motor
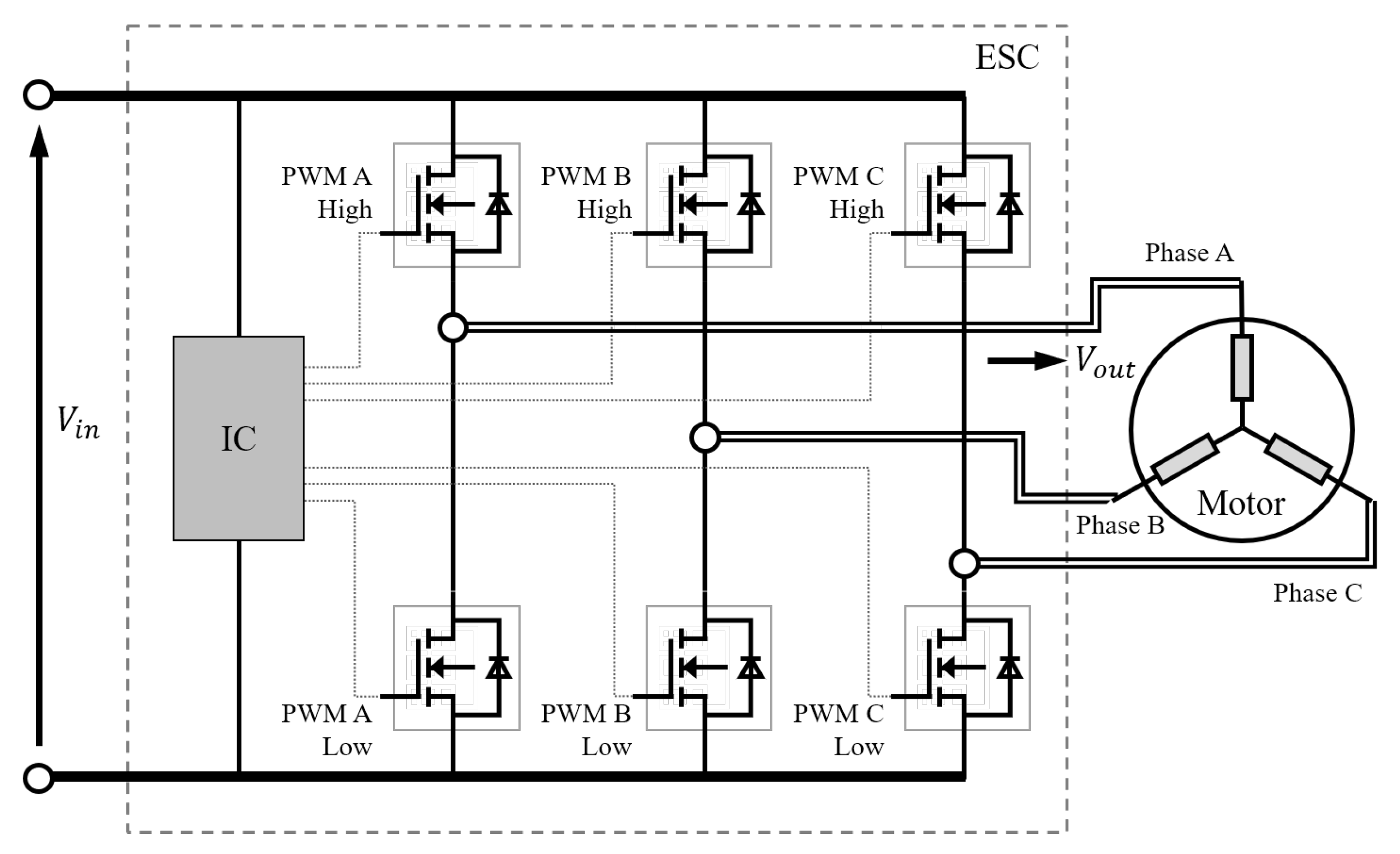
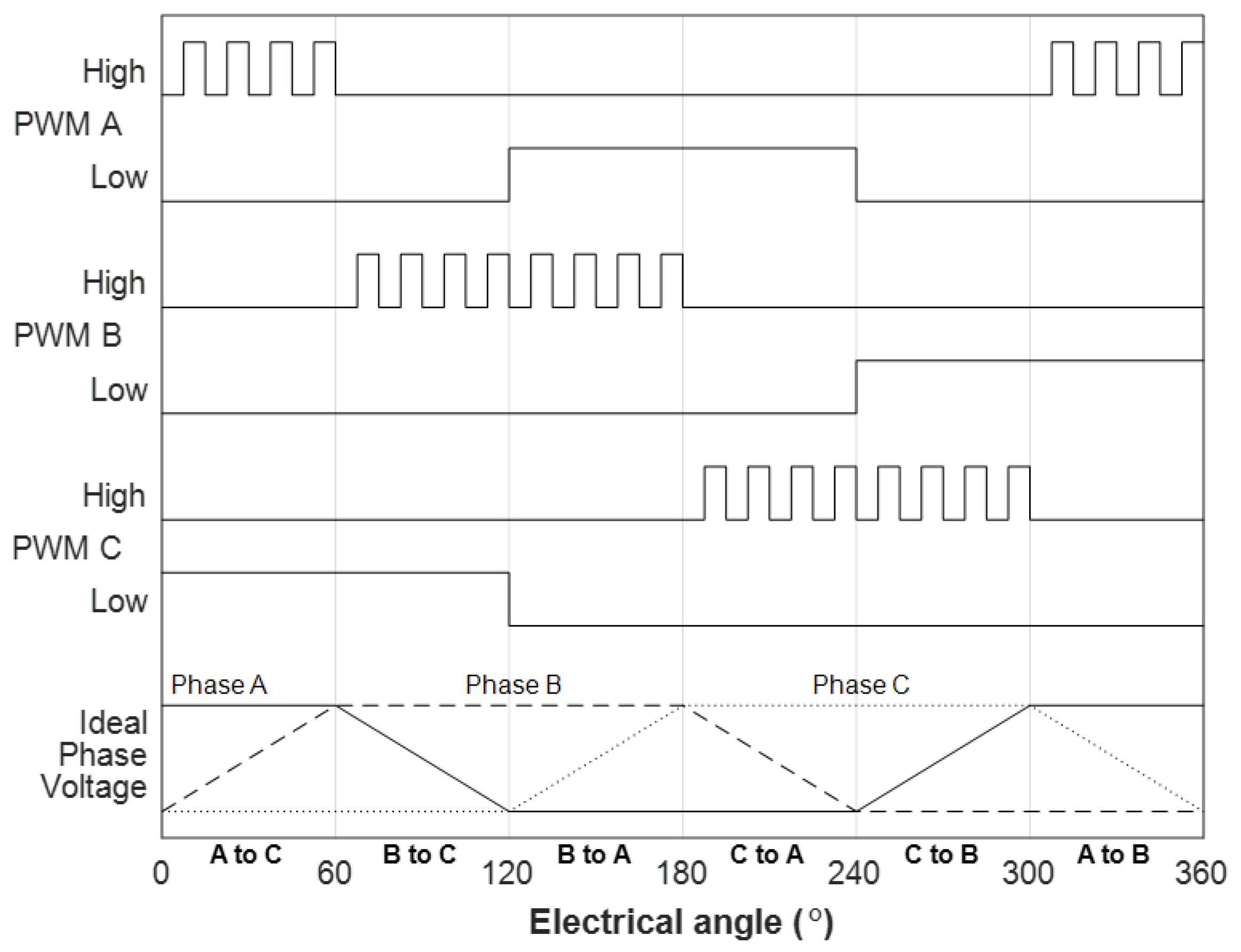
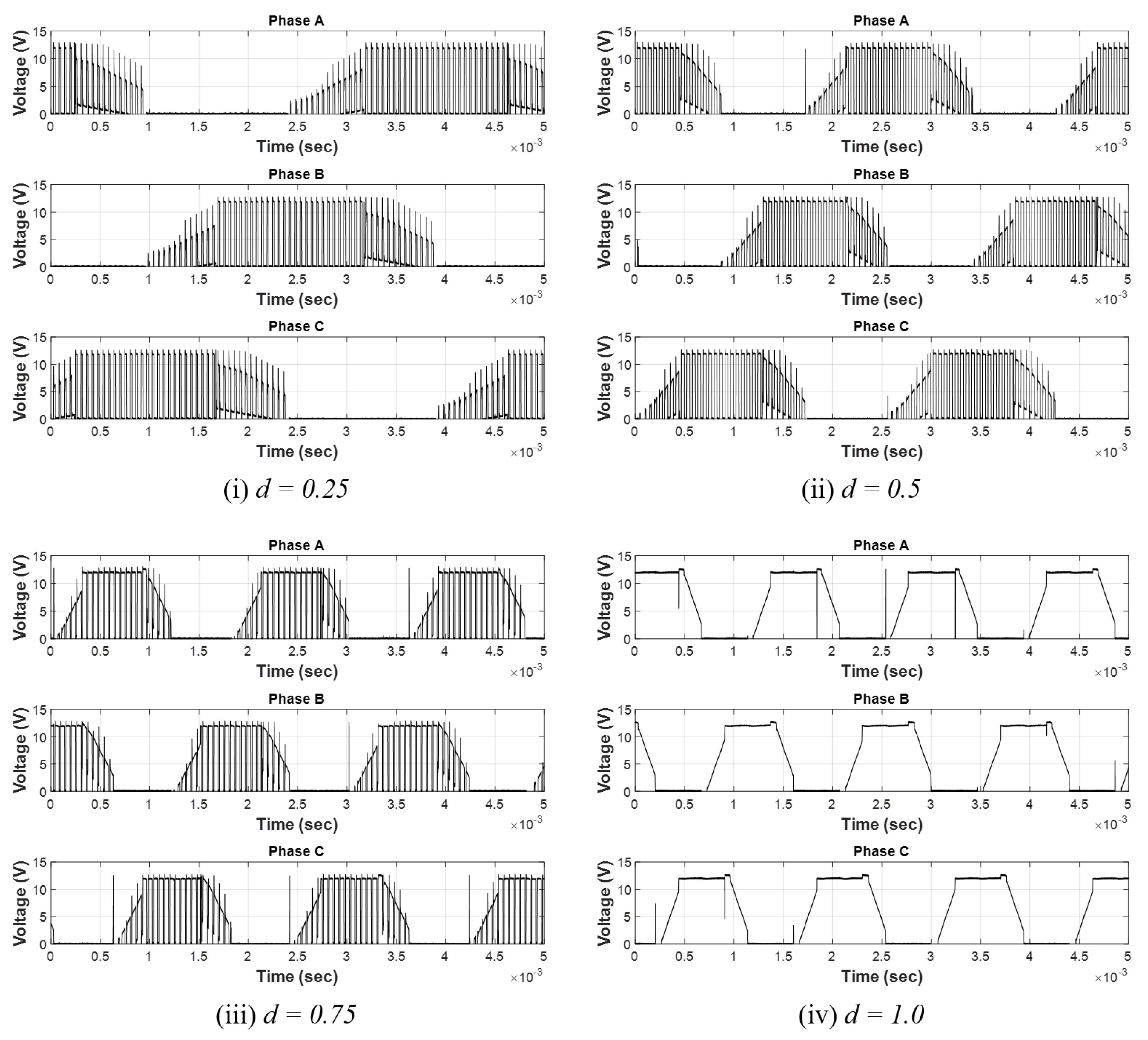
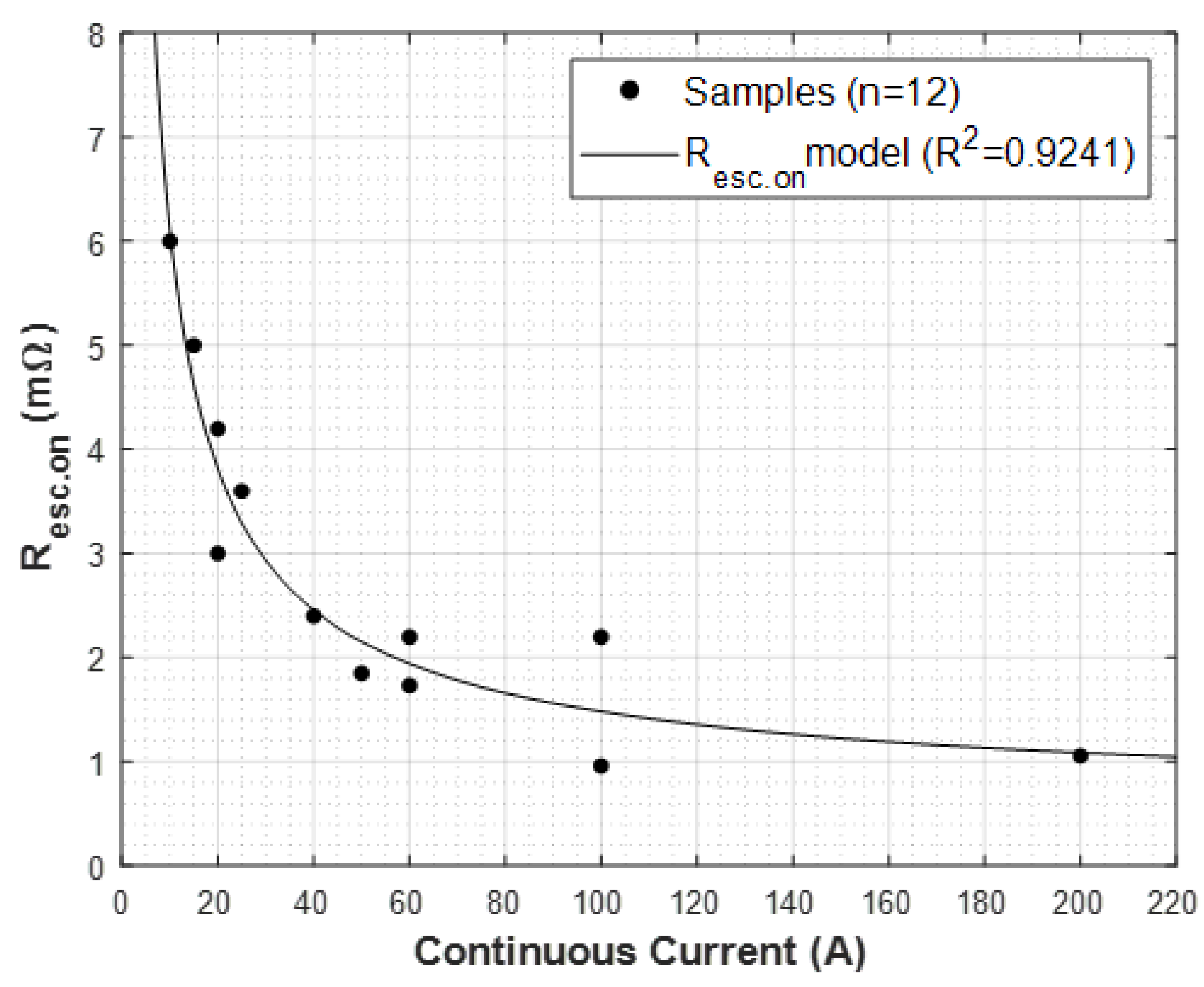
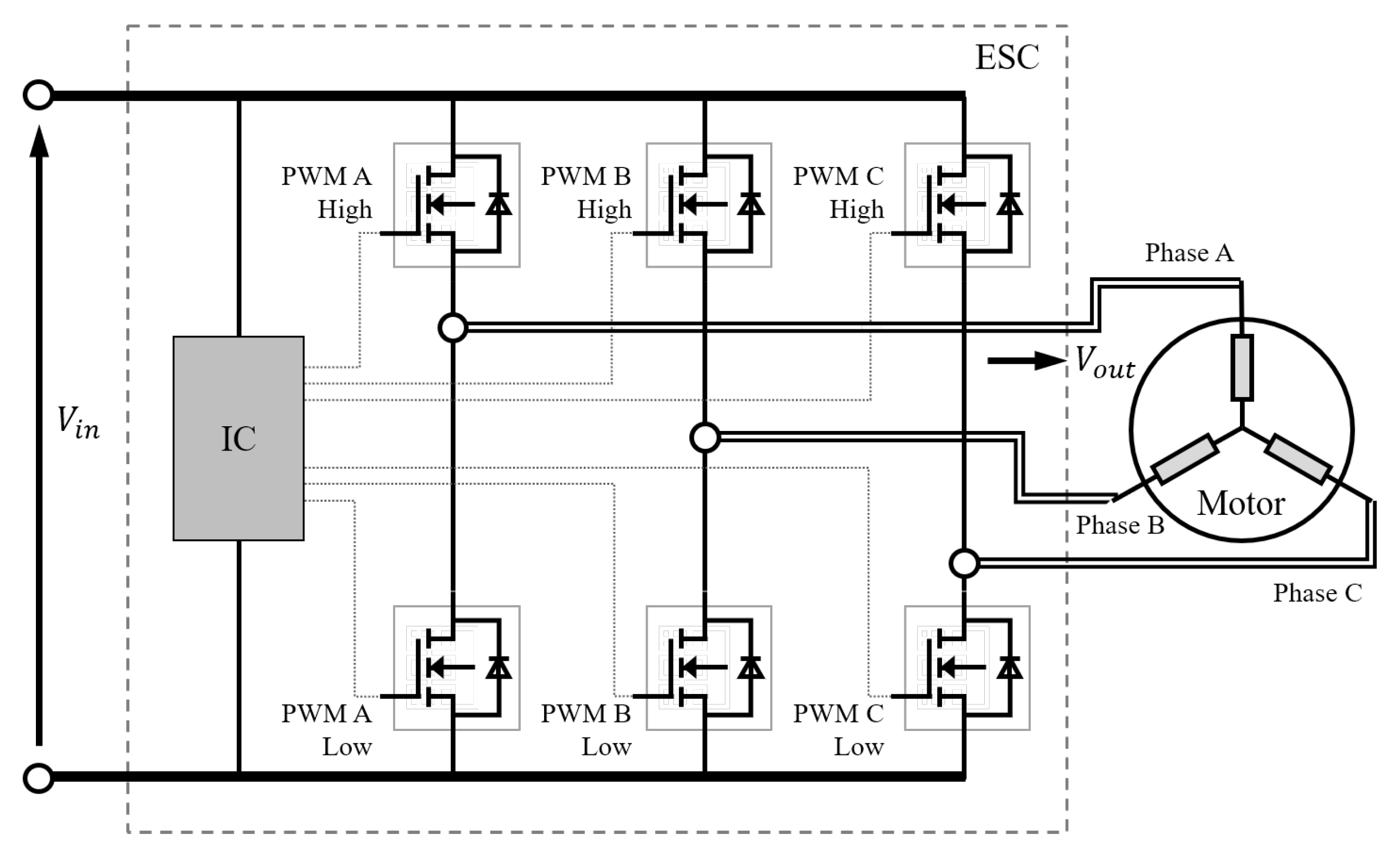
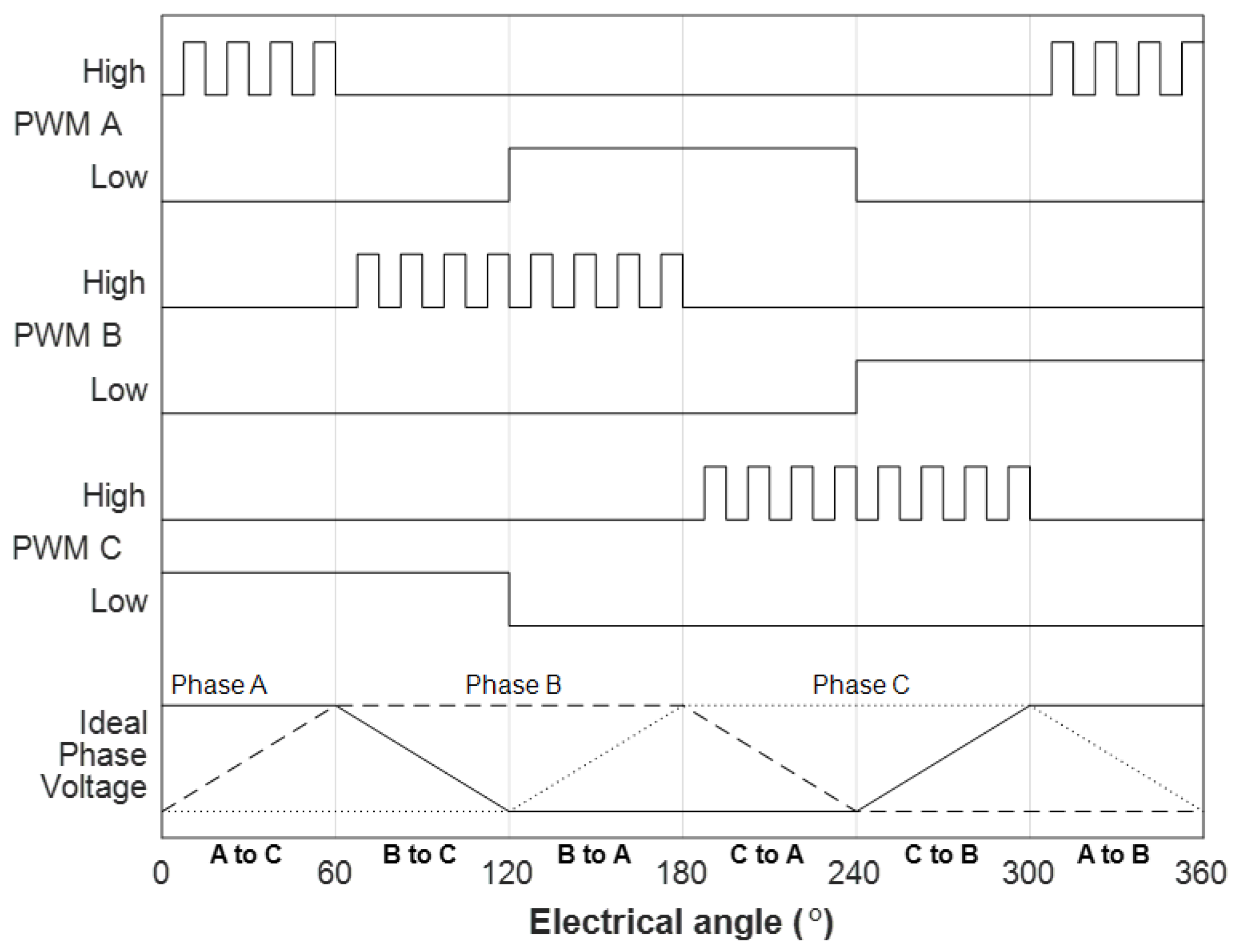
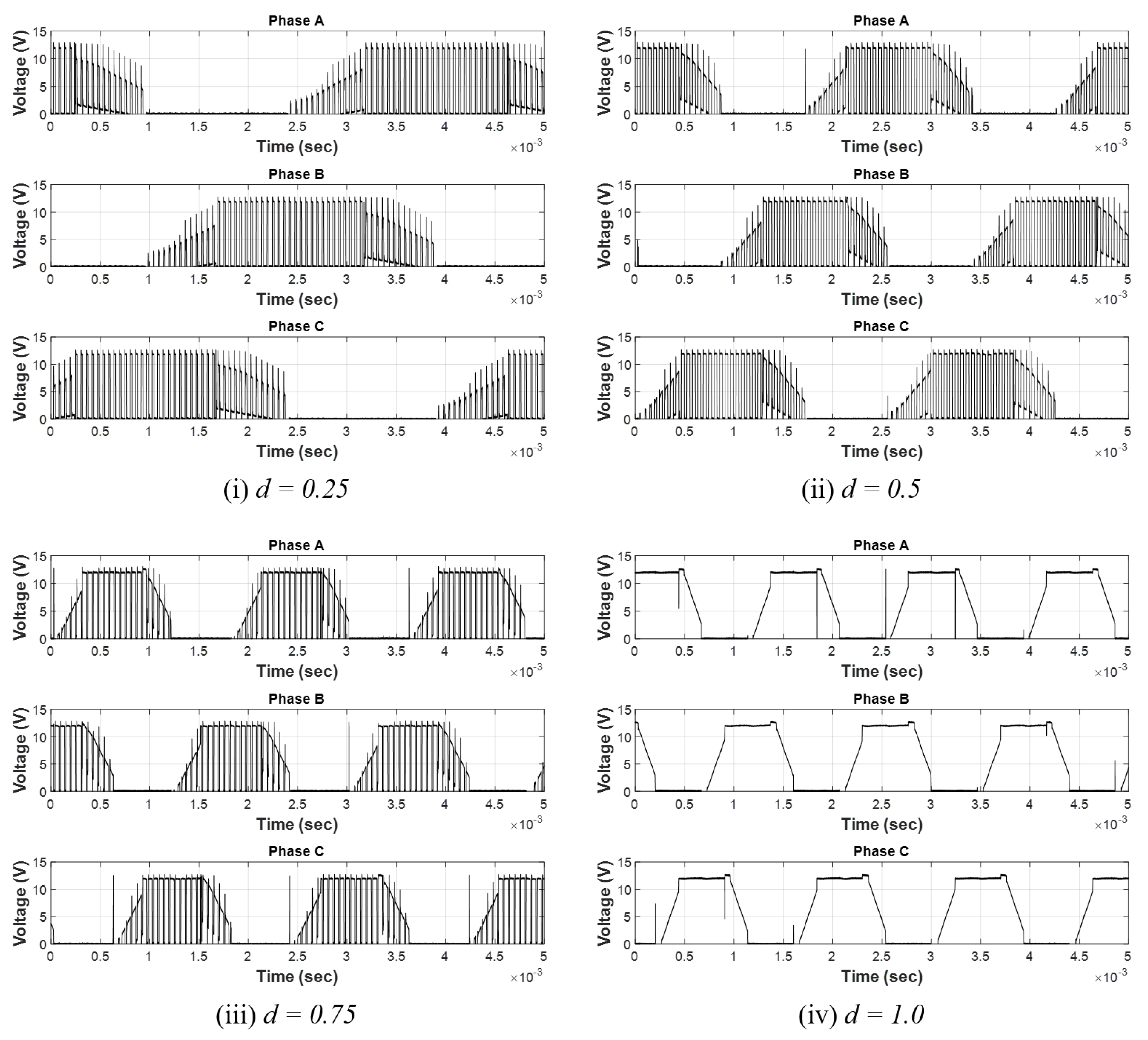
4.4. ESC
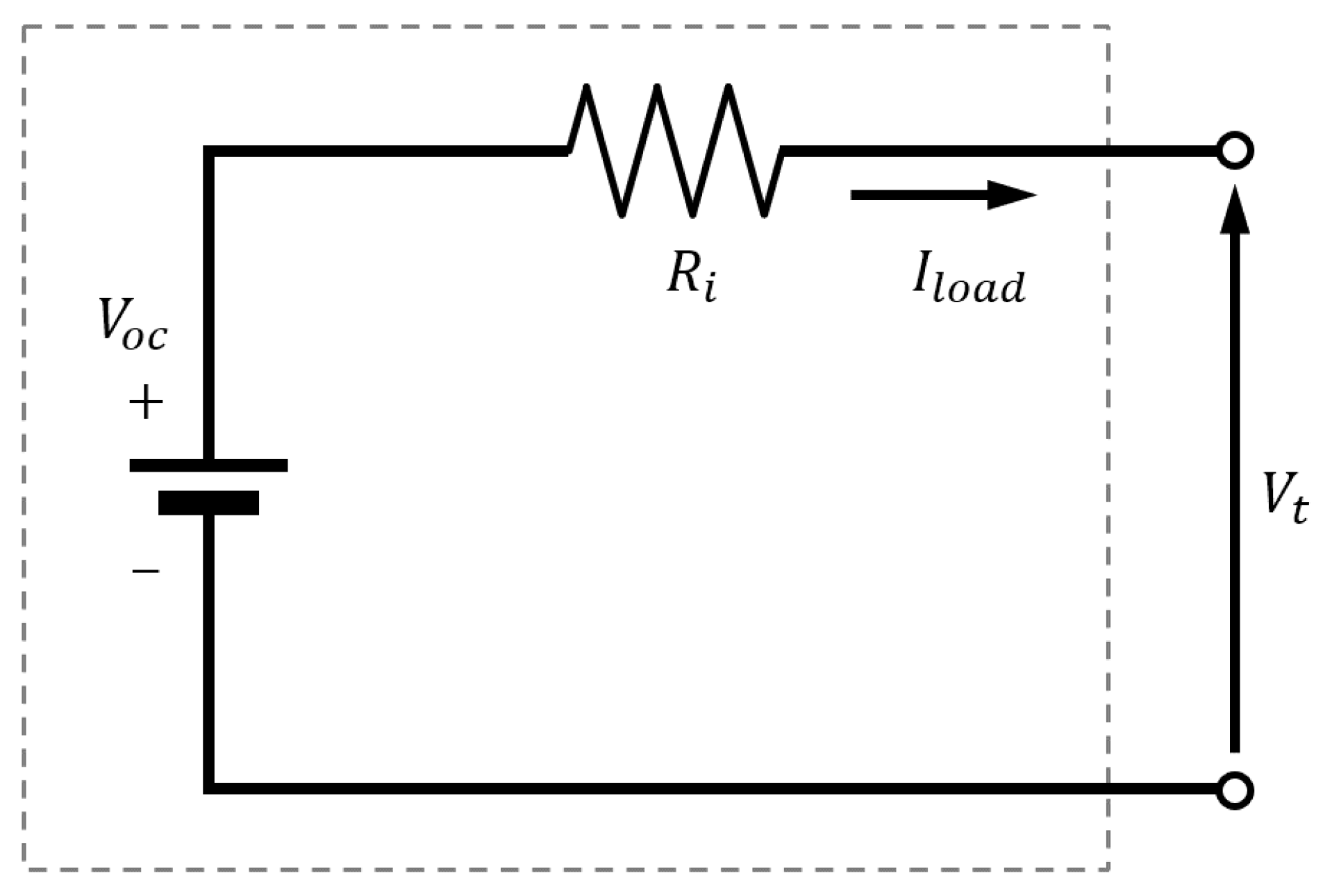
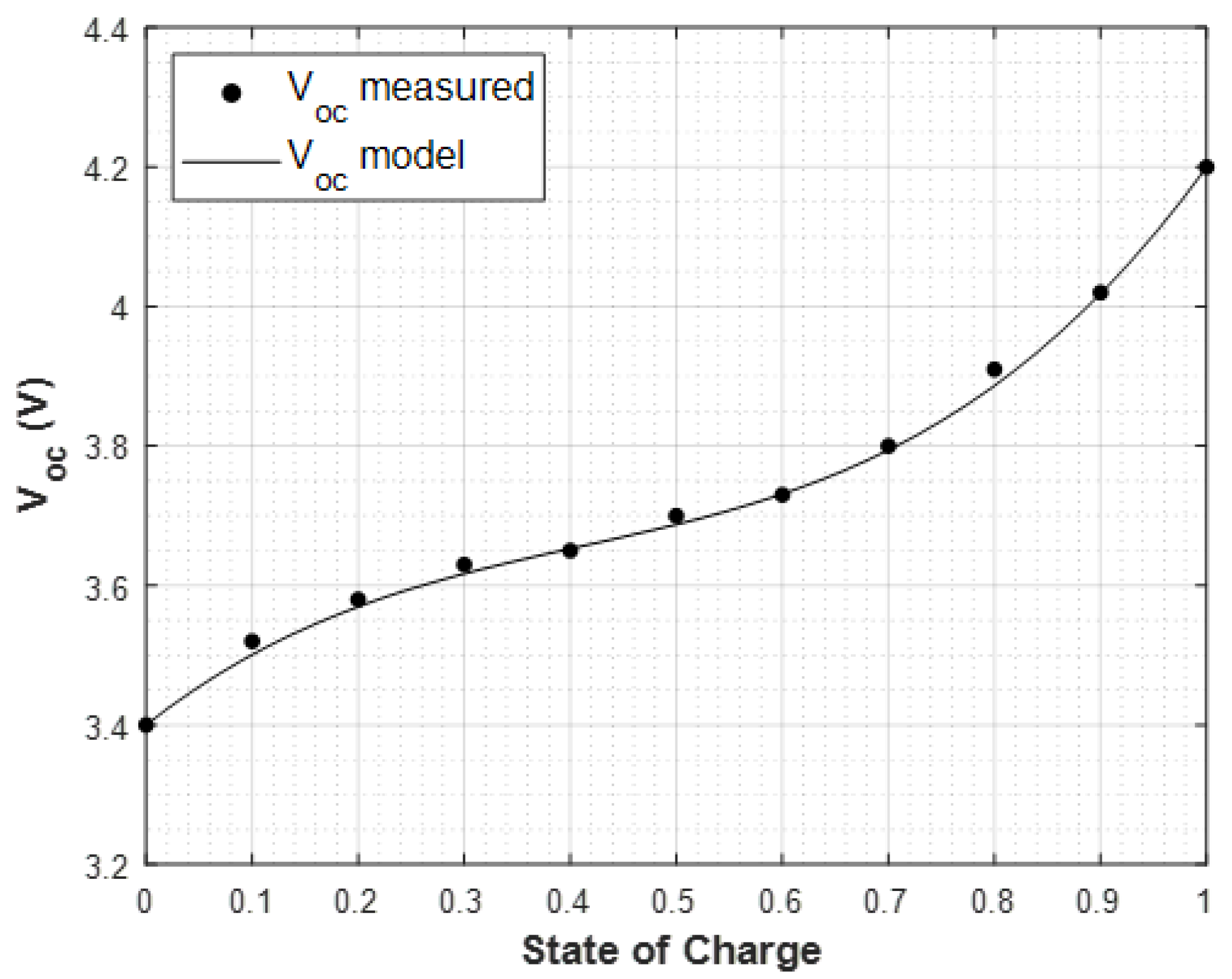
4.5. Battery
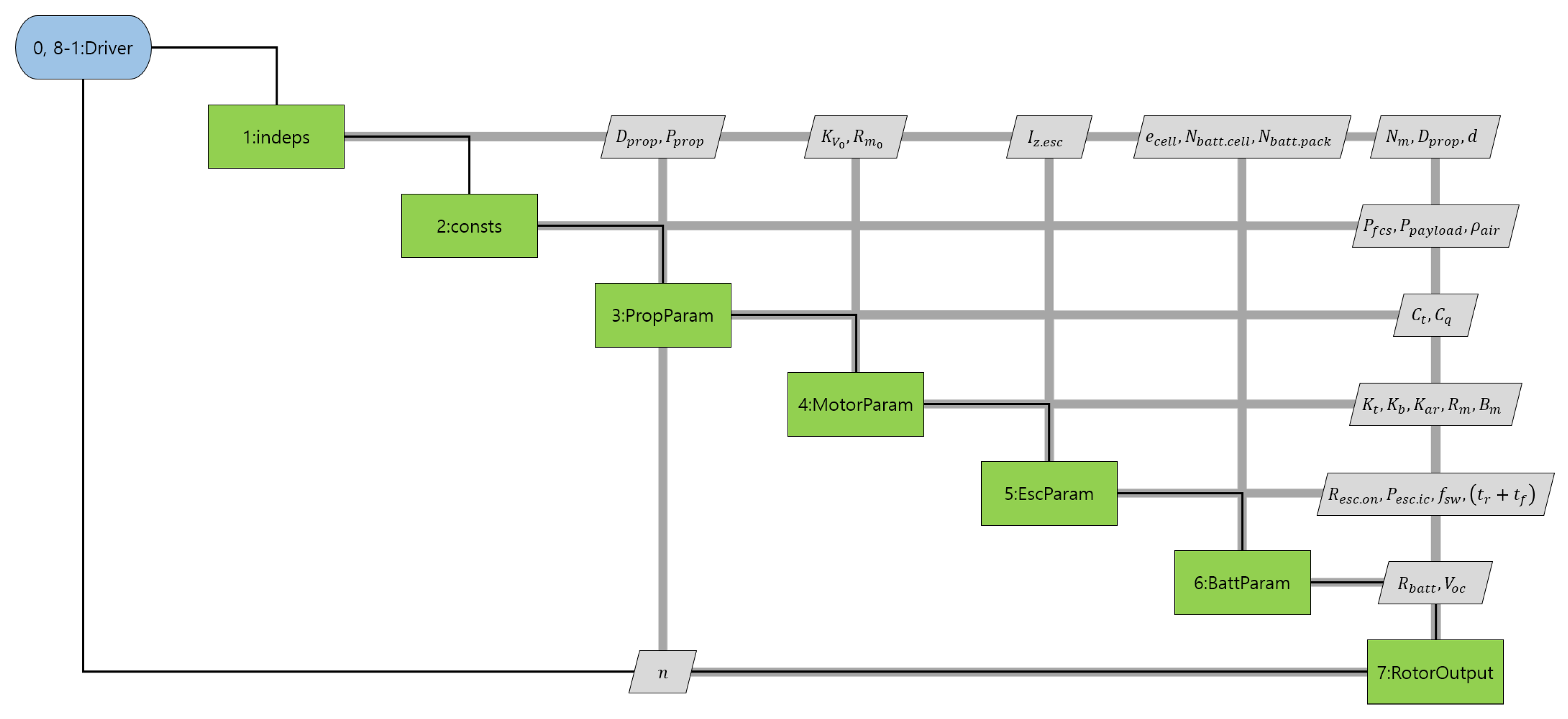
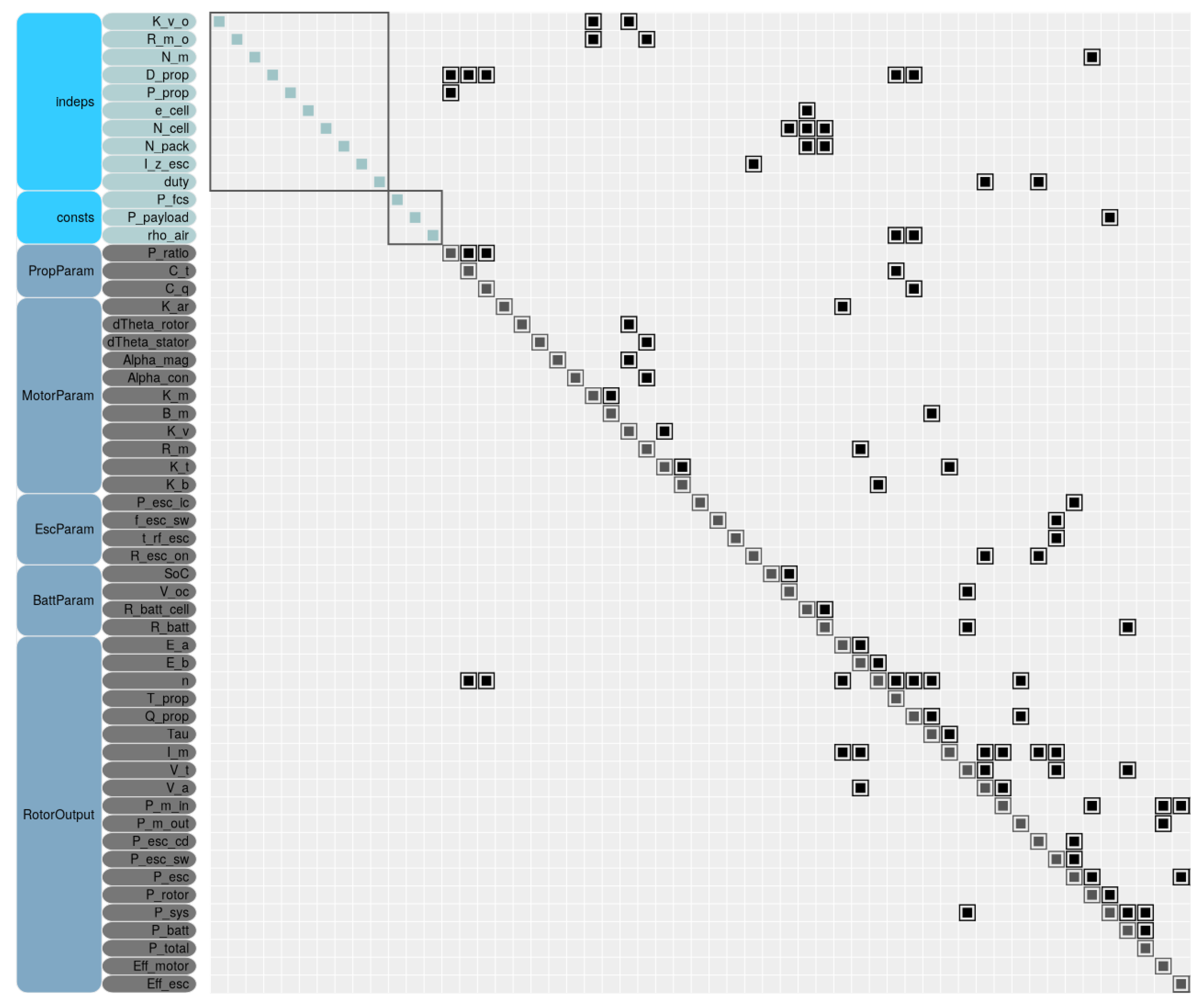
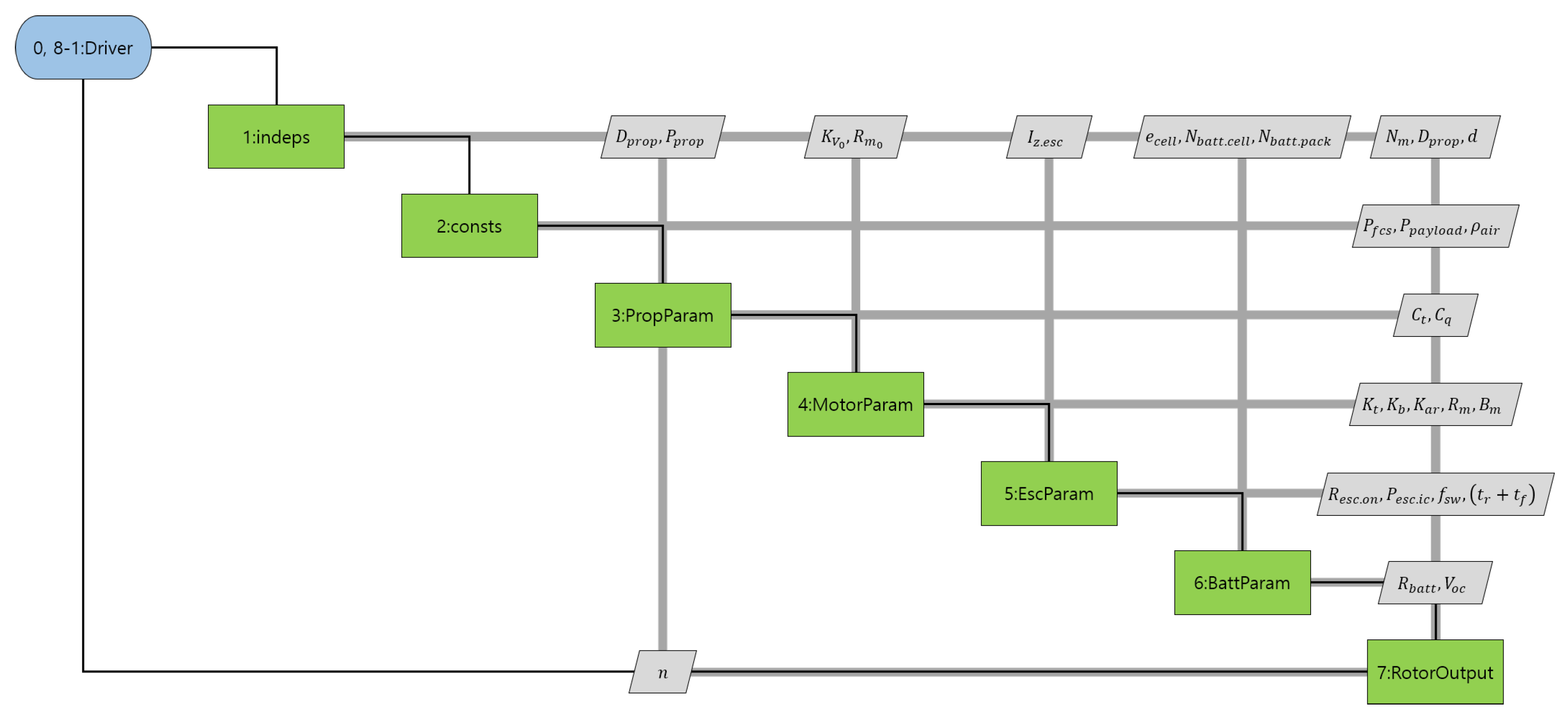
5. Model Implementation
6. Model Validation
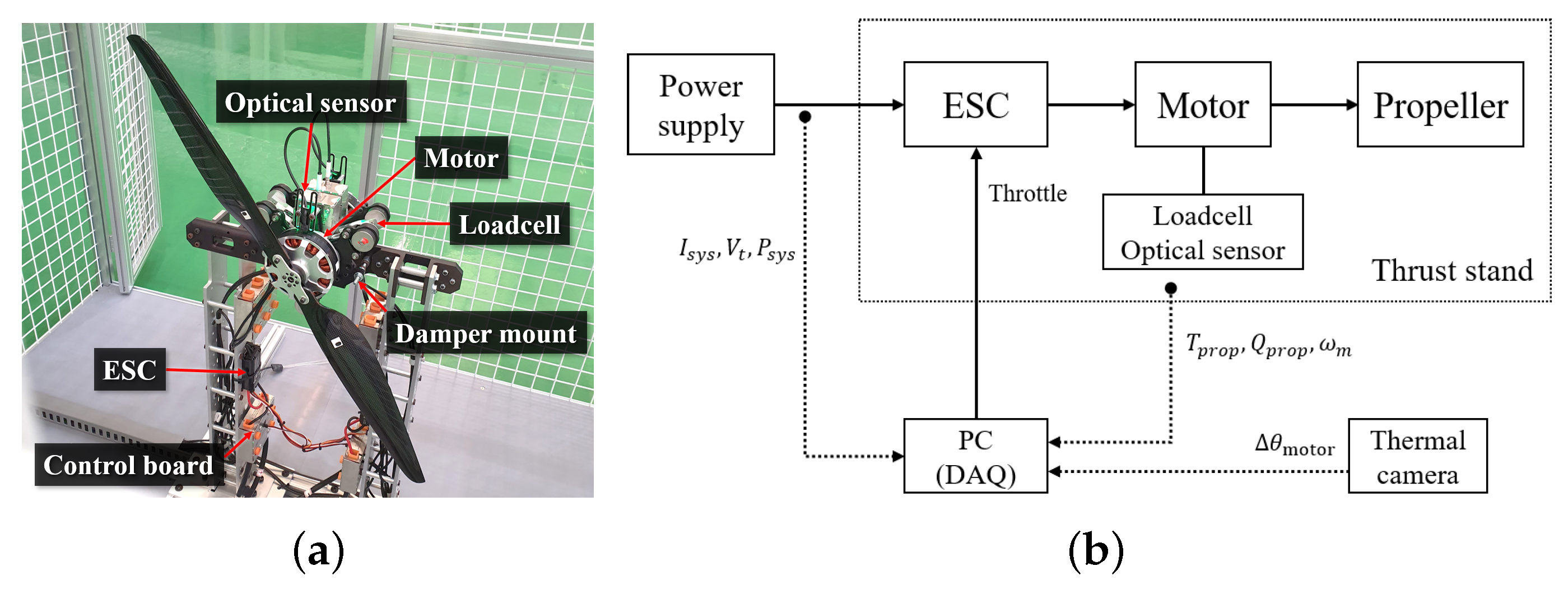
6.1. Experiment
6.1.1. Method
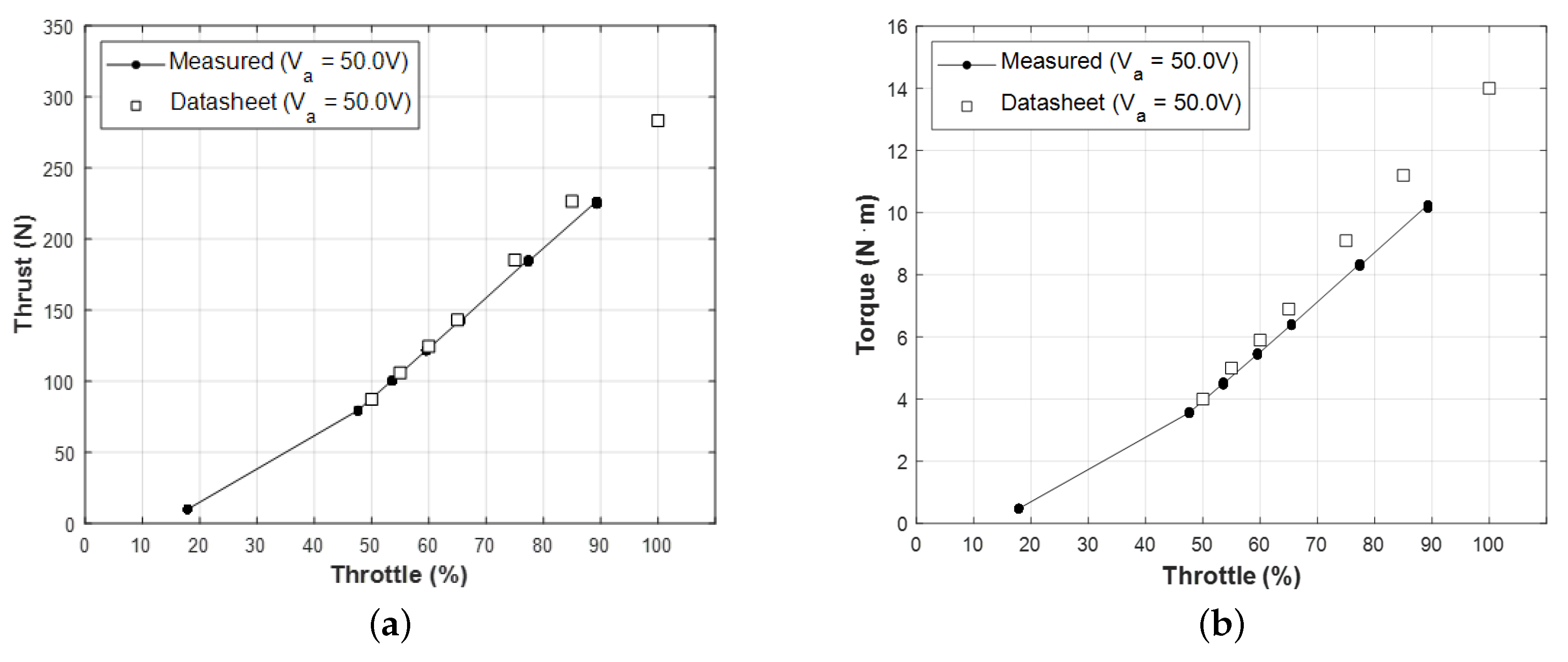
6.1.2. Result
6.2. Model Parameter Estimation
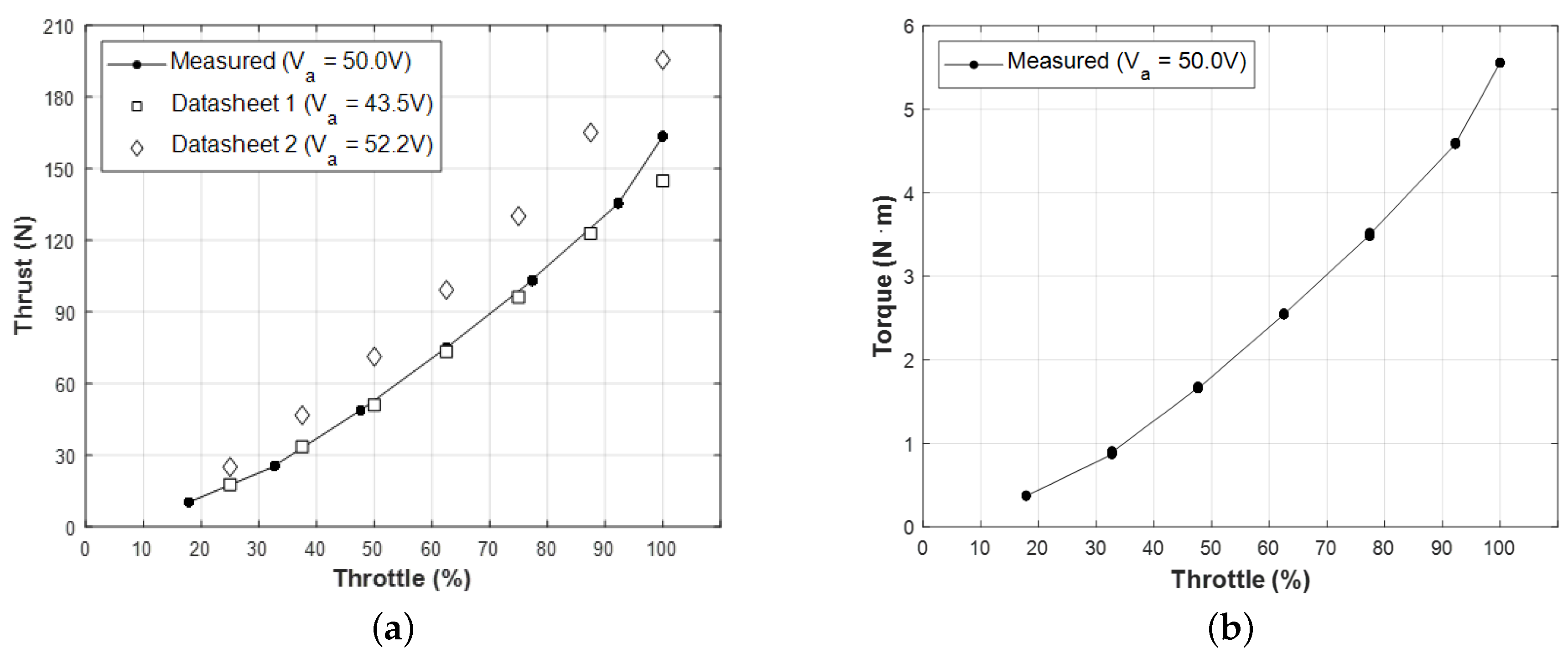
6.2.1. Propeller Thrust and Torque Coefficient
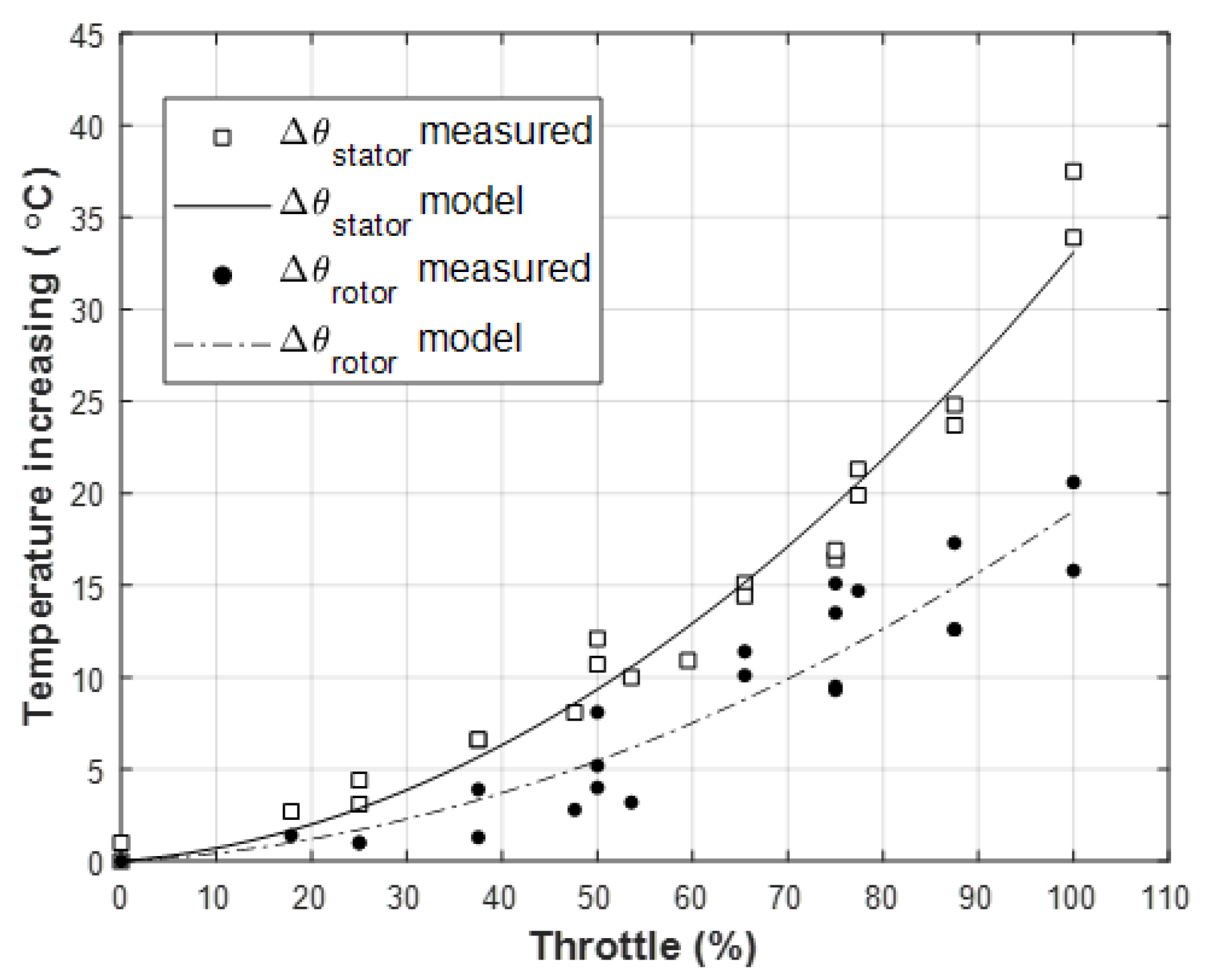
6.2.2. Motor Thermal Profile
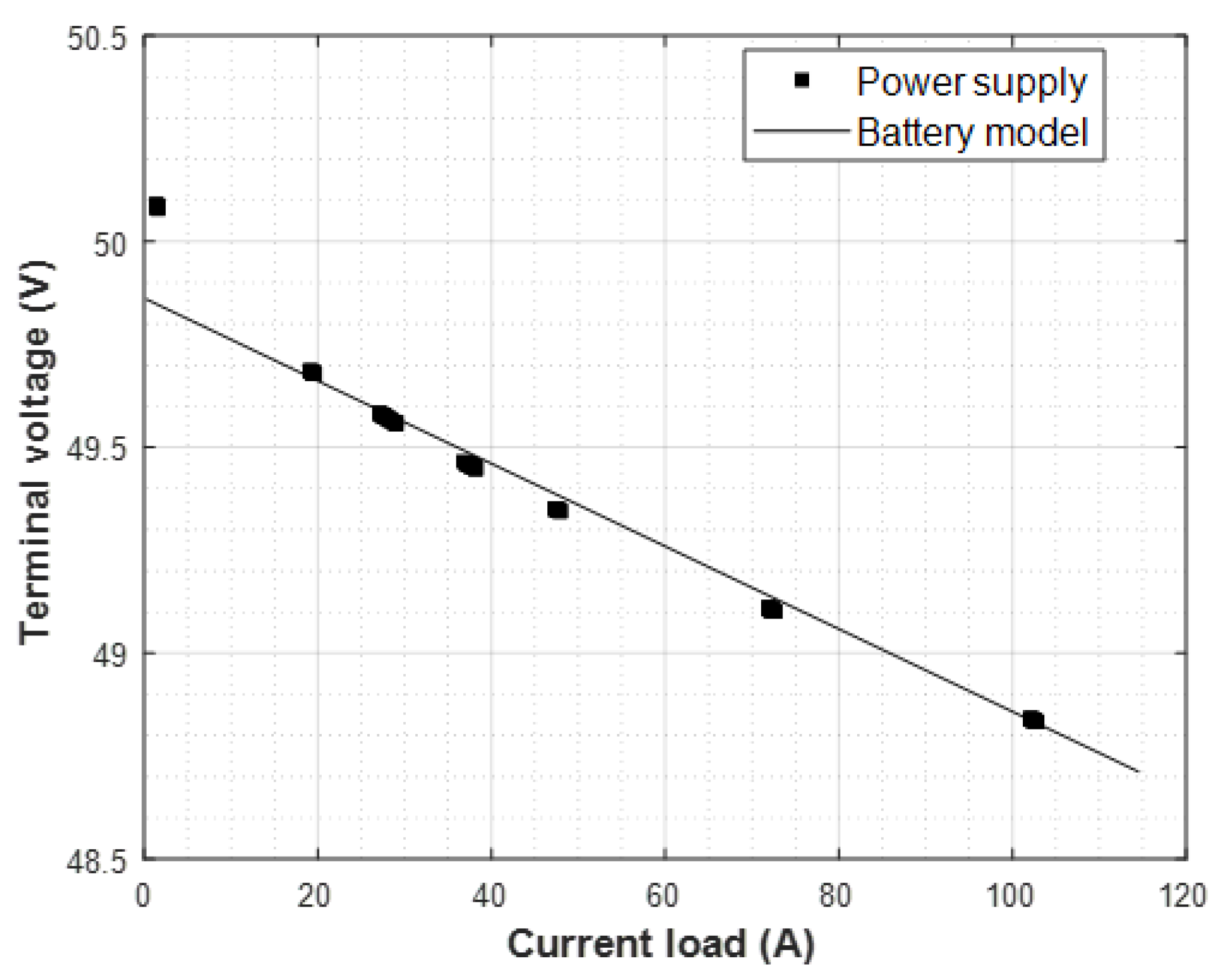
6.2.3. Battery Model
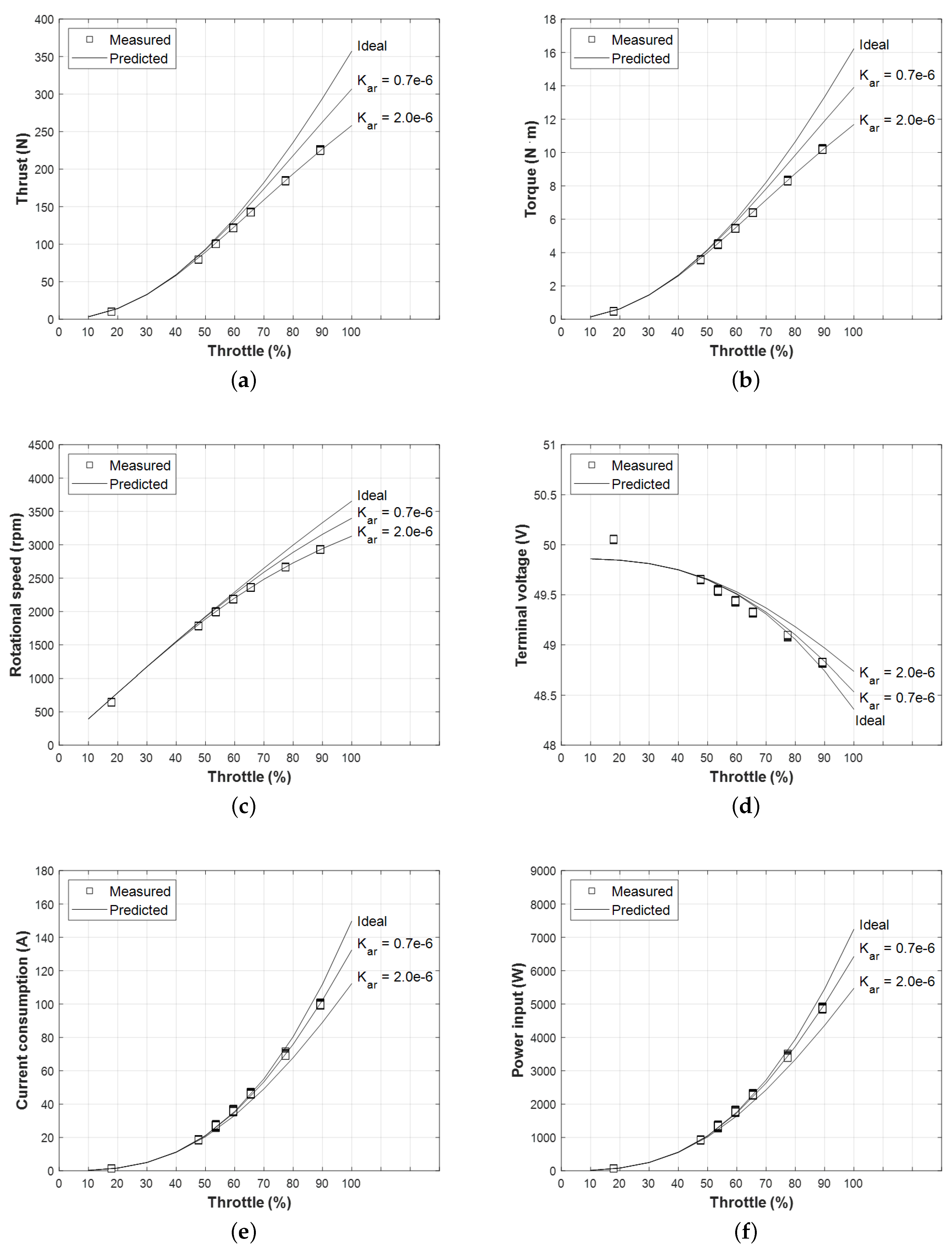
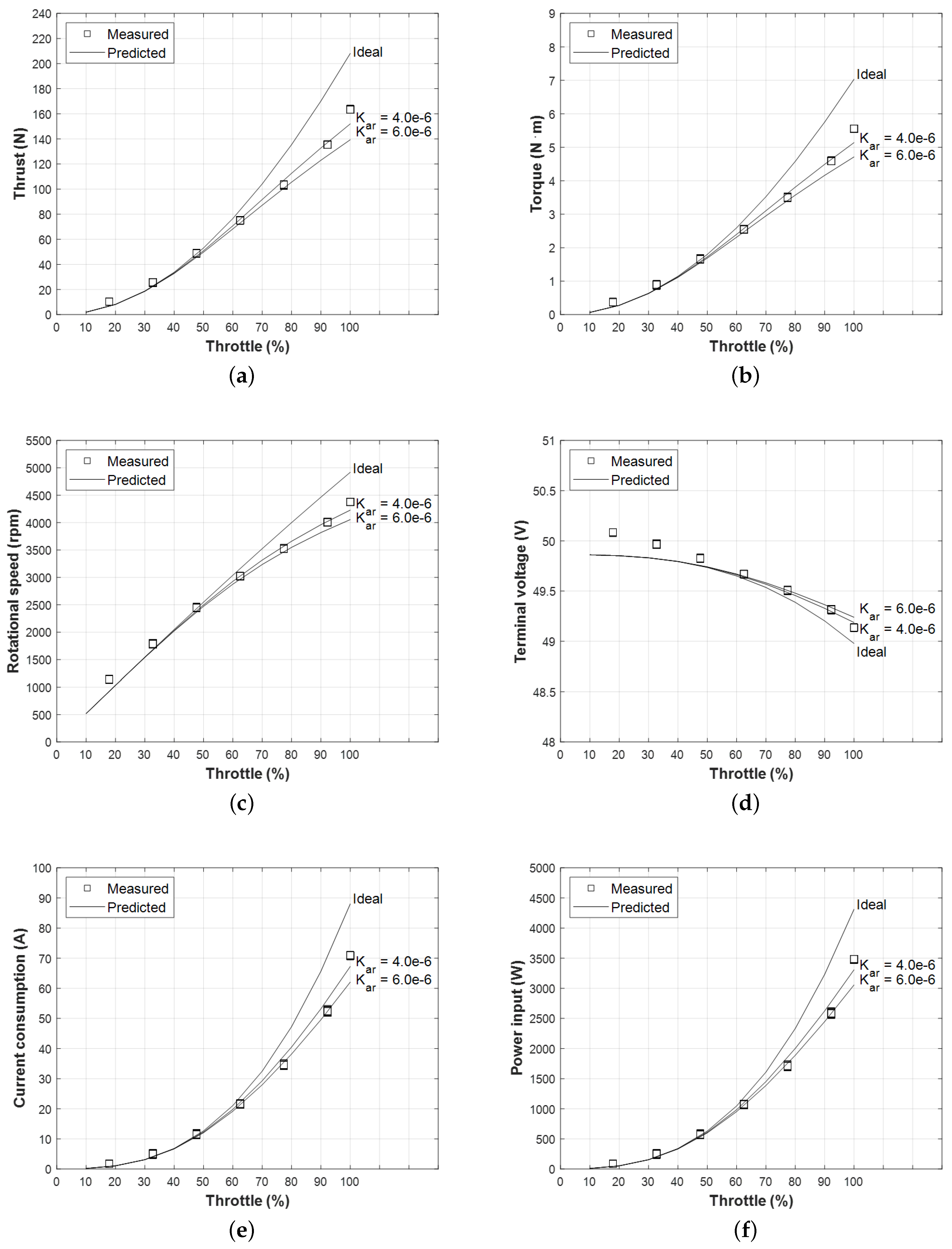
6.3. Performance Prediction Using the Proposed Model
