Using Long-Range Wireless Sensor Network to Track the Illegal Cutting Log


Abstract
1. Introduction
2. Research Methodology and Proposed System
2.1. Research Methodology
2.2. State-of-the-Art Research in Illegal Logging
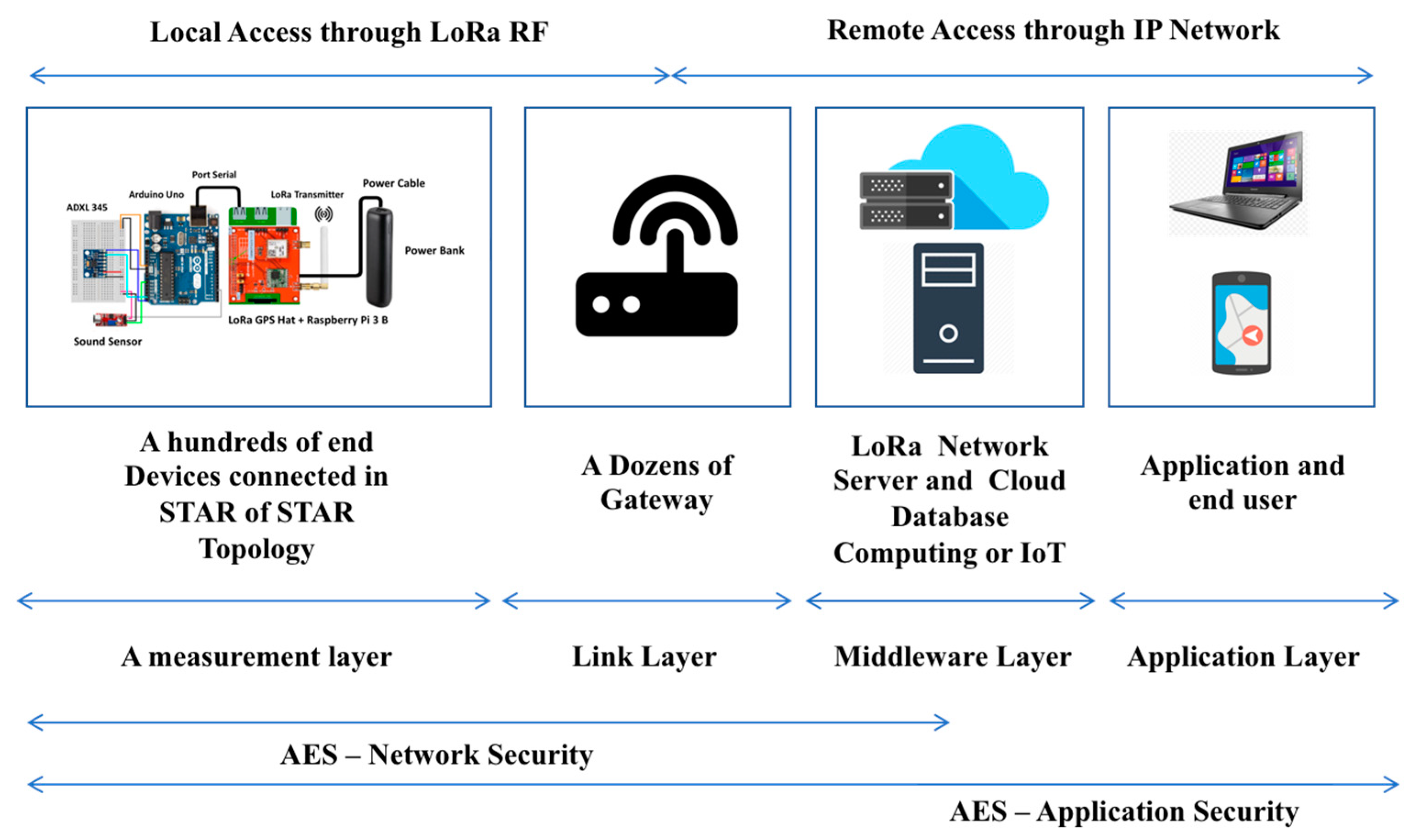
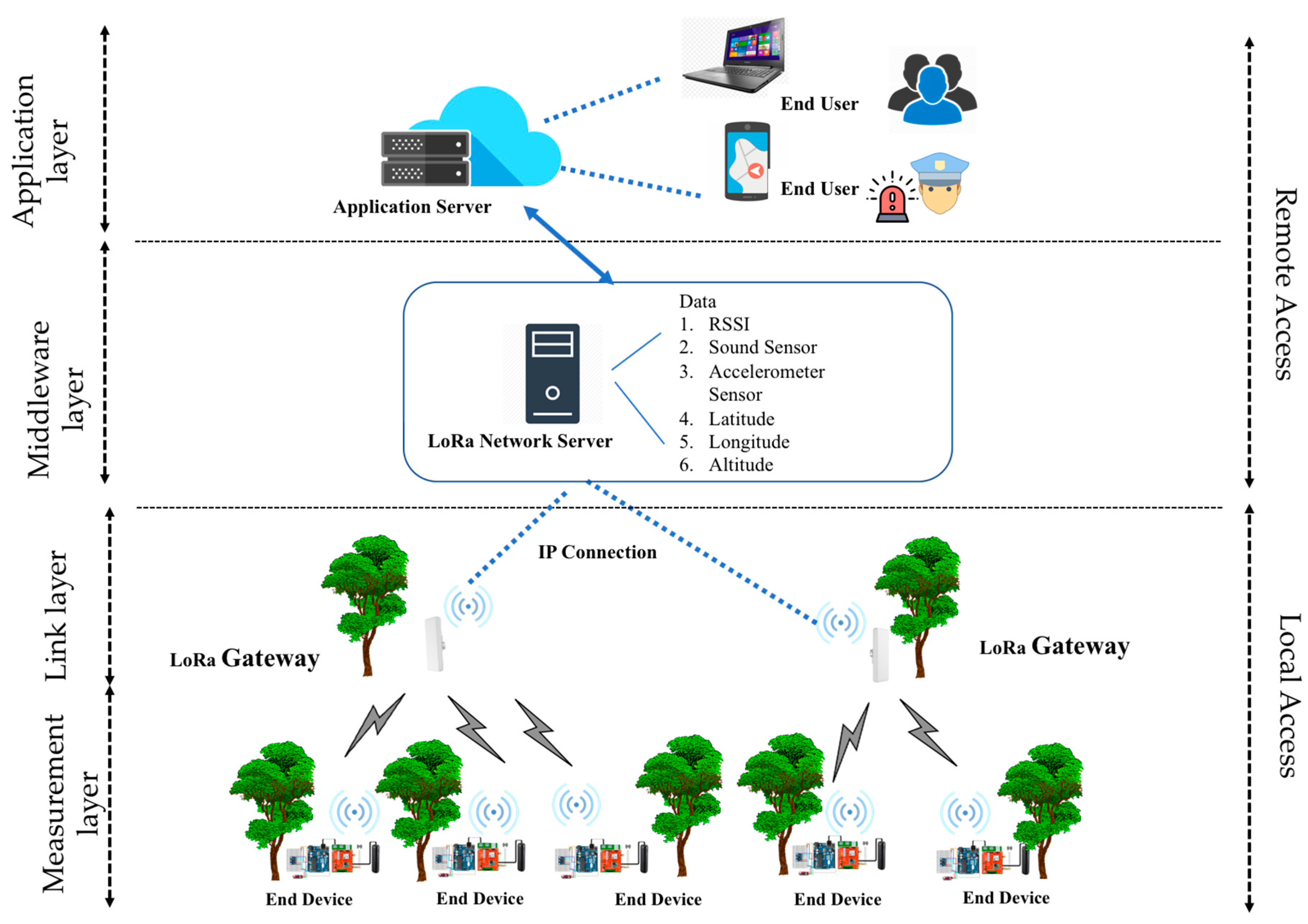
2.3. Proposed System
2.3.1. Local Access Network
2.3.2. Remote Access Network
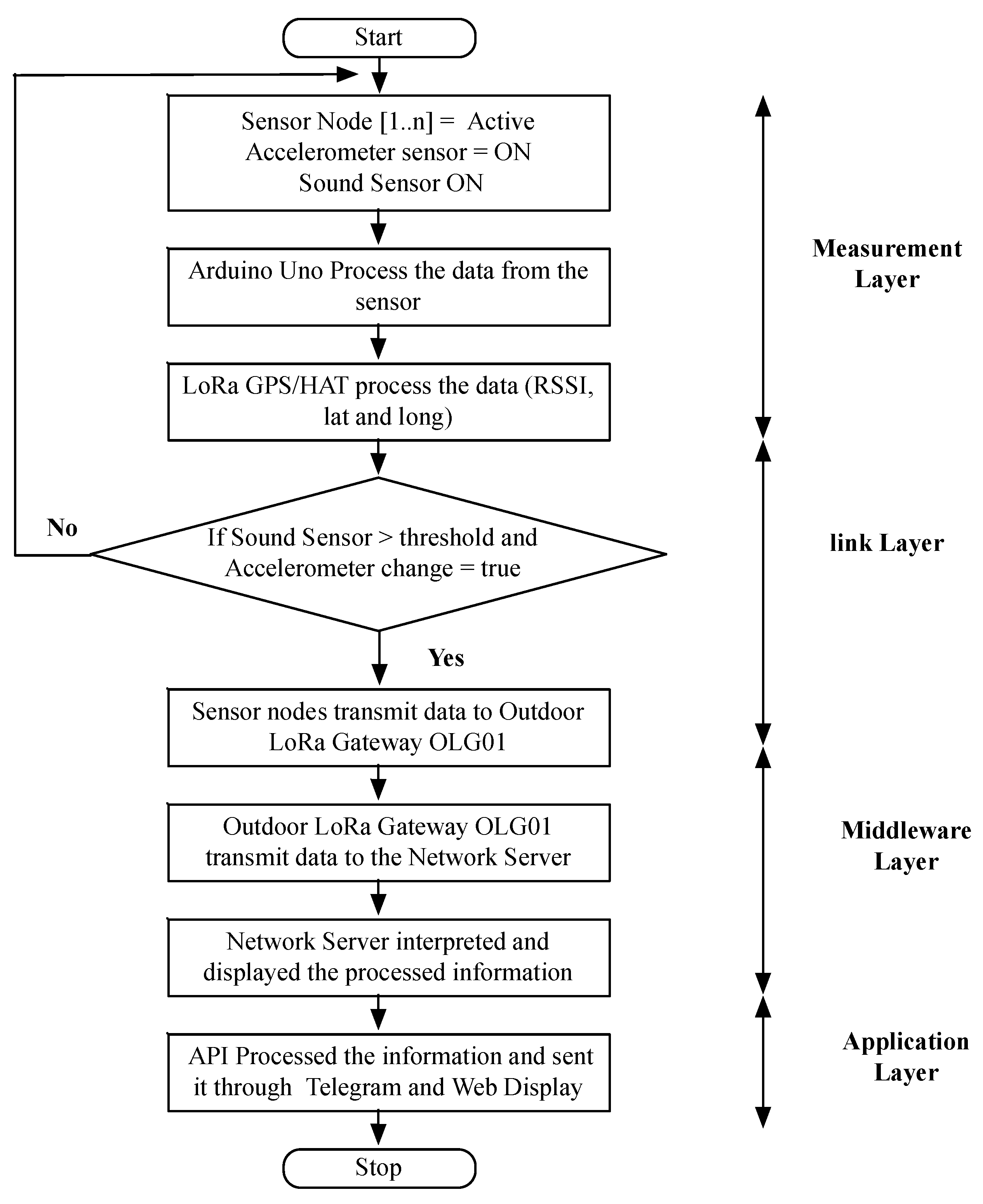
2.4. Flowchart of Proposed System
2.5. Long-Range (LoRa) Configuration
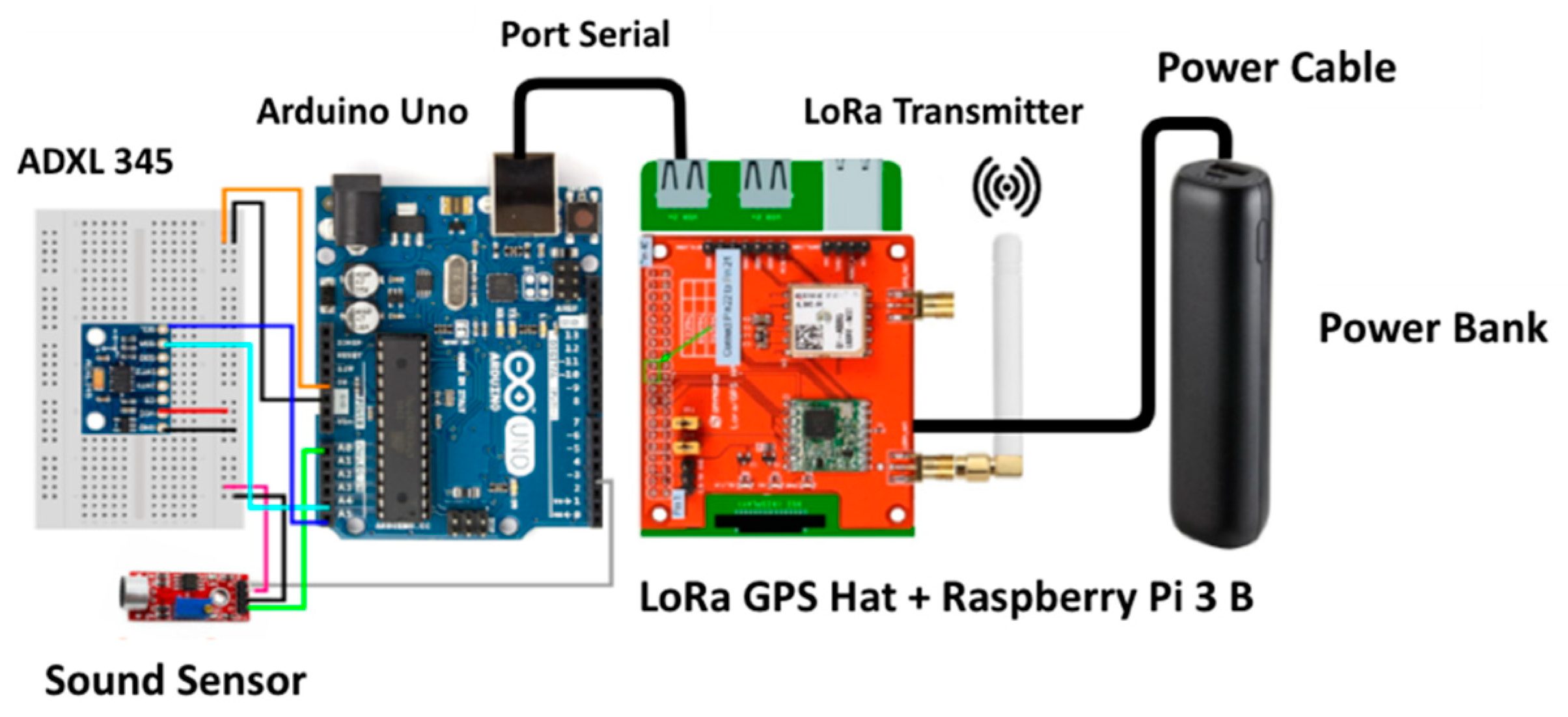
2.6. The Prototype of The Proposed System
3. Result and Discussion
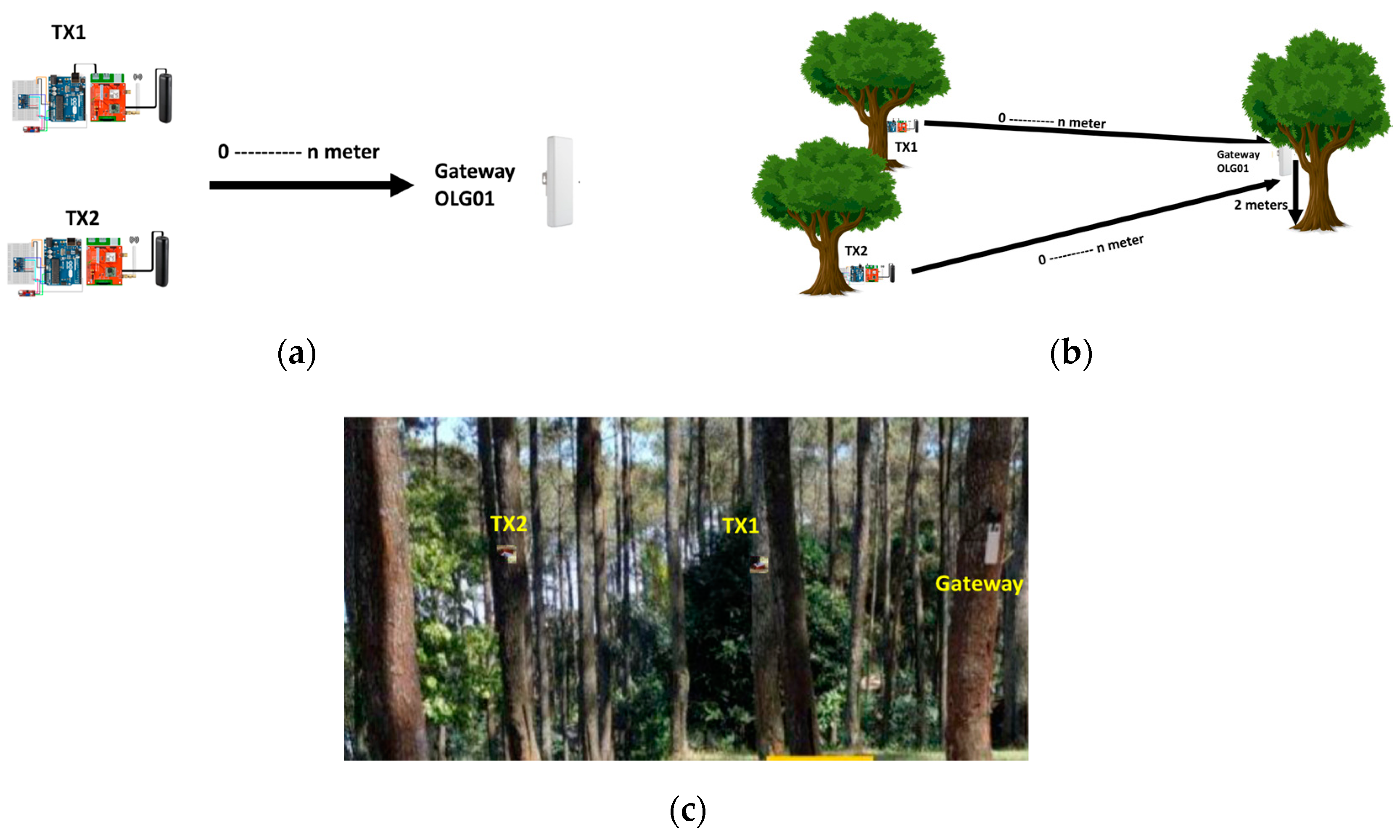
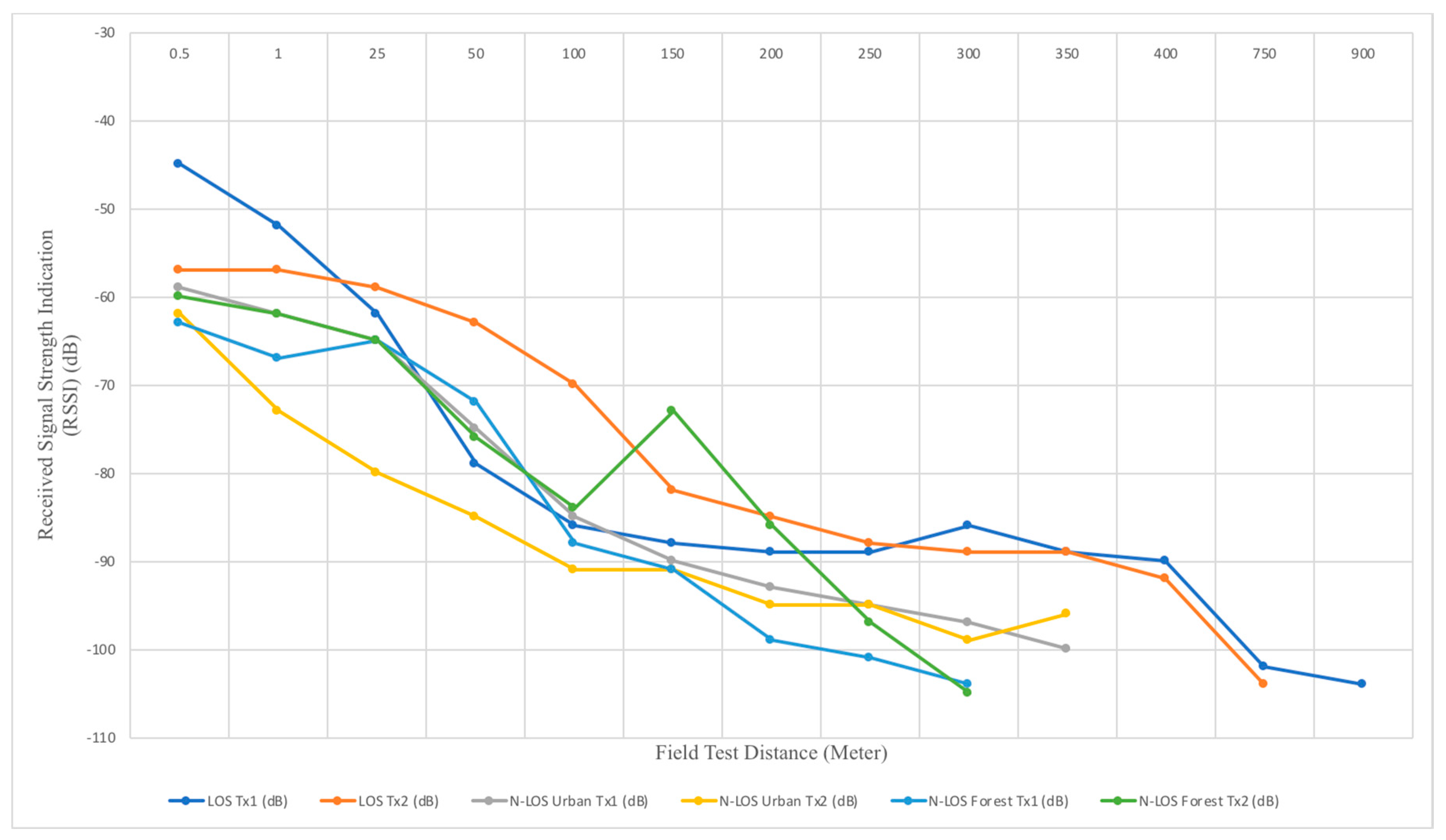
3.1. LoRa Performance based on Range-Distance RSSI
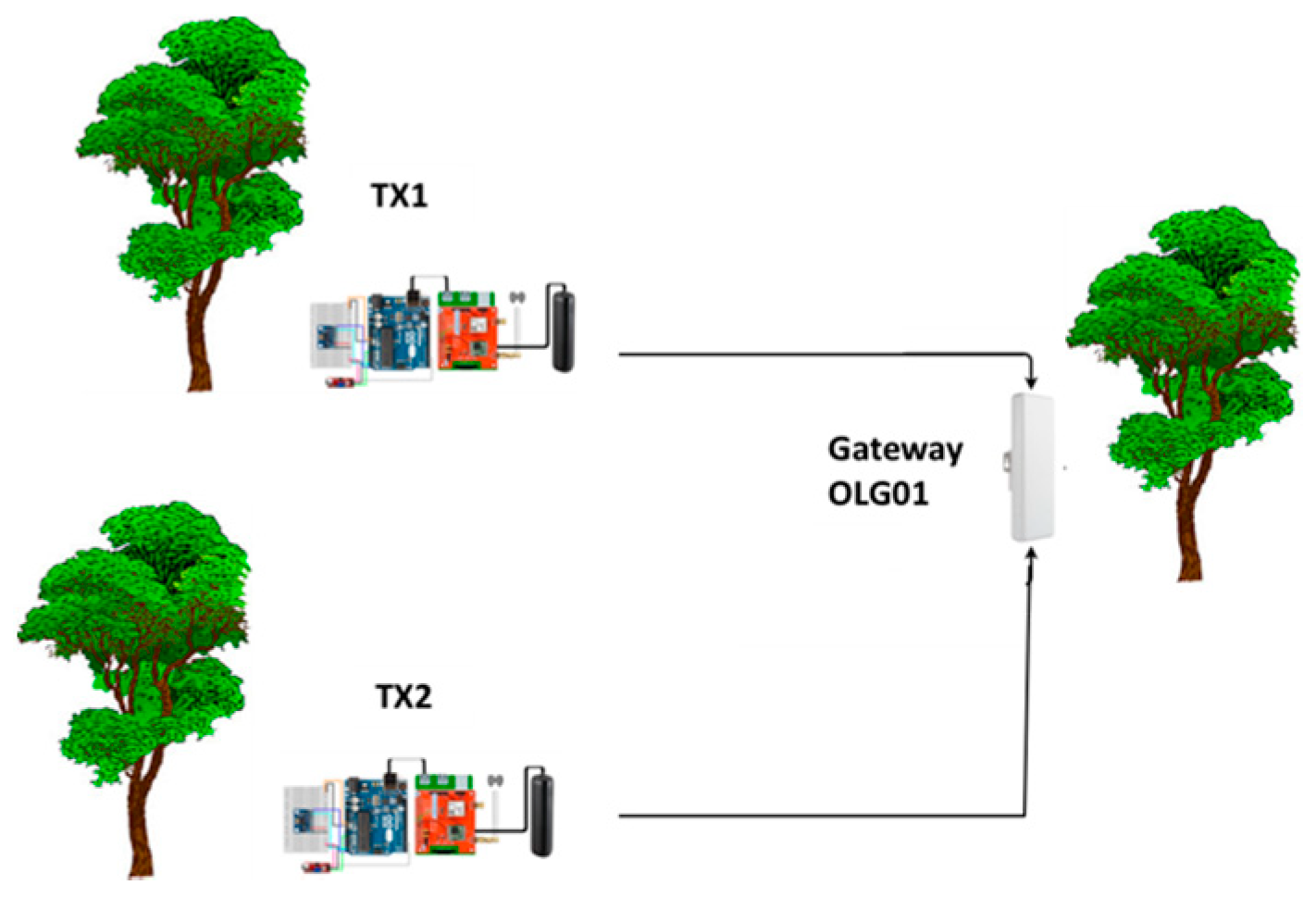
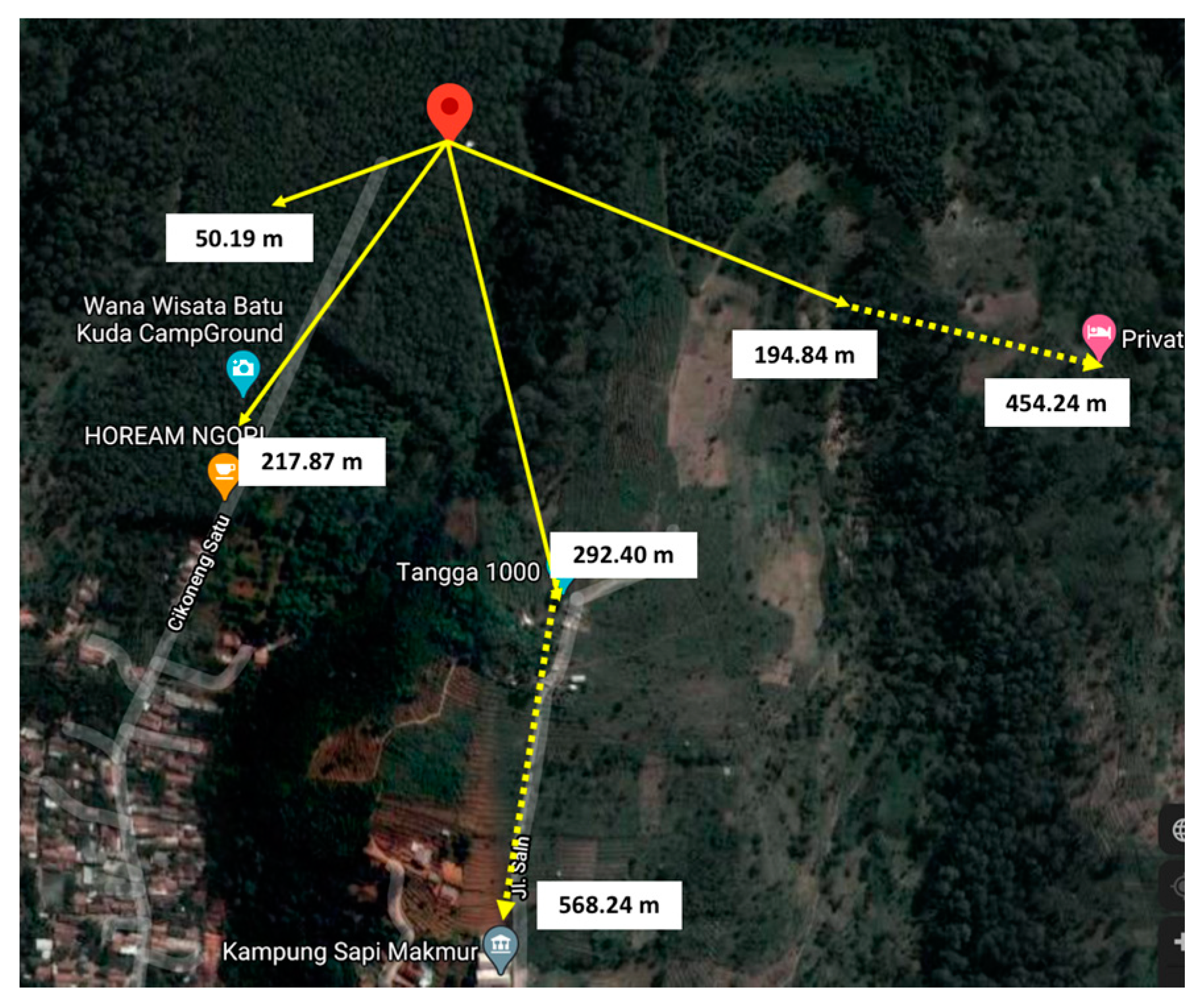
3.2. LoRa Tracking Performance
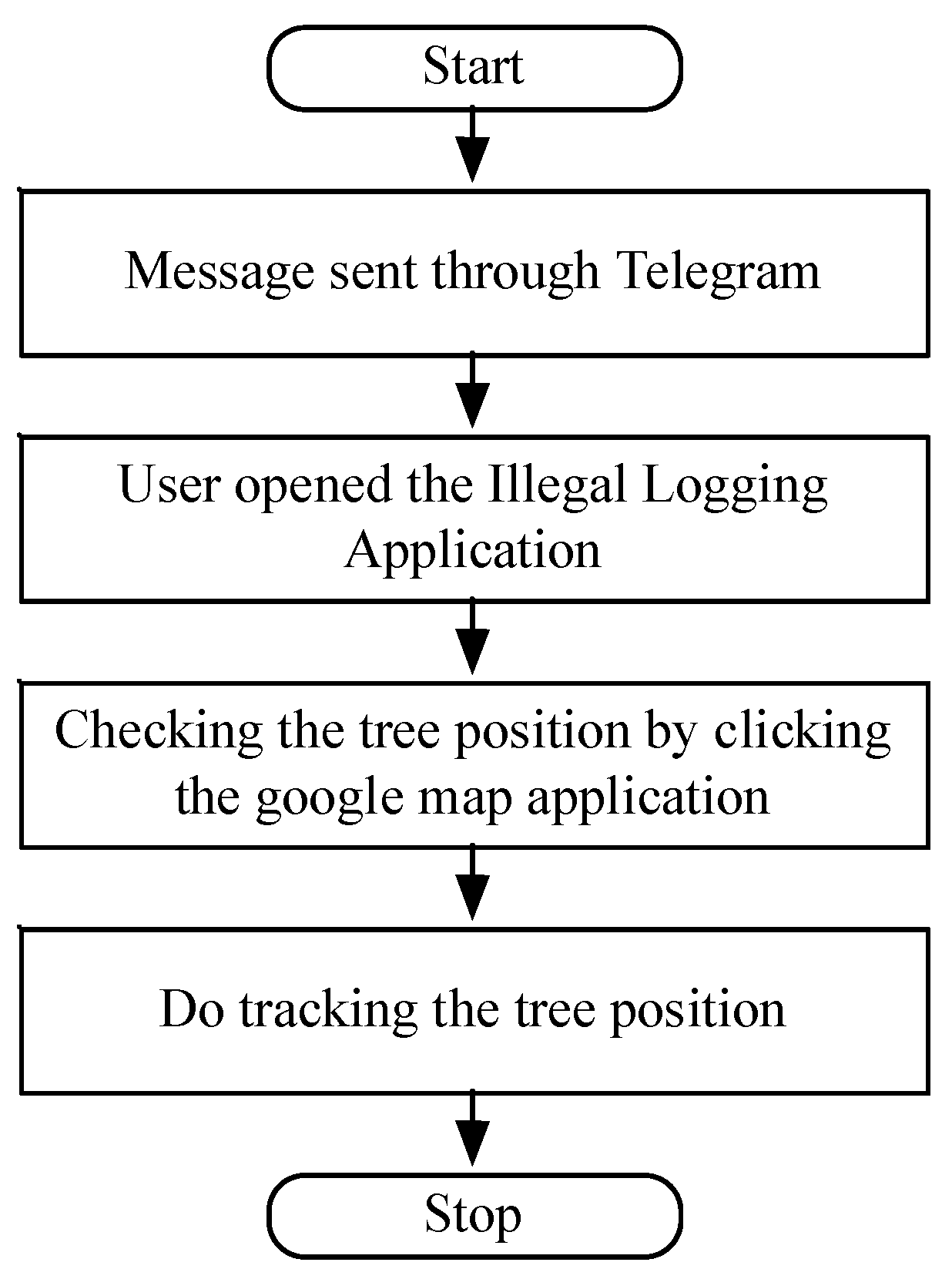
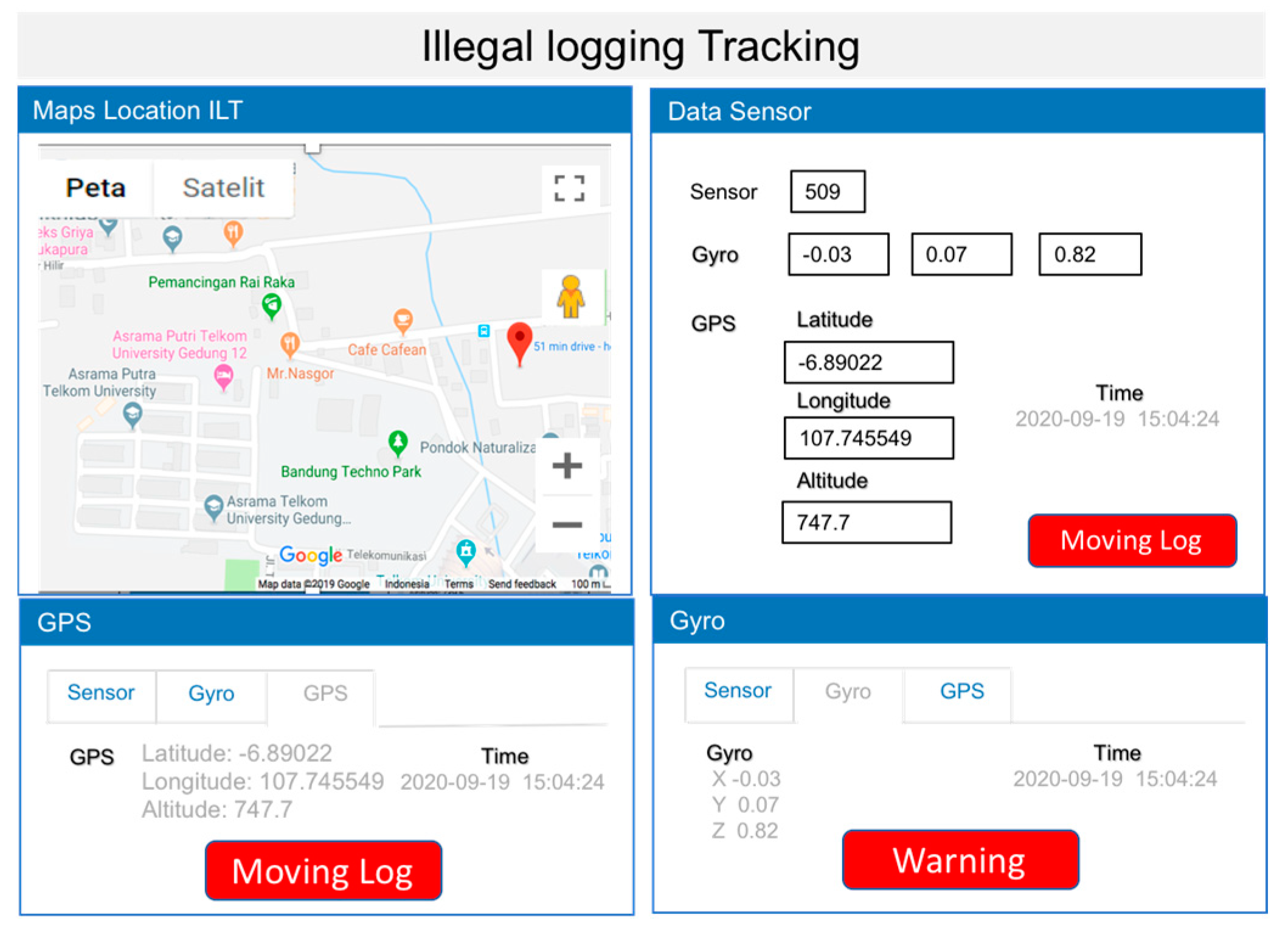
3.3. Illegal Logging Application
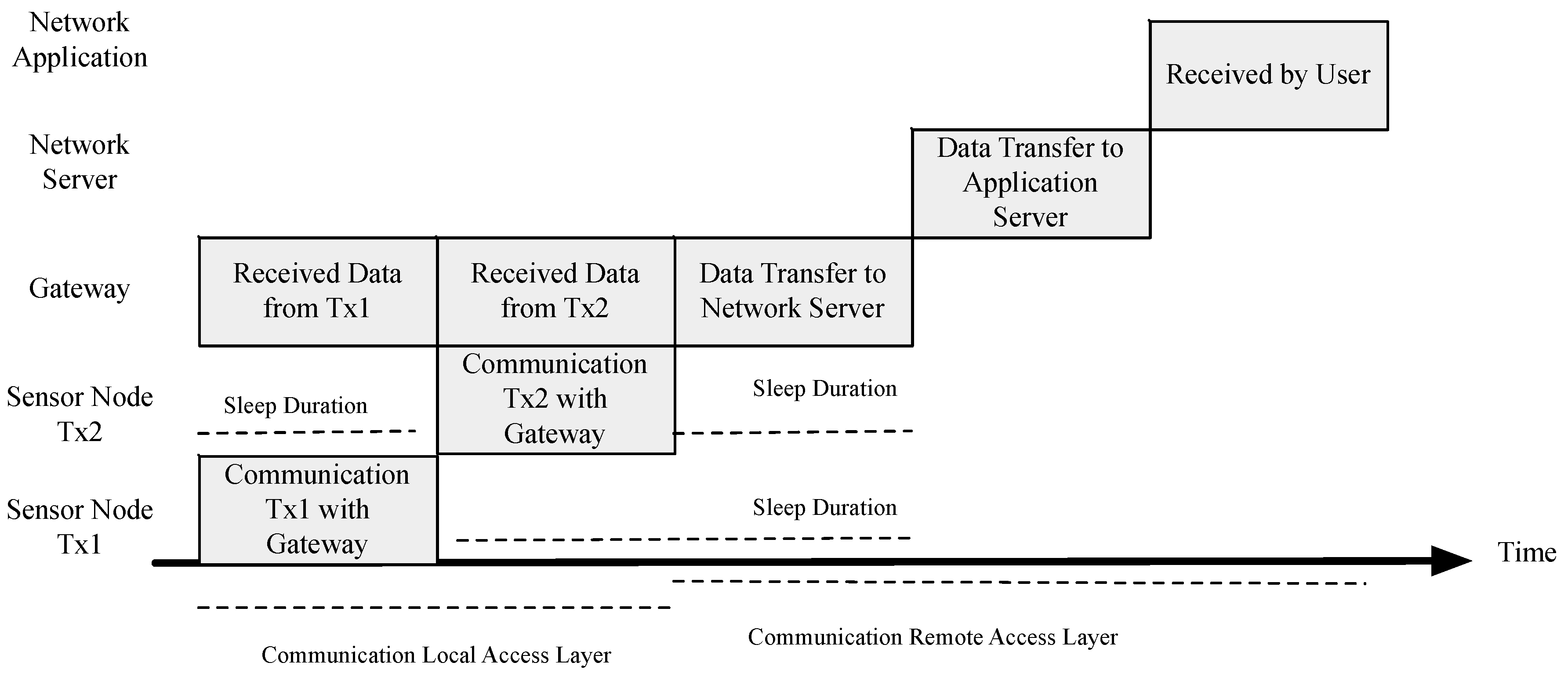
3.4. Energy Consumption
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Miettinen, J.; Stibig, H.-J.; Achard, F. Remote sensing of forest degradation in Southeast Asia—Aiming for a regional view through 5–30 m satellite data. Glob. Ecol. Conserv. 2014, 2, 24–36. [Google Scholar] [CrossRef]
- Okia, C.A. Deforestation: Causes, Effects and Control. Strategies. In Global Perspectives on Sustainable Forest Management; Okia, C.A., Ed.; InTech: Rijeka, Croatia, 2012. [Google Scholar]
- Saunders, J. Illegal Logging and Related Trade the Response in Lao PDR. A Chatham House Assessment; Chatham House: London, UK, 2014. [Google Scholar]
