Design and Validation of Rule-Based Expert System by Using Kinect V2 for Real-Time Athlete Support


Abstract
1. Introduction
- Simultaneously work (S);
- Determination of movement accuracy (MA);
- Giving feedback for movement correction (F);
- Skeleton extraction (SE);
- Usability in training (UT);
- Usability in rehabilitation (UR);
- Being oriented towards physical ability (PA);
- Being oriented towards cognitive ability (CA);
- To be able to make pose analysis (POA);
- The ability to perform movement model analysis (MMA).
2. Materials and Methods
2.1. Isotonic Movements
2.2. Data Analysis
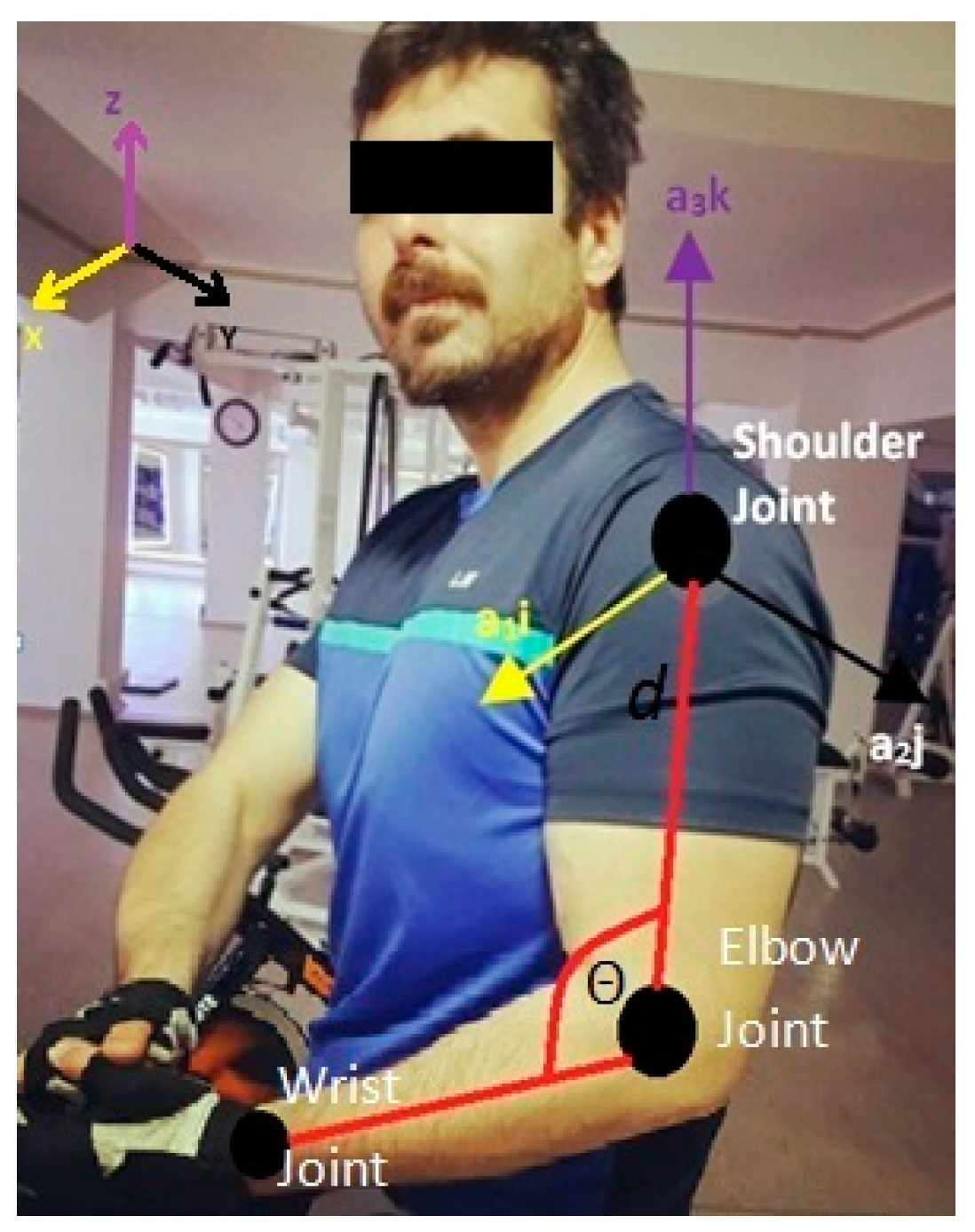
2.3. Angles between Joints and Kinect V2
2.4. Modeling of DSP and LR Movements
- You should be positioned upright when the movement is made by sitting, at a 90° angle (A5) and when the movement is made by standing, at 170–180° angle (Equation ((5)) [63];
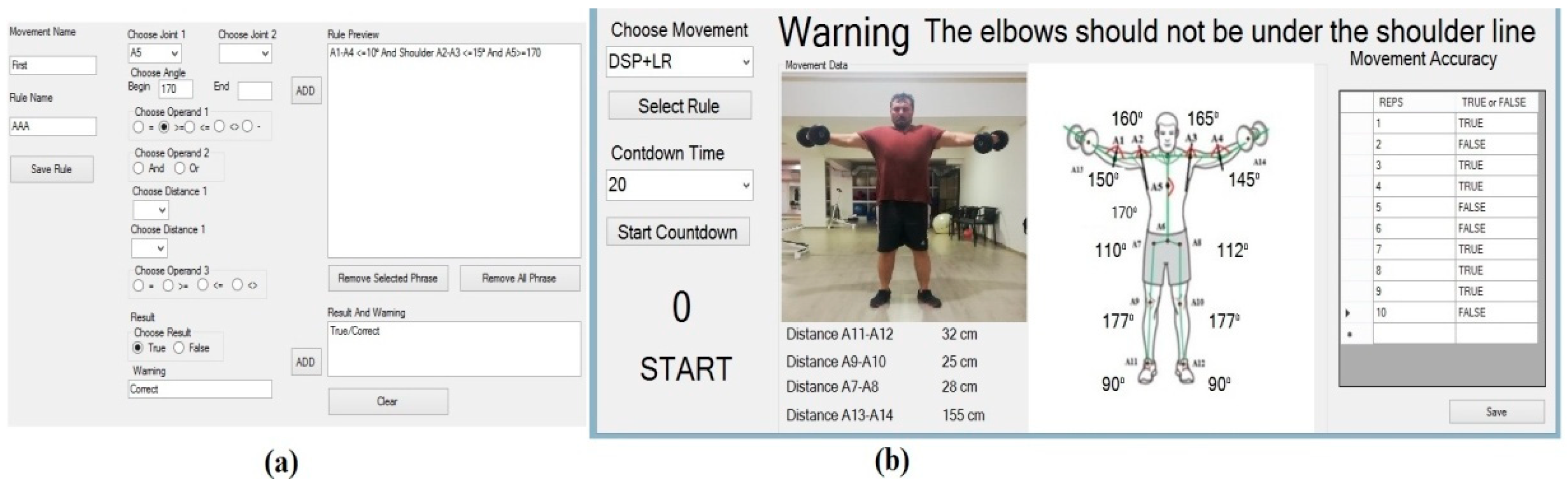
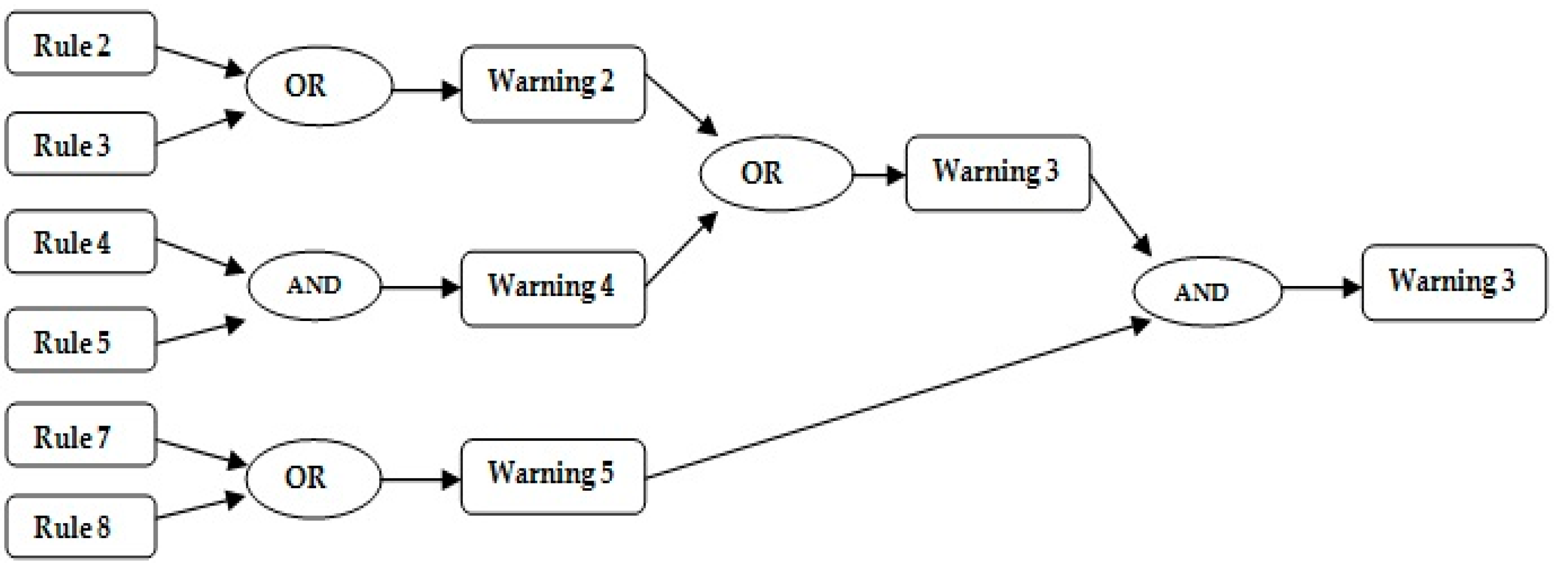
2.5. Rule-Based Expert System Design
If (one or more condition = True) then (outcome/result)
| Algorithm 1: Example algorithm of a sports area |
| Input: Joint Angles J = (Elbow angle1, Elbow angle2, Shoulder angle1, Shoulder angle2, Spine angle) Output: Accuracy of Movement |
| If (Elbow Angle Difference ≤ 10°) and (Shoulder Angle Difference ≤ 15°) and (Spine Angle ≥ 170°) Then “Correct Movement” Else “Wrong Movement” End If |
2.6. System Architecture
2.7. Participants and Setup
3. Results and Discussion
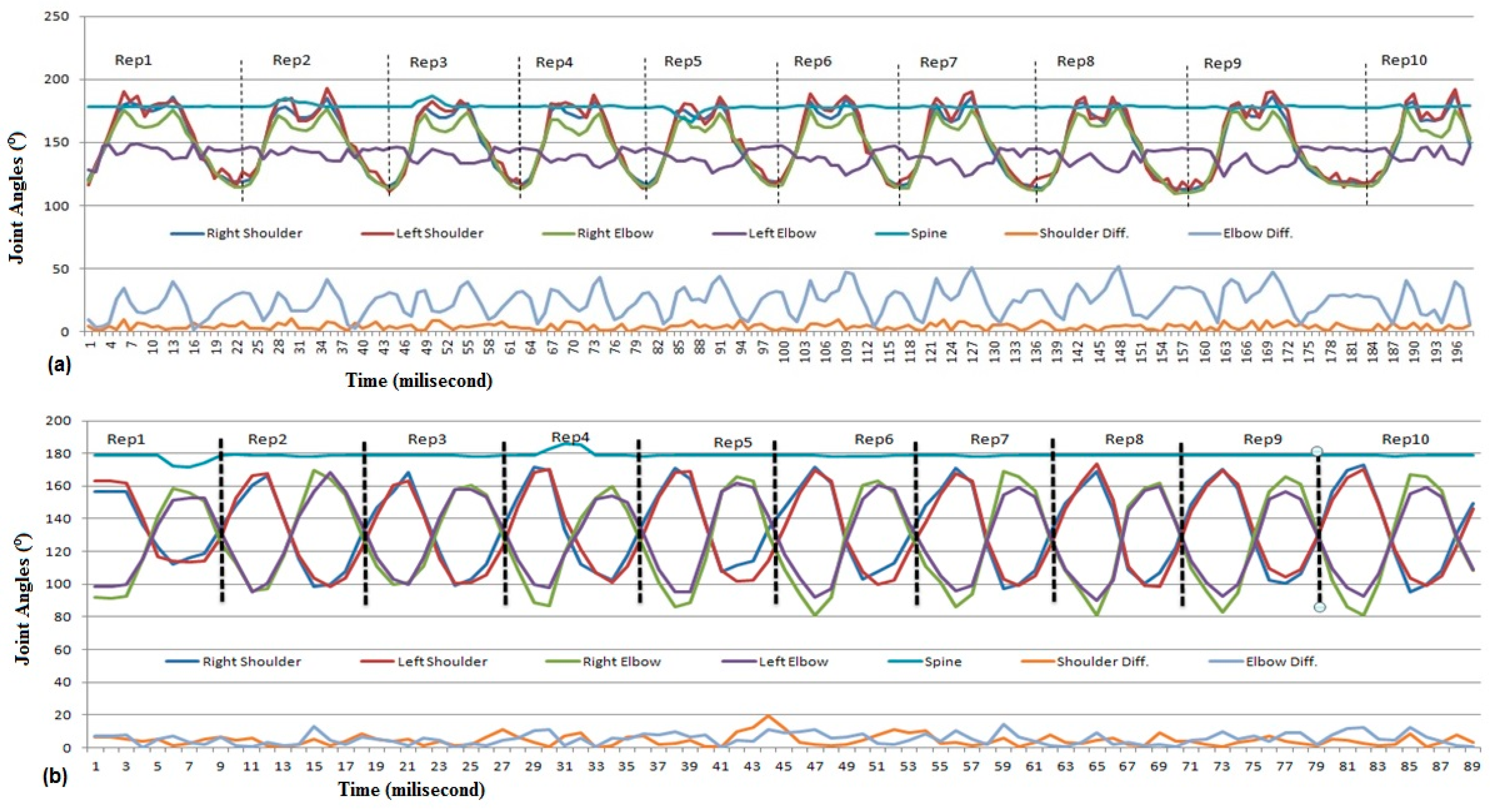
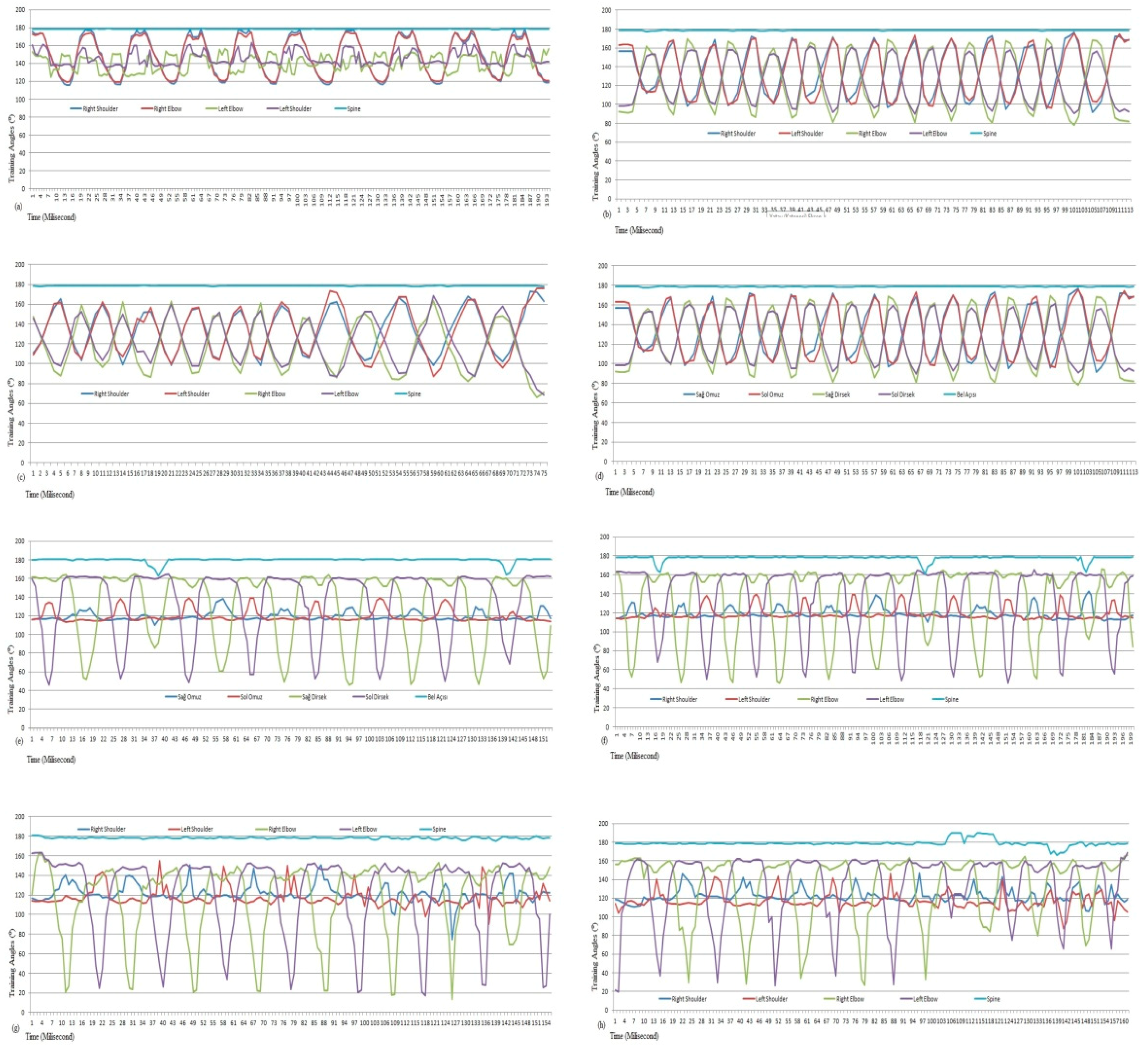
3.1. Kinect V2 Data Obtained from the Trainings
3.2. Decisions of Rule-Based Expert System
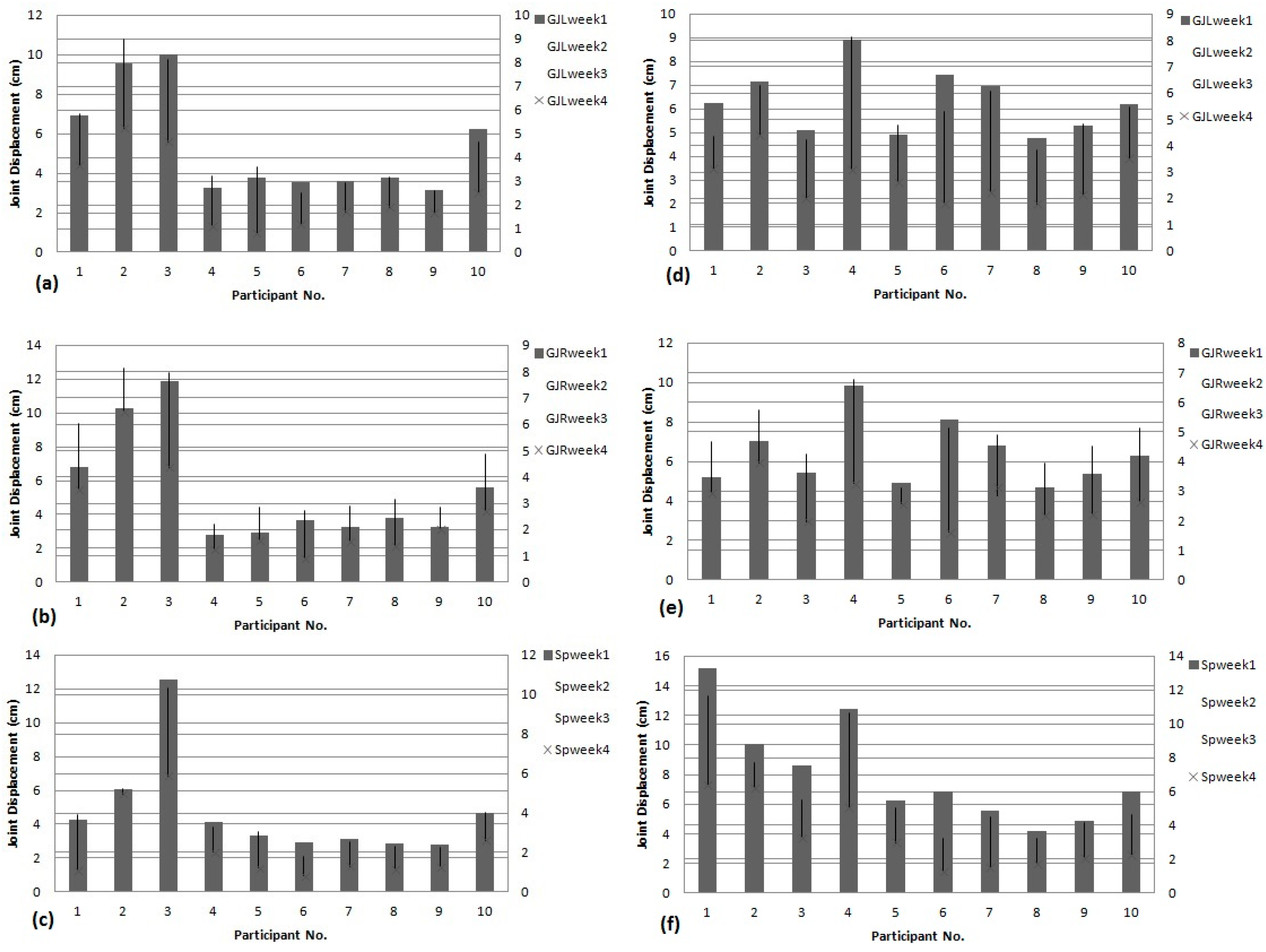
3.3. The Effect of the System on Physical and Cognitive Development
4. Conclusions
5. Data Availability
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Type | Part. No. | Joint Names and Weeks | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GJLweek1 | GJLweek2 | GJLweek3 | GJLweek4 | GJRweek1 | GJRweek2 | GJRweek3 | GJRweek4 | Spweek1 | Spweek2 | Spweek3 | Spweek4 | ||
| DSP | 1 | 6.92 | 5.84 | 4.93 | 3.65 | 6.8 | 6.01 | 4.24 | 3.52 | 4.25 | 3.92 | 1.95 | 1.1 |
| 2 | 9.56 | 9.01 | 6.58 | 5.23 | 10.25 | 8.15 | 7.56 | 6.48 | 6.08 | 5.24 | 5.14 | 4.95 | |
| 3 | 10.02 | 8.11 | 5.66 | 4.66 | 11.88 | 7.94 | 5.22 | 4.37 | 12.58 | 10.33 | 6.62 | 5.87 | |
| 4 | 3.25 | 3.2 | 1.86 | 1.1 | 2.81 | 2.22 | 1.35 | 1.27 | 4.11 | 3.27 | 2.55 | 2 | |
| 5 | 3.78 | 3.61 | 1.66 | 0.8 | 2.94 | 2.85 | 2.01 | 1.6 | 3.31 | 3.08 | 2.82 | 1.2 | |
| 6 | 3.55 | 2.48 | 2.14 | 1.2 | 3.68 | 2.74 | 1.93 | 0.9 | 2.92 | 1.8 | 1.2 | 0.8 | |
| 7 | 3.62 | 2.93 | 2.11 | 1.7 | 3.26 | 2.88 | 2.2 | 1.57 | 3.11 | 2.52 | 2.35 | 1.3 | |
| 8 | 3.76 | 3.15 | 2.56 | 1.9 | 3.82 | 3.15 | 2.17 | 1.37 | 2.85 | 2.31 | 2.1 | 1.15 | |
| 9 | 3.13 | 2.62 | 2.4 | 1.66 | 3.27 | 2.84 | 2.35 | 2.04 | 2.77 | 2.28 | 1.65 | 1.27 | |
| 10 | 6.21 | 4.64 | 3.96 | 2.54 | 5.63 | 4.87 | 3.58 | 2.71 | 4.66 | 4.01 | 3.42 | 2.61 | |
| LR | 1 | 6.25 | 4.35 | 3.48 | 3.12 | 5.21 | 4.66 | 3.32 | 2.96 | 15.22 | 11.64 | 8.77 | 6.4 |
| 2 | 7.13 | 6.27 | 5.4 | 4.41 | 7.02 | 5.74 | 4.31 | 3.96 | 10.1 | 7.72 | 7.26 | 6.21 | |
| 3 | 5.11 | 4.24 | 2.88 | 2.02 | 5.42 | 4.25 | 2.88 | 1.97 | 8.6 | 5.53 | 5.21 | 3.3 | |
| 4 | 8.91 | 8.14 | 5.22 | 3.1 | 9.82 | 6.76 | 4.88 | 3.24 | 12.47 | 10.66 | 8.99 | 5.11 | |
| 5 | 4.9 | 4.77 | 2.95 | 2.64 | 4.92 | 3.11 | 2.56 | 2.57 | 6.24 | 5.01 | 3.58 | 2.99 | |
| 6 | 7.44 | 5.28 | 2.9 | 1.8 | 8.12 | 5.12 | 3.2 | 1.6 | 6.88 | 3.24 | 1.55 | 1.3 | |
| 7 | 6.95 | 6.08 | 4.57 | 2.23 | 6.82 | 4.91 | 2.85 | 3.12 | 5.56 | 4.51 | 2.64 | 1.58 | |
| 8 | 4.75 | 3.84 | 2.98 | 1.79 | 4.68 | 3.94 | 2.69 | 2.18 | 4.21 | 3.26 | 2.49 | 1.77 | |
