Dielectric Elastomer Actuator for Soft Robotics Applications and Challenges

 ,
, 
Abstract
Featured Application
Abstract
1. Introduction
2. Working Principle and Characteristics
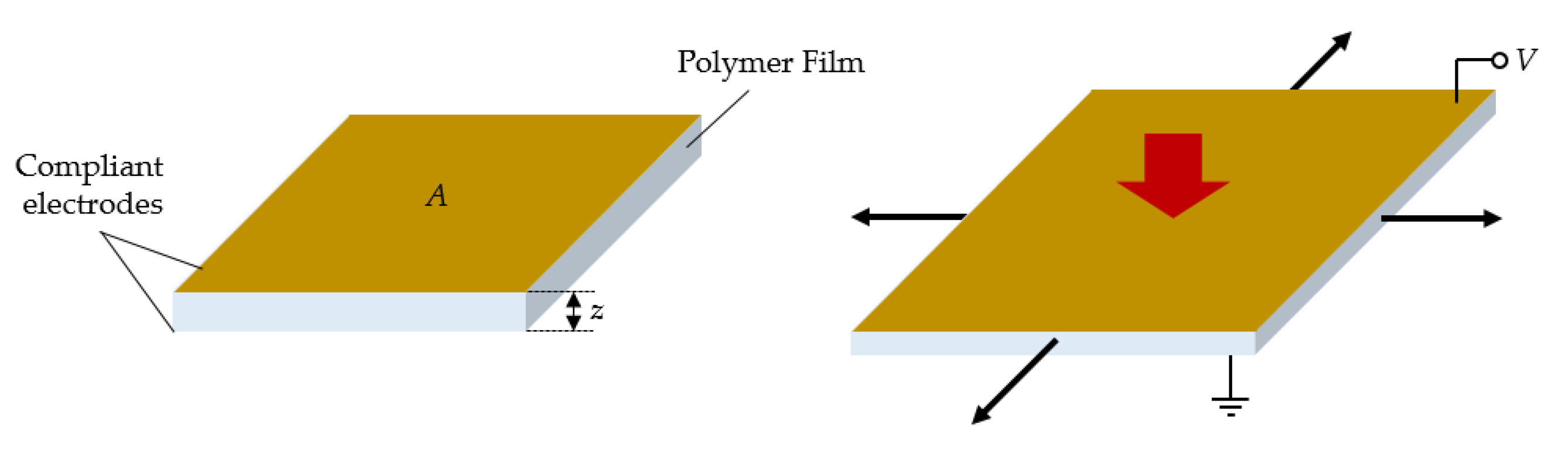
2.1. Working Principle
2.2. DE Materials
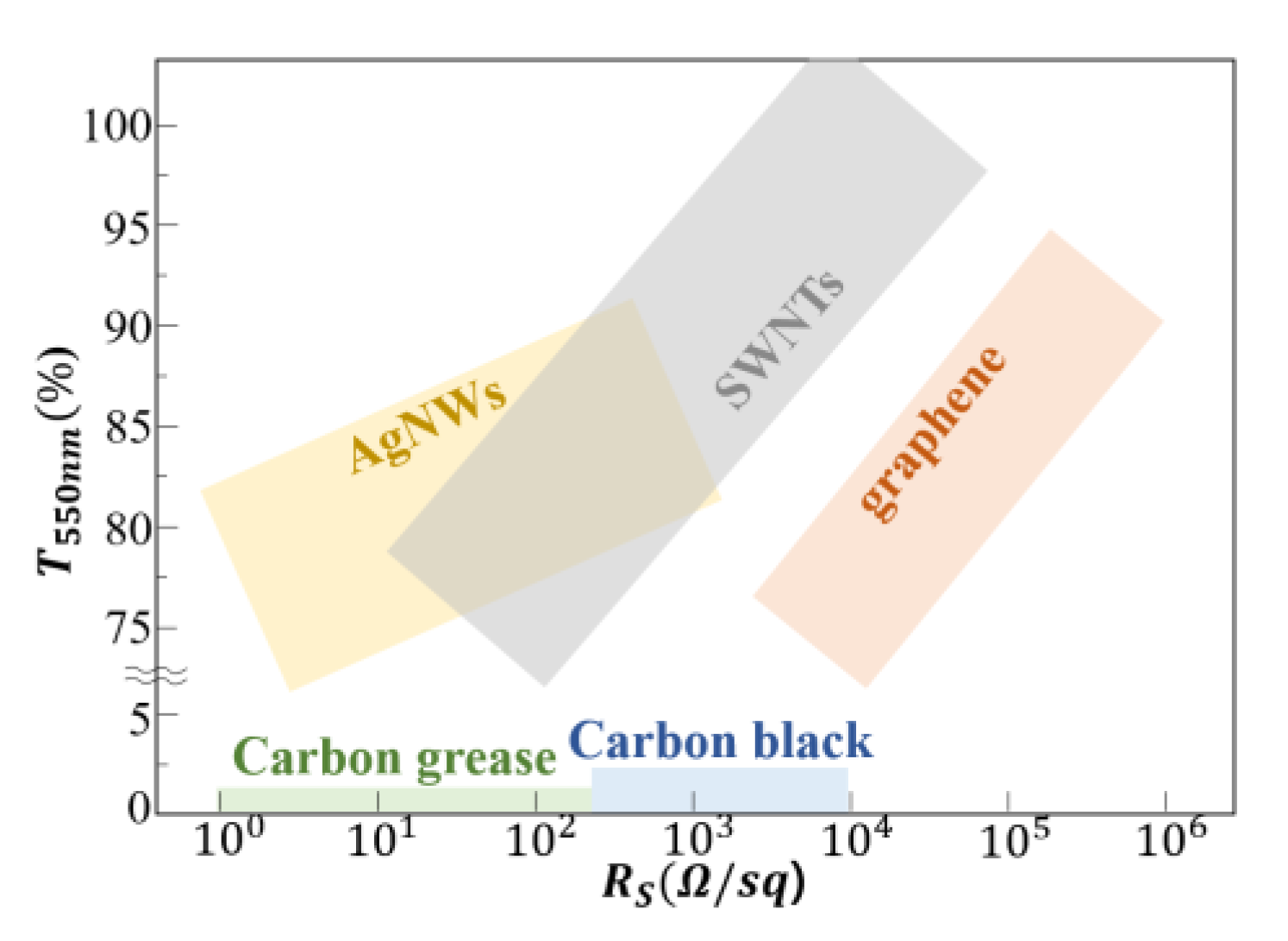
2.3. Compliant Electrodes
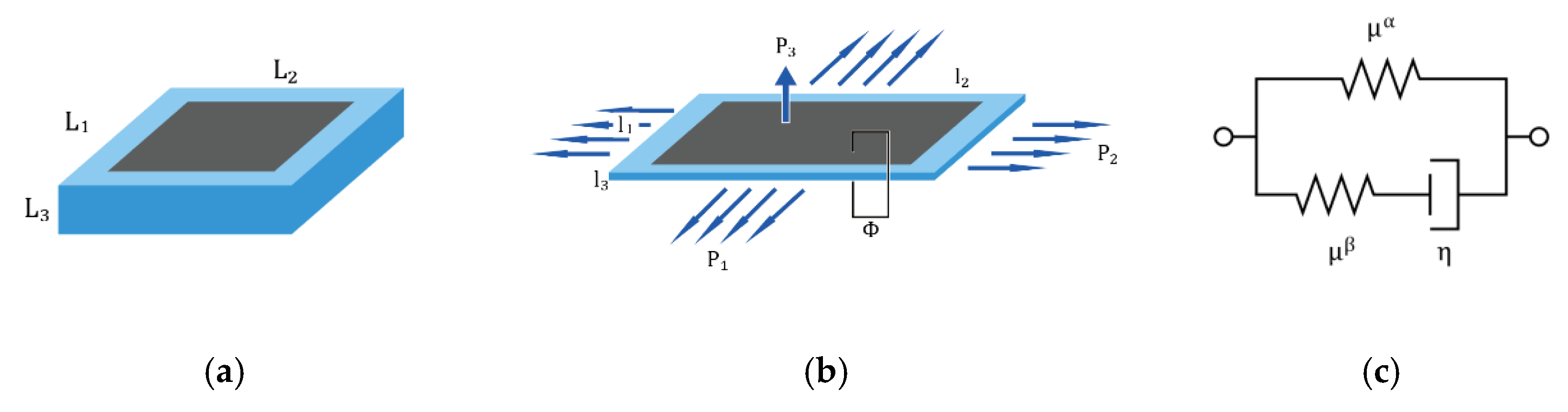
3. Modeling of DEA
4. Artificial Muscle Design and Fabrication
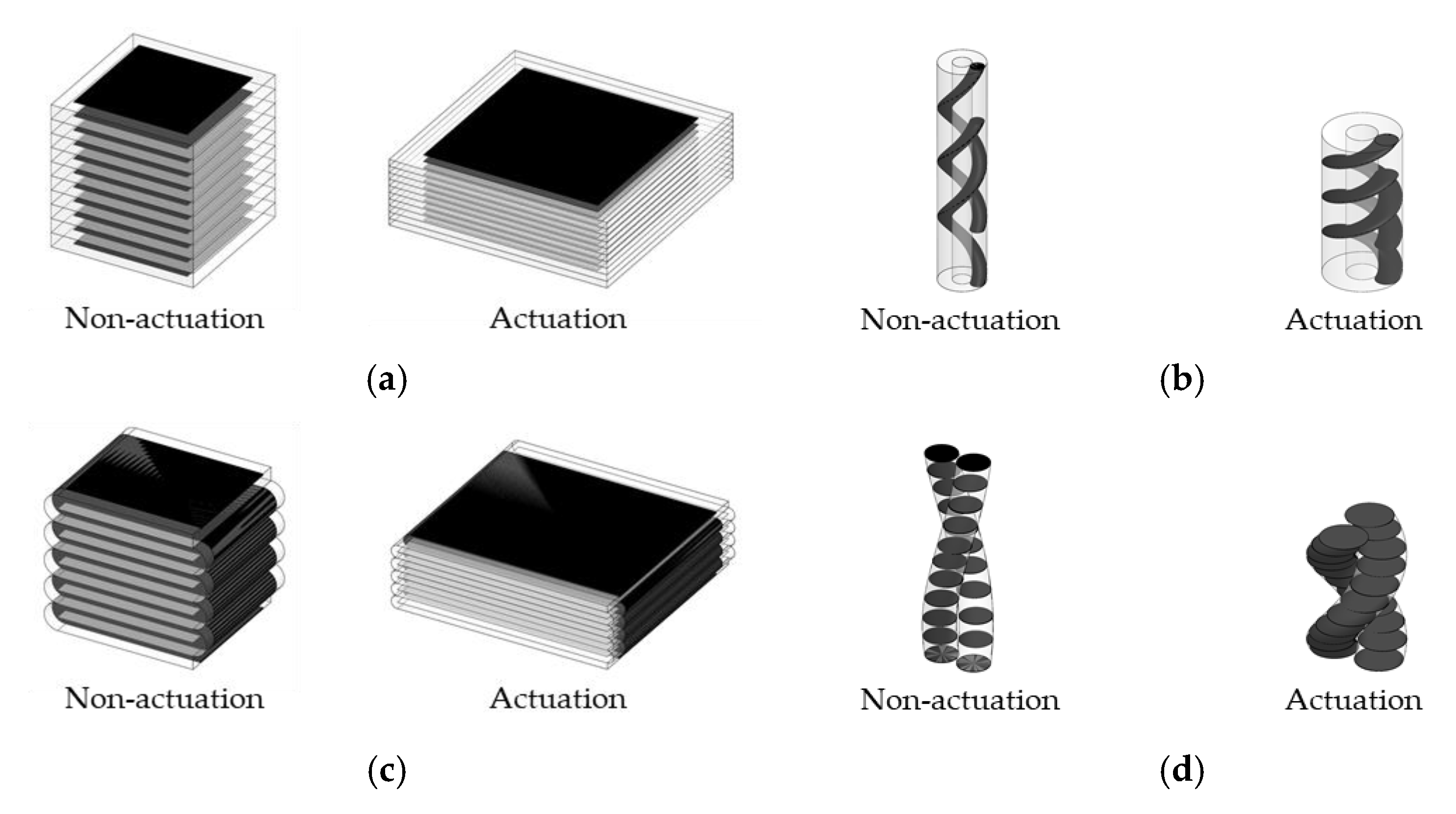
4.1. Linear Contraction DEA
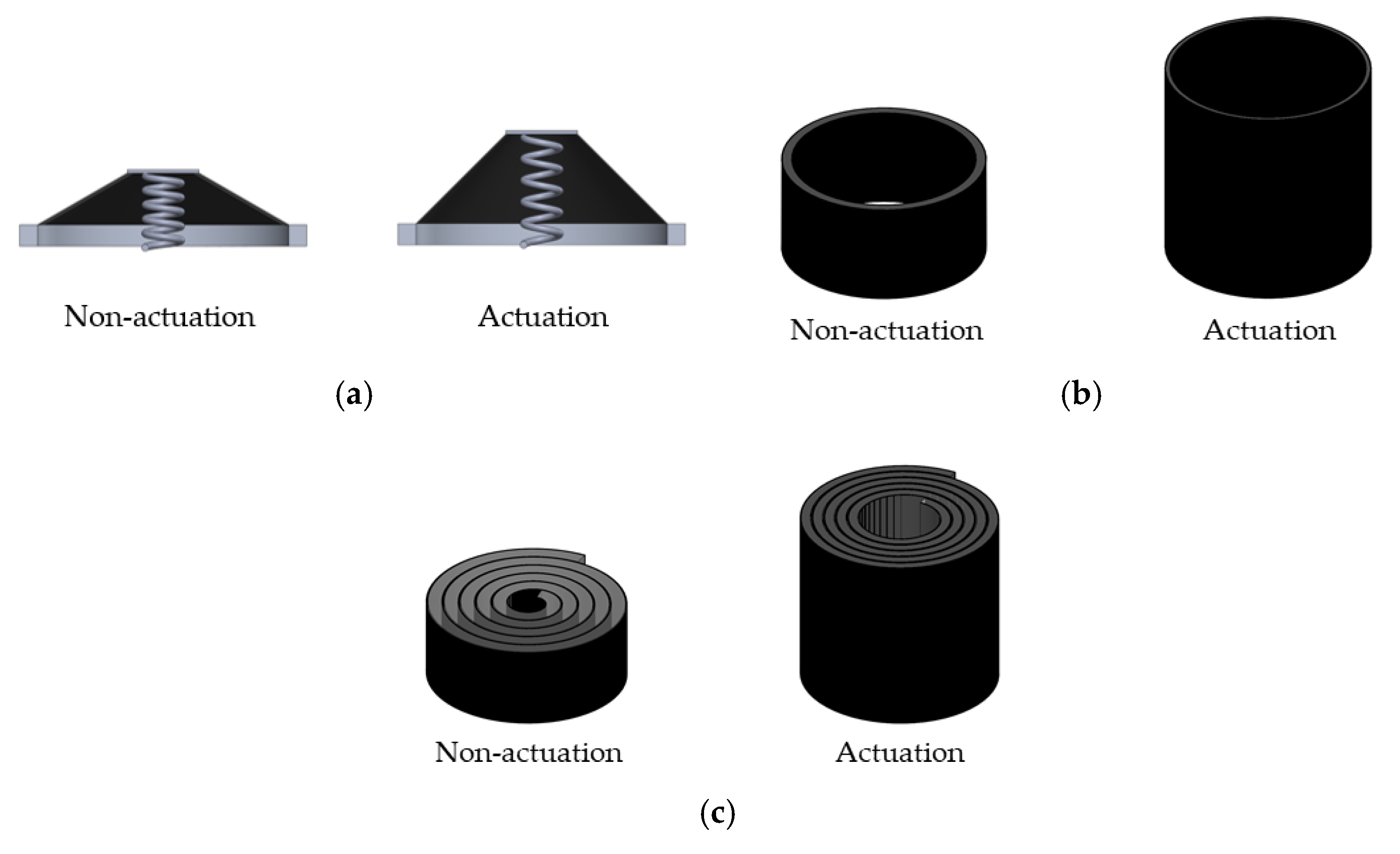
4.2. Linear Expansion DEA
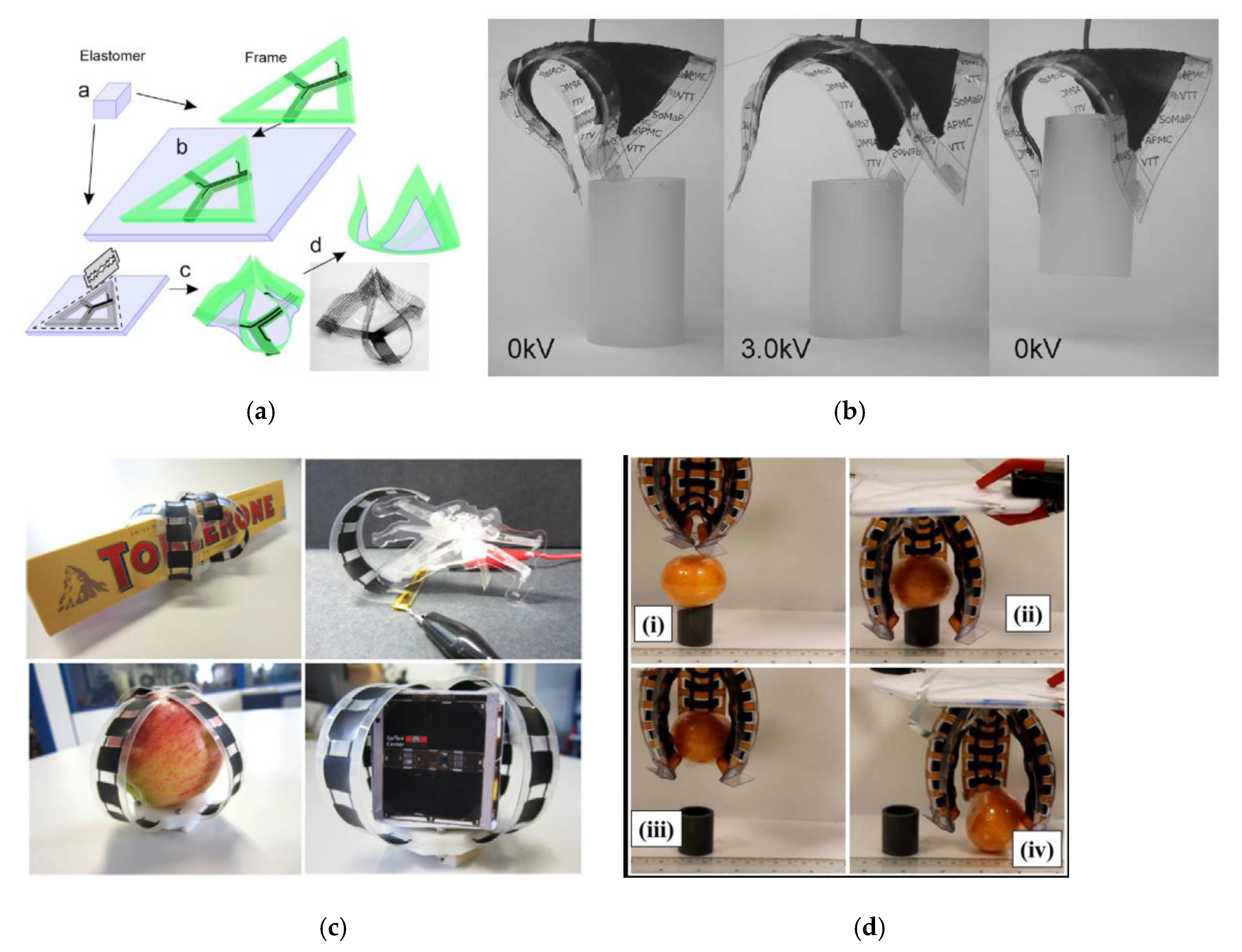
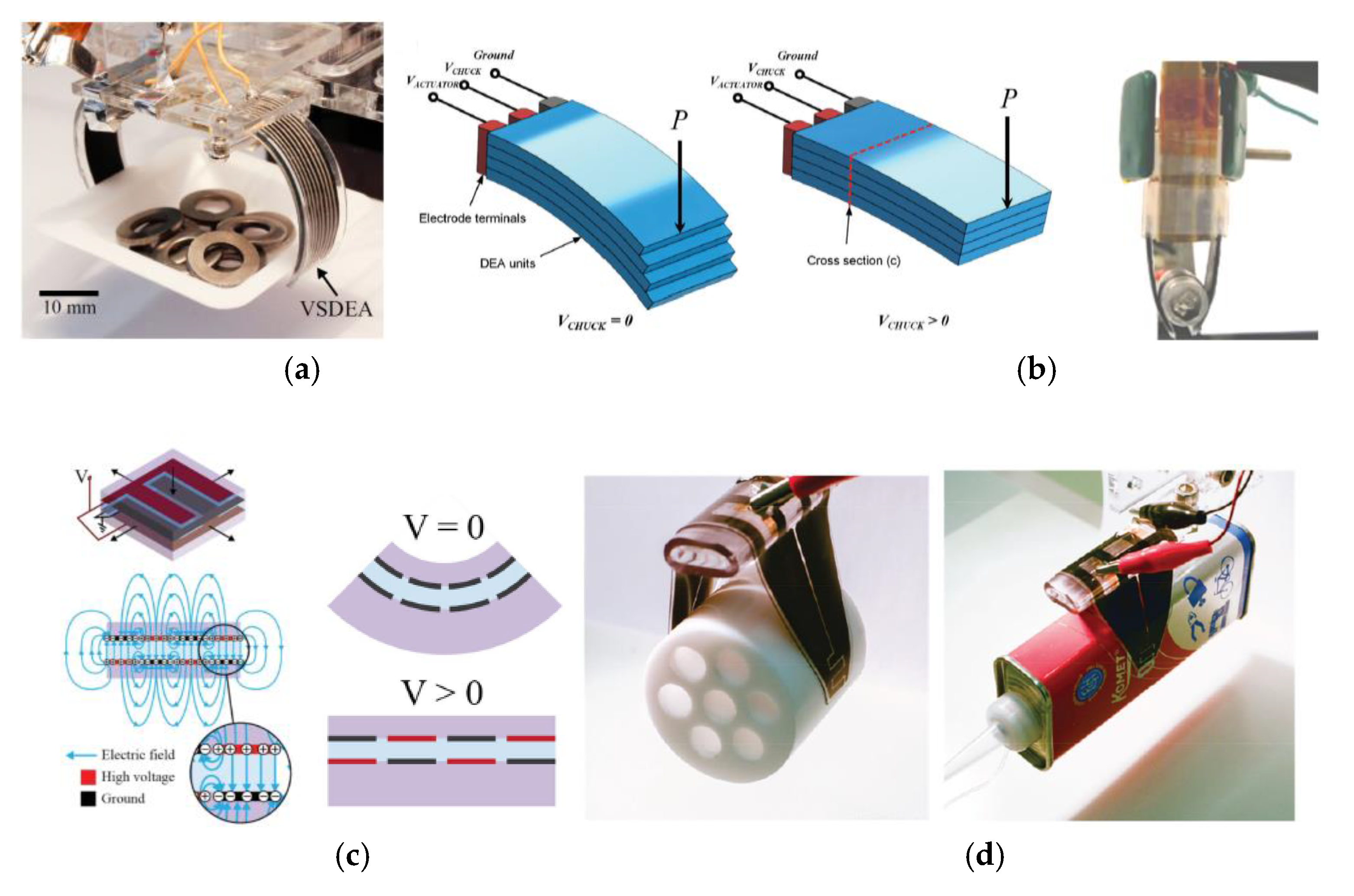
5. Soft Robot Hand and Gripper
6. Locomotion: Mobility Design
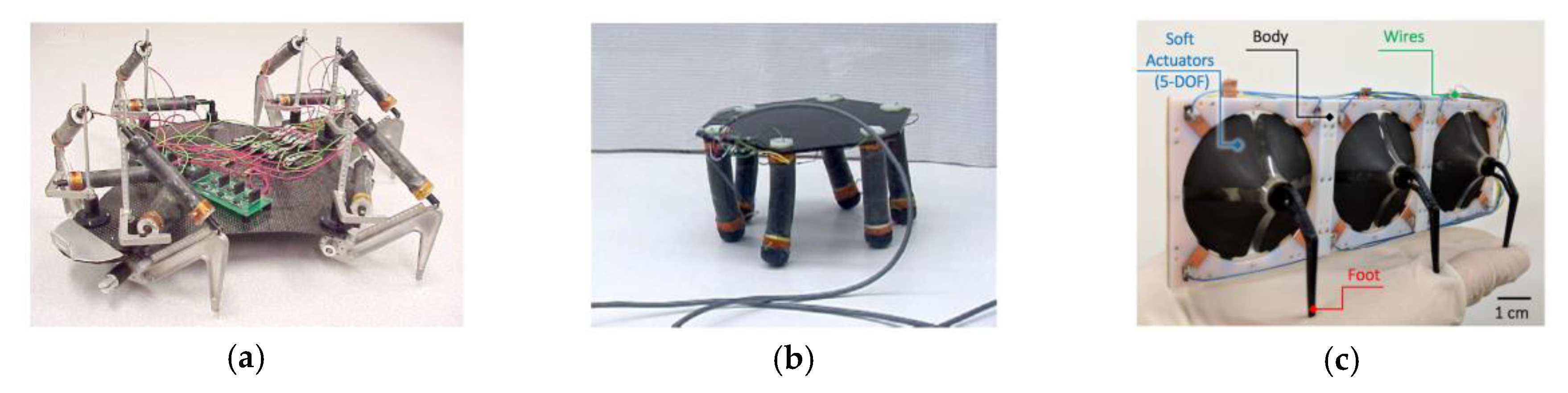
6.1. Insect-Like Walking Robot
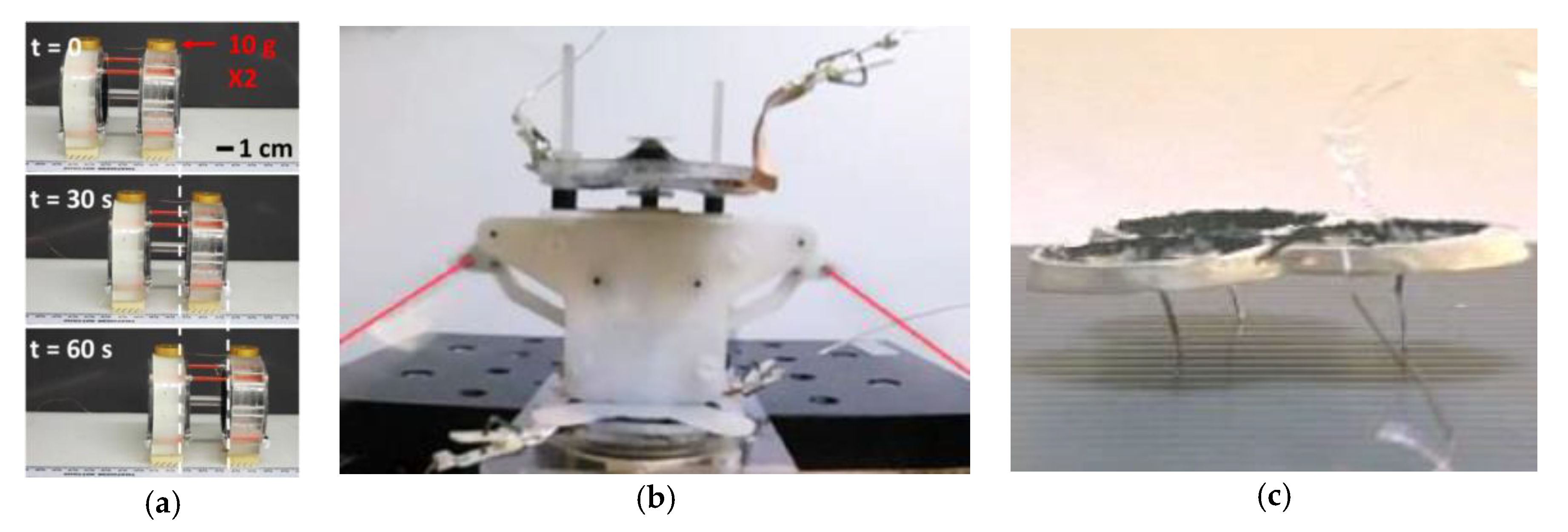
6.2. Worm-Like Crawling Robot
6.3. Flapping Robot
6.4. Jumping Robot
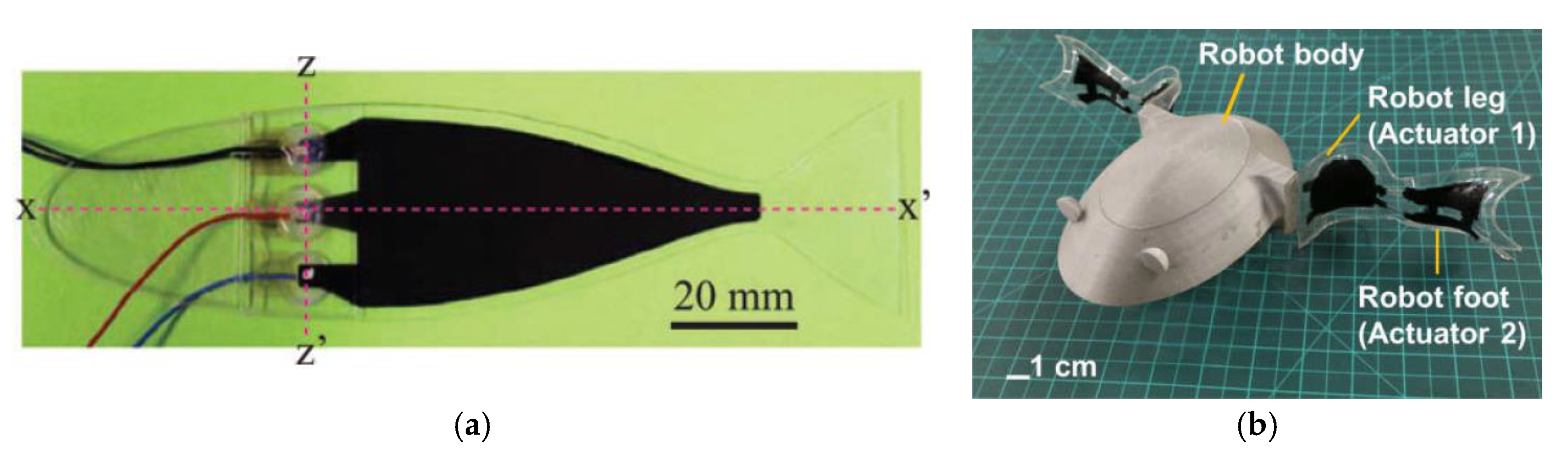
6.5. Swimming Robot
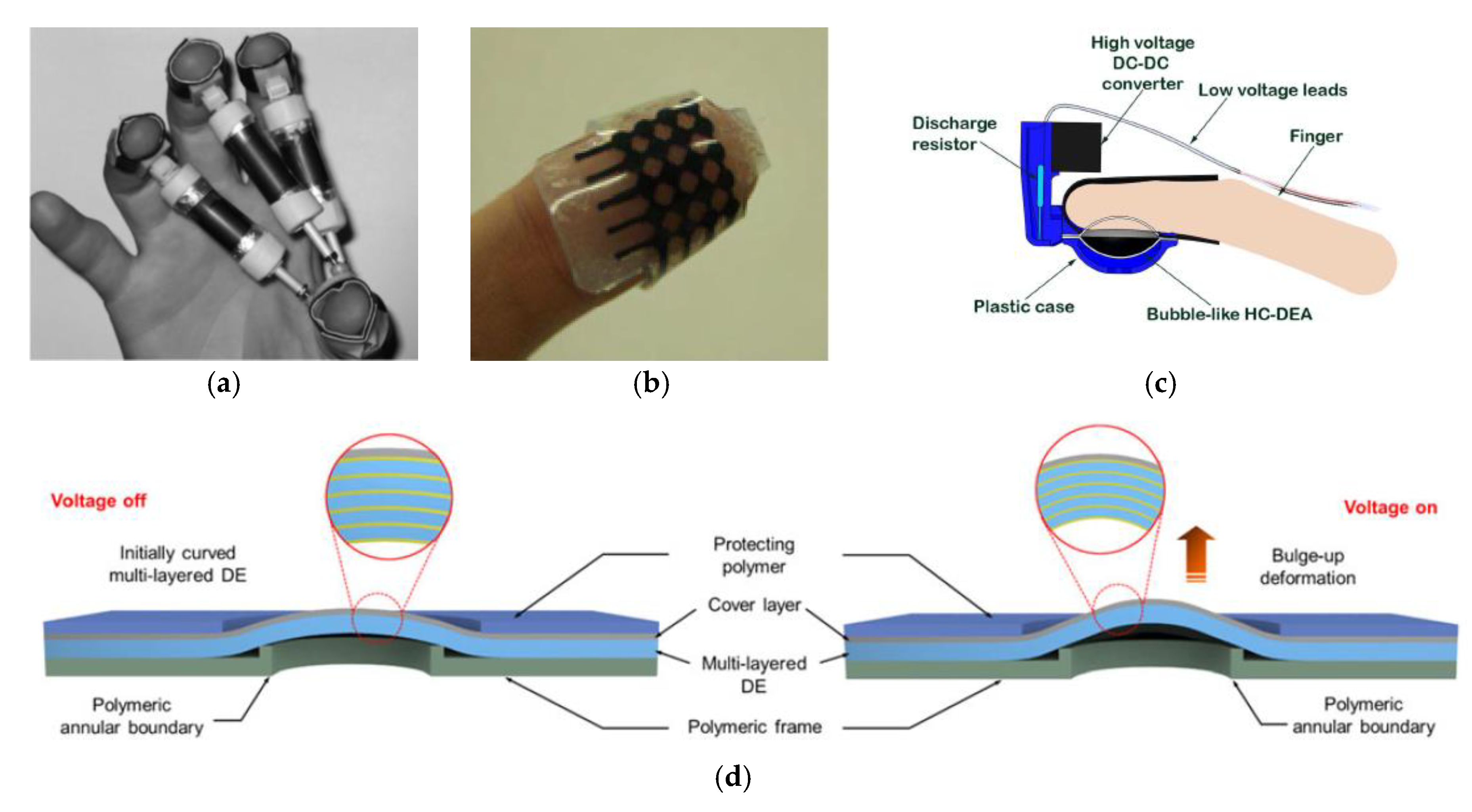
7. Wearable User Interface
8. Optical Application with Tunablility
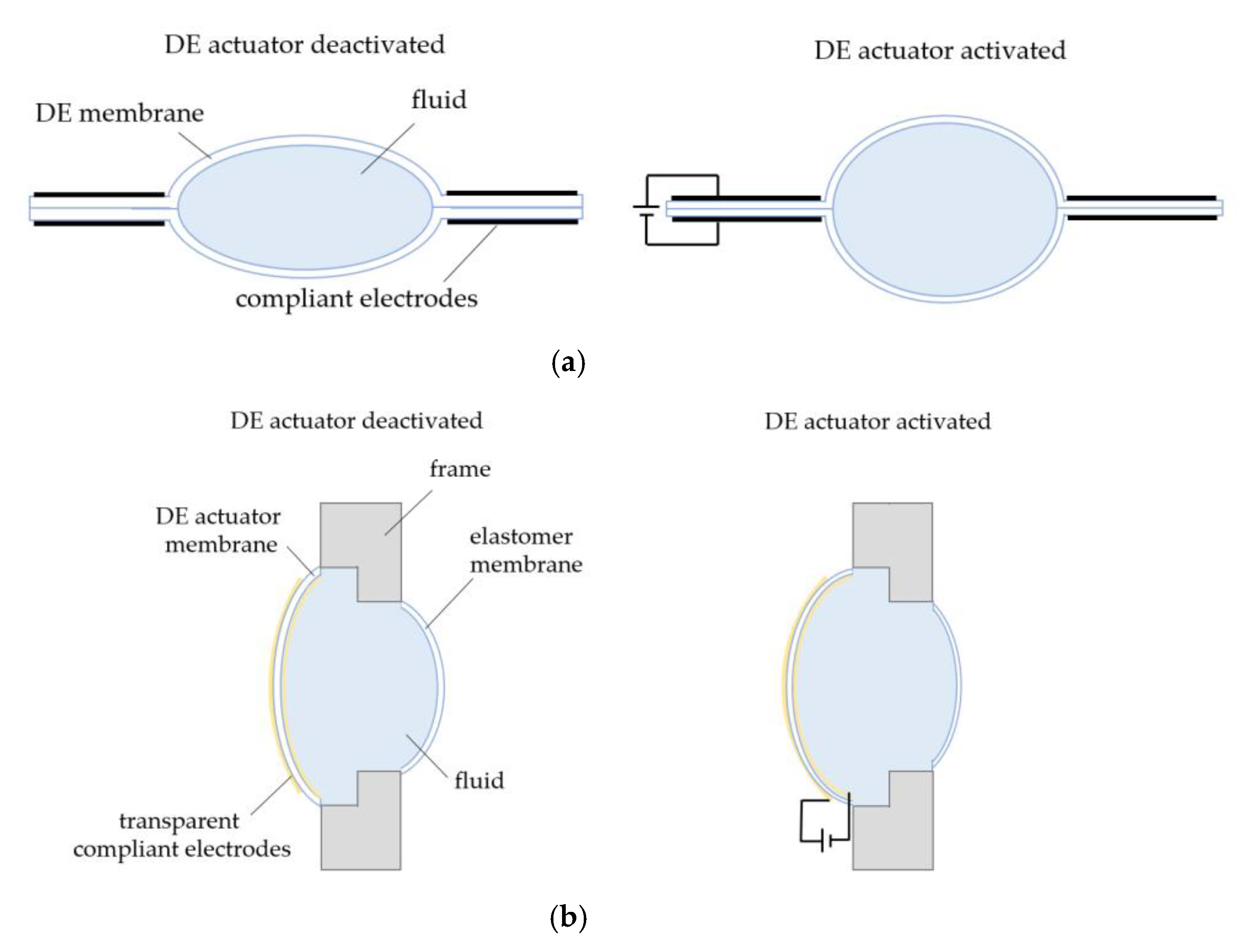
8.1. Fluid-Filled Elastomeric Lens
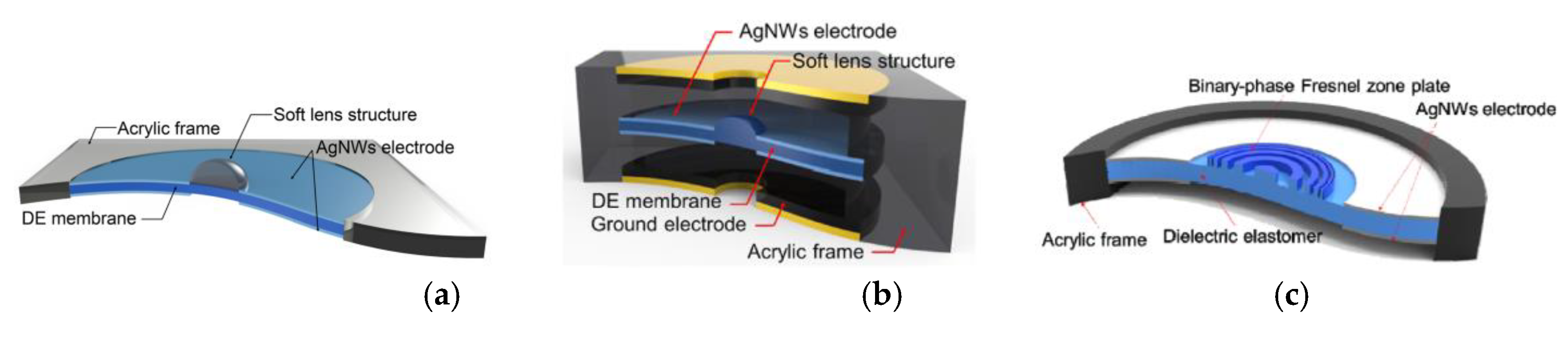
8.2. All-Polymeric Lens
8.3. Liquid Droplet Lens
9. Conclusions and Perspectives
10. Future Challenges for Practical Robotics
Author Contributions
Funding
Conflicts of Interest
References
- Pelrine, R.E.; Kornbluh, R.D.; Joseph, J.P. Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation. Sens. Actuators A 1998, 64, 77–85. [Google Scholar] [CrossRef]
- Kornbluh, R.D.; Pelrine, R.; Pei, Q.; Heydt, R.; Stanford, S.; Oh, S.; Eckerle, J. Electroelastomers: Applications of dielectric elastomer transducers for actuation, generation, and smart structures. In Proceedings of the Smart Structures and Materials 2002: Industrial and Commercial Applications of Smart Structures Technologies, San Diego, CA, USA, 9 July 2002; pp. 245–270. [Google Scholar]
- Borchu, P.; Pei, Q. Advances in Dielectric Elastomers for Actuators and Artificial Muscles. Macromol. Rapid Commun. 2010, 31, 10–36. [Google Scholar] [CrossRef]
- Godaba, H.; Foo, C.C.; Zhang, Z.Q.; Khoo, B.C.; Zhu, J. Giant voltage-induced deformation of a dielectric elastomer under a constant pressure. Appl. Phys. Lett. 2014, 105, 112901. [Google Scholar] [CrossRef]
- Michel, S.; Zhang, X.Q.; Wissler, M.; Löwe, C.; Kovacs, G. A comparison between silicone and acrylic elastomers as dielectric materials in electroactive polymer actuators. Polym. Int. 2009, 59, 391–399. [Google Scholar] [CrossRef]
- Plante, J.; Dubowsky, S. Large-scale failure modes of dielectric elastomer actuators. Int. J. Solids Struct. 2006, 43, 7727–7751. [Google Scholar] [CrossRef]
- Kornbluh, R. Fundamental Configurations for Dielectric Elastomer Actuators. In Dielectric Elastomers as Electromechanical Transducers: Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology, 1st ed.; Carpi, F., De Rossi, D., Kornbluh, R., Pelrine, R., Sommer-Larsen, P., Eds.; Elsevier: Oxford, UK, 2008; pp. 79–90. [Google Scholar]
- Pelrine, R.; Kornbluh, R.D.; Pei, Q.; Stanford, S.; Oh, S.; Eckerle, J.; Full, R.J.; Rosenthal, M.A.; Meijer, K. Dielectric elastomer artificial muscle actuators: Toward biomimetic motion. In Proceedings of the Smart Structures and Materials 2002: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 11 July 2002; pp. 126–137. [Google Scholar]
- Gu, G.; Zhu, J.; Zhu, L.; Zhu, X. A survey on dielectric elastomer actuators for soft robots. Bioinspir. Biomim. 2017, 12, 011003. [Google Scholar] [CrossRef] [PubMed]
- Carpi, F.; Frediani, G.; Turco, S.; De Rossi, D. Bioinspired tunable lens with muscle-like electroactive elastomers. Adv. Funct. Mater. 2011, 21, 4152–4158. [Google Scholar] [CrossRef]
- Laura, J.R.; Miguel, A.L.-M.; Raquel, V. Increasing the performance of dielectric elastomer actuators: A review from the mateirals perspective. Prog. Polym. Sci. 2015, 51, 188–211. [Google Scholar]
- Chen, Y.; Agostini, L.; Moretti, G.; Fontana, M.; Vertechy, R. Dielectric elastomer materials for large-strain actuation and energy harvesting: A comparison between styrenic rubber, natural rubber and acrylic elastomer. Smart Mater. Struct. 2019, 28, 114001. [Google Scholar] [CrossRef]
- Madden, J.D.W.; Vandesteeg, N.A.; Anquetil, P.A.; Madden, P.G.A.; Takshi, A.; Pytel, R.Z.; Lafontaine, S.R.; Wieringa, P.A.; Hunter, I.W. Artificial muscle technology: Physical principles and naval prospects. IEEE J. Oceanic Eng. 2004, 29, 706–728. [Google Scholar] [CrossRef]
- Kornbluh, R.D.; Pelrine, R.; Pei, Q.; Oh, S.; Joseph, J. Ultrahigh strain response of field-actuated elastomer polymers. In Proceedings of the Smart Structures and Materials 2000: Electroactive Polymer Actuators and Devices (EAPAD), Newport Beach, CA, USA, 7 June 2000; p. 387763. [Google Scholar]
- Mirfakhrai, T.; Madden, J.D.W.; Baughman, R.H. Polymer artificial muscles. Mater. Today 2007, 10, 30–38. [Google Scholar] [CrossRef]
- Tan, M.W.M.; Thangavel, G.; Lee, P.S. Enhancing dynamic actuation performance of dielectric elastomer actuators by tuning viscoelastic effects with polar crosslinking. NPG Asia Mater. 2019, 11, 1–10. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.; Joseph, J.; Heydt, R.; Pei, Q.; Chiba, S. High-field deformation of elastomeric dielectrics for actuators. Mater. Sci. Eng. C 2000, 11, 89–100. [Google Scholar] [CrossRef]