- Tzoulis, I.K.; Andreopoulou, Z.S.; Voulgaridis, E. Wood Tracking Information Systems to Confront Illegal Logging. J. Agric. Informatics 2014, 5, 9–17. [Google Scholar] [CrossRef]
- Mutiara, G.A.; Suryana, N.; Mohd, O.B. Wireless sensor network for illegal logging application: A systematic literature review. J. Theor. Appl. Inf. Technol. 2019, 97, 302–313. [Google Scholar]
- Jang, I.; Pyeon, D.; Kim, S.; Yoon, H. A Survey on Communication Protocols for Wireless Sensor Networks. J. Comput. Sci. Eng. 2013, 7, 231–241. [Google Scholar] [CrossRef]
- Dargie, W.; Poellabauer, C. Fundamentals of Wireless Sensor Networks: Theory and Practice; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2010; Volume 136. [Google Scholar]
- Shaikh, M.R.S. A Review Paper on Electricity Generation from Solar Energy. Int. J. Res. Appl. Sci. Eng. Technol. 2017, V, 1884–1889. [Google Scholar] [CrossRef]
- Luvisotto, M.; Tramarin, F.; Vangelista, L.; Vitturi, S. On the Use of LoRaWAN for Indoor Industrial IoT Applications. Wirel. Commun. Mob. Comput. 2018, 2018, 1–11. [Google Scholar] [CrossRef]
- Buratti, C.; Conti, A.; Dardari, D.; Verdone, R. An Overview on Wireless Sensor Networks Technology and Evolution. Sensors 2009, 9, 6869–6896. [Google Scholar] [CrossRef]
- Mutiara, G.A.; Suryana, N.; Mohd, O. WSN nodes power consumption using multihop routing protocol for illegal cutting forest. TELKOMNIKA (Telecommun. Comput. Electron. Control.) 2020, 18, 1529–1537. [Google Scholar] [CrossRef]
