Intelligent Fault Diagnosis Method Using Acoustic Emission Signals for Bearings under Complex Working Conditions




Abstract
1. Introduction
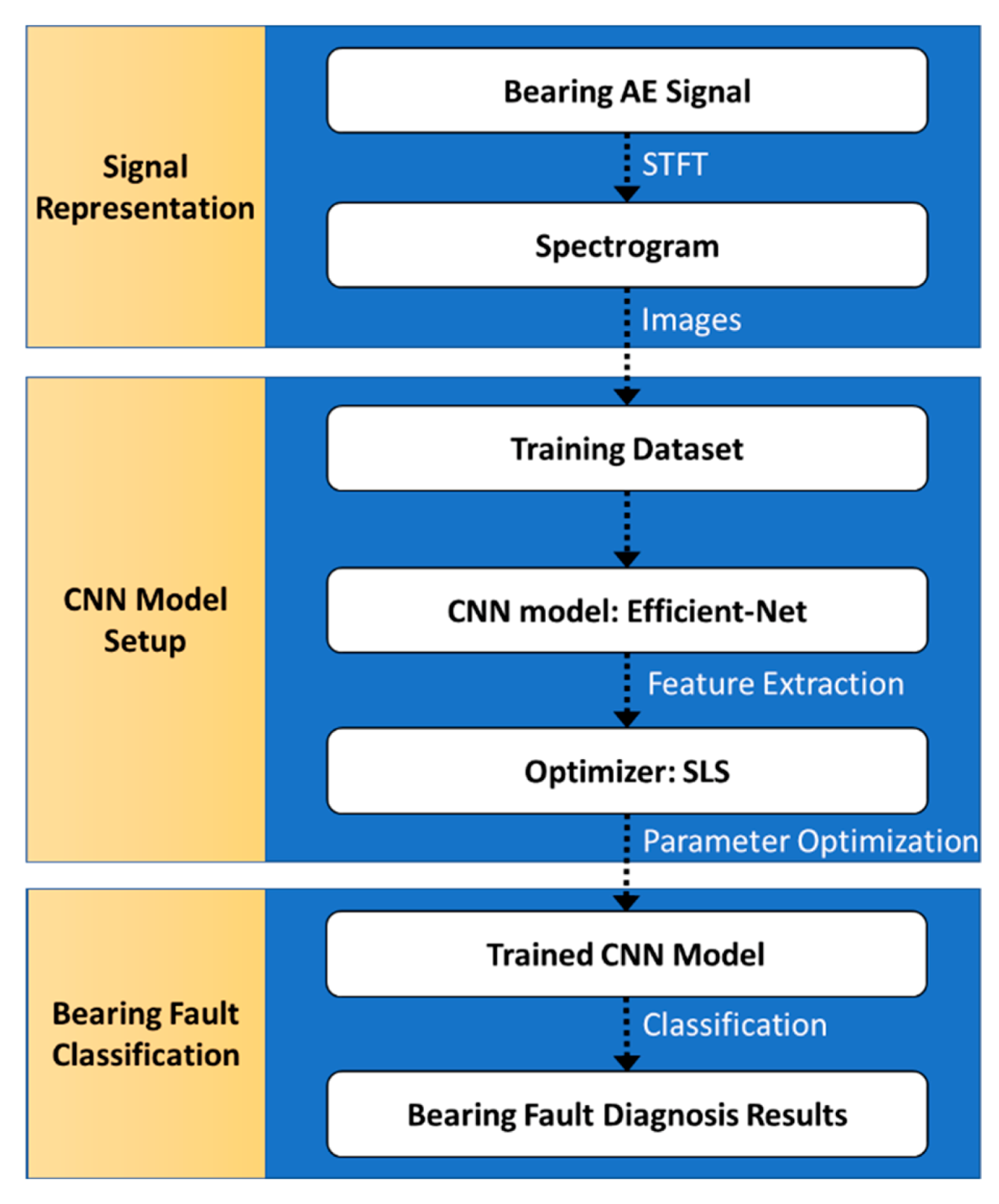