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ehang. UAM—Passenger Autonomous Aerial Vehicle (AAV). 2020. Available online: https://www.ehang.com/ehangaav (accessed on 21 September 2020).
- Volocopter. Volocity. 2020. Available online: https://www.volocopter.com/en/product/ (accessed on 21 September 2020).
- Airbus. CityAirbus—Urban Air Mobility. 2020. Available online: https://www.airbus.com/innovation/zero-emission/urban-air-mobility/cityairbus.html (accessed on 21 September 2020).
- Austin, R. Unmanned Aircraft Systems: UAVS Design, Development and Deployment; John Wiley & Sons: Hoboken, NJ, USA, 2011; Volume 54. [Google Scholar]
- Hanselman, D.C. Brushless Permanent Magnet Motor Design; McGraw-Hill: New York, NY, USA, 2003. [Google Scholar]
- Jeong, J.; Byun, Y.; Song, W.; Kang, B. Study on Performance Prediction of Electric Propulsion System for Multirotor UAVs. J. Korean Soc. Precis. Eng. 2016, 33, 499–508. [Google Scholar] [CrossRef]
- Lundström, D.; Amadori, K.; Krus, P. Validation of models for small scale electric propulsion systems. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010; p. 483. [Google Scholar]
- Gur, O.; Rosen, A. Optimizing electric propulsion systems for UAVs. In Proceedings of the 12th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Victoria, UK, 10–12 September 2008; p. 5916. [Google Scholar]
- Bershadsky, D.; Haviland, S.; Johnson, E.N. Electric multirotor UAV propulsion system sizing for performance prediction and design optimization. In Proceedings of the 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, San Diego, CA, USA, 4–8 January 2016; p. 0581. [Google Scholar]
- Gong, A.; Verstraete, D. Development of a dynamic propulsion model for electric UAVs. In Proceedings of the Asia-Pacific International Symposium on Aerospace Technology (APISAT 2015), Cairns, Australia, 25–27 November 2015; Engineers Australia: Barton, Australia, 2015; p. 206. [Google Scholar]
- Gong, A.; Verstraete, D. Experimental testing of electronic speed controllers for UAVs. In Proceedings of the 53rd AIAA/SAE/ASEE Joint Propulsion Conference, Atlanta, GA, USA, 10–12 July 2017; p. 4955. [Google Scholar]
