Lightweight Semantic Segmentation Network for Real-Time Weed Mapping Using Unmanned Aerial Vehicles

 ,
, 


Abstract
1. Introduction
2. Hardware Development for a UAV System
2.1. Map Visualization Module
2.2. Flight Control Module
2.3. Image Collection and Processing
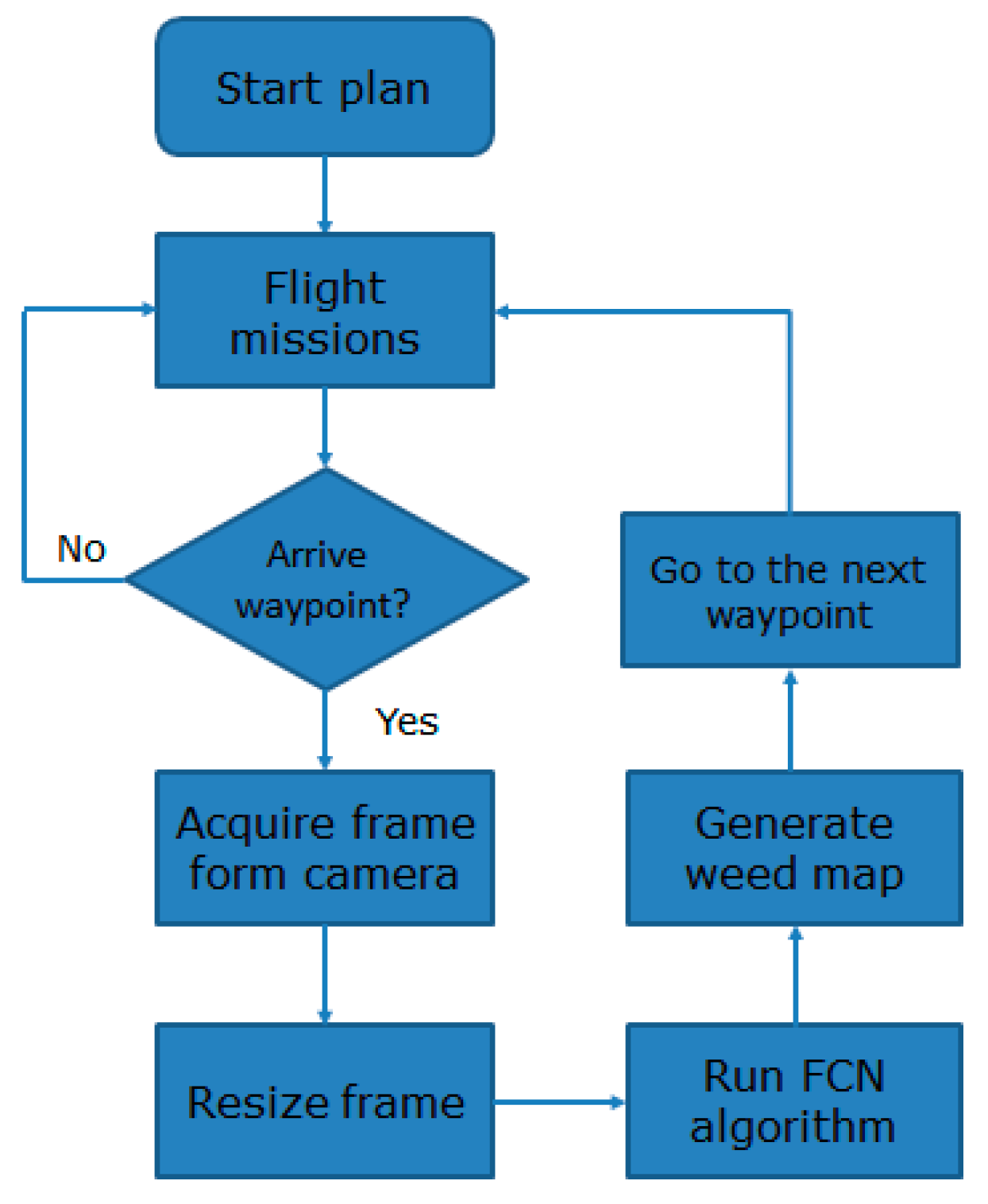
2.4. Task Assignment
3. Model Design and Optimization
3.1. Model Design
3.2. Optimization of the Inference Process
4. Results
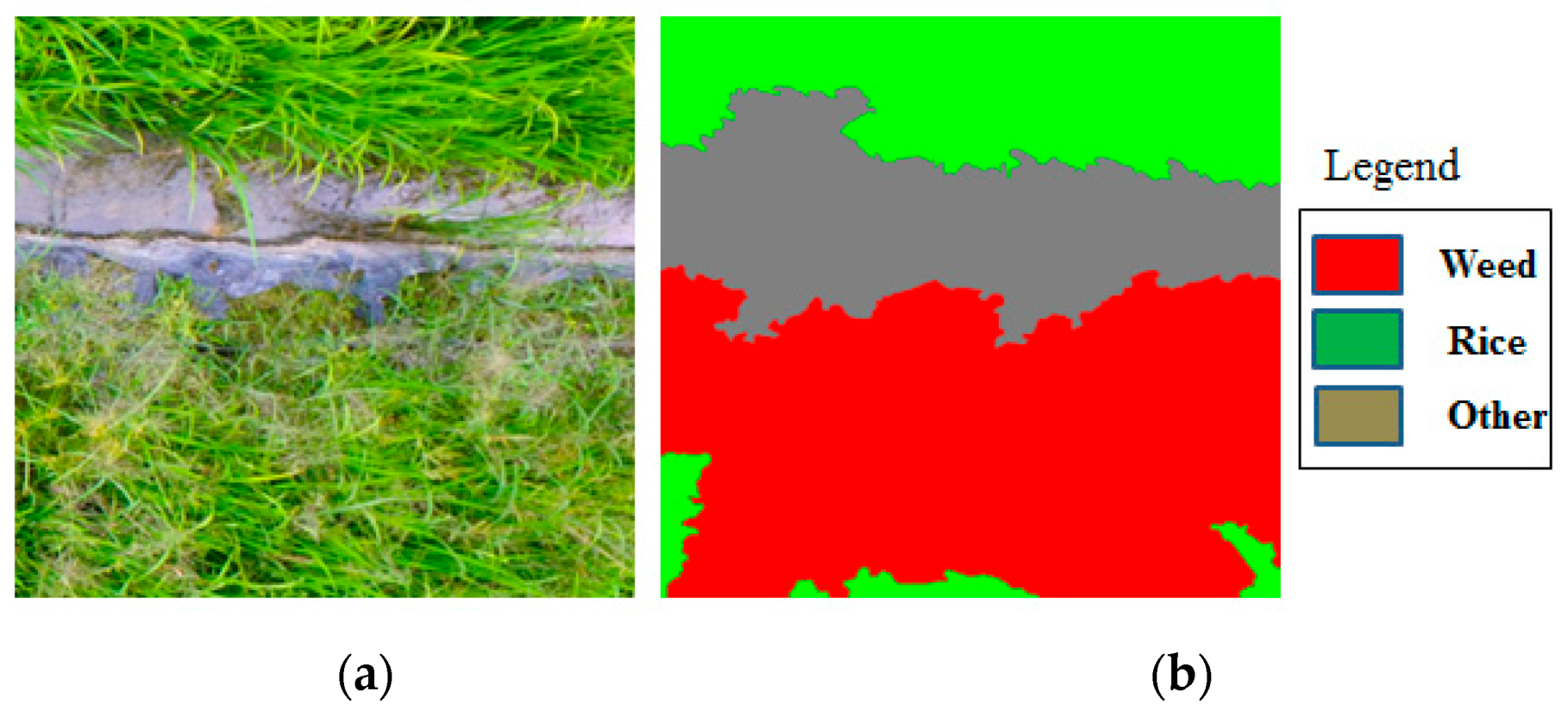
4.1. Data Collection
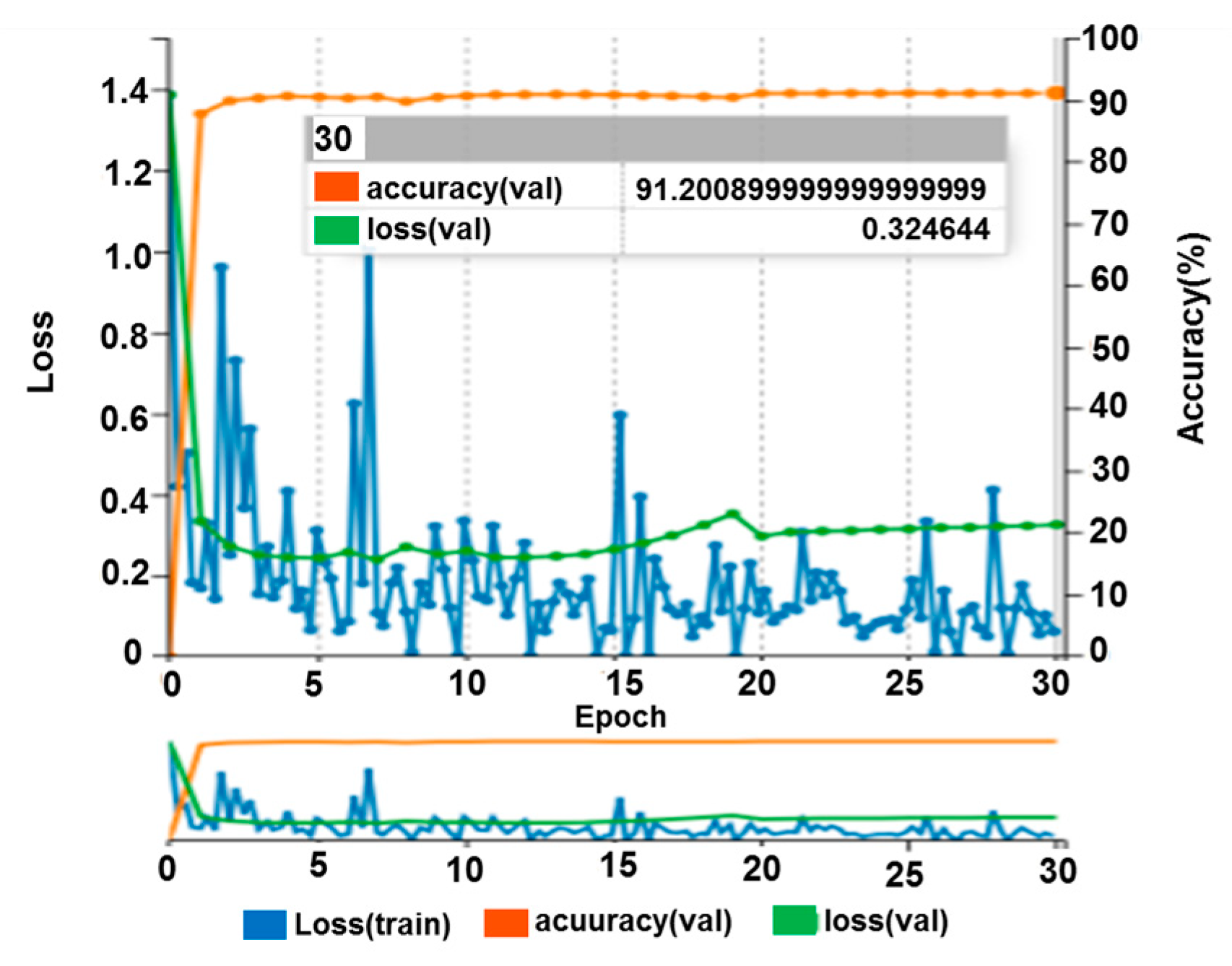
4.2. Model Design
4.3. Optimization of the Inference Process
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- López-Granados, F. Weed detection for site-specific weed management: Mapping and real-time approaches. Weed Res. 2010, 51, 1–11. [Google Scholar] [CrossRef]
- Wang, D.; Shao, Q.; Yue, H. Surveying wild animals from satellites, manned aircraft and unmanned aerial systems (UASs): A Review. Remote Sens. 2019, 11, 1308. [Google Scholar] [CrossRef]
- Balafoutis, A.T.; Beck, B.; Fountas, S.; Vangeyte, J.; Van Der Wal, T.; Soto, I.; Gómez-Barbero, M.; Barnes, A.P.; Eory, V. Precision agriculture technologies positively contributing to GHG emissions mitigation, farm productivity and economics. Sustainability 2017, 9, 1339. [Google Scholar] [CrossRef]
- Pérez-Ortiz, M.; Peña, J.; Gutiérrez, P.; Torres-Sánchez, J.; Hervás-Martínez, C.; López-Granados, F. A semi-supervised system for weed mapping in sunflower crops using unmanned aerial vehicles and a crop row detection method. Appl. Soft Comput. 2015, 37, 533–544. [Google Scholar] [CrossRef]
- Castaldi, F.; Pelosi, F.; Pascucci, S.; Casa, R. Assessing the potential of images from unmanned aerial vehicles (UAV) to support herbicide patch spraying in maize. Precis Agric. 2016, 18, 76–94. [Google Scholar] [CrossRef]
