Stochastic Recognition of Physical Activity and Healthcare Using Tri-Axial Inertial Wearable Sensors



Abstract
Featured Application
Abstract
1. Introduction
2. Related Works
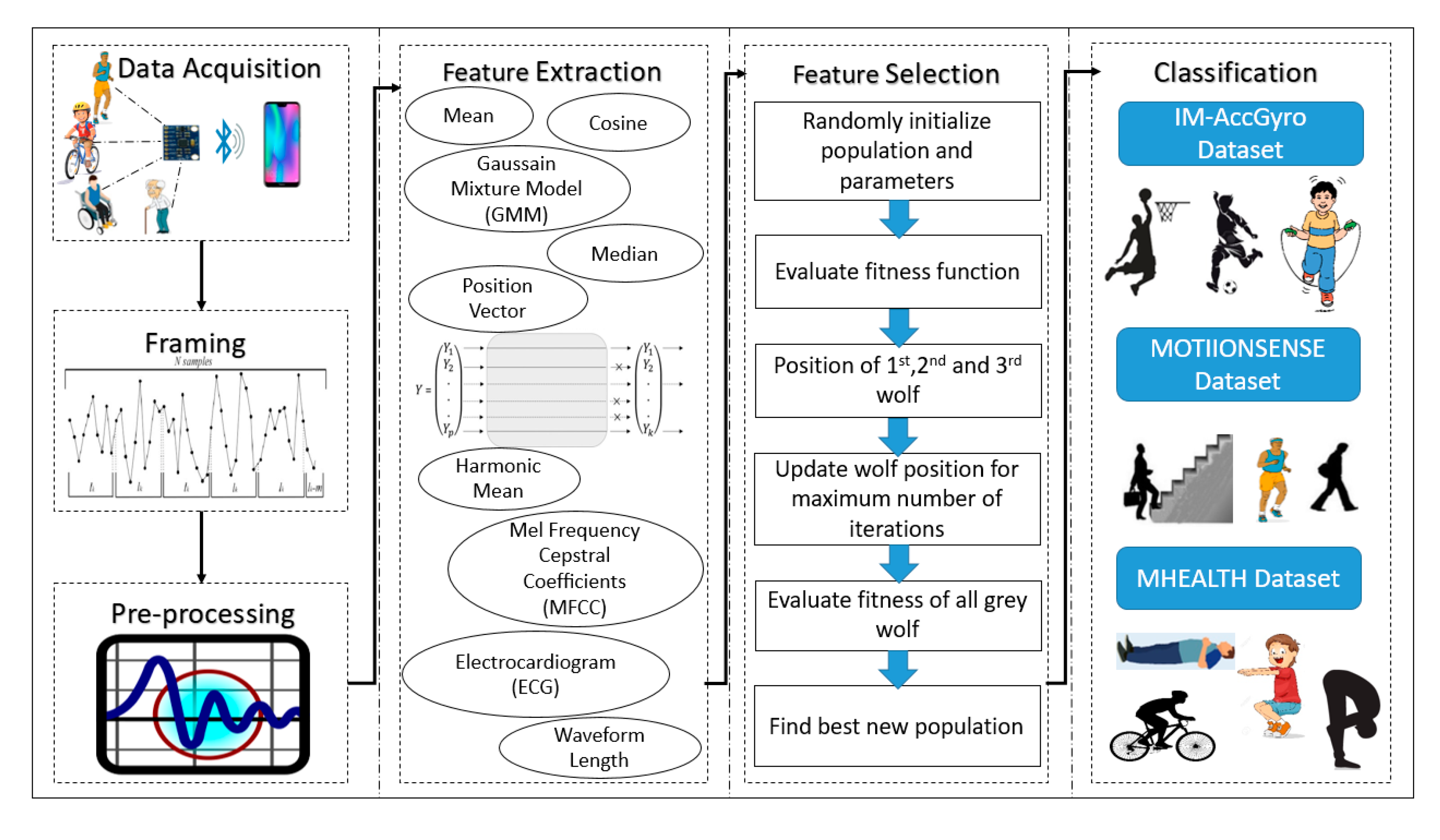
3. Methodology
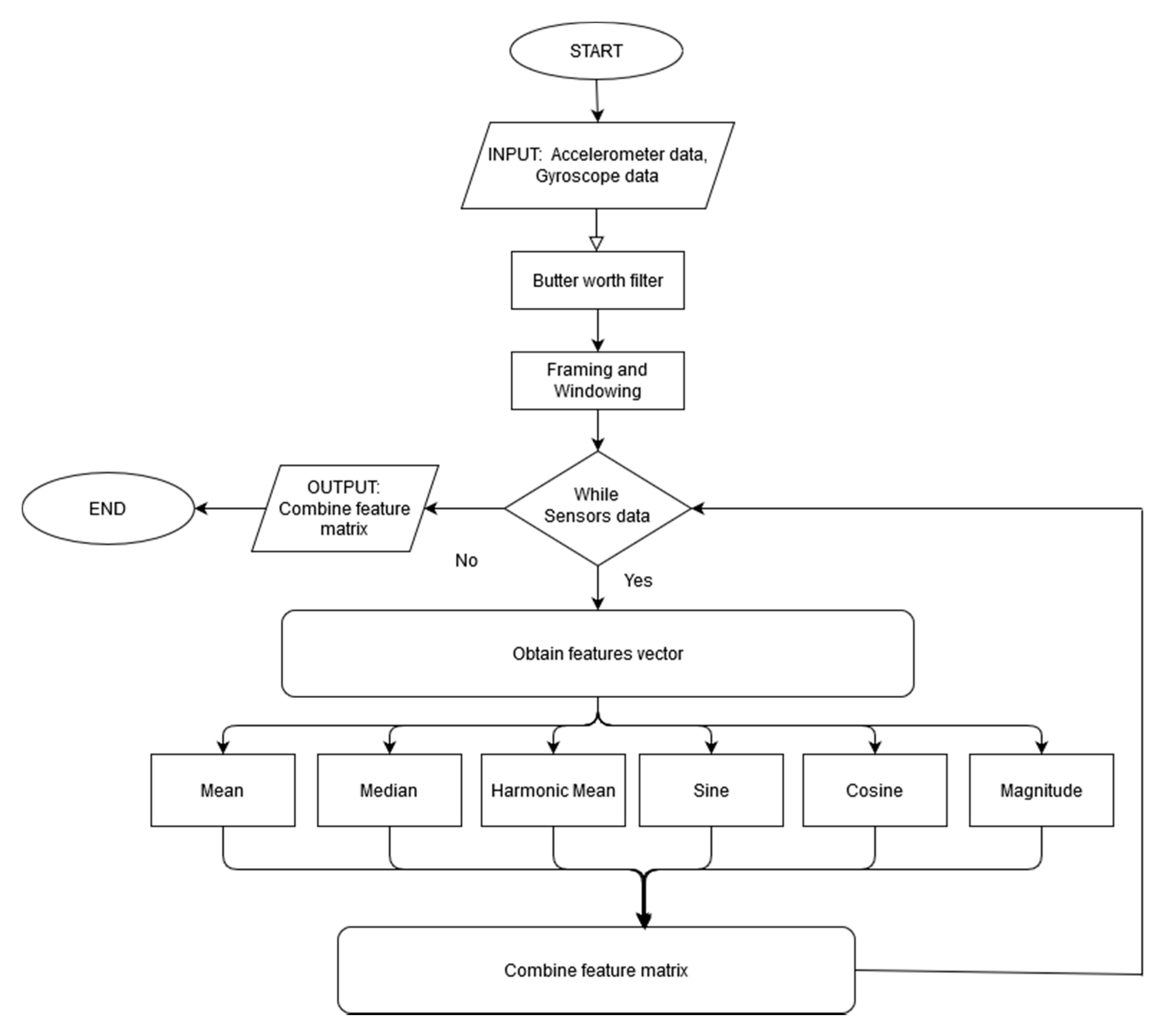
3.1. Preprocessing and Filtration of Sensor Data
3.2. Feature Extraction and Selection
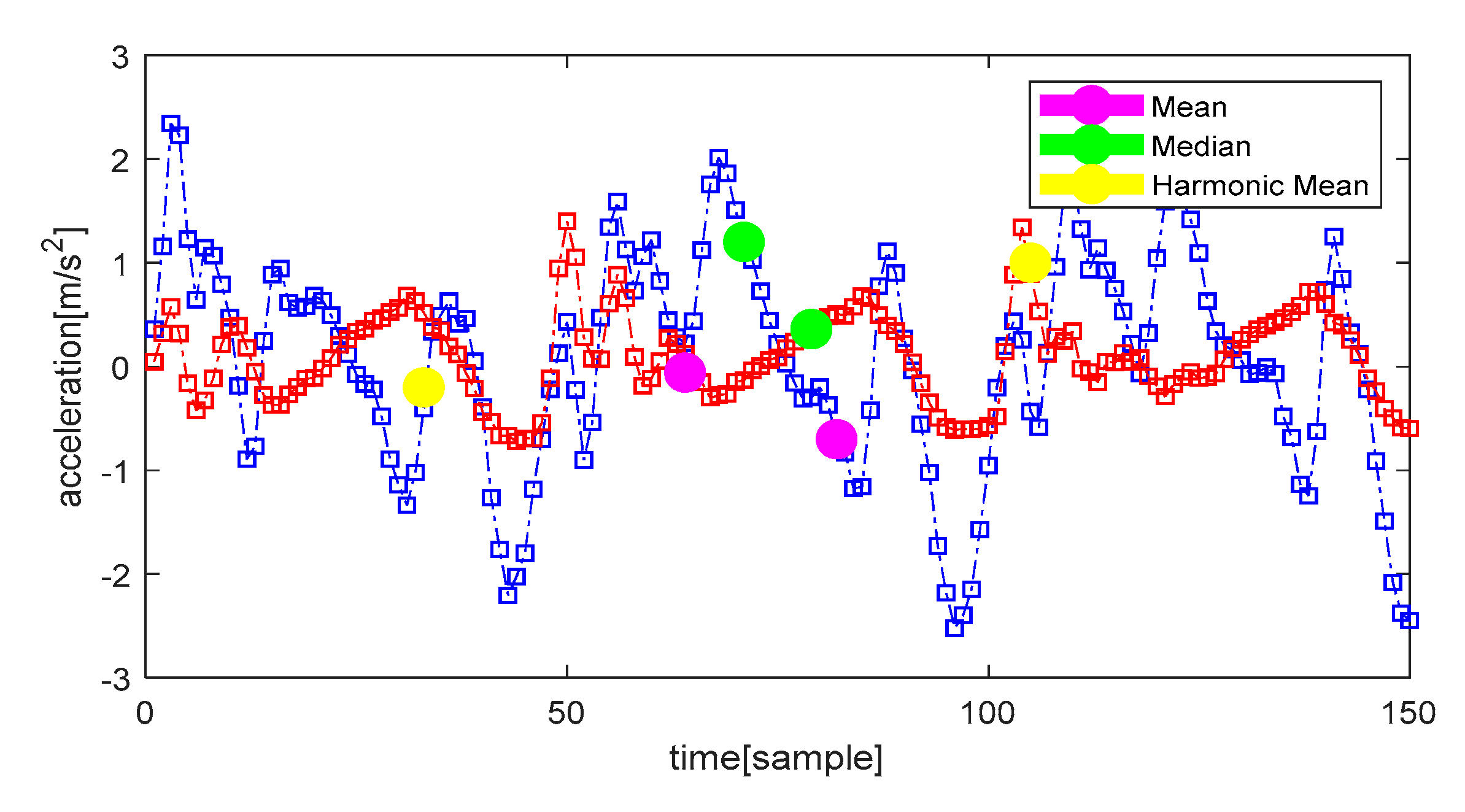
3.2.1. Mean Feature
3.2.2. Median Feature
3.2.3. Harmonic Mean Feature
3.2.4. Sine Feature
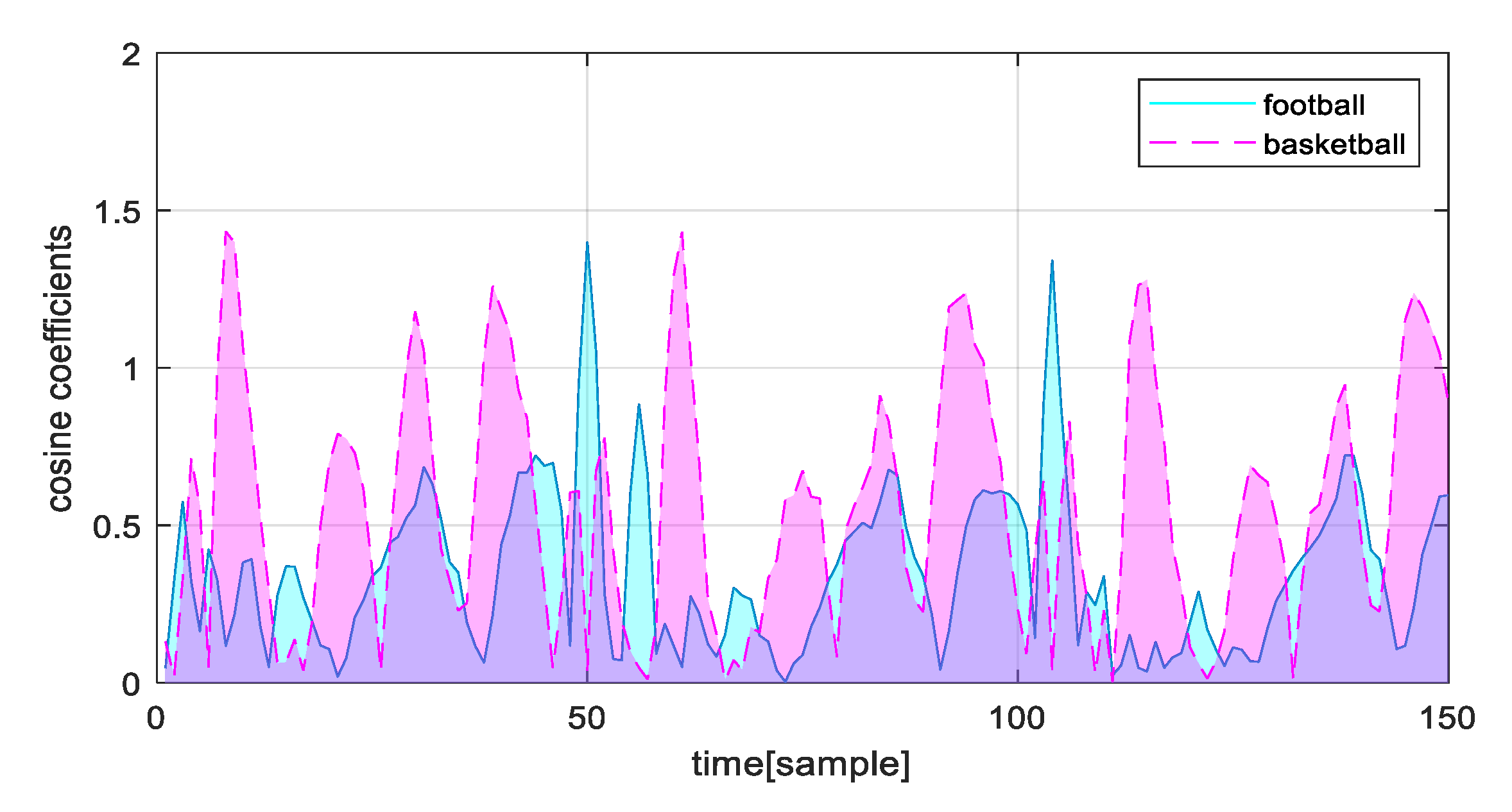
3.2.5. Cosine Feature
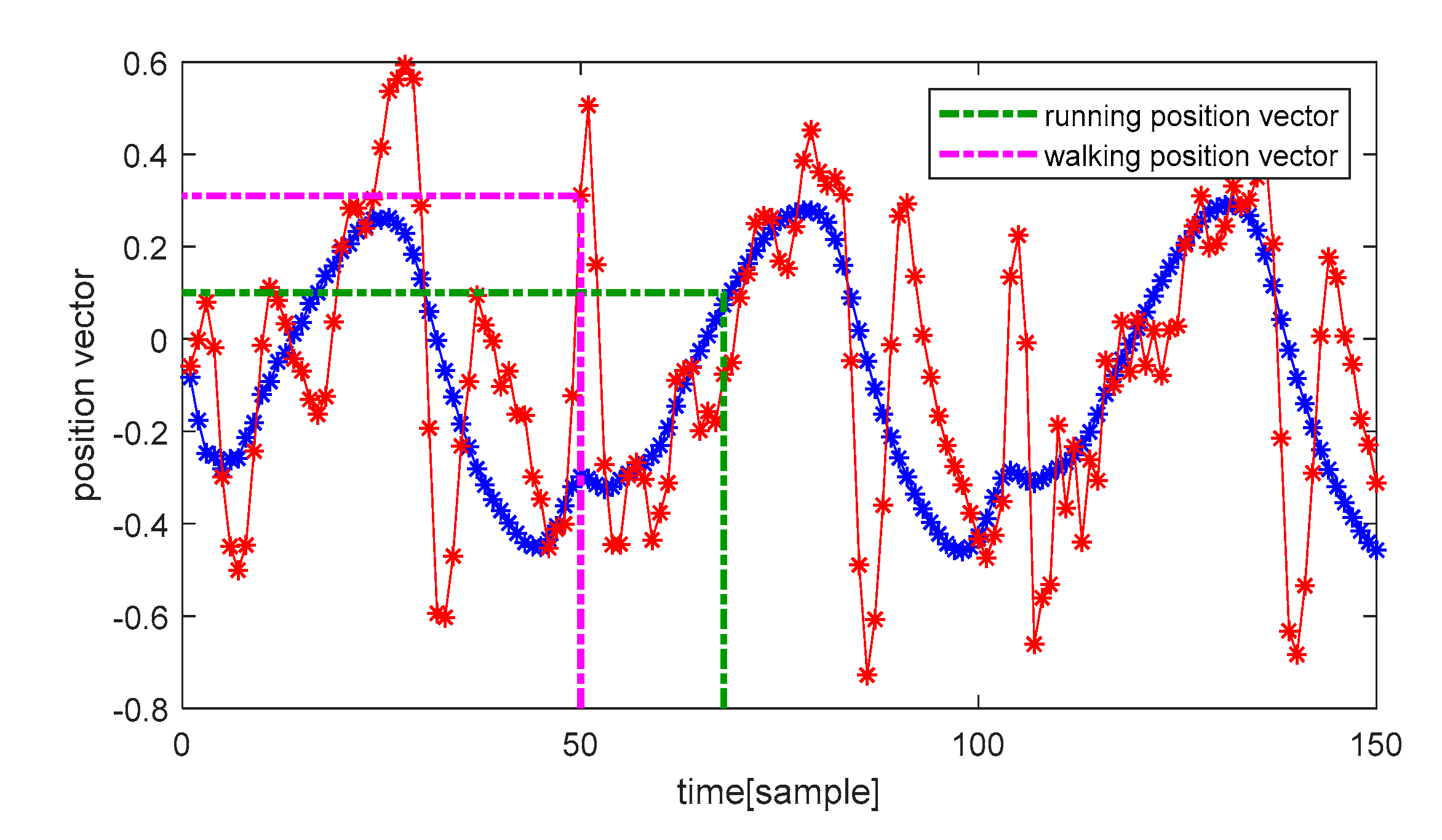
3.2.6. Position Vector Feature
3.2.7. MFCC Vector Feature
3.2.8. Autoregressive Feature
3.2.9. Waveform Length Feature
3.2.10. Slope Sign Change Feature
3.2.11. Willison Amplitude Feature
3.2.12. GMM Mean Feature
3.2.13. GMM Weighting Ratio Feature
3.2.14. GMM-Based Covariance Ratio Feature
3.3. Basic Classifier
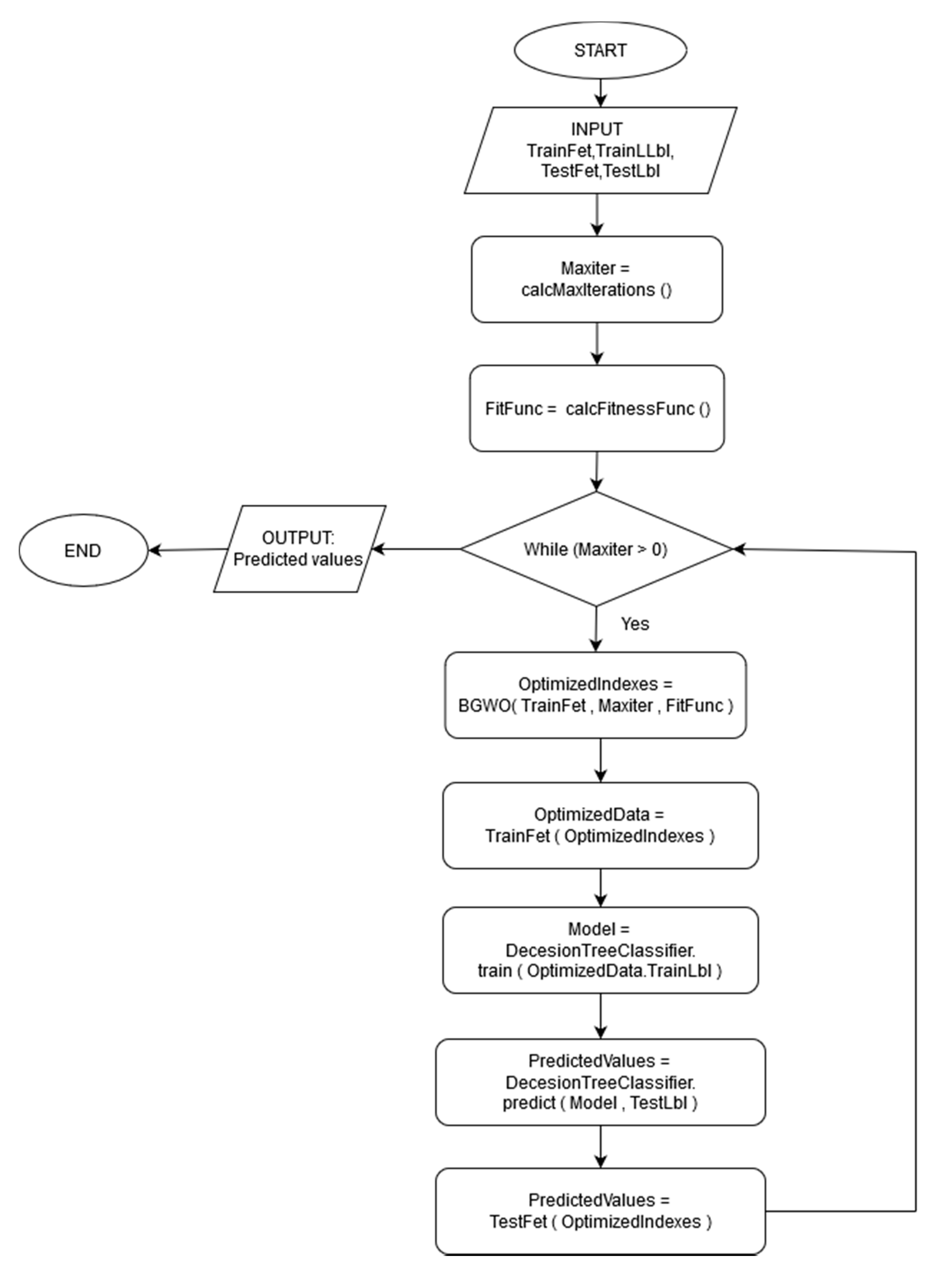
3.4. Pre-Classification Using Binary Grey Wolf Optimization
3.5. HAR Using a Decision Tree
3.5.1. Initialization of Attributes
3.5.2. Classification and Prediction
3.5.3. Building a DT from Training Data
4. Experimental Settings and Datasets
4.1. Dataset Description
4.2. Hardware Platform
5. Experimental Results and Evaluation
6. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Ronao, C.A.; Cho, S.B. Human activity recognition with smartphone sensors using deep learning neural networks. Expert Syst. Appl. 2016, 59, 235–244. [Google Scholar] [CrossRef]
- Mahmood, M.; Jalal, A.; Kim, K. WHITE STAG Model: Wise Human Interaction Tracking and Estimation (WHITE) using Spatio-temporal and Angular-geometric (STAG) Descriptors. Multimed. Tools Appl. 2020, 79, 6919–6950. [Google Scholar] [CrossRef]
- Sharma, R.; Ribeiro, B.; Pinto, A.M.; Cardoso, F.A. Exploring Geometric Feature Hyper-Space in Data to Learn Representations of Abstract Concepts. Appl. Sci. 2020, 10, 1994. [Google Scholar] [CrossRef]