| 9 | 5.29 | 4.83 | 3.29 | 2.15 | 5.35 | 4.52 | 3.41 | 2.23 | 4.86 | 4.19 | 2.86 | 2.07 | |
| 10 | 6.2 | 5.47 | 4.37 | 3.53 | 6.3 | 5.13 | 3.68 | 2.64 | 6.87 | 4.62 | 3.01 | 2.27 | |
References
- Harris, D.J.; Wilson, M.R.; Vine, S.J. A Systematic Review of Commercial Cognitive Training Devices: Implications for Use in Sport. Front. Psychol. 2018, 9, 709. [Google Scholar] [CrossRef] [PubMed]
- Appelbaum, L.G.; Erickson, G. Sports vision training: A review of the state-of-the-art in digital training techniques. Int. Rev. Sport Exerc. Psychol. 2018, 11, 160–189. [Google Scholar] [CrossRef]
- Silfee, V.J.; Haughton, C.F.; Jake-Schoffman, D.E.; Lopez-Cepero, A.; May, C.N.; Sreedhara, M.; Rosal, M.C.; Lemon, S.C. Objective measurement of physical activity outcomes in lifestyle interventions among adults: A systematic review. Prev. Med. Rep. 2018, 11, 74–80. [Google Scholar] [CrossRef]
- Meredith, S.J.; Dicks, M.; Noel, B.; Wagstaff, C.R.D. A review of behavioural measures and research methodology in sport and exercise psychology. Int. Rev. Sport Exerc. Psychol. 2018, 11, 25–46. [Google Scholar] [CrossRef]
- Torres-Luque, G.; Fernández-García, Á.I.; Cabello-Manrique, D.; Giménez-Egido, J.M.; Ortega-Toro, E. Design and Validation of an Observational Instrument for the Technical-Tactical Actions in Singles Tennis. Front. Psychol. 2018, 9, 2418. [Google Scholar] [CrossRef] [PubMed]
- Young, C.M.; Luo, W.; Gastin, P.; Tran, J.; Dwyer, D.B. The relationship between match performance indicators and outcome in Australian Football. J. Sci. Med. Sport 2019, 22, 467–471. [Google Scholar] [CrossRef] [PubMed]
- Prieto-Lage, I.; Prieto, M.A.; Curran, T.P.; Gutiérrez-Santiago, A. An Accurate and Rapid System to Identify Play Patterns in Tennis Using Video Recording Material: Break Point Situations as a Case Study. J. Hum. Kinet. 2018, 62, 199–212. [Google Scholar] [CrossRef]
- Faraway, J.; Reed, M.P. Statistics for Digital Human Motion Modeling in Ergonomics. Technometrics 2007, 49, 277–290. [Google Scholar] [CrossRef]
- Polášek, P.; Bureš, M.; Šimon, M. Comparison of Digital Tools for Ergonomics in Practice. Procedia Eng. 2015, 100, 1277–1285. [Google Scholar] [CrossRef]
- Zhao, W.; Lun, R.; Gordon, C.; Fofana, A.M.; Espy, D.D.; Reinthal, M.A.; Ekelman, B.; Goodman, G.D.; Niederriter, J.E.; Luo, X. A Human-Centered Activity Tracking System: Toward a Healthier Workplace. IEEE Trans. Hum.-Mach. Syst. 2017, 47, 343–355. [Google Scholar] [CrossRef]
- Di Marco, R.; Rossi, S.; Racic, V.; Cappa, P.; Mazzà, C. Concurrent repeatability and reproducibility analyses of four marker placement protocols for the foot-ankle complex. J. Biomech. 2016, 49, 3168–3176. [Google Scholar] [CrossRef] [PubMed]
- Lim, C.H.; Vats, E.; Chan, C.S. Fuzzy human motion analysis: A review. Pattern Recognit. 2015, 48, 1773–1796. [Google Scholar] [CrossRef]
- Allseits, E.; Kim, K.J.; Bennett, C.; Gailey, R.; Gaunaurd, I.; Agrawal, V. A Novel Method for Estimating Knee Angle Using Two Leg-Mounted Gyroscopes for Continuous Monitoring with Mobile Health Devices. Sensors 2018, 18, 2759. [Google Scholar] [CrossRef]
- El-Gohary, M.; McNames, J. Shoulder and Elbow Joint Angle Tracking With Inertial Sensors. IEEE Trans. Biomed. Eng. 2012, 59, 2635–2641. [Google Scholar] [CrossRef] [PubMed]
- van der Kruk, E.; Reijne, M.M. Accuracy of human motion capture systems for sport applications; state-of-the-art review. Eur. J. Sport Sci. 2018, 18, 806–819. [Google Scholar] [CrossRef] [PubMed]
- Choppin, S.; Lane, B.; Wheat, J. The accuracy of the Microsoft Kinect in joint angle measurement. Sports Technol. 2014, 7, 98–105. [Google Scholar] [CrossRef]