- Gong, A.; MacNeill, R.; Verstraete, D. Performance Testing and Modeling of a Brushless DC Motor, Electronic Speed Controller and Propeller for a Small UAV Application. In Proceedings of the 2018 Joint Propulsion Conference, Cincinnati, OH, USA, 9–11 July 2018; p. 4584. [Google Scholar]
- Kim, H.; Lim, D.; Yee, K. Comprehensive analysis and optimized design of multirotor type UAVs. In Proceedings of the APISAT 2019: Asia Pacific International Symposium on Aerospace Technology, Gold Coast, Australia, 4–6 December 2019; Engineers Australia: Barton, Australia, 2019; p. 842. [Google Scholar]
- Kim, M.; Joo, H.; Jang, B. Conceptual multicopter sizing and performance analysis via component database. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 105–109. [Google Scholar]
- Biczyski, M.; Sehab, R.; Whidborne, J.F.; Krebs, G.; Luk, P. Multirotor Sizing Methodology with Flight Time Estimation. J. Adv. Transp. 2020, 2020. [Google Scholar] [CrossRef]
- Barnes, W.; McCormick, W. Aerodynamics Aeronautics and Flight Mechanics; Wiley: Hoboken, NJ, USA, 1995. [Google Scholar]
- T-Motor. T-Motor The Safer Propulsion System. 2020. Available online: https://uav-en.tmotor.com/ (accessed on 21 September 2020).