- Alsheikh, M.A.; Selim, A.; Niyato, D.; Doyle, L.; Lin, S.; Tan, H.P. Deep activity recognition models with triaxial accelerometers. In Proceedings of the Workshops at the Thirtieth AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–13 February 2016. [Google Scholar]
- Shokri, M.; Tavakoli, K. A review on the artificial neural network approach to analysis and prediction of seismic damage in infrastructure. Int. J. Hydromechatron. 2019, 4, 178–196. [Google Scholar] [CrossRef]
- Osterland, S.; Weber, J. Analytical analysis of single-stage pressure relief valves. Int. J. Hydromechatron. 2019, 2, 32–53. [Google Scholar] [CrossRef]
- Nizami, I.F.; Majid, M.; ur Rehman, M.; Anwar, S.M.; Nasim., A.; Khurshid , K. No-reference image quality assessment using bag-of-features with feature selection. Multimed. Tools Appl. 2020, 79, 7811–7836. [Google Scholar] [CrossRef]
- Jalal, A.; Khalid, N.; Kim, K. Automatic Recognition of Human Interaction via Hybrid Descriptors and Maximum Entropy Markov Model Using Depth Sensors. Entropy 2020, 22, 817. [Google Scholar] [CrossRef]
- Susan, S.; Agrawal, P.; Mittal, M.; Bansal, S. New shape descriptor in the context of edge continuity. CAAI Trans. Intell. Technol. 2019, 4, 101–109. [Google Scholar] [CrossRef]
- Jalal, A.; Kim, Y.-H.; Kim, Y.-J.; Kamal, S.; Kim, D. Robust human activity recognition from depth video using spatiotemporal multi-fused features. Pattern Recognit. 2017, 61, 295–308. [Google Scholar] [CrossRef]
- Yang, J.B.; Nguyen, M.N.; San, P.P.; Li, X.L.; Krishnaswamy, S. Deep convolutional neural networks on multichannel time series for human activity recognition. In Proceedings of the 24th International Conference on Artificial Intelligence (IJCAI 15), Buenos Aires, Argentina, 25–31 July 2015. [Google Scholar]
- Tingting, Y.; Junqian, W.; Lintai, W.; Yong, X. Three-stage network for age estimation. CAAI Trans. Intell. Technol. 2019, 4, 122–126. [Google Scholar] [CrossRef]