- Wu, H.; Shao, J.; Xu, X.; Ji, Y.; Shen, F.; Shen, H.T. Recognition and Detection of Two-Person Interactive Actions Using Automatically Selected Skeleton Features. IEEE Trans. Hum.-Mach. Syst. 2018, 48, 304–310. [Google Scholar] [CrossRef]
- Diaz-Monterrosas, P.R. A Brief Review on the Validity and Reliability of Microsoft Kinect Sensors for Functional Assessment Applications. J. Adv. Electr. Comput. Eng 2018, 18, 131–136. [Google Scholar] [CrossRef]
- Reither, L.R.; Foreman, M.H.; Migotsky, N.; Haddix, C.; Engsberg, J.R. Upper extremity movement reliability and validity of the Kinect version 2. Disabil. Rehabil. Assist. Technol. 2018, 13, 54–59. [Google Scholar] [CrossRef]
- Bourdon, P.C.; Cardinale, M.; Murray, A.; Gastin, P.; Kellmann, M.; Varley, M.C.; Gabbett, T.J.; Coutts, A.J.; Burgess, D.J.; Gregson, W.; et al. Monitoring Athlete Training Loads: Consensus Statement. Int. J. Sports Physiol. Perform. 2017, 12, S2–S161. [Google Scholar] [CrossRef]
- Debes, C.; Merentitis, A.; Sukhanov, S.; Niessen, M.; Frangiadakis, N.; Bauer, A. Monitoring Activities of Daily Living in Smart Homes: Understanding human behavior. IEEE Signal Process. Mag. 2016, 33, 81–94. [Google Scholar] [CrossRef]
- Marcroft, C.; Khan, A.; Embleton, N.D.; Trenell, M.; Plötz, T. Movement Recognition Technology as a Method of Assessing Spontaneous General Movements in High Risk Infants. Front. Neurol. 2015, 5, 284. [Google Scholar] [CrossRef] [PubMed]
- Kumari, P.; Mathew, L.; Syal, P. Increasing trend of wearables and multimodal interface for human activity monitoring: A review. Biosens. Bioelectron. 2017, 90, 298–307. [Google Scholar] [CrossRef] [PubMed]
- Lin, J.F.; Karg, M.; Kulić, D. Movement Primitive Segmentation for Human Motion Modeling: A Framework for Analysis. IEEE Trans. Hum.-Mach. Syst. 2016, 46, 325–339. [Google Scholar] [CrossRef]
- Agahian, S.; Negin, F.; Köse, C. Improving bag-of-poses with semi-temporal pose descriptors for skeleton-based action recognition. Vis. Comput. 2019, 35, 591–607. [Google Scholar] [CrossRef]
- Haque, A.; Peng, B.; Luo, Z.; Alahi, A.; Yeung, S.; Li, F. Towards Viewpoint Invariant 3D Human Pose Estimation; Springer International Publishing: Cham, Switzerland, 2016; pp. 160–177. [Google Scholar]
- Saenz-de-Urturi, Z.; Garcia-Zapirain Soto, B. Kinect-Based Virtual Game for the Elderly that Detects Incorrect Body Postures in Real Time. Sensors 2016, 16, 704. [Google Scholar] [CrossRef]
- Zhao, W. On automatic assessment of rehabilitation exercises with realtime feedback. In Proceedings of the 2016 IEEE International Conference on Electro Information Technology (EIT), Grand Forks, ND, USA, 19–21 May 2016; pp. 0376–0381. [Google Scholar]
- Fernandez-Cervantes, V.; Neubauer, N.; Hunter, B.; Stroulia, E.; Liu, L. VirtualGym: A kinect-based system for seniors exercising at home. Entertain. Comput. 2018, 27, 60–72. [Google Scholar] [CrossRef]
- Mehdi, K.; Chadi El, K.; Jacob, B.; Leili, J. Gesture based Human Computer Interaction for Athletic Training. Int. J. Appl. Exerc. Physiol. 2017, 6, 60–65. [Google Scholar]
- Elaoud, A.; Barhoumi, W.; Zagrouba, E.; Agrebi, B. Skeleton-based comparison of throwing motion for handball players. J. Ambient Intell. Humaniz. Comput. 2019, 11, 419–431. [Google Scholar] [CrossRef]
- Scherer, M.; Unterbrunner, A.; Riess, B.; Kafka, P. Development of a System for Supervised Training at Home with Kinect V2. Procedia Eng. 2016, 147, 466–471. [Google Scholar] [CrossRef][Green Version]
- Mateo, F.; Soria-Olivas, E.; Carrasco, J.J.; Bonanad, S.; Querol, F.; Pérez-Alenda, S. HemoKinect: A Microsoft Kinect V2 Based Exergaming Software to Supervise Physical Exercise of Patients with Hemophilia. Sensors 2018, 18, 2439. [Google Scholar] [CrossRef] [PubMed]