2. Proposed Bearing Fault Diagnosis Method using Acoustic Emission Signals
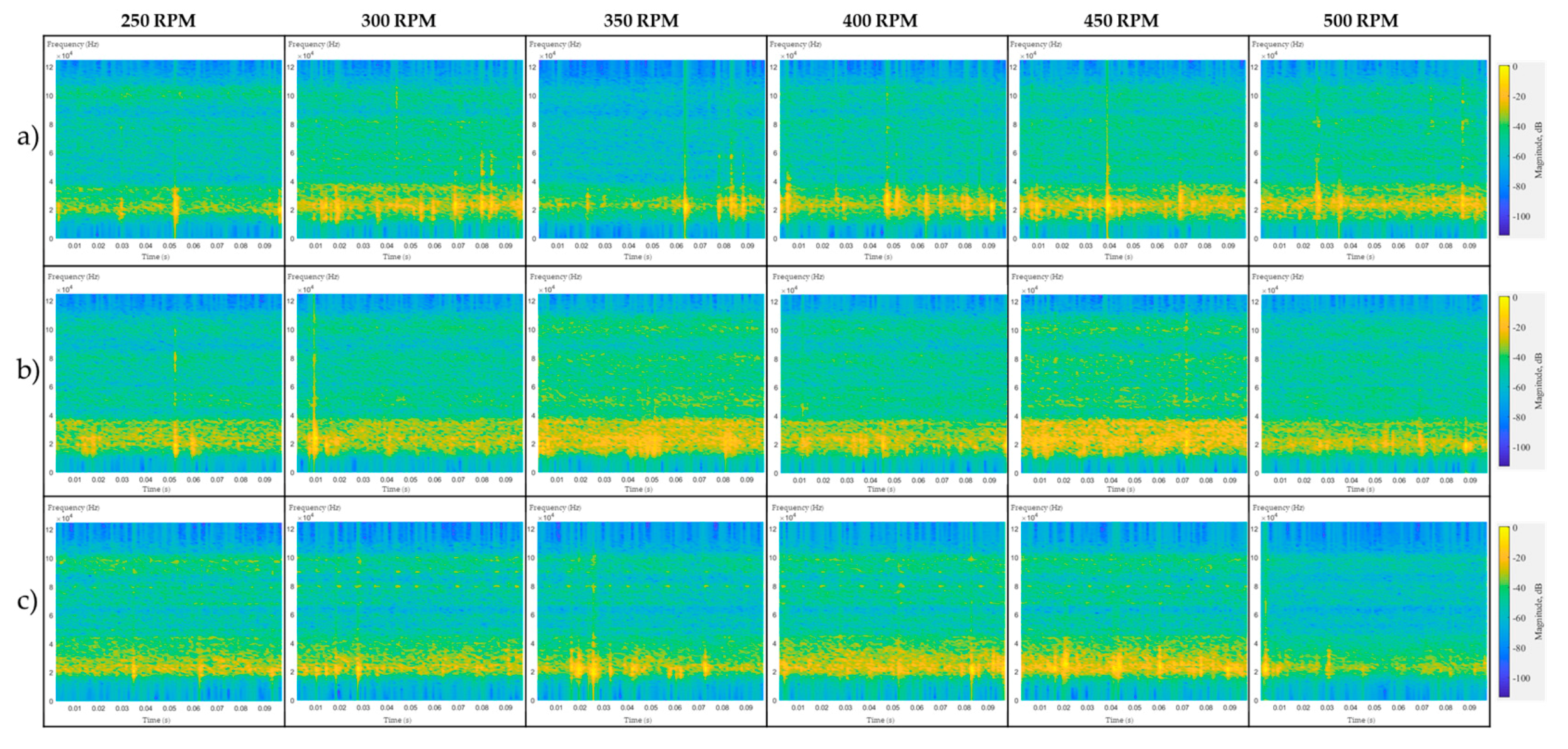
2.1. Short-Time Fourier Transform (STFT)
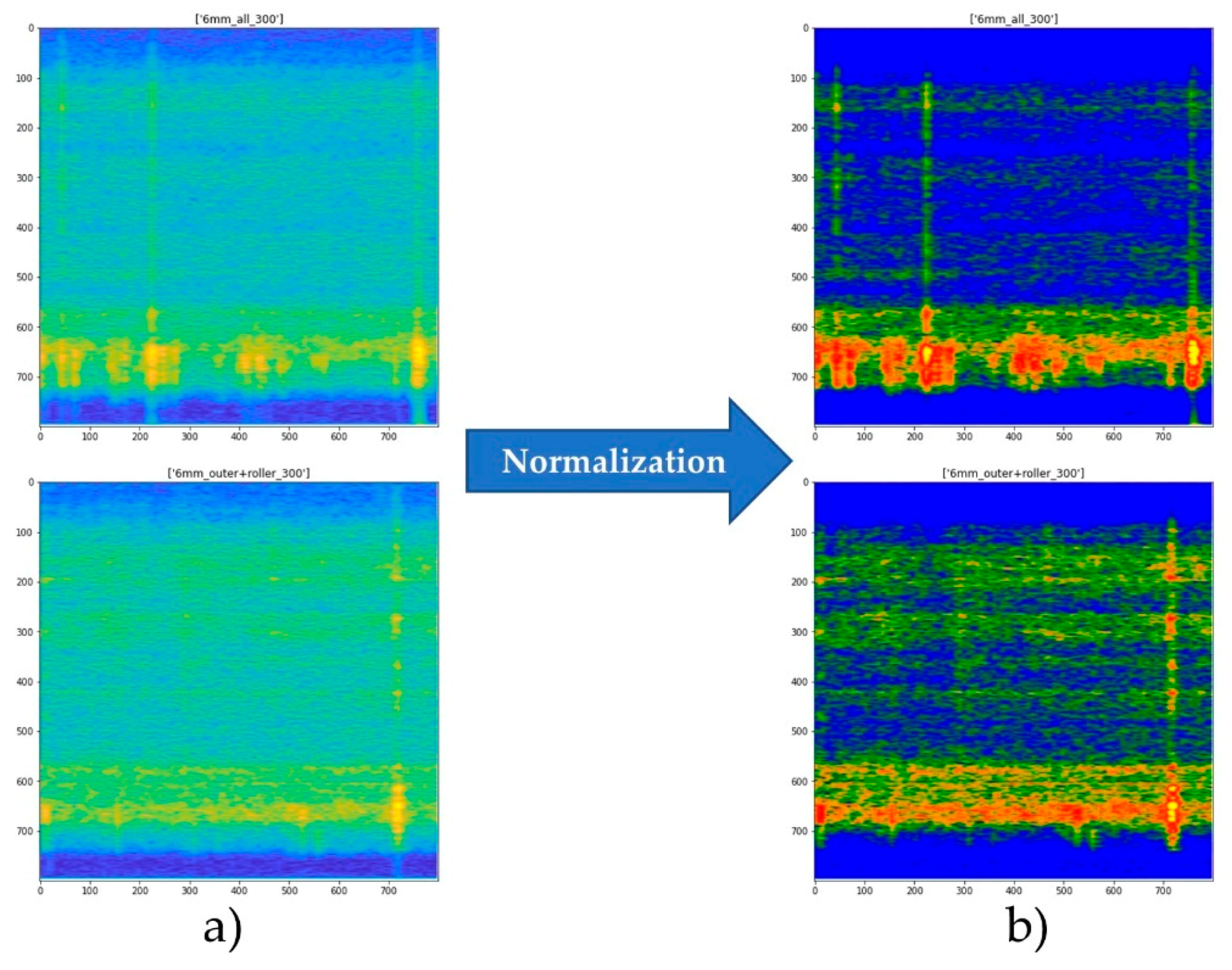
2.2. Creating and Processing Bearing Faults Spectrograms