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Jeong, J.; Yasir, I.B.; Han, J.; Park, C.H.; Bok, S.K.; Kyung, K.U. Design of Shape Memory Alloy-Based Soft Wearable Robot for Assisting Writ Motion. Appl. Sci. 2019, 9, 4025. [Google Scholar] [CrossRef]
- Park, C.H.; Choi, K.J.; Son, Y.S. Shape Memory Alloy-Based Spring Bundle Actuator Controlled by Water Temperature. IEEE/ASME Trans. Mechatron. 2019, 24, 1798–1807. [Google Scholar] [CrossRef]
- Li, Y.; Guo, M.; Li, Y. Recent advances in plasticized PVC gels for soft actuators and devices: A review. J. Mater. Chem. C 2019, 7, 12991–13009. [Google Scholar] [CrossRef]
- Aziz, S.; Spinks, G.M. Torsional artificial muscles. Mater. Horiz. 2020. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.; Pei, Q.; Joseph, J. High-Speed Electrically Actuated Elastomers with Strain Greater Than 100%. Science 2000, 287, 836–839. [Google Scholar] [CrossRef]
- Carpi, F.; Chiarelli, P.; Mazzoldi, A.; Rossi, D.D. Electromechanical characterization of dielectric elastomer planar actuators: Comparative evaluation of different electrode materials and different counterloads. Sens. Actuators A 2003, 107, 85–95. [Google Scholar] [CrossRef]
- Cho, D.Y.; Eun, K.; Choa, S.H.; Kim, H.K. Highly flexible and stretchable carbon nanotube network electrodes prepared by simple brush painting for cost-effective flexible organic solar cells. Carbon 2014, 8, 530–538. [Google Scholar] [CrossRef]
- Liang, J.; Li, L.; Tong, K.; Ren, Z.; Hu, W.; Niu, X.; Chen, Y.; Pei, Q. Silver Nanowire Percolation Network Soldered with Graphene Oxide at Room Temperature and Its Application for Fully Stretchable Polymer Light-Emitting Diodes. ACS Nano 2014, 8, 1590–1600. [Google Scholar] [CrossRef] [PubMed]
- Keplinger, C.; Sun, J.-Y.; Foo, K.C.C.; Rothemund, P.; Whitesides, G.M.; Suo, Z. Stretchable, Transparent, ionic Conductors. Science 2013, 341, 984–987. [Google Scholar] [CrossRef] [PubMed]
- Tran, D.Q.; Li, J.; Xuan, F.; Xiao, T. Viscoelastic effects on the actuation performance of a dielectric elastomer actuator under different equal, un-equal biaxial pre-stretches. Mater. Res. Express 2018, 5, 065303. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R. Electromechanical Transduction Effects in Dielectric Elastomers: Actuation, Sensing, Stiffness Modulation and Electric Energy Generation. In Dielectric Elastomers as Electromechanical Transducers: Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology, 1st ed.; Carpi, F., De Rossi, D., Kornbluh, R., Pelrine, R., Sommer-Larsen, P., Eds.; Elsevier: Oxford, UK, 2008; pp. 3–12. [Google Scholar]
- Zhao, X.; Koh, S.J.; Suo, Z. Nonequilibrium Thermodynamics of Dielectric Elastomers. Int. J. Appl. Mech. 2011, 3, 203–217. [Google Scholar] [CrossRef]
- Suo, Z. Theory of Dielectric Elastomers. Acta Mech. Solida Sin. 2010, 23, 449–578. [Google Scholar] [CrossRef]
- Hong, W. Modeling viscoelastic dielectrics. J. Mech. Phys. Solids 2011, 59, 637–650. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, H.; Sheng, J.; Liu, L.; Wang, Y.; Jia, S. Dynamic performance of dissipative dielectric elastomers under alternating mechanical load. Appl. Phys. A 2014, 116, 59–67. [Google Scholar] [CrossRef]
- Zhang, H.; Dai, M.; Zhang, Z. Application of viscoelasticity to nonlinear analyses of circular and spherical dielectric elastomers. AIP Adv. 2019, 9, 045010. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, H.; Tang, L.; Li, B.; Sheng, J.; Liu, L. Modeling of spring roll actuators based on viscoelastic dielectric elastomers. Appl. Phys. A 2015, 119, 825–835. [Google Scholar] [CrossRef]
- Wang, H.; Li, L.; Zhu, Y.; Yang, W. Analysis and application of a rolled dielectric elastomer actuator with two degrees of freedom. Smart Mater. Struct. 2016, 25, 125008. [Google Scholar] [CrossRef]
- Wissler, M.; Mazza, E. Modeling and simulation of dielectric elastomer actuators. Smart Mater. Struct. 2005, 14, 1396. [Google Scholar] [CrossRef]
- Wissler, M.; Mazza, E. Mechanical behavior of an acrylic elastomer used in dielectric elastomer actuators. Sens. Actuators A 2007, 134, 494–504. [Google Scholar] [CrossRef]
- Li, B.; Chen, H.; Qiang, J.; Hu, S.; Zhu, Z.; Wang, Y. Effect of mechanical pre-stretch on the stabilization of dielectric elastomer actuation. J. Phys. D Appl. Phys. 2011, 44, 155301. [Google Scholar] [CrossRef]
- Foo, C.C.; Cai, S.; Koh, S.J.; Bauer, S.; Suo, Z. Model of dissipative dielectric elastomers. J. Appl. Phys. 2012, 111, 034102. [Google Scholar]
- Zhang, J.; Wang, Y.; McCoul, D.; Pei, Q.; Chen, H. Viscoelastic creep elimination in dielectric elastomer actuation by preprogrammed voltage. Appl. Phys. Lett. 2014, 105, 212904. [Google Scholar] [CrossRef]
- Jung, M.Y.; Chuc, N.H.; Kim, J.W.; Koo, I.M.; Jung, K.M.; Lee, Y.K.; Nam, J.D.; Choi, H.R.; Koo, J.C. Fabrication and characterization of linear motion dielectric elastomer actuators. In Proceedings of the Smart Structures and Materials 2006: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 22 March 2006; p. 616824. [Google Scholar]