- Barmpoutis, P.; Stathaki, T.; Dimitropoulos, K.; Grammalidis, N. Early fire detection based on aerial 360-degree sensors, deep convolution neural networks and exploitation of fire dynamic textures. Remote Sens. 2020, 12, 3177. [Google Scholar] [CrossRef]
- Womg, A.; Shafiee, M.J.; Li, F.; Chwyl, B. Tiny SSD: A Tiny Single-Shot Detection Deep Convolutional Neural Network for Real-Time Embedded Object Detection. In Proceedings of the 2018 15th Conference on Computer and Robot Vision (CRV), Toronto, ON, Canada, 9–11 May 2018; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2018; pp. 95–101. [Google Scholar]
- Hossain, S.; Lee, D.-J. Deep learning-based real-time multiple-object detection and tracking from aerial imagery via a flying robot with GPU-based embedded devices. Sensors 2019, 19, 3371. [Google Scholar] [CrossRef] [PubMed]
- Jadon, A.; Varshney, A.; Ansari, M.S. Low-complexity high-performance deep learning model for real-time low-cost embedded fire detection systems. Procedia Comput. Sci. 2020, 171, 418–426. [Google Scholar] [CrossRef]
- Foggia, P.; Saggese, A.; Vento, M. Real-timfire detection for video-surveillance applications using a combination of experts based on color, shape and motion. IEEE Trans. Circuits Syst. Video Technol. 2015, 25, 1545–1556. [Google Scholar] [CrossRef]
- Chen, S.; Lin, W. Embedded System Real-Time Vehicle Detection Based on Improved YOLO Network. In Proceedings of the 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 11–13 October 2019; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2019; pp. 1400–1403. [Google Scholar]
