A Method of Defect Depth Estimation for Simulated Infrared Thermography Data with Deep Learning



Abstract
1. Introduction
2. Thermal Consideration and FEM Stimulation
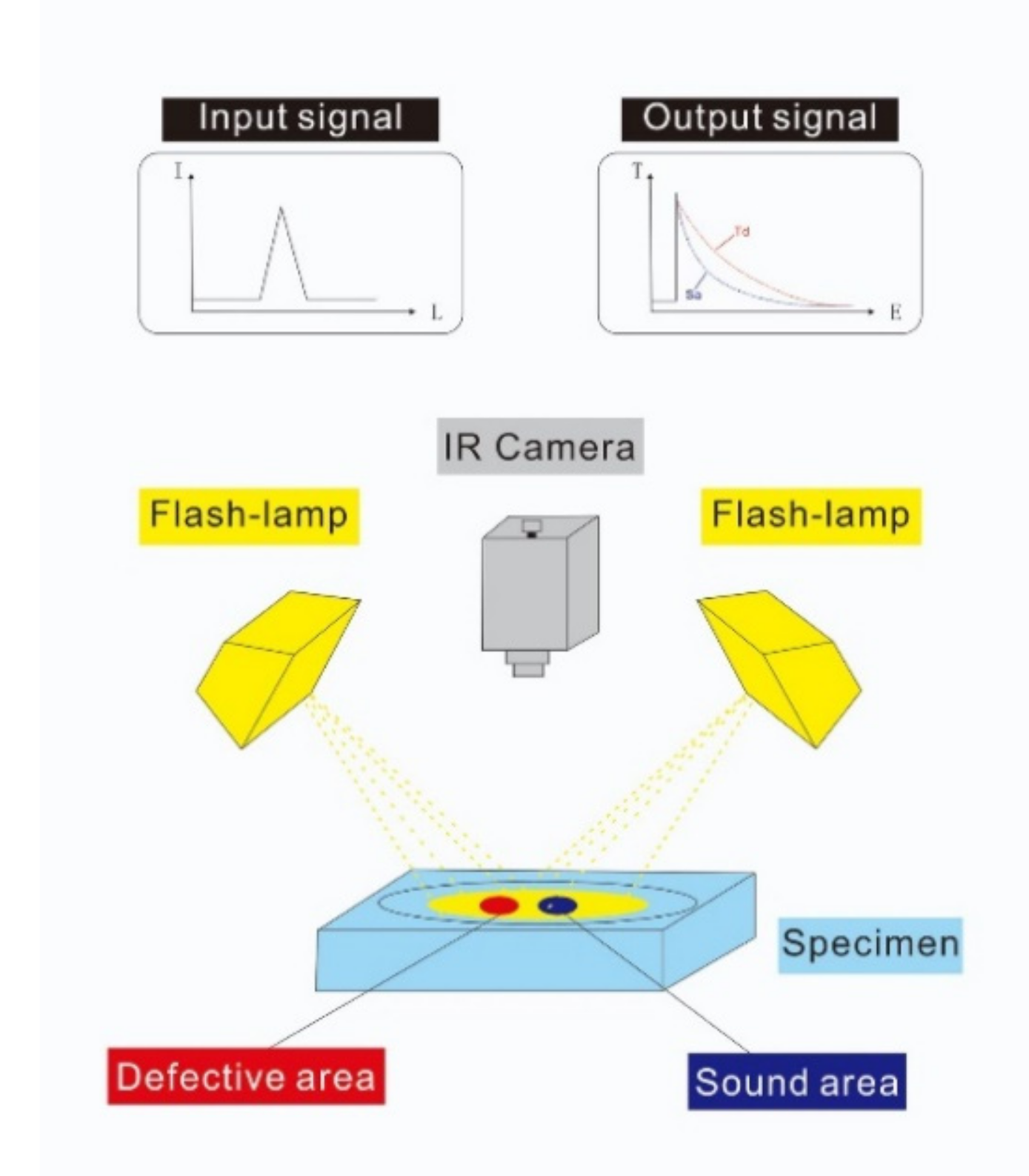
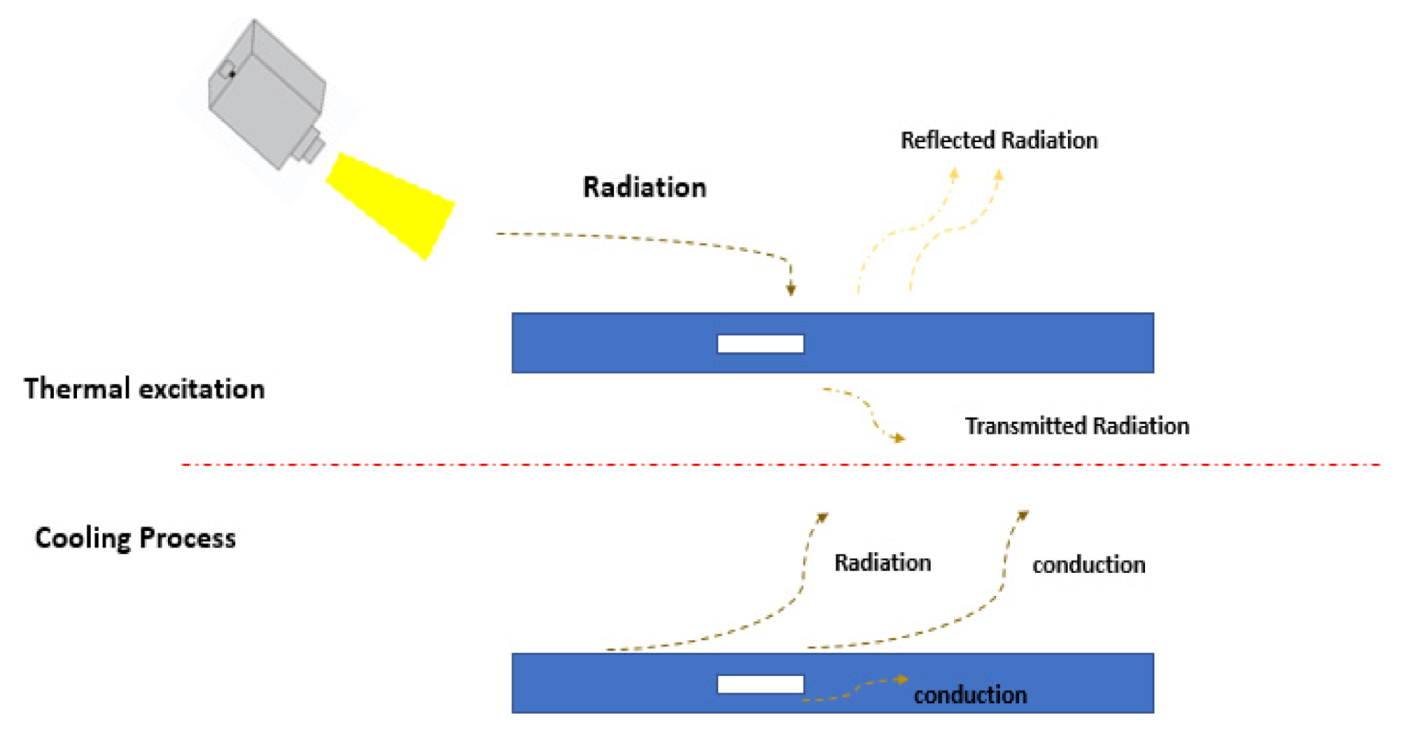
2.1. Pulsed Thermography