- Zhang, R.; Lochmatter, P.; Kunz, A.; Kovacs, G. Spring roll dielectric elastomer actuators for a portable force feedback glove. In Proceedings of the Smart Structures and Materials 2006: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 22 March 2006; p. 61681T. [Google Scholar]
- Kovacs, G.; Lochmatter, P.; Wissler, M. An arm wrestling robot driven by dielectric elastomer actuators. Smart Mater. Struct. 2007, 16, S306–S317. [Google Scholar] [CrossRef]
- Moscardo, M.; Zhao, X.; Suo, Z.; Lapusta, Y. On designing dielectric elastomer actuators. J. Appl. Phys. 2008, 104, 093503. [Google Scholar] [CrossRef]
- Rajamani, A.; Grissom, M.; Rahn, C.; Zhang, Q. Wound Roll Dielectric Elastomer Actuators: Fabrication, Analysis, and Experiments. IEEE-ASME Trans. Mech. 2008, 13, 117–124. [Google Scholar] [CrossRef]
- Gu, G.; Gupta, U.; Zhu, J.; Zhu, L.; Zhu, X. Modeling of Viscoelastic Electromechanical Behavior in a Soft Dielectric Elastomer Actuator. IEEE Trans. Robot. 2017, 33, 1263–1271. [Google Scholar] [CrossRef]
- Zhang, J.; Ru, J.; Chen, H.; Li, D.; Lu, J. Viscoelastic creep and relaxation of dielectric elastomers characterized by a Kelvin-Voigt-Maxwell model. Appl. Phys. Lett. 2017, 110, 044104. [Google Scholar] [CrossRef]
- Zou, J.; Gu, G. Modeling the Viscoelastic Hysteresis of Dielectric Elastomer Actuators with a Modified Rate-Dependent Prandtl-Ishlinskii Model. Polymers 2018, 10, 525. [Google Scholar] [CrossRef]
- Zou, J.; Gu, G. Feedforward Control of the Rate-Dependent Viscoelastic Hysteresis Nonlinearity in Dielectric Elastomer Actuators. IEEE Robot. Autom. Lett. 2019, 4, 2340–2347. [Google Scholar] [CrossRef]
- Zou, J.; Gu, G. High-Precision Tracking Control of a Soft Dielectric Elastomer Actuator with Inverse Viscoelastic Hysteresis Compensation. IEEE/ASME Trans. Mech. 2019, 24, 36–44. [Google Scholar] [CrossRef]
- Rosset, S.; Poulin, A.; Shea, H.; Anderson, I. Taming the viscoelastic creep of dielectric elastomer actuators. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) XXI, Denver, CO, USA, 13 March 2019; p. 1096614. [Google Scholar]
- Wang, H.M. Viscoelastic analysis of a spring-connected dielectric elastomer actuator undergoing large inhomogeneous deformation. Int. J. Mech. Sci. 2018, 136, 17–23. [Google Scholar] [CrossRef]
- Lv, X.; Liu, L.; Leng, J.; Liu, Y.; Cai, S. Delayed electromechanical instability of a viscoelastic dielectric elastomer balloon. Proc. R. Soc. A 2019, 475, 20190316. [Google Scholar] [CrossRef]
- Full, R.J.; Meijer, K. Metrics of natural muscle function. In Electroactive Polymer (EAP) Actuators as Artificial Muscles: Reality, Potential, and Challenges, 2nd ed.; Bar-Cohen, Y., Ed.; SPIE Press: Bellingham, WA, USA, 2001; Chapter 3; pp. 73–89. [Google Scholar]
- Schlaak, H.F.; Jungmann, M.; Matysek, M.; Lotz, P. Novel multilayer electrostatic solid state actuators with elastic dielectric. In Proceedings of the Smart Structures and Materials 2005: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 6 May 2005; pp. 121–133. [Google Scholar]
- Matysek, M.; Lotz, P.; Flittner, K.; Schlaak, H.F. High-precision characterization of dielectric elastomer stack actuators and their material parameters. In Proceedings of the Smart Structures and Materials 2008: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 10 April 2008; p. 692722. [Google Scholar]
- Kovacs, G.; Düring, L.; Michel, S.; Terrasi, G. Stacked dielectric elastomer actuator for tensile force transmission. Sens. Actuators A 2009, 155, 299–307. [Google Scholar] [CrossRef]
- Kovacs, G.; Düring, L. Contractive tension force stack actuator based on soft dielectric EAP. In Proceedings of the Smart Structures and Materials 2009: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 6 April 2009; p. 72870A. [Google Scholar]
- Chuc, N.H.; Park, J.; Thuy, D.V.; Kim, H.S.; Koo, J.; Lee, Y.; Nam, J.; Choi, H.R. Linear artificial muscle actuator based on synthetic elastomer. In Proceedings of the Smart Structures and Materials 2007: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 5 April 2007; p. 65240J. [Google Scholar]
- Chuc, N.H.; Vuong, N.H.L.; Kim, D.S.; Moon, H.P.; Koo, J.C.; Lee, Y.K.; Nam, J.-D.; Choi, H.R. Fabrication and control of rectilinear artificial muscle actuator. IEEE/ASME Trans. Mechatron. 2010, 16, 167–176. [Google Scholar] [CrossRef]
- Nguyen, C.T.; Phung, H.; Nguyen, T.D.; Lee, C.; Kim, U.; Lee, D.; Moon, H.; Koo, J.; Nam, J.; Choi, H.R. A small biomimetic quadruped robot driven by multistacked dielectric elastomer actuators. Smart Mater. Struct. 2014, 23, 065005. [Google Scholar] [CrossRef]
- Duduta, M.; Hajiesmaili, E.; Zhao, H.; Wood, R.J.; Clarke, D.R. Realizing the potential of dielectric elastomer artificial muscles. Proc. Natl. Acad. Sci. USA 2019, 116, 2476–2481. [Google Scholar] [CrossRef]
- Behboodi, A.; Lee, S. Benchmarking of a Commercially Available Stacked Dielectric Elastomer as an Alternative Actuator for Rehabilitation Robotic Exoskeletons. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 499–505. [Google Scholar]
- Carpi, F.; Migliore, A.; Serra, G.; De Rossi, D. Helical dielectric elastomer actuators. Smart Mater. Struct. 2005, 14, 1210. [Google Scholar] [CrossRef]
- Carpi, F.; Migliore, A.; De Rossi, D. A new contractile linear actuator made of dielectric elastomers. In Proceedings of the Smart Structures and Materials 2005: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 6 May 2005; pp. 64–74. [Google Scholar]