- Fu, G.; Liu, C.; Zhou, R.; Sun, T.; Zhang, Q. Classification for high resolution remote sensing imagery using a fully convolutional network. Remote. Sens. 2017, 9, 498. [Google Scholar] [CrossRef]
- Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Deng, X.; Zhang, L. A fully convolutional network for weed mapping of unmanned aerial vehicle (UAV) imagery. PLoS ONE 2018, 13, e0196302. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Lan, Y.; Yang, A.; Zhang, Y.; Wen, S.; Deng, J. Deep learning versus object-based image analysis (OBIA) in weed mapping of UAV imagery. Int. J. Remote. Sens. 2020, 41, 3446–3479. [Google Scholar] [CrossRef]
- Kvaser CAN Protocol Tutorial. Available online: https://www.kvaser.com/can-protocol-tutorial/ (accessed on 18 September 2020).
- TOP Pod. Available online: http://www.topotek.com/typo-en.html (accessed on 18 September 2020).
- Culjak, I.; Abram, D.; Pribanic, T.; Dzapo, H.; Cifrek, M. A Brief Introduction to OpenCV. In Proceedings of the 35th International Convention MIPRO, Opatija, Croatia, 21–25 May 2012; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2012; pp. 2142–2147. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2016; pp. 770–778. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the 3rd International Conference on Learning Representations (ICLR), San Diego, CA, USA, 7–9 May 2015; Available online: https://arxiv.org/pdf/1409.1556.pdf (accessed on 13 October 2020).
- Huang, H.; Lan, Y.; Deng, J.; Yang, A.; Deng, X.; Zhang, L.; Wen, S. A Semantic labeling approach for accurate weed mapping of high resolution UAV imagery. Sensors 2018, 18, 2113. [Google Scholar] [CrossRef] [PubMed]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going Deeper with Convolutions. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2015; pp. 1–9. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Device | Overall Accuracy (%) | Mean IoU (%) | Frames Per Second |