- Iglesias, J.A.; Ledezma, A.; Sanchis, A.; Angelov, P. Real-Time Recognition of Calling Pattern and Behaviour of Mobile Phone Users through Anomaly Detection and Dynamically-Evolving Clustering. Appl. Sci. 2017, 7, 798. [Google Scholar] [CrossRef]
- Sargano, A.B.; Angelov, P.; Habib, Z. A Comprehensive Review on Handcrafted and Learning-Based Action Representation Approaches for Human Activity Recognition. Appl. Sci. 2017, 7, 110. [Google Scholar] [CrossRef]
- Wiens, T. Engine speed reduction for hydraulic machinery using predictive algorithms. Int. J. Hydromechatron. 2019, 1, 16–31. [Google Scholar] [CrossRef]
- Babiker, M.; Khalifa, O.O.; Htike, K.K.; Hassan, A.; Zaharadeen, M. Automated daily human activity recognition for video surveillance using neural network. In Proceedings of the IEEE 4th International Conference on Smart Instrumentation, Measurement and Application (ICSIMA), Putrajaya, Malaysia, 28–30 November 2017. [Google Scholar]
- Jalal, A.; Uddin, M.Z.; Kim, T.S. Depth Video-based Human Activity Recognition System Using Translation and Scaling Invariant Features for Life Logging at Smart Home. IEEE Trans. Consum. Electron. 2012, 58, 3. [Google Scholar] [CrossRef]
- Liu, L.; Peng, Y.X.; Liu, M.; Lukowicz, P. Sensor-based human activity recognition system with a multilayered model using time series shapelets. Knowl. Based Syst. 2015, 90, 138–152. [Google Scholar] [CrossRef]
- Jansi, R.; Amutha, R. Sparse representation based classification scheme for human activity recognition using smartphones. Multimed. Tools Appl. 2018, 78, 11027–11045. [Google Scholar] [CrossRef]
- Tian, Y.; Wang, X.; Chen, L.; Liu, Z. Wearable Sensor-Based Human Activity Recognition via Two-Layer Diversity-Enhanced Multiclassifier Recognition Method. Sensors 2019, 19, 2039. [Google Scholar] [CrossRef]
- Tahir, S.B.; Jalal, A.; Kim, K. Wearable Inertial Sensors for Daily Activity Analysis Based on Adam Optimization and the Maximum Entropy Markov Model. Entropy 2020, 22, 579. [Google Scholar] [CrossRef]