- Carpi, F.; De Rossi, D. Contractile dielectric elastomer actuator with folded shape. In Proceedings of the Smart Structures and Materials 2006: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 17 March 2006; p. 61680D. [Google Scholar]
- Carpi, F.; Salaris, C.; De Rossi, D. Folded dielectric elastomer actuators. Smart Mater. Struct. 2007, 16, S300. [Google Scholar] [CrossRef]
- Carpi, F.; De Rossi, D. Contractile folded dielectric elastomer actuators. In Proceedings of the Smart Structures and Materials 2007: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 4 April 2007; p. 65240D. [Google Scholar]
- Jung, H.S.; Yang, S.Y.; Cho, K.H.; Song, M.G.; Nguyen, C.T.; Phung, H.; Kim, U.; Moon, H.; Koo, J.C.; Nam, J.-D. Design and fabrication of twisted monolithic dielectric elastomer actuator. Int. J. Control. Autom. Syst. 2017, 15, 25–35. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, J. Implementation and simulation of a cone dielectric elastomer actuator. In Proceedings of the Optomechatronic Technologies 2008, San Diego, CA, USA, 17 November 2008; p. 726607. [Google Scholar]
- Wang, H.-M.; Zhu, J.-Y.; Ye, K.-B. Simulation, experimental evaluation and performance improvement of a cone dielectric elastomer actuator. J. Zhejiang Univ Sci. A 2009, 10, 1296–1304. [Google Scholar] [CrossRef]
- Hau, S.; Rizzello, G.; Seelecke, S. A novel dielectric elastomer membrane actuator concept for high-force applications. Extrem. Mech. Lett. 2018, 23, 24–28. [Google Scholar] [CrossRef]
- Choi, H.; Jung, K.M.; Kwak, J.W.; Lee, S.W.; Kim, H.; Jeon, J.W.; Do Nam, J. Multiple degree-of-freedom digital soft actuator for robotic applications. In Proceedings of the Smart Structures and Materials 2003: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 28 July 2003; pp. 262–271. [Google Scholar]
- Conn, A.T.; Rossiter, J. Antagonistic dielectric elastomer actuator for biologically-inspired robotics. In Proceedings of the Smart Structures and Materials 2011: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 28 March 2011; p. 79761Z. [Google Scholar]
- Conn, A.T.; Rossiter, J. Towards holonomic electro-elastomer actuators with six degrees of freedom. Smart Mater. Struct. 2012, 21, 035012. [Google Scholar] [CrossRef]
- Kwak, J.W.; Chi, H.J.; Jung, K.M.; Koo, J.C.; Jeon, J.W.; Lee, Y.; Ryew, Y.; Choi, H.R. A face robot actuated with artificial muscle based on dielectric elastomer. J. Mech. Sci. Technol. 2005, 19, 578–588. [Google Scholar] [CrossRef]
- Cao, C.; Gao, X.; Conn, A. A compliantly coupled dielectric elastomer actuator using magnetic repulsion. Appl. Phys. Lett. 2019, 114, 011904. [Google Scholar] [CrossRef]
- Carpi, F.; De Rossi, D. Dielectric elastomer cylindrical actuators: Electromechanical modelling and experimental evaluation. Mater. Sci. Eng. C 2004, 24, 555–562. [Google Scholar] [CrossRef]
- Pei, Q.; Rosenthal, M.; Stanford, S.; Prahlad, H.; Pelrine, R. Multiple-degrees-of-freedom electroelastomer roll actuators. Smart Mater. Struct. 2004, 13, N86. [Google Scholar] [CrossRef]
- Kovacs, G.M.; Ha, S.M.; Michel, S.; Pelrine, R.; Pei, Q. Study on core free rolled actuator based on soft dielectric EAP. In Proceedings of the Smart Structures and Materials 2008: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 10 April 2008; p. 69270X. [Google Scholar]
- Huang, J.; Lu, T.; Zhu, J.; Clarke, D.R.; Suo, Z. Large, uni-directional actuation in dielectric elastomers achieved by fiber stiffening. Appl. Phys. Lett. 2012, 100, 211901. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, C.; Luo, M.; Chen, X.; Li, D.; Chen, H. A biologically inspired artificial muscle based on fiber-reinforced and electropneumatic dielectric elastomers. Smart Mater. Struct. 2017, 26, 085018. [Google Scholar] [CrossRef]
- Kofod, G.; Wirges, W. Energy minimization for self-organized structure formation and actuation. Appl. Phys. Lett. 2007, 90, 081916. [Google Scholar] [CrossRef]
- Kofod, G.; Paajanen, M.; Bauer, S. Self-organized minimum-energy structures for dielectric elastomer actuators. Appl. Phys. A 2006, 85, 141–143. [Google Scholar] [CrossRef]
- Araromi, O.A.; Gavrilovich, I.; Shintake, J.; Rosset, S.; Richard, M.; Gass, V.; Shea, H.R. Rollable Multisegment Dielectric Elastomer Minimum Energy Structures for a Deployable Microsatellite Gripper. IEEE/ASME Trans. Mechatron. 2015, 20, 438–446. [Google Scholar] [CrossRef]
- Araromi, O.A.; Gavrilovich, I.; Shintake, J.; Rosset, S.; Shea, H.R. Towards a deployable satellite gripper based on multisegment dielectric elastomer minimum energy structures. In Proceedings of the Smart Structures and Materials 2014: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 8 March 2014; p. 90562G. [Google Scholar]
- Heng, K.; Ahmed, A.S.; Shrestha, M.; Lau, G. Strong dielectric-elastomer grippers with tension arch flexures. In Proceedings of the Smart Structures and Materials 2017: Electroactive Polymer Actuators and Devices (EAPAD), Portland, OR, USA, 17 April 2017; p. 101631Z. [Google Scholar]
- Lau, G.; Heng, K.; Ahmed, A.S.; Shrestha, M. Dielectric elastomer fingers for versatile grasping and nimble pinching. Appl. Phys. Lett. 2017, 110, 182906. [Google Scholar] [CrossRef]