- de Urturi, Z.S.; Méndez Zorilla, A.; García Zapirain, B. JeWheels: Kinect Based Serious Game Aimed at Wheelchair Users; Springer: Berlin/Heidelberg, Germany, 2012; pp. 391–398. [Google Scholar]
- Yu, X.; Xiong, S. A Dynamic Time Warping Based Algorithm to Evaluate Kinect-Enabled Home-Based Physical Rehabilitation Exercises for Older People. Sensors 2019, 19, 2882. [Google Scholar] [CrossRef] [PubMed]
- Su, C.-H. Developing and evaluating effectiveness of 3D game-based rehabilitation system for Total Knee Replacement Rehabilitation patients. Multimed. Tools Appl. 2016, 75, 10037–10057. [Google Scholar] [CrossRef]
- Parisi, G.I.; Magg, S.; Wermter, S. Human motion assessment in real time using recurrent self-organization. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 71–76. [Google Scholar]
- Cikajlo, I.; Hukić, A.; Dolinšek, I.; Zajc, D.; Vesel, M.; Krizmanič, T.; Blažica, B.; Biasizzo, A.; Novak, F.; Peterlin Potisk, K. Can telerehabilitation games lead to functional improvement of upper extremities in individuals with Parkinson’s disease? Int. J. Rehabil. Res. 2018, 41, 230–238. [Google Scholar] [CrossRef] [PubMed]
- Pachoulakis, I.; Papadopoulos, N.; Analyti, A. Kinect-Based Exergames Tailored to Parkinson Patients. Int. J. Comput. Games Technol. 2018, 2018, 2618271. [Google Scholar] [CrossRef]
- Rocha, A.P.; Choupina, H.; Fernandes, J.M.; Rosas, M.J.; Vaz, R.; Cunha, J.P.S. Kinect v2 based system for Parkinson’s disease assessment. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 1279–1282. [Google Scholar]
- Lavallee, M.E.; Balam, T. An Overview of Strength Training Injuries: Acute and Chronic. Curr. Sports Med. Rep. 2010, 9, 307–313. [Google Scholar] [CrossRef] [PubMed]
- Yom, J.P.; Owens, T.; Arnett, S.; Beebe, J.; Son, V. The effects of an unanticipated side-cut on lower extremity kinematics and ground reaction forces during a drop landing. Sport Biomech. 2019, 18, 414–425. [Google Scholar] [CrossRef]
- Schoenfeld, B.J. The Mechanisms of Muscle Hypertrophy and Their Application to Resistance Training. J. Strength Cond. Res. 2010, 24, 2857–2872. [Google Scholar] [CrossRef]
- Williams, T.D.; Tolusso, D.V.; Fedewa, M.V.; Esco, M.R.J.S.M. Comparison of Periodized and Non-Periodized Resistance Training on Maximal Strength: A Meta-Analysis. Sports Med. 2017, 47, 2083–2100. [Google Scholar] [CrossRef]
- Wallace, B.J.; Bergstrom, H.C.; Butterfield, T.A. Muscular bases and mechanisms of variable resistance training efficacy. Int. J. Sports Sci. Coach. 2018, 13, 1177–1188. [Google Scholar] [CrossRef]
- Chen, M.-D.; Kuo, Y.-H.; Chang, Y.-C.; Hsu, S.-T.; Kuo, C.-C.; Chang, J.-J. Influences of Aerobic Dance on Cognitive Performance in Adults with Schizophrenia. Occup. Ther. Int. 2016, 23, 346–356. [Google Scholar] [CrossRef] [PubMed]
- Vogel, P.A.; Hagen, R.; Hjemdal, O.; Solem, S.; Smeby, M.C.B.; Strand, E.R.; Fisher, P.; Nordahl, H.M.; Wells, A. Metacognitive Therapy Applications in Social Anxiety Disorder: An Exploratory Study of the Individual and Combined Effects of the Attention Training Technique and Situational Attentional Refocusing. J. Exp. Psychopathol. 2016, 7, 608–618. [Google Scholar] [CrossRef]
- Wang, Y.T.; Li, Z.; Yang, Y.; Zhong, Y.; Lee, S.-Y.; Chen, S.; Chen, Y.-P. Effects of wheelchair Tai Chi on physical and mental health among elderly with disability. Res. Sports Med. 2016, 24, 157–170. [Google Scholar] [CrossRef] [PubMed]
- Hedberg, E.C.; Ayers, S. The power of a paired t-test with a covariate. Soc. Sci. Res. 2015, 50, 277–291. [Google Scholar] [CrossRef]