- Haresamudram, H.; Beedu, A.; Agrawal, V.; Grady, P.L.; Essa, I. Masked Reconstruction Based Self-Supervision for Human Activity Recognition. In Proceedings of the 24th annual International Symposium on Wearable Computers, Cancun, Mexico, 12–16 September 2020. [Google Scholar]
- Jordao, A.; Nazare, A.C.; Sena, J.; Schwartz, W.R. Human Activity Recognition Based on Wearable Sensor Data: A Standardization of the State-of-the-Art. arXiv 2019, arXiv:1806.05226. [Google Scholar]
- Batool, M.; Jalal, A.; Kim, K. Sensors Technologies for Human Activity Analysis Based on SVM Optimized by PSO Algorithm. In Proceedings of the 2019 International Conference on Applied and Engineering Mathematics (ICAEM), Taxila, Pakistan, 27–29 August 2019. [Google Scholar]
- Zha, Y.B.; Yue, S.G.; Yin, Q.J.; Liu, X.C. Activity recognition using logical hidden semi-markov models. In Proceedings of the 2013 10th International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), Chengdu, China, 17–19 December 2013. [Google Scholar]
- Zhu, C.; Miao, D. Influence of kernel clustering on an RBFN. CAAI Trans. Intell. Technol. 2019, 4, 255–260. [Google Scholar] [CrossRef]
- Nakano, K.; Chakraborty, B. Effect of Dynamic Feature for Human Activity Recognition using Smartphone Sensors. In Proceedings of the 2017 IEEE 8th International Conference on Awareness Science and Technology (iCAST), Taichung, Taiwan, 8–10 November 2017. [Google Scholar]
- Hamad, R.A.; Yang, L.; Woo, W.L.; Wei, B. Joint Learning of Temporal Models to Handle Imbalanced Data for Human Activity Recognition. Appl. Sci. 2020, 10, 5293. [Google Scholar] [CrossRef]
- Rodriguez, M.D.; Ahmed, J.; Shah, M. Action MACH: A spatio-temporal maximum average correlation height filter for action recognition. Computer Vision and Pattern Recognition. In Proceedings of the 2008 IEEE conference on computer vision and pattern recognition, Anchorage, AK, USA, 23–28 June 2008. [Google Scholar]