|---|---|---|---|---|
| The proposed FCN-Alexnet model | GTX 1060 | 91.2 | 70.5 | 12.5 |
| VGGNet-FCN by Simonyan et al. [19] | GTX 1060 | 92.3 | 72.8 | 3.1 |
| GoogLeNet-FCN by Szegedy et al. [21] | GTX 1060 | 91.9 | 71.3 | 5.9 |
| ResNet-FCN by He et al. [18] | GTX 1080 TI | 94.2 | 77.2 | 9.3 |
| Device | Precision Clibration | Overall Accuracy (%) | Mean IoU (%) | Frames Per Second |
|---|---|---|---|---|
| GTX 1060 | FP32 | 91.2 | 70.5 | 12.5 |
| Jetson TX2 | FP32 | 91.2 | 70.5 | 1.2 |
| GTX 1060 | FP16 | 80.9 | 62.8 | 35.6 |
| Jetson TX2 | FP16 | 80.9 | 62.8 | 4.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, J.; Zhong, Z.; Huang, H.; Lan, Y.; Han, Y.; Zhang, Y. Lightweight Semantic Segmentation Network for Real-Time Weed Mapping Using Unmanned Aerial Vehicles. Appl. Sci. 2020, 10, 7132. https://doi.org/10.3390/app10207132
Deng J, Zhong Z, Huang H, Lan Y, Han Y, Zhang Y. Lightweight Semantic Segmentation Network for Real-Time Weed Mapping Using Unmanned Aerial Vehicles. Applied Sciences. 2020; 10(20):7132. https://doi.org/10.3390/app10207132
Chicago/Turabian StyleDeng, Jizhong, Zhaoji Zhong, Huasheng Huang, Yubin Lan, Yuxing Han, and Yali Zhang. 2020. "Lightweight Semantic Segmentation Network for Real-Time Weed Mapping Using Unmanned Aerial Vehicles" Applied Sciences 10, no. 20: 7132. https://doi.org/10.3390/app10207132
APA StyleDeng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., & Zhang, Y. (2020). Lightweight Semantic Segmentation Network for Real-Time Weed Mapping Using Unmanned Aerial Vehicles. Applied Sciences, 10(20), 7132. https://doi.org/10.3390/app10207132