- Mutiara, E.A. Smart cane with location detection using RF module. Int. J. Adv. Appl. Sci. 2018, 5, 65–70. [Google Scholar] [CrossRef]
- Mutiara, G.A.; Hapsari, G.I.; Pratondo, A. Estimote-Based Location Awareness on Mobile Devices for Visually Impaired. J. Theor. Appl. Inf. Technol. 2019, 96, 215–226. [Google Scholar]
- Erturk, M.A.; Aydın, M.A.; Büyükakkaşlar, M.T.; Evirgen, H. A Survey on LoRaWAN Architecture, Protocol and Technologies. Futur. Internet 2019, 11, 216. [Google Scholar] [CrossRef]
- Devi, P.; Istianti, D.; Prawiro, S.Y.; Bogi, N.; Karna, A.; Nursafa, I.A. Analisis Performansi Teknologi Akses LPWAN LoRa Antares Untuk Komunikasi Data End Node. In Proceedings of the CITEE 2019, Yogyakarta, Indonesia, 24–25 July 2019; pp. 24–25. [Google Scholar]
- Craig Alan Repec. Regulatory Status for Using RFID in the EPC Gen2 (860 to 960 MHz) Band of the UHF Spectrum; GS1: Brussel, Belgium, 2019. [Google Scholar]
- Raza, U.; Kulkarni, P.; Sooriyabandara, M. Low Power Wide Area Networks: An Overview. IEEE Commun. Surv. Tutor. 2017, 19, 855–873. [Google Scholar] [CrossRef]
- Fargas, B.C.; Petersen, M.N. GPS-Free Geolocation Using LoRa in Low-Power WANs; Global Internet of Things Summit, Proceedings; Institute of Electrical and Electronics Engineers (IEEE): Geneva, Switzerland, 2017; pp. 1–6. [Google Scholar]
- Usmonov, M.; Gregoretti, F. Design and implementation of a LoRa based wireless control for drip irrigation systems. In Proceedings of the 2017 2nd International Conference on Robotics and Automation Engineering, ICRAE 2017, Shanghai, China, 29–31 December 2017; pp. 248–253. [Google Scholar]