- Zhu, J.; San-Segundo, R.; Pardo, J.M. Feature extraction for robust physical activity recognition. Hum. Cent. Comput. Inf. Sci. 2017, 7, 219. [Google Scholar] [CrossRef]
- Biel, L.; Pettersson, O.; Philipson, L.; Wide, P. ECG analysis: A new approach in human identification. IEEE Trans. Instrum. Meas. 2001, 50, 808–812. [Google Scholar] [CrossRef]
- Tashi, Q.A.; Kadir, S.J.A.; Rais, H.M.; Mirjalili, S.; Alhussian, H. Binary Optimization Using Hybrid Grey Wolf Optimization for Feature Selection. IEEE Access 2019, 7, 39496–39508. [Google Scholar] [CrossRef]
- Jiang, K.; Ni, H.; Sun, P.; Han, R. An Improved Binary Grey Wolf Optimizer for Dependent Task Scheduling in Edge Computing. In Proceedings of the 2019 21st International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 17–20 February 2019. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Emary, E.; Hossam, M. Binary grey wolf optimization approaches for feature selection. Neurocomputing 2016, 172, 371–381. [Google Scholar] [CrossRef]
- Yin, D.S.; Wang, G.Y. A Self Learning Algorithm for Decision Tree Pre-prunning. In Proceedings of the 2004 International Conference on Machine Learning and Cybernetics, Shanghai, China, 26–29 August 2004. [Google Scholar]
- Ling, C.X.; Sheng, V.S.; Yang, Q. Test Strategies for Cost Sensitive Decision Trees. IEEE Trans. Knowl. Data Eng. 2006, 18, 8. [Google Scholar] [CrossRef]
- Malekzadeh, M.; Clegg, R.G.; Cavallaro, A.; Haddadi, H. Mobile Sensor Data Anonymization. In Proceedings of the International Conference on Internet of Things Design and Implementation, Montreal, QC, Canada, 15–18 April 2019. [Google Scholar]
- Banos, O.; Garcia, R.; Holgado-Terriza, J.A.; Damas, M.; Pomares, H.; Rojas, I.; Saez, A.; Villalonga, C. mHealthDroid: A novel framework for agile development of mobile health applications. In Proceedings of the 6th International Work-conference, Belfast, UK, 2–5 December 2014. [Google Scholar]
- Intelligent Media Center (IMC). Available online: https://github.com/Mouazma/IM-AccGyro (accessed on 15 September 2020).