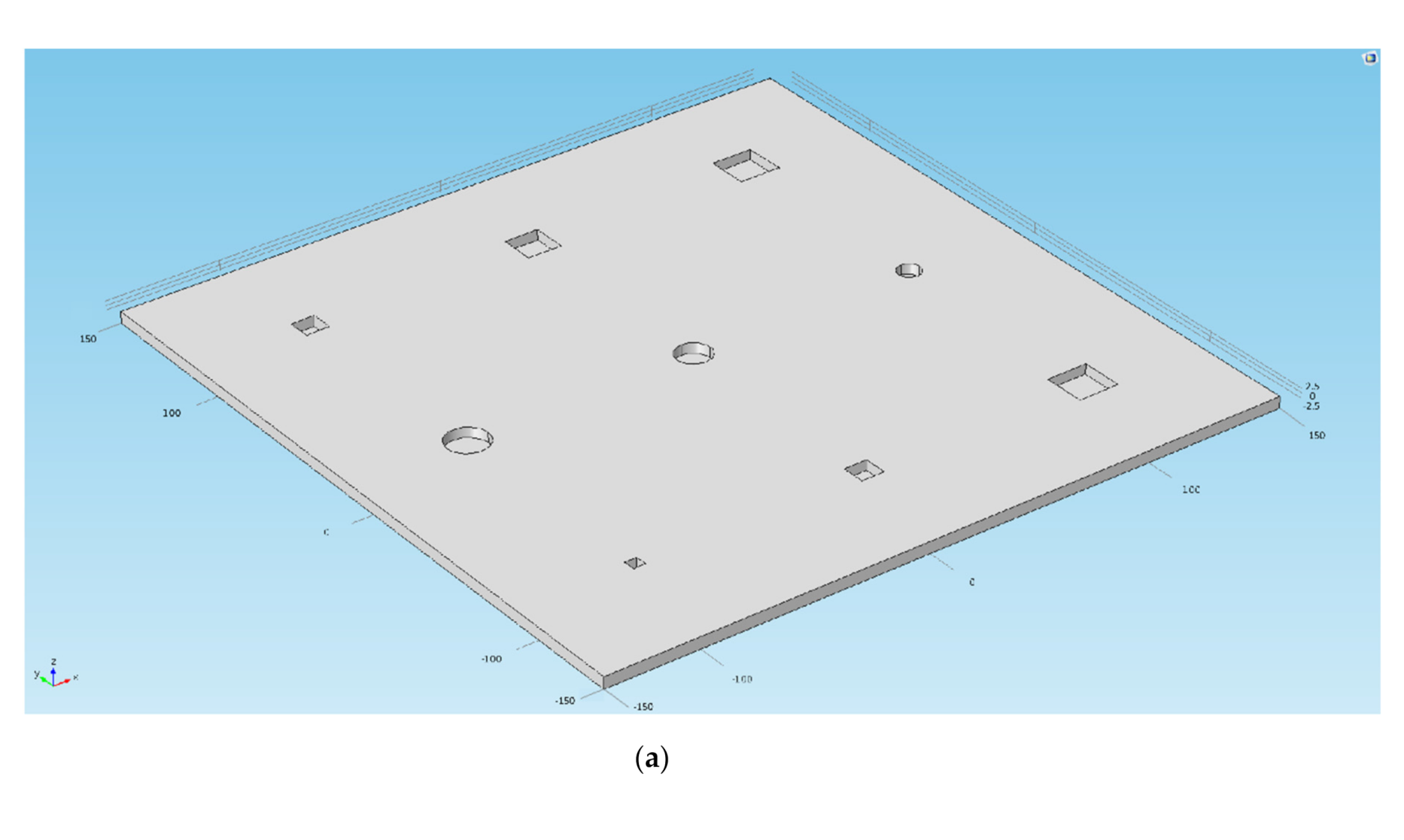
2.2. Finite Element Modeling with Transient Heat Transfer