- Zhou, F.; Zhang, M.; Cao, X.; Zhang, Z.; Chen, X.; Xizo, Y.; Liang, Y.; Wong, T.; Li, T.; Xu, Z. Fabrication and modeling of dielectric elastomer soft actuator with 3D printed thermoplastic frame. Sens. Actuators A 2019, 292, 112–120. [Google Scholar] [CrossRef]
- Shintake, J.; Schubert, B.; Rosset, S.; Shea, H.; Floreano, D. Variable Stiffness Actuator for Soft Robotics Using Dielectric Elastomer and Low-Melting-Point Alloy. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1097–1102. [Google Scholar]
- McCoul, D.; Rosset, S.; Besse, N.; Shea, H. Multifunctional shape memory electrodes for dielectric elastomer actuators enabling high holding force and low-voltage multisegment addressing. Smart Mater. Struct. 2016, 26, 025015. [Google Scholar] [CrossRef]
- Imamura, H.; Kadooka, K.; Taya, M. A variable stiffness dielectric elastomer actuator based on electrostatic chucking. Soft Matter. 2017, 13, 3440–3448. [Google Scholar] [CrossRef]
- Shintake, J.; Rosset, S.; Schubert, B.; Floreano, D.; Shea, H. Versatile Soft Grippers with Intrinsic Electroadhesion Based on Multifunctional Polymer Actuators. Adv. Mater. 2016, 28, 231–238. [Google Scholar] [CrossRef]
- Cacucciolo, V.; Shintake, J.; Shea, H. Delicate yet strong: Characterizing the electro-adhesion lifting force with a soft gripper. In Proceedings of the IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 108–113. [Google Scholar]
- Shian, S.; Bertoldi, K.; Clarke, D.R. Dielectric Elastomer Based “Grippers” for Soft Robotics. Adv. Mater. 2015, 27, 6814–6819. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Liu, L.; Liu, Y.; Leng, J. Dielectric Elastomer Spring-Roll Bending Actuators: Application in Soft Robotics and Design. Soft Rob. 2019, 6, 69–81. [Google Scholar] [CrossRef] [PubMed]
- Pourazadi, S.; Bui, H.; Menon, C. Investigation on a soft grasping gripper based on dielectric elastomer actuators. Smart Mater. Struct. 2019, 28, 035009. [Google Scholar] [CrossRef]
- Eckerle, O.; Stanford, S.; Marlow, J.; Schmidt, R.; Oh, S.; Low, T.; Shastri, S.V. Biologically inspired hexapedal robot using field-effect electroactive elastomer artificial muscles. In Proceedings of the SPIE 4332, Smart Structures and Materials 2001: Industrial and Commercial Applications of Smart Structures Technologies, Newport Beach, CA, USA, 14 June 2001. [Google Scholar]
- Pei, Q.; Pelrine, R.; Stanford, S.; Kornbluh, R.D.; Rosenthal, M.S.; Meijer, K.; Full, R.J. Multifunctional electroelastomer rolls and their application for biomimetic walking robots. In Proceedings of the SPIE 4698, Smart Structures and Materials 2002: Industrial and Commercial Applications of Smart Structures Technologies, San Diego, CA, USA, 9 July 2002. [Google Scholar]
- Nguyen, C.T.; Phung, H.; Jung, H.; Kim, U.; Nguyen, T.D.; Park, J.; Moon, H.; Koo, J.C.; Choi, H.R. Printable Monolithic Hexapod Robot Driven by Soft Actuator. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Nguyen, C.T.; Phung, H.; Hoang, P.T.; Nguyen, T.D.; Jung, H.; Moon, H.; Koo, J.C.; Choi, H.R. A novel bioinspired hexapod robot developed by soft dielectric elastomer actuators. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Jung, K.; Koo, J.C.; Nam, J.; Lee, Y.K.; Choi, H.R. Artificial annelid robot driven by soft actuators. Bioinspiration Biomim. 2007, 2, S42. [Google Scholar] [CrossRef] [PubMed]
- Shian, S.; Bertoldi, K.; Clarke, D.R. Use of aligned fibers to enhance the performance of dielectric elastomer inchworm robots. In Proceedings of the SPIE 9430, Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 1 April 2015. [Google Scholar]
- Cao, J.; Qin, L.; Liu, J.; Ren, Q.; Foo, C.C.; Wang, H.; Lee, H.P.; Zhu, J. Untethered soft robot capable of stable locomotion using soft electrostatic actuators. Extrem. Mech. Lett. 2018, 21, 9–16. [Google Scholar] [CrossRef]
- Cao, C.; Diteesawat, R.S.; Rossiter, J.; Conn, A.T. A Reconfigurable Crawling Robot Driven by Electroactive Artificial Muscle. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019. [Google Scholar]
- Lau, G.; Chin, Y.; La, T. Development of elastomeric flight muscles for flapping wing micro air vehicles. In Proceedings of the SPIE 10163, Electroactive Polymer Actuators and Devices (EAPAD), Portland, OR, USA, 17 April 2017. [Google Scholar]
- Cao, C.; Burgess, S.; Conn, A.T. Toward a Dielectric Elastomer Resonator Driven Flapping Wing Micro Air Vehicle. Front. Robot. AI 2019, 5, 137. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, H.; Mao, J.; Chirarattananon, P.; Helbling, E.F.; Hyun, N.P.; Clarke, D.R.; Wood, R.J. Controlled flight of a microrobot powered by soft artificial muscles. Nature 2019, 575, 324–329. [Google Scholar] [CrossRef]
- Pei, Q.; Pelrine, R.; Rosenthal, M.A.; Stanford, S.; Prahlad, H.; Kornbluh, R.D. Recent progress on electroelastomer artificial muscles and their application for biomimetic robots. In Proceedings of the Volume 5385, Smart Structures and Materials 2004: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 27 July 2004. [Google Scholar]
- Dubowsky, S.; Kesner, S.; Plante, J.; Boston, P. Hopping mobility concept for search and rescue robots. Ind. Robot. 2008, 35, 238–245. [Google Scholar] [CrossRef]