2.3. EfficientNet CNN Model for Bearing Fault Diagnosis
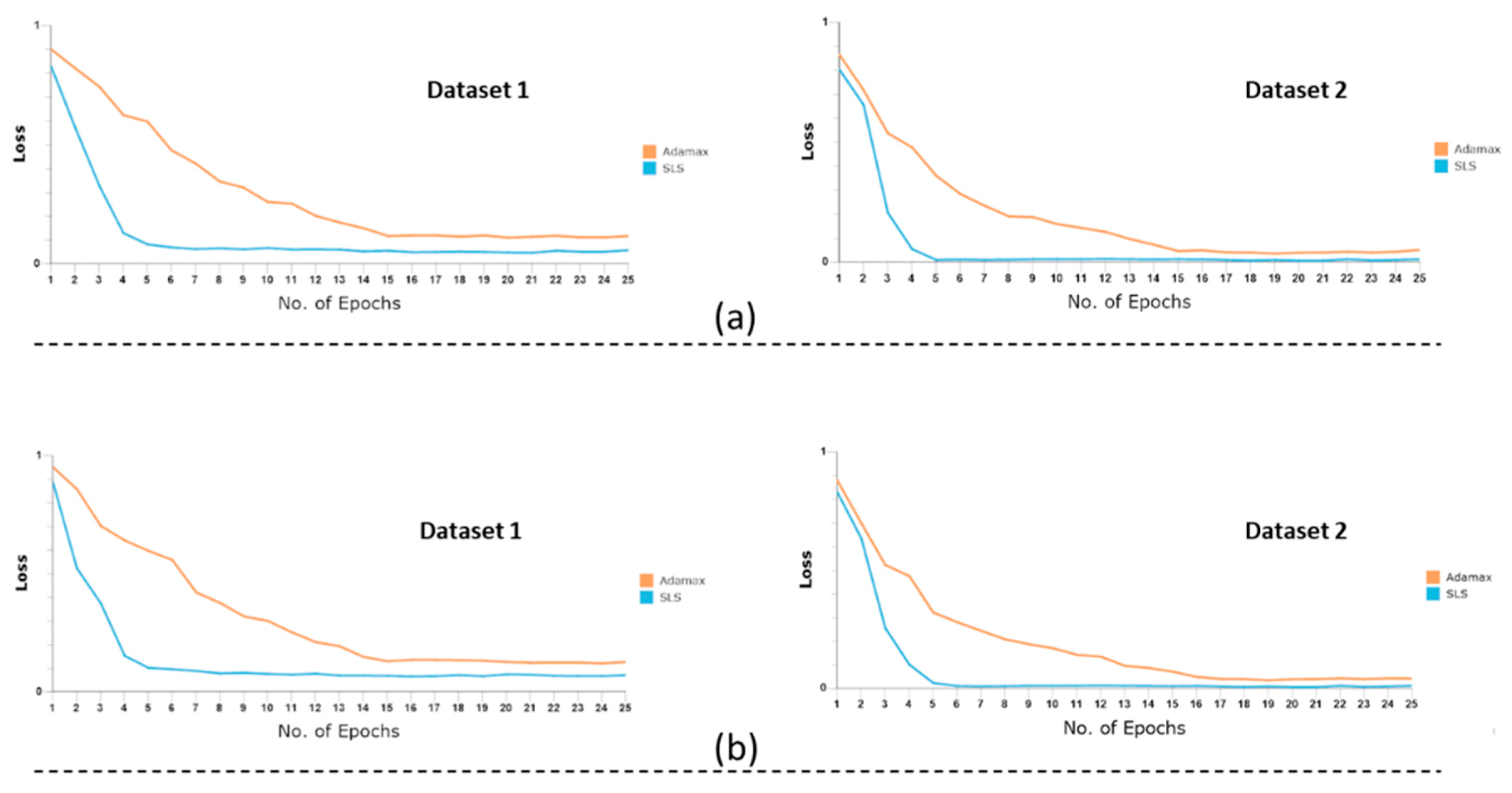
2.4. Stochastic Line Search Optimizer
- Compute the gradients for a given training batch.