- Aktas, S.; Guven, F.; Yusuf, E.R. Effects of badminton training on some physical parameters in badminton players aged 10 to 12 years. Turk. J. Sport Exerc. 2017, 19, 345–349. [Google Scholar] [CrossRef][Green Version]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences; Lawrence Erlbaum Associates, Inc.: Hillsdale, NJ, USA, 1977; pp. 75–105. [Google Scholar]
- Chang, P.-S.; Knobf, M.T.; Oh, B.; Funk, M. Physical and psychological effects of Qigong exercise in community-dwelling older adults: An exploratory study. Geriatr. Nurs. 2018, 39, 88–94. [Google Scholar] [CrossRef]
- Kim, S. Exploring the field application of combined cognitive-motor program with mild cognitive impairment elderly patients. J. Exerc. Rehabil. 2018, 14, 817–820. [Google Scholar] [CrossRef]
- Kim, T.K. T test as a parametric statistic. Korean J. Anesthesiol. 2015, 68, 540–546. [Google Scholar] [CrossRef]
- Xu, M.; Fralick, D.; Zheng, J.Z.; Wang, B.; Tu, X.M.; Feng, C. The Differences and Similarities Between Two-Sample T-Test and Paired T-Test. Shanghai Arch. Psychiatry 2017, 29, 184–188. [Google Scholar]
- Slob, W. A general theory of effect size, and its consequences for defining the benchmark response (BMR) for continuous endpoints. Crit. Rev. Toxicol. 2017, 47, 342–351. [Google Scholar] [CrossRef]
- Clark, R.A.; Mentiplay, B.F.; Hough, E.; Pua, Y.H. Three-dimensional cameras and skeleton pose tracking for physical function assessment: A review of uses, validity, current developments and Kinect alternatives. Gait Posture 2019, 68, 193–200. [Google Scholar] [CrossRef] [PubMed]
- Konstantinidis, E.I.; Bamparopoulos, G.; Bamidis, P.D. Moving Real Exergaming Engines on the Web: The webFitForAll Case Study in an Active and Healthy Ageing Living Lab Environment. IEEE J. Biomed. Health Inform. 2017, 21, 859–866. [Google Scholar] [CrossRef]
- Naeemabadi, M.; Dinesen, B.; Andersen, O.K.; Hansen, J. Influence of a Marker-Based Motion Capture System on the Performance of Microsoft Kinect v2 Skeleton Algorithm. IEEE Sens. J. 2019, 19, 171–179. [Google Scholar] [CrossRef]
- Sutthiprapa, S.; Vanijja, V.; Likitwon, T. The deadlift form analysis system using Microsoft Kinect. Procedia Comput. Sci. 2017, 111, 174–182. [Google Scholar] [CrossRef]
- Bailey, R. Sport, physical activity and educational achievement—Towards an explanatory model. Sport Soc. 2017, 20, 768–788. [Google Scholar] [CrossRef]
- Reeves, R.K.; Laskowski, E.R.; Smith, J. Weight Training Injuries. Physician Sportsmed. 1998, 26, 54–73. [Google Scholar] [CrossRef]
- Taniguchi, Y. Lateral specificity in resistance training: The effect of bilateral and unilateral training. Eur. J. Appl. Physiol. Occup. Physiol. 1997, 75, 144–150. [Google Scholar] [CrossRef]
- Arandjelović, O. Does cheating pay: The role of externally supplied momentum on muscular force in resistance exercise. Eur. J. Appl. Physiol. 2013, 113, 135–145. [Google Scholar] [CrossRef]
- Andersen, L.L.; Vinstrup, J.; Jakobsen, M.D.; Sundstrup, E. Validity and reliability of elastic resistance bands for measuring shoulder muscle strength. Scand. J. Med. Sci. Sports 2017, 27, 887–894. [Google Scholar] [CrossRef] [PubMed]
- Keogh, J.W.L.; Aickin, S.E.; Oldham, A.R.H. Can Common Measures of Core Stability Distinguish Performance in a Shoulder Pressing Task Under Stable and Unstable Conditions? J. Strength Cond. Res. 2010, 24, 422–429. [Google Scholar] [CrossRef] [PubMed]
- Luczak, J.; Bosak, A.; Riemann, B.L. Shoulder Muscle Activation of Novice and Resistance Trained Women during Variations of Dumbbell Press Exercises. J. Sports Med. 2013, 2013, 612650. [Google Scholar] [CrossRef] [PubMed]
- Seguin, R.A.; Epping, J.N.; Buchner, D.; Bloch, R.; Nelson, M.E. Growing Stronger; Strength Training for Older Adults. Available online: https://stacks.cdc.gov/view/cdc/11447 (accessed on 11 September 2019).