- Dubuta, M.; Berlinger, F.C.J.; Nagpal, R.; Clarke, D.R.; Wood, R.J.; Temel, F.Z. Electrically-latched compliant jumping mechanism based on a dielectric elastomer actuator. Smart Mater. Struct. 2019, 28, 09LT01. [Google Scholar]
- Godaba, H.; Li, J.; Wang, Y.; Zhu, J. A Soft Jellyfish Robot Driven by a Dielectric Elastomer Actuator. IEEE Robot. Autom. Lett. 2016, 1, 624–631. [Google Scholar] [CrossRef]
- Shintake, J.; Shea, H.; Floreano, D. Biomimetic Underwater Robots Based on Dielectric Elastomer Actuators. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016. [Google Scholar]
- Shintake, J.; Cacucciolo, V.; Shea, H.; Floreano, D. Soft Biomimetic Fish Robot Made of Dielectric Elastomer Actuators. Soft Robot. 2018, 5, 452–465. [Google Scholar] [CrossRef] [PubMed]
- Berlinger, F.; Dubuta, M.; Gloria, H.; Clarke, D.; Nagpal, R.; Wood, R. A Modular Dielectric Elastomer Actuator to Drive Miniature Autonomous Underwater Vehicles. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018. [Google Scholar]
- Tang, Y.; Qin, L.; Li, X.; Chew, C.; Zhu, J. A Frog-inspired Swimming Robot Based on Dielectric Elastomer Actuators. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Pacchierotti, C.; Sinclair, S.; Solazzi, M.; Frisoli, A.; Hayward, V.; Prattichizzo, D. Wearable Haptic Systems for the Fingertip and the Hand: Taxonomy, Review, and Perspectives. IEEE Trans. Haptics 2017, 10, 580–600. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Kunz, A.; Gabor, K.; Silvain, M.; Mazzon, A. Dielectric Elastomer Actuators for a Portable Force Feedback Device. In Proceedings of the Eurohaptics 04, Muenchen, Germany, 5–7 June 2004; pp. 300–307. [Google Scholar]
- Zhang, R.; Kunz, A.; Lochmatter, P.; Kovacs, G. Dielectric Elastomer Spring Roll Actuators for a Portable Force Feedback Device. In Proceedings of the 2006 14th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Arlington, VA, USA, 25–26 March 2006; pp. 347–353. [Google Scholar]
- Koo, I.K.; Jung, K.; Koo, J.; Nam, J.; Lee, Y.; Choi, H.R. Wearable Fingertip Tactile Display. In Proceedings of the SICE-ICASE International Joint Conference 2006, Busan, Korea, 18–21 October 2006; pp. 1911–1916. [Google Scholar]
- Bolzmacher, C.; Biggs, J.; Srinivasan, M. Flexible dielectric elastomer actuators for wearable human-machine interfaces. In Proceedings of the SPIE Smart Structures + Nondestructive Evaluation 2006, San Diego, CA, USA, 16 March 2006. [Google Scholar]
- Carpi, F.; Frediani, G.; De Rossi, D. Hydrostatically Coupled Dielectric Elastomer Actuators. IEEE-ASME Trans. Mech. 2010, 15, 308–315. [Google Scholar] [CrossRef]
- Frediani, G.; Mazzei, D.; De Rossi, D.E.; Carpi, F. Wearable wireless tactile display for virtual interactions with soft bodies. Front. Bioeng. Biotechnol. 2014, 2, 00031. [Google Scholar] [CrossRef] [PubMed]
- Boys, H.; Frediani, G.; Poslad, S.; Busfield, J.; Carpi, F. A dielectric elastomer actuator-based tactile display for multiple fingertip interaction with virtual soft bodies. In Proceedings of the SPIE Smart Structures + Nondestructive Evaluation 2017, Portland, OR, USA, 17 April 2017. [Google Scholar]
- Mun, S.; Yun, S.; Nam, S.; Park, S.K.; Park, S.; Park, B.J.; Lim, J.M.; Kyung, K.U. Electro-Active Polymer Based Soft Tactile Interface for Wearable Devices. IEEE Trans. Haptics 2018, 11, 15–21. [Google Scholar] [CrossRef]
- Yun, S.; Park, S.; Park, B.; Ryu, S.; Jeong, S.M.; Kyung, K.U. A soft and transparent visuo-haptic interface pursuing wearable devices. IEEE Trans. Ind. Electron. 2020, 67, 717–724. [Google Scholar] [CrossRef]
- Pourazadi, S.; Ahmadi, S.; Menon, C. Towards the development of active compression bandages using dielectric elastomer actuators. Smart Mater. Struct. 2014, 23, 065007. [Google Scholar] [CrossRef]
- Kelly, C.R.; Kauffman, J.L. Exploring dielectric elastomers as actuators for hand tremor suppression. In Proceedings of the Smart Structures and Materials 2017: Electroactive Polymer Actuators and Devices (EAPAD), Portland, OR, USA, 17 April 2017. [Google Scholar]
- Kelly, C.R.; Kauffman, J.L. Tremor suppression controller for dielectric elastomer orthosis. In Proceedings of the Smart Structures and Materials 2018: Electroactive Polymer Actuators and Devices (EAPAD), Denver, CO, USA, 27 March 2018. [Google Scholar]
- Kelly, C.R.; Kauffman, J.L. Necessary dielectric elastomer parameters for wearable tremor suppression. In Proceedings of the Smart Structures and Materials 2019: Electroactive Polymer Actuators and Devices (EAPAD), Denver, CO, USA, 13 March 2019. [Google Scholar]
- Guo, J.; Xiang, C.; Helps, T.; Rossiter, J. Electroactive textile actuators for wearable and soft robots. In Proceedings of the Robosoft 2018, Livorno, Italy, 24–28 April 2018. [Google Scholar]
- Shian, S.; Diebold, R.M.; Clarke, D.R. Tunable lenses using transparent dielectric elastomer actuators. Opt. Express 2013, 21, 8669–8676. [Google Scholar] [CrossRef]
- Wei, K.; Zhao, Y. Electroactive liquid lens driven by an annular membrane. Opt. Lett. 2014, 39, 1318–1321. [Google Scholar] [CrossRef]
- Keong, G.K.; La, T.G.; Shiau, L.L.; Tan, A.W.Y. Challenges of using dielectric elastomer actuators to tune liquid lens. In Proceedings of the Smart Structures and Materials 2014: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 8 March 2014. [Google Scholar]