- Search for a step size that satisfies the stochastic Armijo line search condition.
- Use the step size and update the model parameters with SGD:
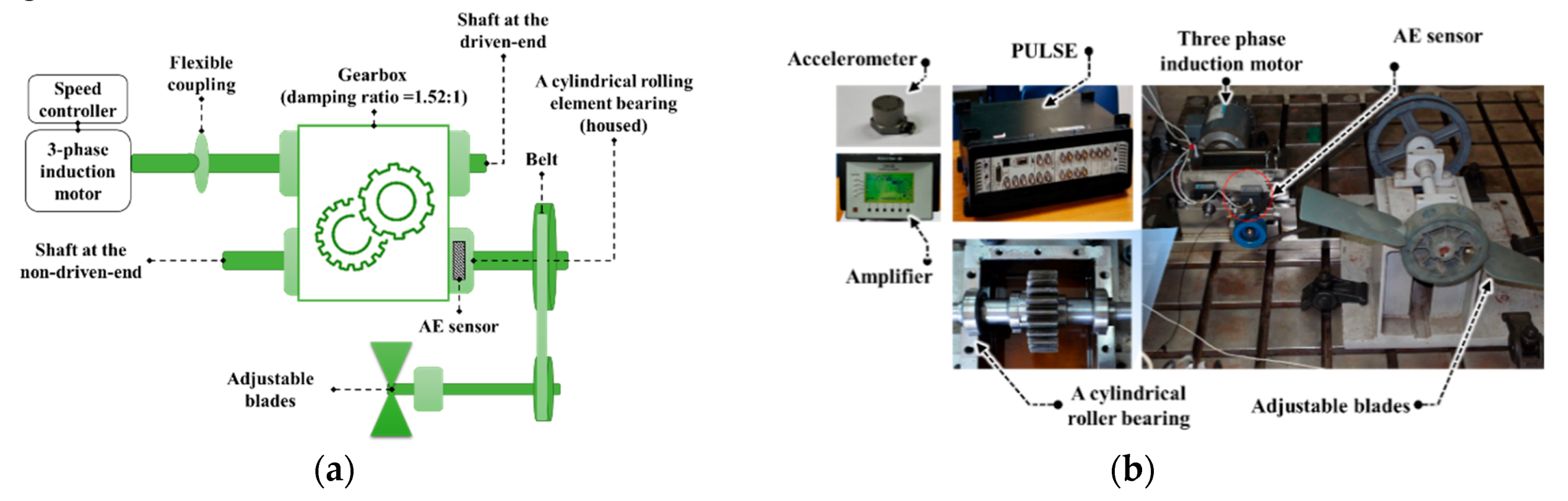
3. Experimental Implementation
4. Experimental Results
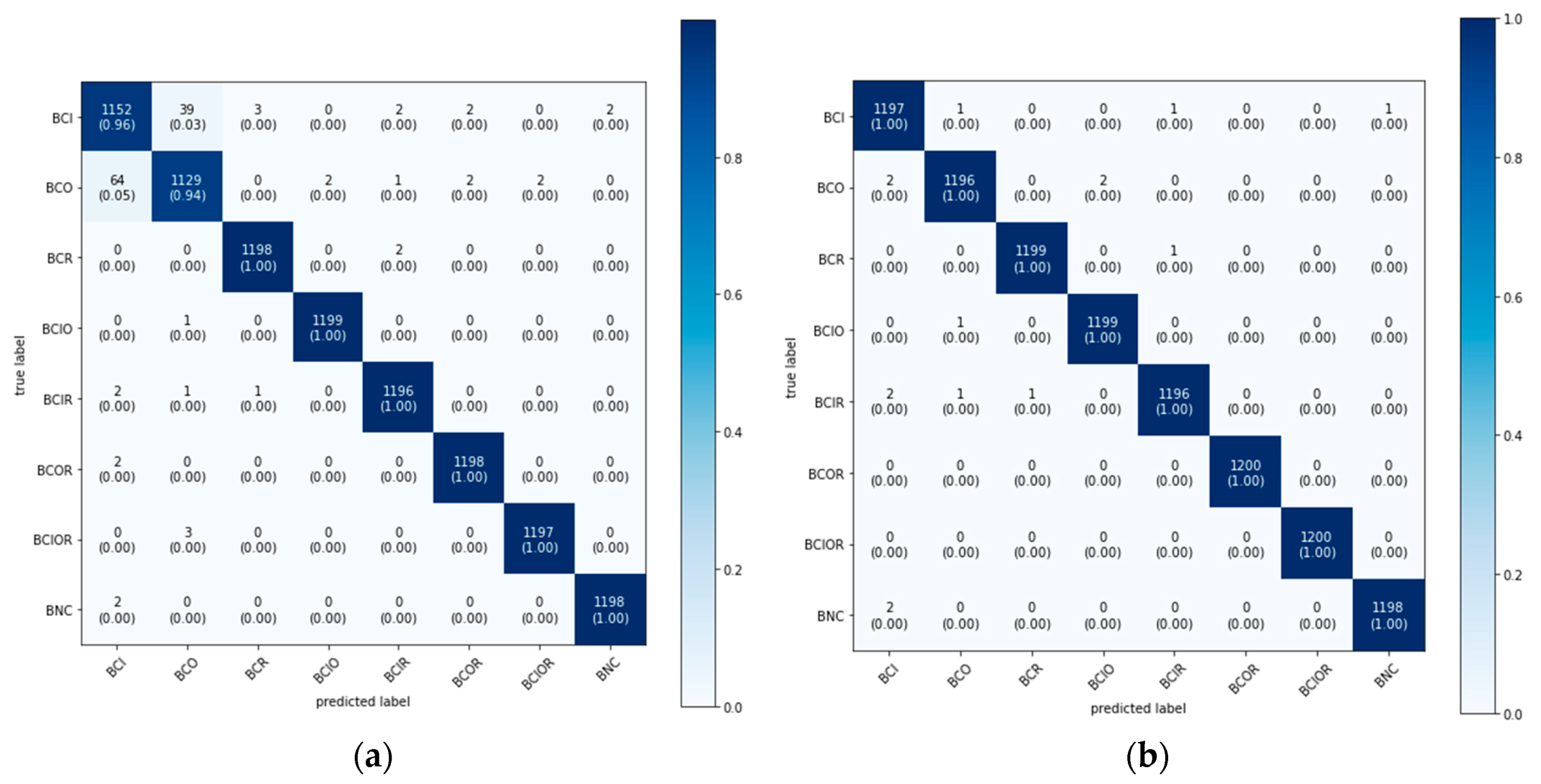
4.1. Diagnosis Accuracy for Compound Bearing Faults
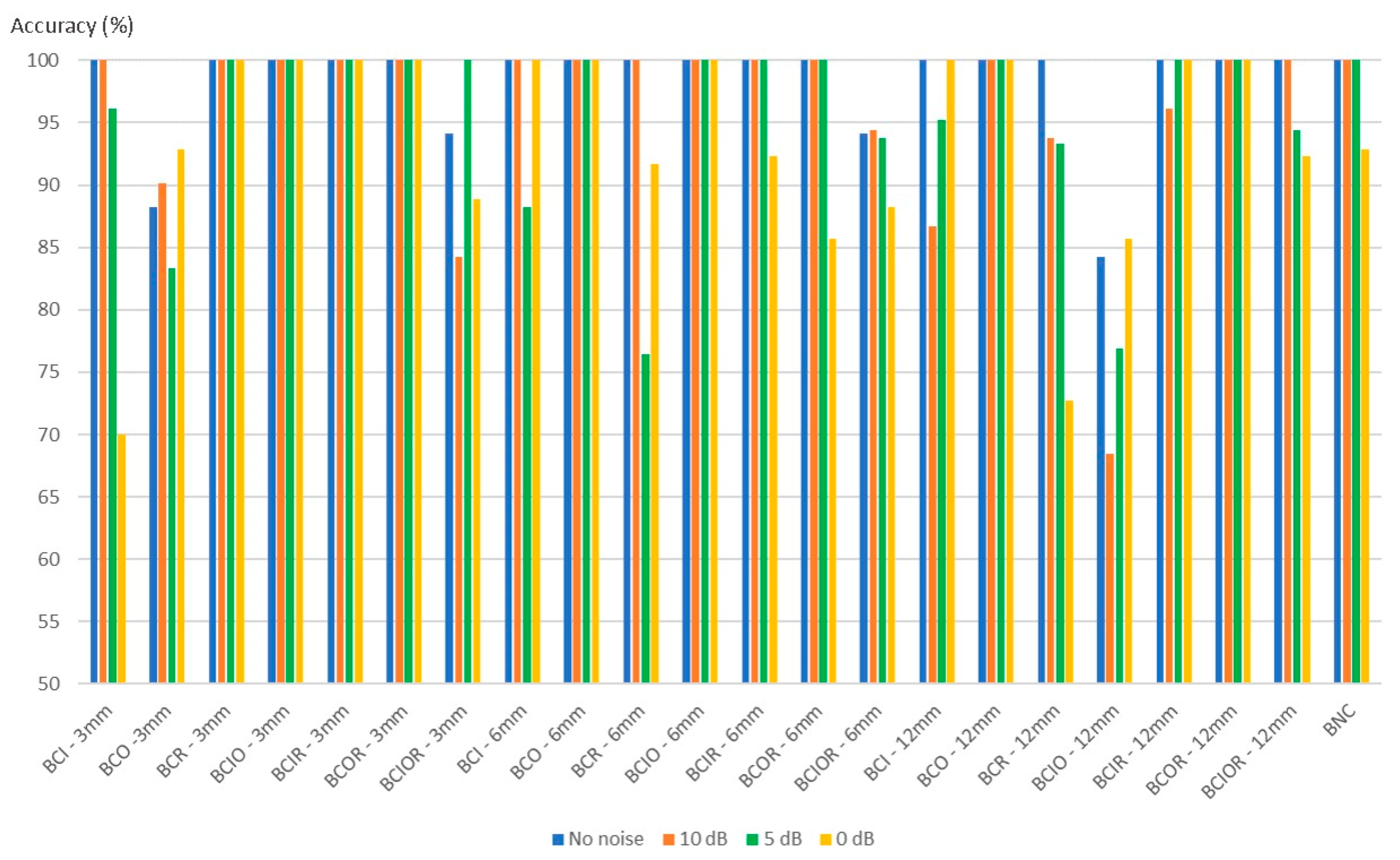
4.2. Compound Fault Diagnosis in Noisy Conditions
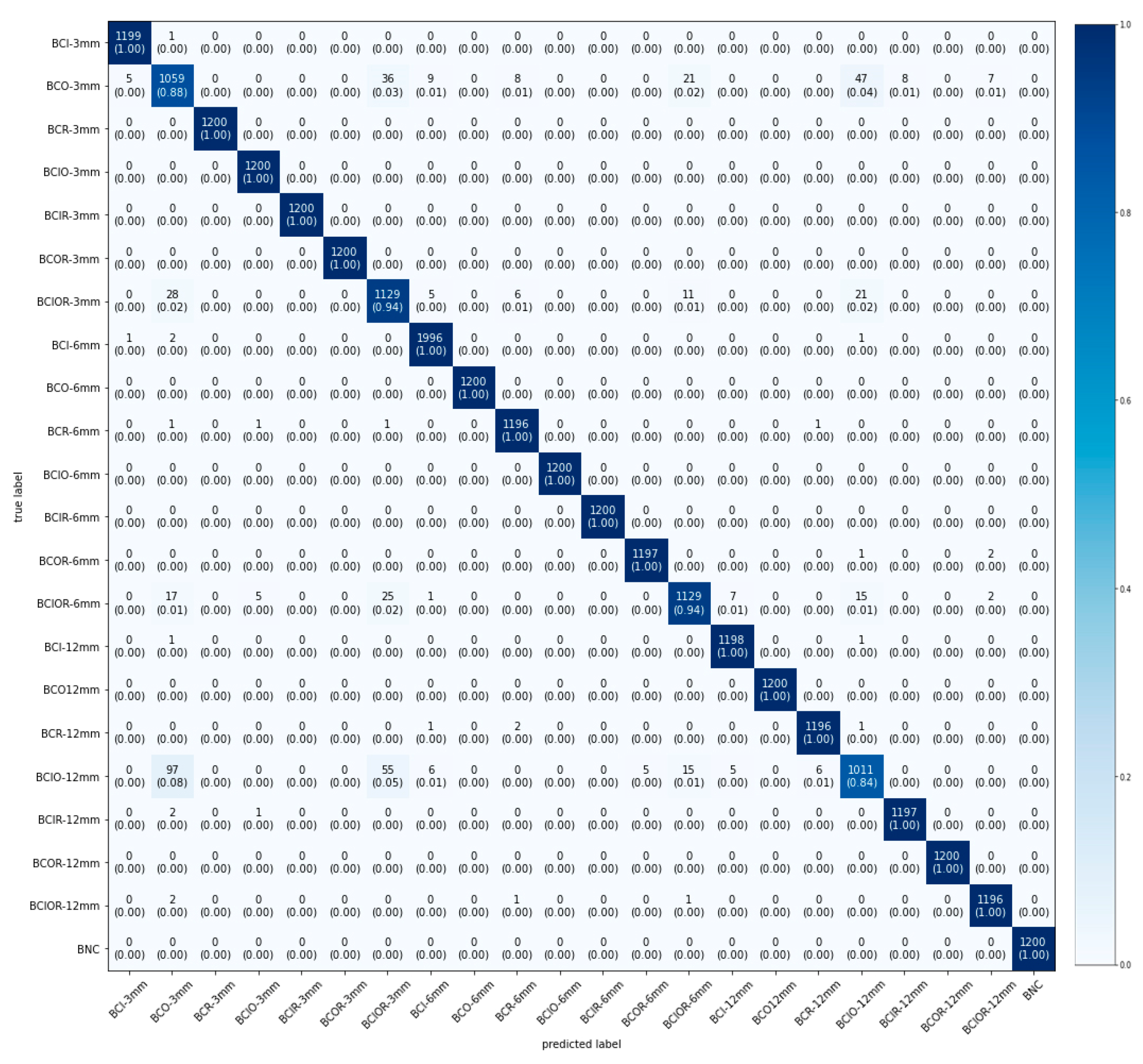
4.3. Classifying Compound Faults and Fault Degradation Levels
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lu, S.; Qian, G.; He, Q.; Liu, F.; Liu, Y.; Wang, Q. In Situ Motor Fault Diagnosis Using Enhanced Convolutional Neural Network in an Embedded System. IEEE Sens. J. 2020, 20, 8287–8296. [Google Scholar] [CrossRef]
- Albrecht, P.F.; Appiarius, J.C.; McCoy, R.M.; Owen, E.L.; Sharma, D.K. Assessment of the Reliability of Motors in Utility Applications—Updated. IEEE Trans. Energy Convers. 1986, EC-1, 39–46. [Google Scholar] [CrossRef]
- Kang, M.; Islam, M.R.; Kim, J.; Kim, J.; Pecht, M. A Hybrid Feature Selection Scheme for Reducing Diagnostic Performance Deterioration Caused by Outliers in Data-Driven Diagnostics. IEEE Trans. Ind. Electron. 2016, 63, 3299–3310. [Google Scholar] [CrossRef]