- Willardson, J.M.; Fontana, F.E.; Bressel, E. Effect of Surface Stability on Core Muscle Activity for Dynamic Resistance Exercises. Int. J. Sports Physiol. Perform. 2009, 4, 97. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Gonçalves, G.S.; Cardozo, P.L.; Valentini, N.C.; Chiviacowsky, S. Enhancing performance expectancies through positive comparative feedback facilitates the learning of basketball free throw in children. Psychol. Sport Exerc. 2018, 36, 174–177. [Google Scholar] [CrossRef]
- Selek, M.; Başçiftçi, F.; Örücü, S. Designing medical expert system based on logical reduced rule for basic malaria diagnosis from malaria signs and symptoms. World J. Eng. 2017, 14, 227–230. [Google Scholar] [CrossRef]
- Wagner, W.P. Trends in expert system development: A longitudinal content analysis of over thirty years of expert system case studies. Expert Syst. Appl. 2017, 76, 85–96. [Google Scholar] [CrossRef]
- Başçiftçi, F.; Avuçlu, E. An expert system design to diagnose cancer by using a new method reduced rule base. Comput. Methods Programs Biomed. 2018, 157, 113–120. [Google Scholar] [CrossRef] [PubMed]
- Microsoft How to Programmatically Compile Code Using C# Compiler. Available online: https://support.microsoft.com/tr-tr/help/304655/how-to-programmatically-compile-code-using-c-compiler (accessed on 9 March 2019).
- Microsoft CSharpCodeProvider Class. Available online: https://docs.microsoft.com/en-us/dotnet/api/microsoft.csharp.csharpcodeprovider?redirectedfrom=MSDN&view=netframework-4.8 (accessed on 14 March 2019).
- Microsoft Dynamic-Link Library Search Order. Available online: https://docs.microsoft.com/en-us/windows/win32/dlls/dynamic-link-library-search-order?redirectedfrom=MSDN (accessed on 22 March 2019).
- Al-Ajlan, A. The comparison between forward and backward chaining. Int. J. Mach. Learn. Comput. 2015, 5, 106. [Google Scholar] [CrossRef]
- Sajid, A.; Hussain, K. Rule Based (Forward Chaining/Data Driven) Expert System for Node Level Congestion Handling in Opportunistic Network. Mob. Netw. Appl. 2018, 23, 446–455. [Google Scholar] [CrossRef]
- Durall, C.J.; Manske, R.C.; Davies, G.J. Avoiding Shoulder Injury From Resistance Training. Strength Cond. J. 2001, 23, 10. [Google Scholar] [CrossRef]
- Davies, T.; Orr, R.; Halaki, M.; Hackett, D. Effect of Training Leading to Repetition Failure on Muscular Strength: A Systematic Review and Meta-Analysis. Sports Med. 2016, 46, 487–502. [Google Scholar] [CrossRef]
- McCurdy, K.; Vela, L. Resistance Training for Shoulder Complex Stabilization. Int. J. Sports Sci. Coach. 2015, 10, 933–947. [Google Scholar] [CrossRef]
- Koyama, T.; Miyashita, K.; Matsushita, Y. Relationship between shoulder abduction angle and shoulder joint complex angle at shoulder maximum external rotation during throwing motion. Physiotherapy 2015, 101, e792–e793. [Google Scholar] [CrossRef][Green Version]
- McKean, M.R.; Burkett, B.J. Overhead shoulder press—In-front of the head or behind the head? J. Sport Health Sci. 2015, 4, 250–257. [Google Scholar] [CrossRef]
- Adelsberger, R.; Tröster, G. Experts lift differently: Classification of weight-lifting athletes. In Proceedings of the 2013 IEEE International Conference on Body Sensor Networks, Cambridge, MA, USA, 6–9 May 2013; pp. 1–6. [Google Scholar]
- Ericsson, K.A. Expertise and individual differences: The search for the structure and acquisition of experts’ superior performance. Wiley Interdiscip. Rev. Cogn. Sci. 2017, 8, e1382. [Google Scholar] [CrossRef] [PubMed]
- Jeong, H.; Yamada, K.; Kido, M.; Okada, S.; Nomura, T.; Ohno, Y. Analysis of Difference in Center-of-Pressure Positions Between Experts and Novices During Asymmetric Lifting. IEEE J. Transl. Eng. Health Med. 2016, 4, 1–11. [Google Scholar] [CrossRef]
- Örücü, S.; Selek, M. Design and Validation of Multichannel Wireless Wearable SEMG System for Real-Time Training Performance Monitoring. J. Healthc. Eng. 2019, 2019, 4580645. [Google Scholar] [CrossRef]
- Baptista, R.; Antunes, M.; Shabayek, A.E.R.; Aouada, D.; Ottersten, B. Flexible feedback system for posture monitoring and correction. In Proceedings of the 2017 Fourth International Conference on Image Information Processing (ICIIP), Shimla, India, 21–23 December 2017; pp. 1–6. [Google Scholar]
- Romano, G.; Schneider, J.; Drachsler, H. Dancing Salsa with Machines—Filling the Gap of Dancing Learning Solutions. Sensors 2019, 19, 3661. [Google Scholar] [CrossRef]
- Ojeda-Castelo, J.J.; Piedra-Fernandez, J.A.; Iribarne, L.; Bernal-Bravo, C. KiNEEt: Application for learning and rehabilitation in special educational needs. Multimed. Tools Appl. 2018, 77, 24013–24039. [Google Scholar] [CrossRef]
- Rybarczyk, Y.; Kleine Deters, J.; Cointe, C.; Esparza, D. Smart Web-Based Platform to Support Physical Rehabilitation. Sensors 2018, 18, 1344. [Google Scholar] [CrossRef]
- Yadav, S.K.; Singh, A.; Gupta, A.; Raheja, J.L. Real-time Yoga recognition using deep learning. Neural Comput. Appl. 2019, 31, 9349–9361. [Google Scholar] [CrossRef]
- Bačić, B.; Hume, P.A. Computational Intelligence for Qualitative Coaching Diagnostics: Automated Assessment of Tennis Swings to Improve Performance and Safety. Big Data 2018, 6, 291–304. [Google Scholar] [CrossRef]
- Choi, W.; Joo, Y.; Lee, S. Pilates exercise focused on ankle movements for improving gait ability in older women. J. Women Aging 2019, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.H.; Han, J.H.; Jin, Y.Y.; Lee, I.H.; Hong, H.R.; Kang, H.S. Poor physical fitness is independently associated with mild cognitive impairment in elderly Koreans. Biol. Sport 2016, 33, 57–62. [Google Scholar] [CrossRef] [PubMed]









| Systems | S | MA | F | SE | UT | UR | PA | CA | POA | MMA |
|---|---|---|---|---|---|---|---|---|---|---|
| [29] | √ | √ | X | √ | √ | √ | √ | X | √ | X |