- Vu, V.A. Design of automatic irrigation system for greenhouse based on LoRa technology. In Proceedings of the 2018 International Conference on Advanced Technologies for Communications (ATC), Ho Chi Minh City, Vietnam, 18–20 October 2018; pp. 72–77. [Google Scholar]
- Nisa, N.A.B.; Priyadharshini, K.; Priyadharshini, K.; Devi, R.N. Agriculture Irrigation Water Demand Forecasting Using LORA Technology. Int. Res. J. Eng. Technol. 2019, 6, 3050–3052. [Google Scholar]
- Kodali, R.K.; Borra, K.Y.; Sai, G.N.S.; Domma, H.J. An IoT Based Smart Parking System Using LoRa. In Proceedings of the 2018 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery, CyberC, Zhengzhou, China, 18–20 October 2018; pp. 151–154. [Google Scholar]
- Alkhatib, A.A.A. Wireless Sensor Network for Forest Fire Detection and Decision Making. Int. J. Adv. Eng. Sci. Technol. 2013, 2, 299–309. [Google Scholar]
- Picó, A.M.; Cuesta-Frau, D.; Araujo, A.; Alejandre, J.; Rozas, A. Forest Monitoring and Wildland Early Fire Detection by a Hierarchical Wireless Sensor Network. J. Sens. 2016, 2016, 1–8. [Google Scholar] [CrossRef]
- Baharudin, A.M.; Yan, W. Long-range wireless sensor networks for geo-location tracking: Design and evaluation. In Proceedings of the 2016 International Electronics Symposium (IES), Denpasar, Indonesia, 29–30 September 2016; pp. 76–80. [Google Scholar] [CrossRef]
- Queralta, J.P.; Gia, T.N.; Tenhunen, H.; Westerlund, T. Edge-AI in LoRa-based Health Monitoring: Fall Detection System with Fog Computing and LSTM Recurrent Neural Networks. In Proceedings of the 2019 42nd International Conference on Telecommunications and Signal Processing (TSP), Budapest, Hungary, 1–3 July 2019; pp. 601–604. [Google Scholar] [CrossRef]