- Islam, M.M.M.; Islam, M.R.; Kim, J.-M. A Hybrid Feature Selection Scheme Based on Local Compactness and Global Separability for Improving Roller Bearing Diagnostic Performance. Artif. Life Comput. Intell. 2017, 180–192. [Google Scholar] [CrossRef]
- Pham, M.T.; Kim, J.M.; Kim, C.H. Accurate Bearing Fault Diagnosis under Variable Shaft Speed using Convolutional Neural Networks and Vibration Spectrogram. Appl. Sci. 2020, 10, 6385. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. Rolling element bearing fault diagnosis using convolutional neural network and vibration image. Cogn. Syst. Res. 2019, 53, 42–50. [Google Scholar] [CrossRef]
- Neupane, D.; Seok, J. Bearing Fault Detection and Diagnosis Using Case Western Reserve University Dataset With Deep Learning Approaches: A Review. IEEE Access 2020, 8, 93155–93178. [Google Scholar] [CrossRef]
- Zimroz, R.; Bartelmus, W.; Barszcz, T.; Urbanek, J. Wind Turbine Main Bearing Diagnosis—A Proposal of Data Processing and Decision Making Procedure under Non Stationary Load Condition. Key Eng. Mater. 2012, 518, 437–444. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, W.; Chu, F. Planet gear fault localization for wind turbine gearbox using acoustic emission signals. Renew. Energy 2017, 109, 449–460. [Google Scholar] [CrossRef]