- SPS Company Limited. Scorpion Power System. 2020. Available online: https://www.scorpionsystem.com/ (accessed on 21 September 2020).
- Shanghai Dualsky Model Co., Ltd. Dualsky Advanced Power Systems. 2020. Available online: http://en.dualsky.com/ (accessed on 21 September 2020).
- SunnySky USA. SunnySky Motors. 2020. Available online: https://sunnyskyusa.com/ (accessed on 21 September 2020).
- Pollefliet, J. Power Electronics: Drive Technology and Motion Control; Elsevier Science: Amsterdam, The Netherlands, 2017. [Google Scholar]
- Ma, F.; Yin, H.; Wei, L.; Wu, L.; Gu, C. Analytical calculation of armature reaction field of the interior permanent magnet motor. Energies 2018, 11, 2375. [Google Scholar] [CrossRef] [Green Version]
- Sinha, N.K.; Dicenzo, C.D.; Szabados, B. Modeling of DC motors for control applications. IEEE Trans. Ind. Electron. Control Instrum. 1974, 84–88. [Google Scholar] [CrossRef]
- PSCAD. Estimation of Armature Reaction Constants. 2020. Available online: https://www.pscad.com/webhelp/Master_Library_Models/Machines/DC_Machine/Armature_Reaction_Data.htm#Estimation (accessed on 21 September 2020).