- Hayati, N.; Suryanegara, M. The IoT LoRa system design for tracking and monitoring patient with mental disorder. In Proceedings of the 2017 IEEE International Conference on Communication, Networks and Satellite (Comnetsat), Semarang, Indonesia, 5–7 October 2017; pp. 135–139. [Google Scholar] [CrossRef]
- Mdhaffar, A.; Chaari, T.; Larbi, K.; Jmaiel, M.; Freisleben, B. IoT-based health monitoring via LoRaWAN. In Proceedings of the IEEE EUROCON 2017-17th International Conference on Smart Technologies, Ohrid, Macedonia, 6–8 July 2017; pp. 519–524. [Google Scholar] [CrossRef]
- Barro, P.A.; Zennaro, M.; Degila, J.; Pietrosemoli, E. A Smart Cities LoRaWAN Network Based on Autonomous Base Stations (BS) for Some Countries with Limited Internet Access. Futur. Internet 2019, 11, 93. [Google Scholar] [CrossRef]
- Nunamaker, J.F., Jr.; Chen, M.; Purdin, T.D. Systems Development in Information Systems Research. J. Manag. Inf. Syst. 1990, 7, 89–106. [Google Scholar] [CrossRef]
- Ghulam, A. Monitoring Tropical Forest Degradation in Betampona Nature Reserve, Madagascar Using Multisource Remote Sensing Data Fusion. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2014, 7, 4960–4971. [Google Scholar] [CrossRef]
- Grecchi, R.C.; Beuchle, R.; Shimabukuro, Y.E.; Aragão, L.E.; Arai, E.; Simonetti, D.; Achard, F. An integrated remote sensing and GIS approach for monitoring areas affected by selective logging: A case study in northern Mato Grosso, Brazilian Amazon. Int. J. Appl. Earth Obs. Geoinform. ITC J. 2017, 61, 70–80. [Google Scholar] [CrossRef]