- Rasti, P.; Hous, H.; Schlaak, H.F.; Kiefer, R.; Anbarjafari, G. Dielectric elastomer stack actuator-based autofocus fluid lens. Appl. Opt. 2015, 54, 9976–9980. [Google Scholar] [CrossRef]
- Yun, S.; Park, S.; Park, B.; Nam, S.; Park, S.K.; Kyung, K.U. A thin film active-lens with translational control for dynamically programmable optical zoom. Appl. Phys. Lett. 2015, 107, 081907. [Google Scholar] [CrossRef]
- Yun, S.; Park, S.; Nam, S.; Park, B.; Park, S.K.; Mun, S.; Lim, J.M.; Kyung, K.U. An electro-active polymer based lens module for dynamically varying focal system. Appl. Phys. Lett. 2016, 109, 141908. [Google Scholar] [CrossRef]
- Nam, S.; Yun, S.; Yoon, J.W.; Park, S.; Park, S.K.; Mun, S.; Park, B.; Kyung, K.U. A Robust Soft Lens for Tunable Camera Application Using Dielectric Elastomer Actuators. Soft. Robot. 2018, 5, 777–782. [Google Scholar] [CrossRef] [PubMed]
- Park, S.; Park, B.; Nam, S.; Yun, S.; Park, S.K.; Mun, S.; Lim, J.M.; Ryu, Y.; Song, S.H.; Kyung, K.U. Electrically tunable binary phase Fresnel lens based on a dielectric elastomer actuator. Opt. Express 2017, 25, 23801–23808. [Google Scholar] [CrossRef] [PubMed]
- Jin, B.; Lee, J.-H.; Zhou, Z.; Zhang, G.; Lee, G.-B.; Ren, H.; Nah, C. Adaptive liquid lens driven by elastomer actuator. Opt. Eng. 2016, 55, 017107. [Google Scholar] [CrossRef]
- Poulin, A.; Demir, C.S.; Rosset, S.; Petrova, T.V.; Shea, H. Dielectric elastomer actuator for mechanical loading of 2D cell cultures. Lab Chip 2016, 16, 3788–3794. [Google Scholar] [CrossRef] [PubMed]
- Ghazali, F.A.M.; Mah, C.K.; AbuZaiter, A.; Chee, P.S.; Ali, M.S.M. Soft dielectric elastomer actuator micropump. Sens. Actuators A 2017, 263, 276–284. [Google Scholar] [CrossRef]
- Sarban, R.; Jones, R.W.; Mace, B.R.; Rustighi, E. A tubular dielectric elastomer actuator: Fabrication, characterization and active vibration isolation. Mech. Syst. Signal Process. 2011, 25, 2879–2891. [Google Scholar] [CrossRef]
- Heydt, R.; Kornbluh, R.; Eckerle, J.; Pelrine, R. Sound radiation properties of dielectric elastomer electroactive polymer loudspeakers. In Proceedings of the SPIE Smart Structures + Nondestructive Evaluation 2006, San Diego, CA, USA, 22 March 2006. [Google Scholar]
- Hosoya, N.; Baba, S.; Maeda, S. Hemispherical breathing mode speaker using a dielectric elastomer actuator. J. Acoust. Soc. Am. 2015, 138, EL424–El428. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, M.Y. Multi-axis soft sensors based on dielectric elastomer. Soft Robot. 2016, 3, 3–12. [Google Scholar] [CrossRef]
- Jung, K.; Kim, K.J.; Choi, H.R. A self-sensing dielectric elastomer actuator. Sens. Actuators A Phys. 2008, 143, 343–351. [Google Scholar] [CrossRef]
- Schlaak, H.F.; Matysek, M.; Lotz, P. Fabrication and application of miniaturized dielectric elastomer stack actuators. IEEE/ASME Trans. Mechatron. 2010, 16, 58–66. [Google Scholar]
- Clarke, D.R.; Wood, R.J.; Duduta, M. Multilayer dielectric elastomers for fast, programmable actuation without prestretch. Adv. Mater. 2016, 28, 8058–8063. [Google Scholar]
- Shea, H.R.; Rosset, S.; Poulin, A. Printing low-voltage dielectric elastomer actuators. Appl. Phys. Lett. 2015, 107, 244104. [Google Scholar]
- Madsen, F.B.; Yu, L.; Daugaard, A.E.; Hvilsted, S.; Skov, A.L. Silicone elastomers with high dielectric permittivity and high dielectric breakdown strength based on dipolar copolymers. Polymer 2014, 55, 6212–6219. [Google Scholar] [CrossRef]
- Caspari, P.; Dünki, S.J.; Nüesch, F.A.; Opris, D.M. Dielectric elastomer actuators with increased dielectric permittivity and low leakage current capable of suppressing electromechanical instability. J. Mater. Chem. C 2018, 6, 2043–2053. [Google Scholar] [CrossRef]
- Landgraf, M.; Zorell, U.; Wetzel, T.; Reitelshöfer, S.; Yoo, I.S.; Franke, J. Dielectric elastomer actuators as self-sensing devices: A new method of superimposing actuating and sensing signals. In Proceedings of the Smart Structures and Materials 2015: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 1 April 2015; p. 943014. [Google Scholar]
- Lenz, S.; Holz, B.; Hau, S.; Seelecke, S. Development of a high voltage source for dielectric elastomer actuators (DEA). In Proceedings of the ACTUATOR 2018; 16th International Conference on New Actuators, Bremen, Germany, 25 June 2018; pp. 196–199. [Google Scholar]
- Ha, S.M.; Yuan, W.; Pei, Q.; Pelrine, R.; Stanford, S. Interpenetrating Polymer Networks for High-Performance Electroelastomer Artificial Muscles. Adv. Mater. 2006, 18, 887–891. [Google Scholar] [CrossRef]
- Ha, S.M.; Yuan, W.; Pei, Q.; Pelrine, R.; Stanford, S. Interpenetrating networks of elastomers exhibiting 300% electrically-induced area strain. Smart Mater. Struct. 2007, 16, S280–S287. [Google Scholar] [CrossRef]
- La, T.; Lau, G. Very high dielectric strength for dielectric elastomer actuators in liquid dielectric immersion. Appl. Phys. Lett. 2013, 102, 192905. [Google Scholar] [CrossRef]
- Koh, S.J.A.; Li, T.; Zhou, J.; Zhao, X.; Hong, W.; Zhu, J.; Suo, Z. Mechanisms of large actuation strain in dielectric elastomers. J. Polym. Sci. Pol. Phys. 2011, 49, 504–515. [Google Scholar] [CrossRef]
- Gupta, U.; Qin, L.; Wang, Y.; Godaba, H.; Zhu, J. Soft robots based on dielectric elastomer actuators: A review. Smart Mater. Struct. 2019, 28, 103002. [Google Scholar] [CrossRef]