- Tra, J.K.V.; Kim, J.-M. Fault Diagnosis of Bearings with Variable Rotational Speeds Using Convolutional Neural Networks; Springer: Singapore, 2019; Volume 759. [Google Scholar]
- Tra, V.; Khan, S.; Kim, J. Diagnosis of bearing defects under variable speed conditions using energy distribution maps of acoustic emission spectra and convolutional neural networks. J. Acoust. Soc. Am. 2018, 144, EL322–EL327. [Google Scholar] [CrossRef] [PubMed]
- Tan, M.; Le, Q.V. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. May 2019. Available online: http://arxiv.org/abs/1905.11946 (accessed on 1 September 2020).
- Vaswani, S.; Mishkin, A.; Laradji, I.; Schmidt, M.; Gidel, G.; Lacoste-Julien, S. Painless Stochastic Gradient: Interpolation, Line-Search, and Convergence Rates. 2019. Available online: http://arxiv.org/abs/1905.09997 (accessed on 1 September 2020).
- Kehtarnavaz, N. Frequency Domain Processing. In Digital Signal Processing System Design; Elsevier: Amsterdam, The Netherlands, 2008; pp. 175–196. [Google Scholar]
- Zhivomirov, H. On the development of STFT-analysis and ISTFT-synthesis routines and their practical implementation. TEM J. 2019, 8, 56–64. [Google Scholar] [CrossRef]
- Digital Image Processing. 2007. Available online: https://researchgate.net/publication/333856607_Digital_Image_Processing_Second_Edition (accessed on 1 September 2020).
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. MobileNetV2: Inverted Residuals and Linear Bottlenecks; IEEE: Salt Lake City, UT, USA, 2018. [Google Scholar]
- Hu, J.; Shen, L.; Albanie, S.; Sun, G.; Wu, E. Squeeze-and-Excitation Networks. September 2017. Available online: http://arxiv.org/abs/1709.01507 (accessed on 1 September 2020).
- Ruder, S. An Overview of Gradient Descent Optimization Algorithms. September 2016. Available online: http://arxiv.org/abs/1609.04747 (accessed on 1 September 2020).
- Sohaib, M.; Kim, J.M. Fault Diagnosis of Rotary Machine Bearings under Inconsistent Working Conditions. IEEE Trans. Instrum. Meas. 2020, 69, 3334–3347. [Google Scholar] [CrossRef]
- Paquette, C.; Scheinberg, K. A Stochastic Line Search Method with Convergence Rate Analysis. July 2018. Available online: http://arxiv.org/abs/1807.07994 (accessed on 1 September 2020).