- Adkins, B.; Harley, R.G. The General Theory of Alternating Current Machines: Application to Practical Problems; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Fussell, B. Thermal effects on the torque-speed performance of a brushless DC motor. In Proceedings of the Electrical/Electronics Insulation Conference, Chicago, IL, USA, 4–7 October 1993; pp. 403–411. [Google Scholar]
- Montone, D. Temperature effects on motor performance. AMETEK Adv. Motion Solut. 2017, 21, 2018. [Google Scholar]
- Bilgin, O.; Kazan, F.A. The effect of magnet temperature on speed, current and torque in PMSMs. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 2080–2085. [Google Scholar]
- Gao, X. BLDC motor control with hall sensors based on FRDM-KE02Z. In Application Note AN4776; Freescale Semiconductor Inc.: Austin, TX, USA, 2013. [Google Scholar]
- Mogensen, K.N. Motor-control considerations for electronic speed control in drones. In Analog Applications Journal; Texas Instruments Incorporated: Dallas, TX, USA, 2016. [Google Scholar]
- Lakkas, G. MOSFET power losses and how they affect power-supply efficiency. Analog. Appl. 2016, 10, 22–26. [Google Scholar]
- Semiconductor, R. Switching Regulator IC Series, Calculation of Power Loss (Synchronous). No. AEK59-D1-0065-2. 2016. Available online: http://wwww.rohm.com (accessed on 21 September 2020).
- Graovac, D.; Purschel, M.; Kiep, A. MOSFET power losses calculation using the data-sheet parameters. Infineon Appl. Note 2006, 1, 1–23. [Google Scholar]
- Brown, J. Power MOSFET basics: Understanding gate charge and using it to assess switching performance. Vishay Siliconix 2004, AN608, 153. [Google Scholar]
- Danlions Electric Industrial Co., Ltd. CobraMotorsUSA. 2020. Available online: https://www.cobramotorsusa.com/ (accessed on 21 September 2020).
- STMicroelectronics. STEVAL-ESC001V1—Electronic Speed Controller Reference Design for Drones. 2020. Available online: https://www.st.com/en/evaluation-tools/steval-esc001v1.html (accessed on 21 September 2020).
- Hobbywing Technology Co., Ltd. Hobbywing. 2020. Available online: https://www.hobbywing.com/ (accessed on 21 September 2020).