| [30] | X | √ | X | √ | √ | X | √ | X | √ | √ |
| [31] | X | √ | X | √ | √ | X | √ | X | √ | X |
| [32] | √ | √ | X | √ | √ | X | √ | X | √ | X |
| [33] | √ | √ | X | √ | √ | √ | √ | √ | √ | √ |
| [34] | √ | X | X | √ | X | √ | √ | √ | √ | X |
| [35] | √ | √ | X | √ | √ | X | √ | √ | √ | √ |
| [36] | √ | √ | X | √ | X | √ | √ | X | √ | X |
| [37] | √ | X | X | √ | √ | √ | X | X | √ | √ |
| [38,39,40] | √ | X | X | √ | X | √ | X | X | √ | √ |
| Proposed System | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ |
| Warning No. | Warnings |
|---|---|
| 1 | Please stand upright |
| 2 | Feet should be slightly narrower than the shoulder |
| 3 | The angle of the arm with the elbow is small |
| 4 | The elbows should not be below the shoulder line, please choose lighter weights |
| 5 | The wrist should not be below the elbow line |
| 6 | The elbows should be positioned at right angles |
| 7 | The elbows and shoulders are not aligned, please push up the weights or choose lighter weights |
| 8 | Raise your elbows |
| 9 | Good Posture |
| Case. | R1 | R2 | R3 | R4 | R5 | R6 | R7 | R8 | Y |
|---|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| 2 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| … | … | … | … | … | … | … | … | … | … |
| 7 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 |
| … | … | … | … | … | … | … | … | … | … |
| 135 | 1 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 2 |
| … | … | … | … | … | … | … | … | … | … |
| 248 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 1 |
| … | … | … | … | … | … | … | … | … | … |
| Case. | R1 | R2 | R3 | R4 | R5 | R6 | R7 | R8 | Y |
|---|---|---|---|---|---|---|---|---|---|
| … | … | … | … | … | … | … | … | … | … |
| 31 | 0 | 0 | 0 | X | X | 1 | 1 | 1 | 2 |
| … | … | … | … | … | … | … | … | … | … |
| 199 | 1 | X | 0 | 0 | 1 | 1 | 1 | 1 | 2 |
| … | … | … | … | … | … | … | … | … | … |
| 249 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | X | 6 |
| … | … | … | … | … | … | … | … | … | … |
| Y | Output Cases | Rules Conditions | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Q1 | Q2 | Q3 | Q4 | Q5 | Q6 | Q7 | Q8 | ||
| 1 | 1xxx1111 | 1 | x | x | x | 1 | 1 | 1 | 1 |
| 2 | 111x1x11 | 1 | 1 | 1 | x | 1 | x | 1 | 1 |
| Participant No. | Age | Gender | Weight (kg) | Height (cm) |
|---|---|---|---|---|
| 1 | 21 | Male | 80 | 163 |
| 2 | 25 | Male | 82.3 | 178 |
| 3 | 29 | Male | 87 | 180 |
| 4 | 33 | Male | 85 | 177 |
| 5 | 37 | Male | 104.6 | 193 |
| 6 | 27 | Female | 70 | 180 |
| 7 | 22 | Female | 62 | 160 |
| 8 | 24 | Female | 60 | 172 |
| 9 | 19 | Female | 58 | 167 |
| 10 | 21 | Female | 58 | 165 |
| Part. No. | Decision Type | Reps | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||
| DSP | 1 | System | √ | √ | X | X | √ | X | √ | √ | √ | √ |
| Sys. Warnings | 9 | 9 | 3 | 3 | 9 | 4 | 9 | 9 | 9 | 9 | ||
| Trainer | O | √ | X | X | √ | X | √ | √ | O | O | ||
| 2 | System | √ | √ | √ | √ | √ | X | X | X | √ | √ | |
| Sys. Warnings | 9 | 9 | 9 | 9 | 9 | 6 | 8 | 1 | 9 | 9 | ||
| Trainer | √ | √ | √ | √ | √ | O | X | X | O | √ | ||
| 3 | System | √ | √ | √ | X | X | √ | X | X | √ | X | |
| Sys. Warnings | 9 | 9 | 9 | 7 | 2 | 9 | 1 | 1 | 9 | 1 | ||
| Trainer | √ | √ | O | √ | X | √ | X | √ | O | X | ||
| 4 | System | X | X | √ | √ | X | √ | √ | X | √ | X | |
| Sys. Warnings | 6 | 4 | 9 | 9 | 3 | 9 | 9 | 3 | 9 | 1 | ||
| Trainer | X | √ | O | √ | O | O | √ | X | O | X | ||
| 5 | System | √ | √ | √ | √ | √ | √ | X | X | X | X | |
| Sys. Warnings | 9 | 9 | 9 | 9 | 9 | 9 | 1 | 8 | 4 | 1 | ||
| Trainer | √ | √ | √ | √ | √ | √ | X | X | O | X | ||
| 6 | System | X | √ | √ | X | √ | X | √ | X | X | √ | |
| Sys. Warnings | 6 | 9 | 9 | 6 | 9 | 8 | 9 | 4 | 3 | 7 | ||
| Trainer | X | O | √ | X | √ | X | √ | √ | √ | O | ||
| 7 | System | √ | √ | X | √ | √ | X | √ | √ | √ | X | |
| Sys. Warnings | 9 | 9 | 1 | 9 | 9 | 3 | 9 | 9 | 9 | 8 | ||
| Trainer | √ | √ | X | √ | √ | X | O | O | √ | O | ||
| 8 | System | X | X | √ | √ | X | X | √ | √ | X | X | |
| Sys. Warnings | 1 | 1 | 9 | 9 | 3 | 3 | 9 | 9 | 3 | 1 | ||
| Trainer | X | X | O | O | X | √ | √ | √ | X | X | ||
| 9 | System | X | X | √ | √ | √ | √ | X | √ | √ | √ | |
| Sys. Warnings | 8 | 8 | 9 | 9 | 9 | 9 | 4 | 9 | 9 | 9 | ||
| Trainer | X | √ | √ | √ | √ | √ | √ | √ | √ | √ | ||
| 10 | System | √ | √ | √ | √ | √ | √ | √ | √ | √ | X | |
| Sys. Warnings | 9 | 9 | 9 | 9 | 9 | 9 | 9 | 9 | 9 | 1 | ||
| Trainer | √ | √ | √ | √ | √ | √ | √ | √ | √ | X | ||
| LR | 1 | System | √ | √ | X | √ | √ | √ | X | X | √ | √ |
| Sys. Warnings | 9 | 9 | 1 | 9 | 9 | 9 | 8 | 3 | 9 | 9 | ||
| Trainer | √ | √ | √ | √ | √ | √ | X | √ | √ | √ | ||
| 2 | System | √ | √ | √ | √ | X | X | √ | √ | √ | √ | |
| Sys. Warnings | 9 | 9 | 9 | 9 | 1 | 5 | 9 | 9 | 9 | 9 | ||
| Trainer | √ | √ | O | O | X | X | √ | √ | √ | √ | ||
| 3 | System | X | X | √ | X | X | X | √ | √ | √ | X | |
| Sys. Warnings | 5 | 5 | 9 | 3 | 7 | 7 | 9 | 9 | 9 | 3 | ||
| Trainer | √ | √ | √ | √ | X | X | X | √ | √ | √ | ||
| 4 | System | √ | √ | X | X | √ | √ | X | X | X | X | |
| Sys. Warnings | 9 | 9 | 1 | 3 | 9 | 9 | 7 | 6 | 1 | 5 | ||
| Trainer | √ | √ | X | X | √ | √ | O | X | X | X | ||
| 5 | System | √ | √ | √ | √ | √ | √ | √ | √ | X | X | |
| Sys. Warnings | 9 | 9 | 9 | 9 | 9 | 9 | 9 | 9 | 1 | 1 | ||
| Trainer | X | X | √ | √ | √ | √ | O | X | X | O | ||
| 6 | System | √ | √ | X | √ | √ | X | X | √ | X | √ | |
| Sys. Warnings | 9 | 9 | 5 | 9 | 9 | 1 | 1 | 9 | 7 | 9 | ||
| Trainer | √ | √ | X | √ | √ | X | X | O | √ | √ | ||
| 7 | System | X | X | X | √ | √ | √ | X | √ | √ | √ | |
| Sys. Warnings | 6 | 1 | 1 | 9 | 9 | 9 | 5 | 9 | 9 | 9 | ||
| Trainer | X | X | O | √ | √ | O | X | √ | √ | √ | ||
| 8 | System | √ | √ | X | X | √ | √ | √ | √ | √ | X | |
| Sys. Warnings | 9 | 9 | 6 | 7 | 9 | 9 | 9 | 9 | 9 | 5 | ||