- Zhou, J.; Jiang, L.; Cai, S. Predicting the electrical breakdown strength of elastomers. Extrem. Mech. Lett. 2018, 21, 9–16. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Type | Pre-Strain (x, y) (%) | Maximum Strain (%) | Work Density per Cycle (J/cm3) | Maximum Energy Efficiency |
|---|---|---|---|---|---|
| [13,14,15] | Dielectric elastomer (VHB 4910) | 300, 300 | 158 (Circular area strain) | <3.4 (0.15 typical) | 80 (30 typical) |
| [13,14,15] | Dielectric elastomer (VHB 4910) | 540, 75 | 215 (Linear area strain) | <1.36 | 80 (30 typical) |
| [16,17] | Dielectric elastomer (polyurethane acrylate) | 0, 0 | 66.7 (Circular area strain) | 0.087 | 80 |
| [17] | Dielectric elastomer (Sylgard 186) | 0, 0 | 32 (Circular area strain) | 0.082 | 90 |
| [3,14] | Dielectric elastomer (CF19-2186) | 45, 45 | 64 (Circular area strain) | 0.75 | 79 |
| [14] | Dielectric elastomer (CF19-2186) | 100, 0 | 63 (Linear area strain) | 0.2 | - |
| [14] | Dielectric elastomer (HS3) | 280, 0 | 117 (Linear area strain) | 0.16 | - |
| [3,18] | Shape memory alloy wire (NiTi) | - | 6–8 | 100 | 3~10 |
| [19,20] | Shape memory alloy coil spring (NiTi) | - | 300 | >100 | 3~10 |
| [3] | Shape memory polymer (polyurethane) | - | 100–400 | 2 | 10 |
| [3] | Piezoelectric ceramic (PZT) | - | 0.2 | 0.1 | 90 |
| [3] | Piezoelectric polymer (PVDF) | - | 0.1 | 0.0024 | - |
| [3] | Conductive polymer (PANI) | - | 10 | 23 | <5 |
| [3] | Ionic gel (polyelectrolyte) | - | 40 | 0.06 | 30 |
| [21] | PVC gel actuator | - | 76 | - | - |
| [22] | Coiled actuator (Nylon) | - | 50 | 0.84 | - |
| [15,18] | Natural human muscle | - | 40 | 0.008~0.04 | 35–40 |
| Year, Config. | Electrode | Modeling Method | Material Model | Viscoelastic Model | Static/Dynamic Analysis | Strain Rate | Pre-Stretch | Sim | Exp. 1 |
|---|---|---|---|---|---|---|---|---|---|
| 2005, Circular [37] | Beaten gold | Numerical | Yeoh | Prony series | Static | No | No | Yes | Yes |
| 2006, Circular [5] | Hydrogel | Numerical | Ogden | Rheological model | Static | Yes | Yes | Yes | Yes |
| 2007, Circular [38] | Graphite/Silicone | Numerical | Yeoh, Arruda-Boyce, Ogden | - | Static | No | Yes | Yes | Yes |
| 2011, Circular [39] | Carbon grease | Analytical | Gent, Neo-Hookean | - | Static | No | Yes | Yes | Yes |
| 2012, Circular [40] | - | Analytical | Gent | Rheological model | Both | Yes | Yes | Yes | No |
| 2014, Circular [41] | Carbon grease | Analytical | Gent | Rheological model | Static | Yes | Yes | Yes | Yes |
| 2018, Circular [28] | Carbon grease | Analytical | Gent | Rheological model | Both | Yes | Yes | Yes | Yes |
| 2019, Circular [34] | Carbon grease | Analytical | Gent | Rheological model | Static | Yes | Yes | Yes | No |
| 2006, Spring Roll [42] | - | Analytical | - | - | Static | No | Yes | Yes | Yes |
| 2006, Spring Roll [43] | - | Numerical | - | - | Static | No | Yes | Yes | Yes |
| 2007, Spring Roll [44] | - | Numerical | Yeoh | - | Static | No | Yes | Yes | No |
| 2008, Spring Roll [45] | - | Analytical | Gaussian | - | Static | No | Yes | Yes | No |
| 2008, Spring Roll [46] | Carbon grease | Numerical | - | - | Static | No | Yes | Yes | Yes |
| 2015, Spring Roll [35] | Carbon grease | Analytical | Neo-Hookean | Rheological model | Both | Yes | No | Yes | No |
| 2016, Spring Roll [36] | Carbon grease | Numerical | Yeoh | - | Static | No | No | Yes | Yes |
| Configurations | Nominal Electric Field | Pre-Strain | Material | Size | Load 1 | Strain or Stroke | Ref. |
|---|---|---|---|---|---|---|---|
| Linear Contraction | |||||||
| Multi-stack | 4.2 kV/40 μm | 400% biaxial | VHB 4910 + IPN | 18 × 18 × 18.3 | 20.74 N | −10% | [58] |
| Helical | 14 V/μm | None | TC-5005 | 13 × 13 × 80 | None | −5% | [65] |
| Folded | 12 V/μm | None | TC-5005 | 25 × 25 × 85 | None | −15% | [68] |
| Twisted | 6.5 kV/220 μm | None | Elastosil P7670 + PT88 | 11.5 × 11.5 × 80 | 100g | −5.2% | [70] |
| Linear Expansion | |||||||
| Cone | 90 V/μm | 20% biaxial | Elastosil film | 86 × 86 × 25 | 100 N | +3mm | [73] |
| Tubular | 7.5 kV/160 μm | None | CF 19-2186 | 8 × 8 × 50 | −20 g | +14% | [42] |
| Roll | 21 kV/1000 μm | None | VHB 4910 | 45×45×40 | −547 g | +35.8% | [82] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Youn, J.-H.; Jeong, S.M.; Hwang, G.; Kim, H.; Hyeon, K.; Park, J.; Kyung, K.-U. Dielectric Elastomer Actuator for Soft Robotics Applications and Challenges. Appl. Sci. 2020, 10, 640. https://doi.org/10.3390/app10020640
Youn J-H, Jeong SM, Hwang G, Kim H, Hyeon K, Park J, Kyung K-U. Dielectric Elastomer Actuator for Soft Robotics Applications and Challenges. Applied Sciences. 2020; 10(2):640. https://doi.org/10.3390/app10020640
Chicago/Turabian StyleYoun, Jung-Hwan, Seung Mo Jeong, Geonwoo Hwang, Hyunwoo Kim, Kyujin Hyeon, Jihwan Park, and Ki-Uk Kyung. 2020. "Dielectric Elastomer Actuator for Soft Robotics Applications and Challenges" Applied Sciences 10, no. 2: 640. https://doi.org/10.3390/app10020640
APA StyleYoun, J.-H., Jeong, S. M., Hwang, G., Kim, H., Hyeon, K., Park, J., & Kyung, K.-U. (2020). Dielectric Elastomer Actuator for Soft Robotics Applications and Challenges. Applied Sciences, 10(2), 640. https://doi.org/10.3390/app10020640