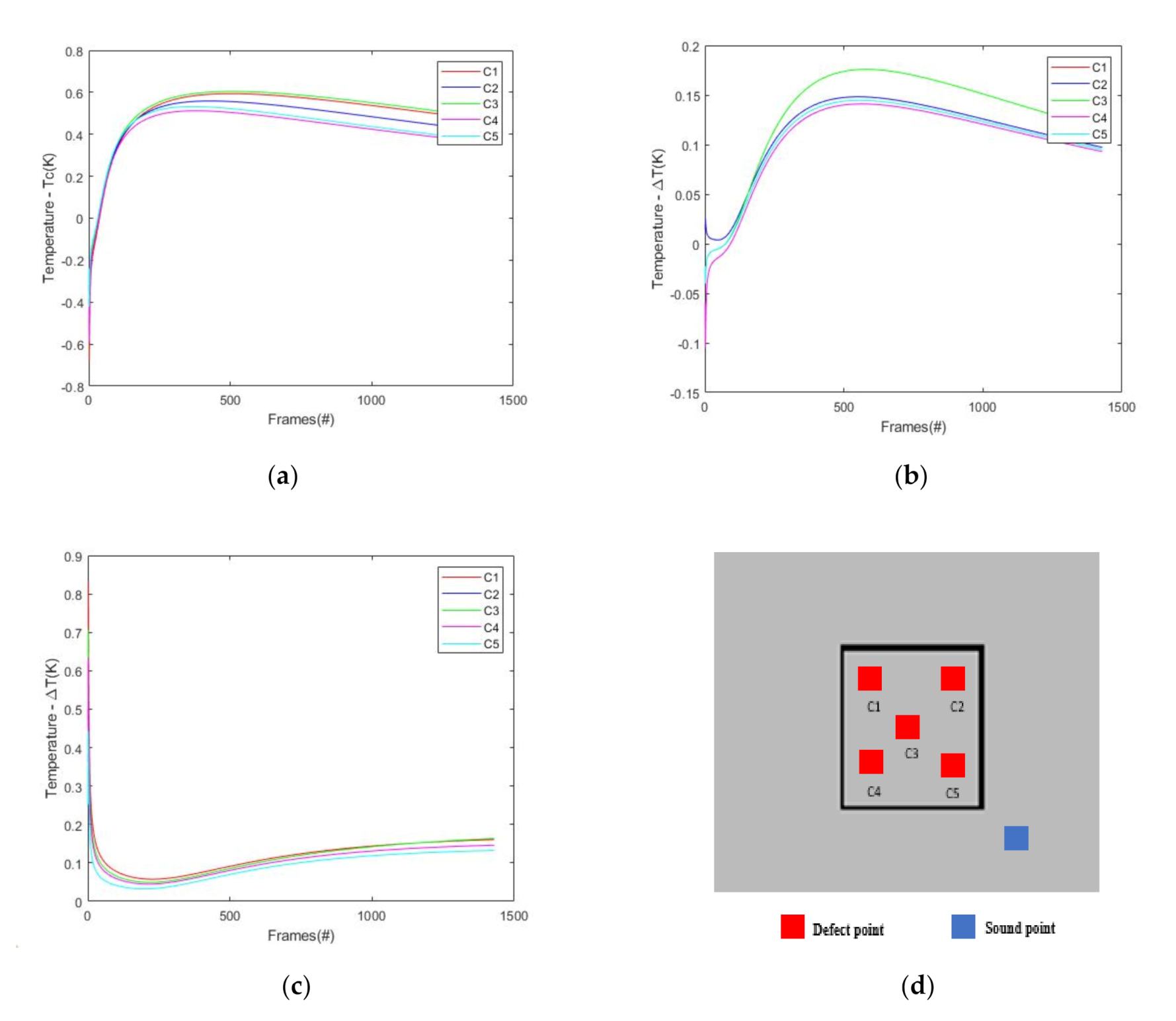
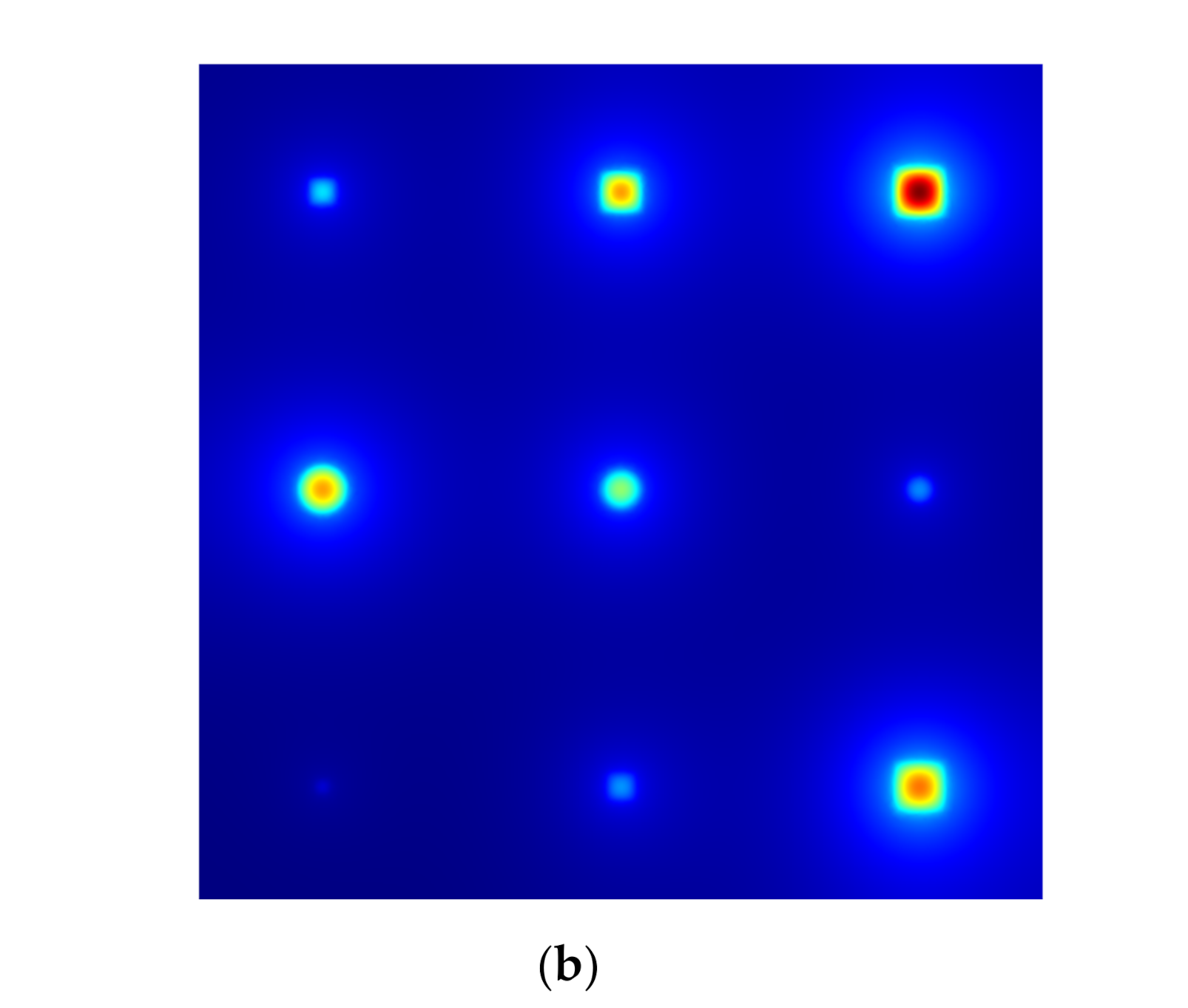