- Guo, M.; Wang, W.; Yang, N.; Li, Z.; An, T. A multisensor multiclassifier hierarchical fusion model based on entropy weight for human activity recognition using wearable inertial sensors. IEEE Trans. Hum. Mach. Syst. 2018, 49, 105–111. [Google Scholar] [CrossRef]
- Fan, S.; Jia, Y.; Jia, C. A Feature Selection and Classification Method for Activity Recognition Based on an Inertial Sensing Unit. Information 2019, 10, 290. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dynamic Activities | Support Vector Machine | Genetic Algorithm | Decision Tree | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Activities | Precision | Recall | F-measure | Precision | Recall | F-measure | Precision | Recall | F-measure |
| DWS | 0.860 | 0.830 | 0.844 | 0.910 | 0.875 | 0.892 | 0.927 | 0.890 | 0.908 |
| UPS | 0.843 | 0.878 | 0.860 | 0.873 | 0.838 | 0.855 | 0.989 | 0.985 | 0.987 |
| WLK | 0.884 | 0.849 | 0.866 | 0.809 | 0.834 | 0.821 | 0.807 | 0.880 | 0.842 |
| JOG | 0.908 | 0.873 | 0.890 | 0.925 | 0.890 | 0.907 | 0.820 | 0.845 | 0.832 |
| SIT | 0.853 | 0.818 | 0.835 | 0.844 | 0.869 | 0.856 | 0.895 | 0.860 | 0.877 |
| STD | 0.882 | 0.937 | 0.908 | 0.854 | 0.829 | 0.841 | 0.865 | 0.835 | 0.849 |
| Dynamic Activities | Support Vector Machine | Genetic Algorithm | Decision Tree | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Activities | Precision | Recall | F-measure | Precision | Recall | F-measure | Precision | Recall | F-measure |
| WLK | 0.867 | 0.907 | 0.886 | 0.858 | 0.891 | 0.874 | 0.918 | 0.960 | 0.938 |
| CLS | 0.968 | 0.873 | 0.918 | 0.836 | 0.876 | 0.855 | 0.953 | 0.925 | 0.939 |
| STS | 0.882 | 0.977 | 0.927 | 0.818 | 0.858 | 0.837 | 0.933 | 0.985 | 0.958 |
| STR | 0.874 | 0.834 | 0.853 | 0.932 | 0.892 | 0.911 | 0.905 | 0.955 | 0.929 |
| WBF | 0.843 | 0.884 | 0.863 | 0.912 | 0.872 | 0.891 | 0.949 | 0.935 | 0.942 |
| CYC | 0.890 | 0.931 | 0.910 | 0.956 | 0.816 | 0.880 | 0.963 | 0.930 | 0.946 |