- Kalhara, P.G.; Jayasinghearachchd, V.D.; Dias, A.H.A.T.; Ratnayake, V.C.; Jayawardena, C.; Kuruwitaarachchi, N. TreeSpirit: Illegal logging detection and alerting system using audio identification over an IoT network. In Proceedings of the 2017 11th International Conference on Software, Knowledge, Information Management and Applications (SKIMA), Malabe, Sri Lanka, 6–8 December 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Hema, L.K.; Murugan, D.; Priya, R.M. Wireless sensor network based conservation of illegal logging of forest trees. In Proceedings of the 2014 IEEE National Conference on Emerging Trends In New & Renewable Energy Sources And Energy Management (NCET NRES EM), Malabe, Sri Lanka, 6–8 December 2014; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2014; pp. 130–134. [Google Scholar]
- Chen, Y.-Y.; Liaw, J.-J. A novel real-time monitoring system for illegal logging events based on vibration and audio. In Proceedings of the 2017 IEEE 8th International Conference on Awareness Science and Technology (iCAST), Taichung, Taiwan, 8–10 November 2017; pp. 470–474. [Google Scholar] [CrossRef]
- Kocharoen, P.; Nuanloy, S.; Nantivatana, P. Designing Wireless Sensor Network for Detecting Chainsaw Noise in a Forested Watershed. In Proceedings of the 30th International Technical Conference on Circuits/Systems, Computers and Communications, Seoul, Korea, 30 June–3 July 2015; pp. 1–4. [Google Scholar]
- Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Jawad, A.M.; Ismail, M. Energy-Efficient Wireless Sensor Networks for Precision Agriculture: A Review. Sensors 2017, 17, 1781. [Google Scholar] [CrossRef]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W.M. A study of Lora: Long range & low power networks for the internet of things. Sensors 2016, 16, 1–18. [Google Scholar]
- Mutiara, G.A.; Suryana, N.; Mohd, O. Multiple sensor on clustering wireless sensor network to tackle illegal cutting. Int. J. Adv. Sci. Eng. Inf. Technol. 2020, 10, 164–170. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LoRaWAN | ZigBee | |
|---|---|---|
| Standards | LoRa Alliance | IEEE 802.15.4 |
| Modulation | CSS | DSSS, QPSK |
| Frequencies | ISM:433 MHz, 868 MHz, 915 MHz | ISM: 868 MHz, 2.4 GHz |
| Coverage | 1–10 Km | 10–100 m |
| Bandwidth | 125 kHz, 250kHz | 2 MHz |
| Tx Limit | Duty Cycle Lim | Unlimited |
| Network Size | 10,000 per BS | 65,000 per BS |
| Max Date Rate | 50kbps | 250kbps at 2.4 GHz |
| Network Topologies | STAR of STAR | P2P, Tree, STAR, Mesh |
| Private | Yes | Yes |
| Energy Consumption | Low | Low |
| Security | High | High |
| Cost | Low | Low |
| Gateway Position | Sensor Node | GPS New Location | Direction Degree | Range (Meter) | Processing Time (s) |
|---|---|---|---|---|---|
| Latitude −6.96966 Longitude 107.632 | TX1 | Lat −6.964497 Long 107.625225 | 135° | 901.13 | 5 |
| TX2 | Lat −6.967792 Long 107.628669 | 150° | 423.99 | 2 | |
| TX1 | Lat −6.966450 Long 107.631 | 60° | 370.89 | 2 | |
| TX2 | Lat −6.966231 Long 107.630605 | 100° | 408.64 | 2 |
| Gateway Position | Sensor Node | GPS New Location | Direction Degree | Processing Time (s) | Range (Meter) |