- Gray, J.S.; Hwang, J.T.; Martins, J.R.R.A.; Moore, K.T.; Naylor, B.A. OpenMDAO: An open-source framework for multidisciplinary design, analysis, and optimization. Struct. Multidiscip. Optim. 2019, 59, 1075–1104. [Google Scholar] [CrossRef]
- Lambe, A.B.; Martins, J.R. Extensions to the design structure matrix for the description of multidisciplinary design, analysis, and optimization processes. Struct. Multidiscip. Optim. 2012, 46, 273–284. [Google Scholar] [CrossRef]
- Onódi, P. OpenMDAO-XDSM. 2020. Available online: https://github.com/onodip/OpenMDAO-XDSM (accessed on 21 September 2020).
- Kenway, G.K.; Kennedy, G.J.; Martins, J.R. Scalable parallel approach for high-fidelity steady-state aeroelastic analysis and adjoint derivative computations. AIAA J. 2014, 52, 935–951. [Google Scholar] [CrossRef] [Green Version]
- T-Motor. U15II—U Series. 2020. Available online: https://uav-en.tmotor.com/html/2018/u_0330/8.html (accessed on 21 September 2020).
- Direct, K. KDE13218XF-105. 2020. Available online: https://www.kdedirect.com/collections/uas-multi-rotor-brushless-motors/products/kde13218xf-105 (accessed on 21 September 2020).
- Direct, K. KDE10218XF-105. 2020. Available online: https://www.kdedirect.com/collections/uas-multi-rotor-brushless-motors/products/kde10218xf-105 (accessed on 21 September 2020).
- RCbenchmark. Series 1780—Large Drone Propulsion Test. 2020. Available online: https://www.rcbenchmark.com/pages/series-1780-thrust-stand-dynamometer (accessed on 21 September 2020).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Magnet Type | Ceramic | SmCo | AlNiCo | NdFeB |
|---|---|---|---|---|
| [/C] | −0.0020 | −0.0004 | −0.0002 | −0.0012 |
| [C] | 300 | 300 | 540 | 150 |
| Conductor Material | Silver | Gold | Copper | Aluminum |
|---|---|---|---|---|
| [/C] | 0.0038 | 0.0037 | 0.0040 | 0.0043 |
| Item | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| Manufacturer | T-motor | T-motor | T-motor | T-motor | CobraMotor | STM |
| Product | Flame60A HV | Flame100A LV | Flame100A HV | Flame200A HV | MR60 | ESC001V1 |
| Max. Current | 60 A | 100 A | 100 A | 200 A | 60 A | 20 A |
| Peak Current | 80 A | 120 A | 120A | 240 A | 75 A | 30 A |
| Max. Voltage | 52.2 V | 34.8 V | 60.9V | 60.9 V | 26.1 V | 26.1 V |
| Max. Power | 3132 W | 3480 W | 6090 W | 12180 W | 1566 W | 522 W |
| MOSFET | TPR4R008NH | FDMS8333L | IPB015N08N5 | TPH4R50ANH | TPCA8057-H | STL160N4F7 |
| No. of MOSFETs | 18 | 30 | 6 | 42 | 18 | 6 |
| 3.3 m | 2.4 m | 1.1 m | 3.7 m | 2.6 m | 2.1 m | |
| 2.2 m | 0.96 m | 2.2 m | 1.057 m | 1.733 m | 4.2 m | |
| 5.7 nSec | 4.7 nSec | 32.0 nSec | 9.6 nSec | 4.3 nSec | 6.6 nSec | |
| 11.0 nSec | 4.2 nSec | 28.0 nSec | 13.0 nSec | 6.3 nSec | 5.7 nSec | |
| Item | 7 | 8 | 9 | 10 | 11 | 12 |
| Manufacturer | Hobbywing | Hobbywing | Hobbywing | Hobbywing | Hobbywing | Hobbywing |
| Product | XRotor10A | XRotor15A | XRotor20A | XRotor25A | XRotor40A Pro | XRotor50A Pro |
| Max. Current | 10 A | 15 A | 20 A | 25 A | 40 A | 50 A |
| Peak Current | 15 A | 20 A | 30 A | 40 A | 60 A | 70 A |
| Max. Voltage | 13.05 A | 17.4V | 17.4 V | 26.1 V | 26.1 V | 26.1 V |
| Max. Power | 130.5 W | 261 W | 348 W | 652.5 W | 1044 W | 1305 W |
| MOSFET | IRFH830PbF | IRFH8318PbF | TPCA8087 | IRFH7440PbF | FDMS8333L | SM4023NSKP |
| No. of MOSFETs | 6 | 6 | 6 | 6 | 12 | 12 |
| 3.0 m | 2.5 m | 1.5 m | 1.8 m | 2.4 m | 1.85 m | |
| 6.0 m | 5.0 m | 3.0 m | 3.6 m | 2.4 m | 1.85 m | |
| 25.0 nSec | 33.0 nSec | 5.7 nSec | 45.0 nSec | 4.7 nSec | 10.0 nSec | |
| 9.2 nSec | 12.0 nSec | 11.0 nSec | 42.0 nSec | 4.2 nSec | 34.0 nSec |
| Specifications | Set 1 | Set 2 | Set 3 | |
|---|---|---|---|---|
| Motor | Product | T-motor U15II | KDE13218XF-105 | KDE10218XF-105 |
| (rpm/V) | 80 | 105 | 105 | |
| (m) | 17 | 13 | 23 | |
| (A @ 10 V) | 3.8 | 3.1 | 1.0 | |
| Propeller | Product | T-motor G404 × 13.1CF | KDE-CF-355-DP 35.5 × 12.1 | KDE-CF-305-DP 30.5 × 9.7 |
| Dia. (inches) | 40 | 35.5 | 30.5 | |
| Pitch (inches) | 13.1 | 12.1 | 9.7 | |
| ESC | Product | FLAME 180A HV | KDE-UAS125UVC-HE | |
| (A) | 180 | 125 | ||
| Power | Experiment | Power supply (Capacity: 12,000 W) | ||
| Model | LiPo Battery (12S1P 18,000 mAh) | |||
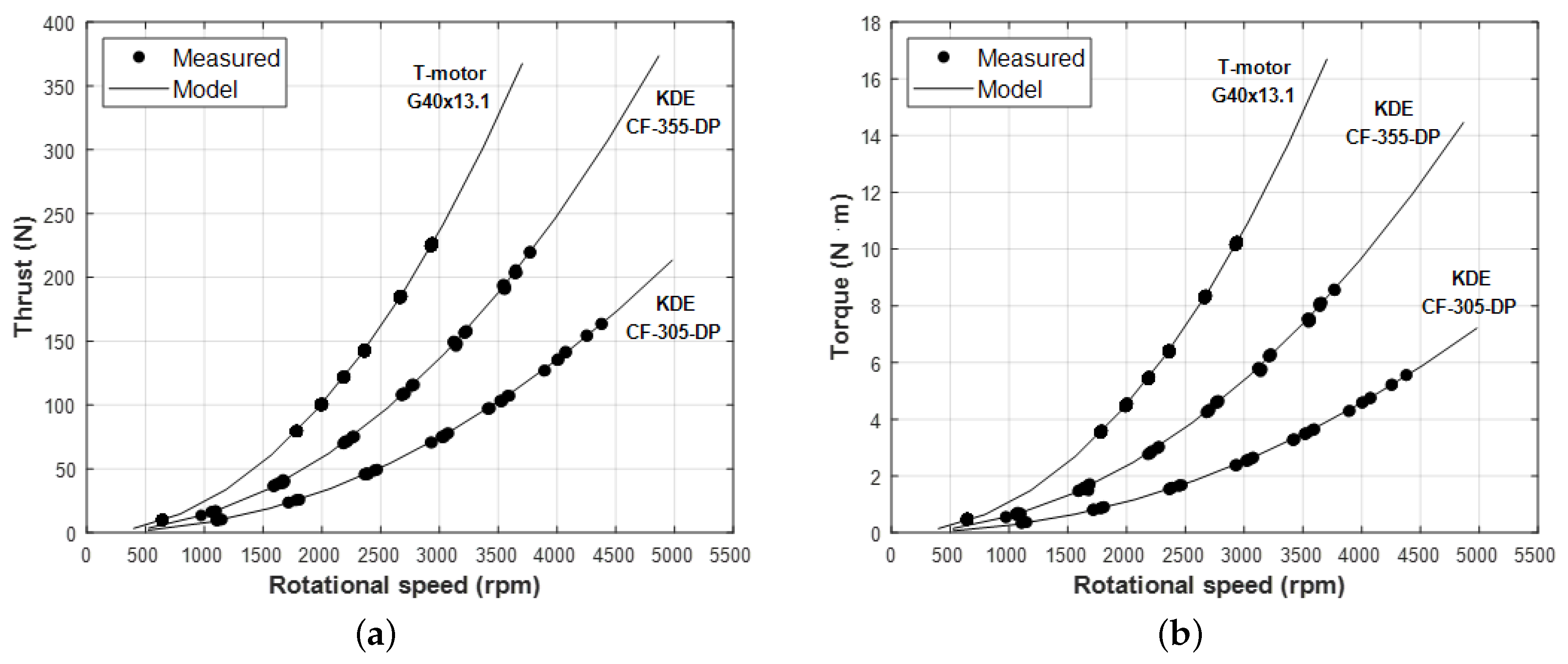
| Sample | Coefficient | k [m s] | a [ ] | b [ ] | c [ ] |
|---|---|---|---|---|---|
| T-motor G40x13.1 | 0.075880 | 0.09323 | 0.1316 | 0.3516 | |
| 0.006009 | 0.01175 | 0.4024 | 0.9575 | ||
| KDE-CF-355-DP | 0.076060 | 0.08517 | 0.1927 | 0.3854 | |
| 0.007588 | 0.04714 | 0.4976 | 0.9844 | ||
| KDE-CF-305-DP | 0.080430 | 0.07712 | 0.1793 | 0.3577 | |
| 0.007955 | 0.07292 | 0.4924 | 0.9867 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, J.; Shi, H.; Lee, K.; Kang, B. Improvement of Electric Propulsion System Model for Performance Analysis of Large-Size Multicopter UAVs. Appl. Sci. 2020, 10, 8080. https://doi.org/10.3390/app10228080
Jeong J, Shi H, Lee K, Kang B. Improvement of Electric Propulsion System Model for Performance Analysis of Large-Size Multicopter UAVs. Applied Sciences. 2020; 10(22):8080. https://doi.org/10.3390/app10228080
Chicago/Turabian StyleJeong, Jinseok, Hayoung Shi, Kichang Lee, and Beomsoo Kang. 2020. "Improvement of Electric Propulsion System Model for Performance Analysis of Large-Size Multicopter UAVs" Applied Sciences 10, no. 22: 8080. https://doi.org/10.3390/app10228080
APA StyleJeong, J., Shi, H., Lee, K., & Kang, B. (2020). Improvement of Electric Propulsion System Model for Performance Analysis of Large-Size Multicopter UAVs. Applied Sciences, 10(22), 8080. https://doi.org/10.3390/app10228080