| JOG | 0.876 | 0.836 | 0.855 | 0.857 | 0.814 | 0.834 | 0.928 | 0.970 | 0.948 |
| RUN | 0.962 | 0.933 | 0.947 | 0.909 | 0.869 | 0.888 | 0.965 | 0.965 | 0.965 |
| JFB | 0.877 | 0.846 | 0.861 | 0.806 | 0.848 | 0.826 | 0.919 | 0.975 | 0.946 |
| KNB | 0.947 | 0.987 | 0.966 | 0.965 | 0.925 | 0.944 | 0.966 | 0.860 | 0.910 |
| FEA | 0.855 | 0.894 | 0.874 | 0.879 | 0.839 | 0.858 | 0.936 | 0.888 | 0.911 |
| LYD | 0.943 | 0.911 | 0.926 | 0.952 | 0.915 | 0.933 | 0.954 | 0.935 | 0.944 |
| Dynamic Activities | Support Vector Machine | Genetic Algorithm | Decision Tree | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Activities | Precision | Recall | F-measure | Precision | Recall | F-measure | Precision | Recall | F-measure |
| STU | 0.907 | 0.900 | 0.903 | 0.906 | 0.913 | 0.909 | 0.945 | 0.955 | 0.950 |
| WLK | 0.921 | 0.928 | 0.924 | 0.911 | 0.904 | 0.907 | 0.970 | 0.970 | 0.970 |
| CLP | 0.917 | 0.910 | 0.913 | 0.919 | 0.912 | 0.915 | 0.980 | 0.985 | 0.982 |
| BOX | 0.912 | 0.905 | 0.908 | 0.916 | 0.923 | 0.919 | 0.989 | 0.945 | 0.966 |
| RUN | 0.915 | 0.922 | 0.918 | 0.908 | 0.902 | 0.904 | 0.970 | 0.990 | 0.980 |
| STD | 0.913 | 0.906 | 0.909 | 0.921 | 0.914 | 0.917 | 0.955 | 0.965 | 0.960 |
| Dynamic Activities | DWS | JOG | UPS | SIT | WLK | STD |
|---|---|---|---|---|---|---|
| DWS | 89.00 | 1.00 | 5.50 | 0 | 4.50 | 0 |
| JOG | 0 | 98.50 | 0 | 1.50 | 0 | 0 |
| UPS | 0 | 0 | 88.00 | 9.50 | 0 | 2.50 |
| SIT | 0 | 0 | 15.50 | 84.50 | 0 | 0 |
| WLK | 3.50 | 0 | 0 | 0 | 86.0 | 10.50 |
| STD | 3.50 | 0 | 0 | 7.50 | 5.50 | 83.50 |
| Mean Accuracy = 88.25% | ||||||
| Dynamic Activities | WLK | CLS | STS | STR | WBF | CYC | JOG | RUN | JFB | KNB | FEA | LYD |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| WLK | 96.00 | 0 | 0 | 0 | 0 | 0 | 0 | 2.50 | 1.50 | 0 | 0 | 0 |
| CLS | 0 | 92.50 | 1.50 | 1.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0 | 2.50 | 0 | 0 |
| STS | 0 | 0 | 98.50 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1.50 |