| Trainer | √ | √ | √ | X | √ | √ | √ | √ | O | X | ||
| 9 | System | √ | √ | √ | X | X | O | X | √ | √ | √ | |
| Sys. Warnings | 9 | 9 | 9 | 5 | 1 | 9 | 1 | 9 | 9 | 9 | ||
| Trainer | √ | √ | √ | √ | √ | √ | X | √ | √ | √ | ||
| 10 | System | √ | X | X | √ | √ | X | X | √ | √ | X | |
| Sys. Warnings | 9 | 5 | 5 | 9 | 9 | 1 | 7 | 9 | 9 | 5 | ||
| Trainer | √ | X | √ | √ | O | O | X | √ | √ | X | ||
| Participant No. | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||
| Improvement According to Training Type | DSP | GJL% | 47.25 | 45.29 | 53.49 | 66.15 | 78.84 | 66.20 | 53.04 | 49.47 | 46.96 | 59.10 |
| GJR% | 48.24 | 36.78 | 63.22 | 54.80 | 45.58 | 75.54 | 51.84 | 64.14 | 37.61 | 51.87 | ||
| S% | 74.12 | 18.59 | 53.34 | 51.34 | 63.75 | 72.60 | 58.20 | 59.65 | 54.15 | 43.99 | ||
| LR | GJL% | 50.08 | 38.15 | 60.47 | 65.21 | 46.12 | 75.81 | 67.91 | 62.32 | 59.36 | 43.06 | |
| GJR% | 43.19 | 43.59 | 63.65 | 67.01 | 47.76 | 80.30 | 54.25 | 53.42 | 58.32 | 58.10 | ||
| S% | 57.95 | 38.51 | 61.63 | 59.02 | 52.08 | 81.10 | 71.58 | 57.96 | 57.41 | 66.96 | ||
| Pairs No. | Pair Groups | Paired Differences | t | df | Sig, (2-Tailed) | Effect Size (d) | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| Mean | Std. Dev | Std. Err. Mean | 95% Confidence Interval of the Difference | |||||||
| Lower | Upper | |||||||||
| Pair 1 | DSP_GJL1–DSP_GJL2 | 0.82100 | 0.58936 | 0.18637 | 0.39940 | 1.24260 | 4.405 | 9 | 0.002 | 0.328 |
| Pair 2 | DSP_GJL1–DSP_GJL3 | 1.99400 | 1.04455 | 0.33032 | 1.24677 | 2.74123 | 6.037 | 9 | 0.000 | 0.884 |
| Pair 3 | DSP_GJL1–DSP_GJL4 | 2.93600 | 1.23701 | 0.39118 | 2.05110 | 3.82090 | 7.506 | 9 | 0.000 | 1.351 |
| Pair 4 | DSP_GJR1–DSP_GJR2 | 1.06900 | 1.14143 | 0.36095 | 0.25247 | 1.88553 | 2.962 | 9 | 0.016 | 0.383 |
| Pair 5 | DSP_GJR1–DSP_GJR3 | 2.17300 | 1.69575 | 0.53624 | 0.95994 | 3.38606 | 4.052 | 9 | 0.003 | 0.814 |
| Pair 6 | DSP_GJR1–DSP_GJR4 | 2.85100 | 1.85241 | 0.58578 | 1.52586 | 4.17614 | 4.867 | 9 | 0.001 | 1.093 |
| Pair 7 | DSP_S1–DSP_S2 | 0.78800 | 0.57569 | 0.18205 | 0.37618 | 1.19982 | 4.329 | 9 | 0.002 | 0.288 |
| Pair 8 | DSP_S1–DSP_S3 | 1.68400 | 1.59516 | 0.50443 | 0.54289 | 2.82511 | 3.338 | 9 | 0.009 | 0.698 |
| Pair 9 | DSP_S1–DSP_S4 | 2.43900 | 1.59002 | 0.50281 | 1.30157 | 3.57643 | 4.851 | 9 | 0.001 | 0.998 |
| Pair 10 | LR_GJL1–LR_GJL2 | 0.96600 | 0.61281 | 0.19379 | 0.52762 | 1.40438 | 4.985 | 9 | 0.001 | 0.744 |
| Pair 11 | LR_GJL1–LR_GJL3 | 2.48900 | 0.93475 | 0.29560 | 1.82032 | 3.15768 | 8.420 | 9 | 0.000 | 2.114 |
| Pair 12 | LR_GJL1–LR_GJL4 | 3.61400 | 1.28388 | 0.40600 | 2.69556 | 4.53244 | 8.901 | 9 | 0.000 | 3.225 |
| Pair 13 | LR_GJR1–LR_GJR2 | 1.55200 | 0.88919 | 0.28119 | 0.91591 | 2.18809 | 5.519 | 9 | 0.000 | 1.150 |
| Pair 14 | LR_GJR1–LR_GJR3 | 2.98800 | 1.18392 | 0.37439 | 2.14108 | 3.83492 | 7.981 | 9 | 0.000 | 2.364 |
| Pair 15 | LR_GJR1–LR_GJR4 | 3.71900 | 1.57827 | 0.49909 | 2.58998 | 4.84802 | 7.452 | 9 | 0.000 | 2.972 |
| Pair 16 | LR_S1–LR_S2 | 2.06300 | 1.10056 | 0.34803 | 1.27571 | 2.85029 | 5.928 | 9 | 0.000 | 0.630 |
| Pair 17 | LR_S1–LR_S3 | 1.40200 | 0.74800 | 0.23654 | 0.86691 | 1.93709 | 5.927 | 9 | 0.000 | 0.442 |
| Pair 18 | LR_S1–LR_S4 | 4.80100 | 2.03101 | 0.64226 | 3.34810 | 6.25390 | 7.475 | 9 | 0.000 | 1.686 |
| Independent Samples Test | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Levene’s Test for Equality of Variances | t-Test for Equality of Means | ||||||||||
| F | Sig. | t | df | Sig. (2-Tailed) | Mean Diff. | Std. Err. Diff. | 95% Conf. Interval of the Difference | ||||
| Lower | Upper | Effect Size | |||||||||
| DSP GJL Week 1–4 | Eq. var. assum. | 4.531 | 0.047 | 3.022 | 18 | 0.007 | 2.93600 | 0.97154 | 0.89488 | 4.97712 | 0.95564 |
| Eq. var. not as. | 3.022 | 14.514 | 0.009 | 2.93600 | 0.97154 | 0.85916 | 5.01284 | 0.95564 | |||
| DSP GJR Week 1–4 | Eq. var. assum. | 3.458 | 0.079 | 2.444 | 18 | 0.025 | 2.85100 | 1.16635 | 0.40058 | 5.30142 | 0.772861 |
| Eq. var. not as. | 2.444 | 13.827 | 0.029 | 2.85100 | 1.16635 | 0.34649 | 5.35551 | 0.772861 | |||
| DSP S Week 1–4 | Eq. var. assum. | 0.439 | 0.516 | 2.232 | 18 | 0.039 | 2.43900 | 1.09288 | 0.14295 | 4.73505 | 0.70582 |
| Eq. var. not as. | 2.232 | 14.679 | 0.042 | 2.43900 | 1.09288 | 0.10513 | 4.77287 | 0.70582 | |||
| LR GJL Week 1–4 | Eq. var. assum. | 1.741 | 0.204 | 7.211 | 18 | 0.000 | 3.61400 | 0.50118 | 2.56106 | 4.66694 | 2.280318 |
| Eq. var. not as. | 7.211 | 15.317 | 0.000 | 3.61400 | 0.50118 | 2.54768 | 4.68032 | 2.280318 | |||
| LR GJR Week 1–4 | Eq. var. assum. | 5.064 | 0.037 | 6.645 | 18 | 0.000 | 3.71900 | 0.55968 | 2.54316 | 4.89484 | 2.101334 |
| Eq. var. not as. | 6.645 | 12.178 | 0.000 | 3.71900 | 0.55968 | 2.50154 | 4.93646 | 2.101334 | |||
| LR S Week 1–4 | Eq. var. assum. | 3.168 | 0.092 | 3.771 | 18 | 0.001 | 4.80100 | 1.27326 | 2.12598 | 7.47602 | 1.192495 |
| Eq. var. not as. | 3.771 | 13.899 | 0.002 | 4.80100 | 1.27326 | 2.06826 | 7.53374 | 1.192495 | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Örücü, S.; Selek, M. Design and Validation of Rule-Based Expert System by Using Kinect V2 for Real-Time Athlete Support. Appl. Sci. 2020, 10, 611. https://doi.org/10.3390/app10020611
Örücü S, Selek M. Design and Validation of Rule-Based Expert System by Using Kinect V2 for Real-Time Athlete Support. Applied Sciences. 2020; 10(2):611. https://doi.org/10.3390/app10020611
Chicago/Turabian StyleÖrücü, Serkan, and Murat Selek. 2020. "Design and Validation of Rule-Based Expert System by Using Kinect V2 for Real-Time Athlete Support" Applied Sciences 10, no. 2: 611. https://doi.org/10.3390/app10020611
APA StyleÖrücü, S., & Selek, M. (2020). Design and Validation of Rule-Based Expert System by Using Kinect V2 for Real-Time Athlete Support. Applied Sciences, 10(2), 611. https://doi.org/10.3390/app10020611