|---|---|---|---|---|---|
| Latitude −6.974782 Longitude 107.629622 | TX1 | Lat −6.970956 Long 107.630331 | 90° | 30 | 330.36 |
| TX2 | Lat −6.973246 Long 107.631489 | 45° | 25 | 266.37 | |
| TX1 | Lat −6.976169 Long 107.631576 | 305° | 20 | 264.20 | |
| TX2 | Lat −6.972918 Long 107.626974 | 150° | 34 | 362.28 |
| Gateway Position | Sensor Node | GPS New Location | Direction Degree | Processing Time (s) | Range (Meter) |
|---|---|---|---|---|---|
| Latitude −6.8921 Longitude 107.746 | TX1 | Lat −6.893650 Long 107.744788 | 240° | 25 | 217.87 |
| TX2 | Lat −6.892294 Long 107.745598 | 225° | 5 | 50.19 | |
| TX1 | Lat −6.897140 Long 107.746361 | 290° | 46 | 568.24 | |
| TX2 | Lat −6.893373 Long 107.749961 | 335° | 34 | 454.24 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mutiara, G.A.; Herman, N.S.; Mohd, O. Using Long-Range Wireless Sensor Network to Track the Illegal Cutting Log. Appl. Sci. 2020, 10, 6992. https://doi.org/10.3390/app10196992
Mutiara GA, Herman NS, Mohd O. Using Long-Range Wireless Sensor Network to Track the Illegal Cutting Log. Applied Sciences. 2020; 10(19):6992. https://doi.org/10.3390/app10196992
Chicago/Turabian StyleMutiara, Giva Andriana, Nanna Suryana Herman, and Othman Mohd. 2020. "Using Long-Range Wireless Sensor Network to Track the Illegal Cutting Log" Applied Sciences 10, no. 19: 6992. https://doi.org/10.3390/app10196992
APA StyleMutiara, G. A., Herman, N. S., & Mohd, O. (2020). Using Long-Range Wireless Sensor Network to Track the Illegal Cutting Log. Applied Sciences, 10(19), 6992. https://doi.org/10.3390/app10196992