| STR | 0.50 | 0 | 0 | 95.50 | 0 | 0 | 0 | 0 | 0 | 0 | 2.50 | 1.50 |
| WBF | 0 | 0 | 2.50 | 0 | 93.50 | 0 | 0 | 0 | 3.50 | 0 | 0 | 0.50 |
| CYC | 0 | 2.50 | 0.50 | 0 | 0 | 93.00 | 0 | 0.50 | 1.00 | 0 | 2.50 | 0 |
| JOG | 0 | 0.50 | 0 | 0 | 0 | 1.50 | 97.00 | 0 | 0.50 | 0 | 0.50 | 0 |
| RUN | 0 | 0 | 0 | 2.50 | 0.50 | 0 | 0 | 96.50 | 0 | 0 | 0.50 | 0 |
| JFB | 0 | 0 | 0 | 0 | 0 | 0 | 2.50 | 0 | 97.50 | 0 | 0 | 0 |
| KNB | 5.50 | 0 | 0 | 3.50 | 4.00 | 0 | 0.50 | 0 | 0 | 86.00 | 0 | 0.50 |
| FEA | 2.50 | 1.50 | 2.50 | 0 | 0 | 1.00 | 0.50 | 0 | 2.00 | 0.50 | 88.0 | 0.50 |
| LYD | 0 | 0 | 0 | 2.50 | 0 | 0.50 | 3.50 | 0 | 0 | 0 | 0 | 93.50 |
| Mean Accuracy = 93.95% | ||||||||||||
| Dynamic Activities | STU | WLK | CLP | BOX | RUN | STD |
|---|---|---|---|---|---|---|
| STU | 95.50 | 0 | 0 | 0 | 0 | 4.50 |
| WLK | 2.50 | 97.00 | 0 | 0 | 0.50 | 0 |
| CLP | 0 | 0 | 98.50 | 1.00 | 0.50 | 0 |
| BOX | 0 | 2.50 | 1.00 | 94.50 | 2.00 | 0 |
| RUN | 0 | 0.50 | 0.50 | 0 | 99.00 | 0 |
| STD | 3.00 | 0 | 0.50 | 0 | 0 | 96.50 |
| Mean Accuracy = 96.83% | ||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jalal, A.; Batool, M.; Kim, K. Stochastic Recognition of Physical Activity and Healthcare Using Tri-Axial Inertial Wearable Sensors. Appl. Sci. 2020, 10, 7122. https://doi.org/10.3390/app10207122
Jalal A, Batool M, Kim K. Stochastic Recognition of Physical Activity and Healthcare Using Tri-Axial Inertial Wearable Sensors. Applied Sciences. 2020; 10(20):7122. https://doi.org/10.3390/app10207122
Chicago/Turabian StyleJalal, Ahmad, Mouazma Batool, and Kibum Kim. 2020. "Stochastic Recognition of Physical Activity and Healthcare Using Tri-Axial Inertial Wearable Sensors" Applied Sciences 10, no. 20: 7122. https://doi.org/10.3390/app10207122
APA StyleJalal, A., Batool, M., & Kim, K. (2020). Stochastic Recognition of Physical Activity and Healthcare Using Tri-Axial Inertial Wearable Sensors. Applied Sciences, 10(20), 7122. https://doi.org/10.3390/app10207122