- Tra, V.; Kim, J.; Khan, S.A.; Kim, J.-M. Incipient fault diagnosis in bearings under variable speed conditions using multiresolution analysis and a weighted committee machine. J. Acoust. Soc. Am. 2017, 142, EL35. [Google Scholar] [CrossRef] [PubMed]
- Kingma, D.P.; Ba, J.L. Adam: A method for stochastic optimization. In Proceedings of the 3rd International Conference for Learning Representations, ICLR 2015—Conference Track Proceedings, San Diego, CA, USA, 7–9 May 2015; pp. 1–15. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AE sensor (PAC WSα) | Peak sensitivity (V/μbar): −62 dB Operating frequency range: 100–900 kHz Resonant frequency: 650 kHz Directionality: ±1.5 dB |
| 2-channel PCI board | 18-bit 40 MHz A/D conversion 10M samples/s rate as only one channel is used (5M samples/s as two channels are used simultaneously) Dynamic range: >85 dB Sensor testing: AST build-in |
| Single and Compound Bearing Failures | Rotational Speed (RPM) | Crack Size | |||
|---|---|---|---|---|---|
| Length (mm) | Width (mm) | Depth (mm) | |||
| Dataset 1 | Training subset | 300, 400, 500 | 3 | 0.60 | 0.30 |
| Testing subset (and Validation) | 250, 350, 450 | ||||
| Dataset 2 | Training subset | 300, 400, 500 | 12 | 0.60 | 0.50 |
| Testing subset (and Validation) | 250, 350, 450 | ||||
| Dataset 3 | Training subset | 300, 400, 500 | 3 | 0.60 | 0.30 |
| 6 | 0.60 | 0.50 | |||
| Testing subset (and Validation) | 250, 350, 450 | ||||
| 12 | 0.60 | 0.50 | |||
| Methodologies | Average Accuracy for Each Fault Type (%) | ACA (%) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| BCI | BCO | BCR | BCIO | BCIR | BCOR | BCIOR | BNC | |||
| Dataset 1 | Proposed method | 96.00 | 94.12 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 98.77 |
| [11] | 100.00 | 98.88 | 98.51 | 97.77 | 95.18 | 100.00 | 100.00 | 99.62 | 98.74 | |
| [10] | 66.60 | 100.00 | 100.00 | 100.00 | 89.10 | 99.20 | 99.20 | 99.60 | 94.20 | |
| [22] | 11.11 | 13.33 | 100.00 | 100.00 | 97.77 | 97.77 | 66.21 | 22.41 | 63.57 | |
| [3] | 19.62 | 47.40 | 75.18 | 47.03 | 59.62 | 30.74 | 49.76 | 58.62 | 48.49 | |
| Dataset 2 | Proposed method | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 |
| [11] | 100.00 | 100.00 | 98.51 | 95.47 | 99.18 | 100.00 | 98.88 | 99.62 | 98.95 | |
| [10] | 100.00 | 100.00 | 91.80 | 98.10 | 99.20 | 99.20 | 100.00 | 99.20 | 98.40 | |
| [22] | 24.34 | 26.47 | 97.77 | 97.77 | 100.00 | 100.00 | 68.24 | 28.16 | 67.84 | |
| [3] | 7.03 | 70.00 | 66.66 | 79.62 | 5.92 | 44.81 | 74.07 | 62.96 | 51.38 | |
| Dataset | SNR (dB) | Class Wise Accuracy (%) | Average Accuracy | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| BCI | BCO | BCR | BCIO | BCIR | BCOR | BCIOR | BNC | |||
| Dataset 1 | 10 | 100.00 | 100.00 | 100.00 | 100.00 | 92.86 | 100.00 | 100.00 | 87.50 | 97.55 |
| 5 | 85.71 | 92.31 | 100.00 | 100.00 | 100.00 | 100.00 | 100.00 | 91.67 | 96.21 | |
| 0 | 83.33 | 77.78 | 100.00 | 100.00 | 100.00 | 72.73 | 91.67 | 93.33 | 89.85 | |
| Dataset 2 | 10 | 100.00 | 100.00 | 100.00 | 91.82 | 94.12 | 100.00 | 100.00 | 100.00 | 98.24 |
| 5 | 80.00 | 100.00 | 100.00 | 80.00 | 100.00 | 92.31 | 100.00 | 100.00 | 94.03 | |
| 0 | 90.91 | 88.24 | 81.82 | 94.12 | 90.91 | 100 | 100.00 | 90.91 | 92.11 | |
| Dataset 3 | SNR (dB) | Average Accuracy (%) |
| No noise | 98.21 | |
| 10 | 96.08 | |
| 5 | 95.36 | |
| 0 | 93.33 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, M.T.; Kim, J.-M.; Kim, C.H. Intelligent Fault Diagnosis Method Using Acoustic Emission Signals for Bearings under Complex Working Conditions. Appl. Sci. 2020, 10, 7068. https://doi.org/10.3390/app10207068
Pham MT, Kim J-M, Kim CH. Intelligent Fault Diagnosis Method Using Acoustic Emission Signals for Bearings under Complex Working Conditions. Applied Sciences. 2020; 10(20):7068. https://doi.org/10.3390/app10207068
Chicago/Turabian StylePham, Minh Tuan, Jong-Myon Kim, and Cheol Hong Kim. 2020. "Intelligent Fault Diagnosis Method Using Acoustic Emission Signals for Bearings under Complex Working Conditions" Applied Sciences 10, no. 20: 7068. https://doi.org/10.3390/app10207068
APA StylePham, M. T., Kim, J.-M., & Kim, C. H. (2020). Intelligent Fault Diagnosis Method Using Acoustic Emission Signals for Bearings under Complex Working Conditions. Applied Sciences, 10(20), 7068. https://doi.org/10.3390/app10207068