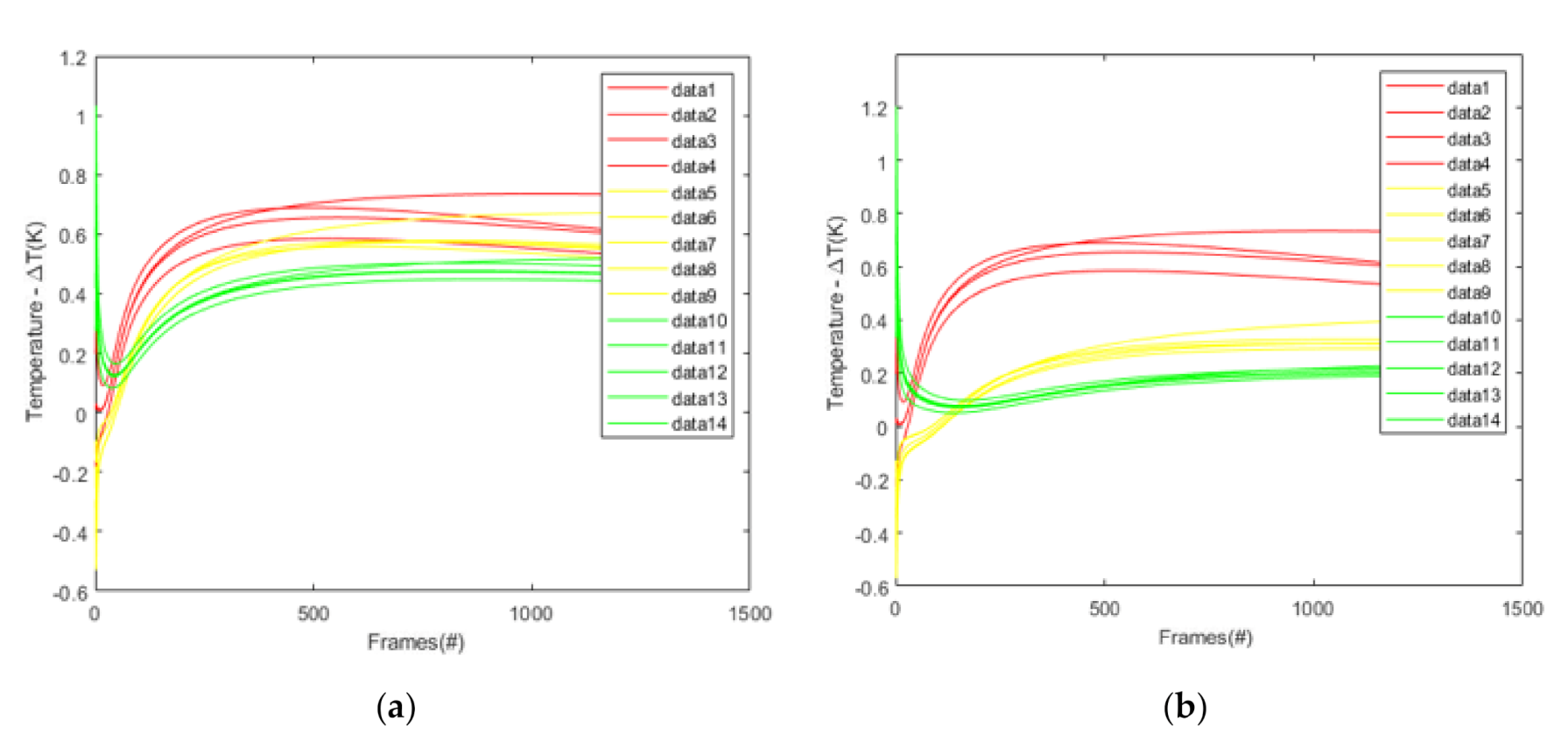
2.3. Temperature and Thermal Contrast Curves
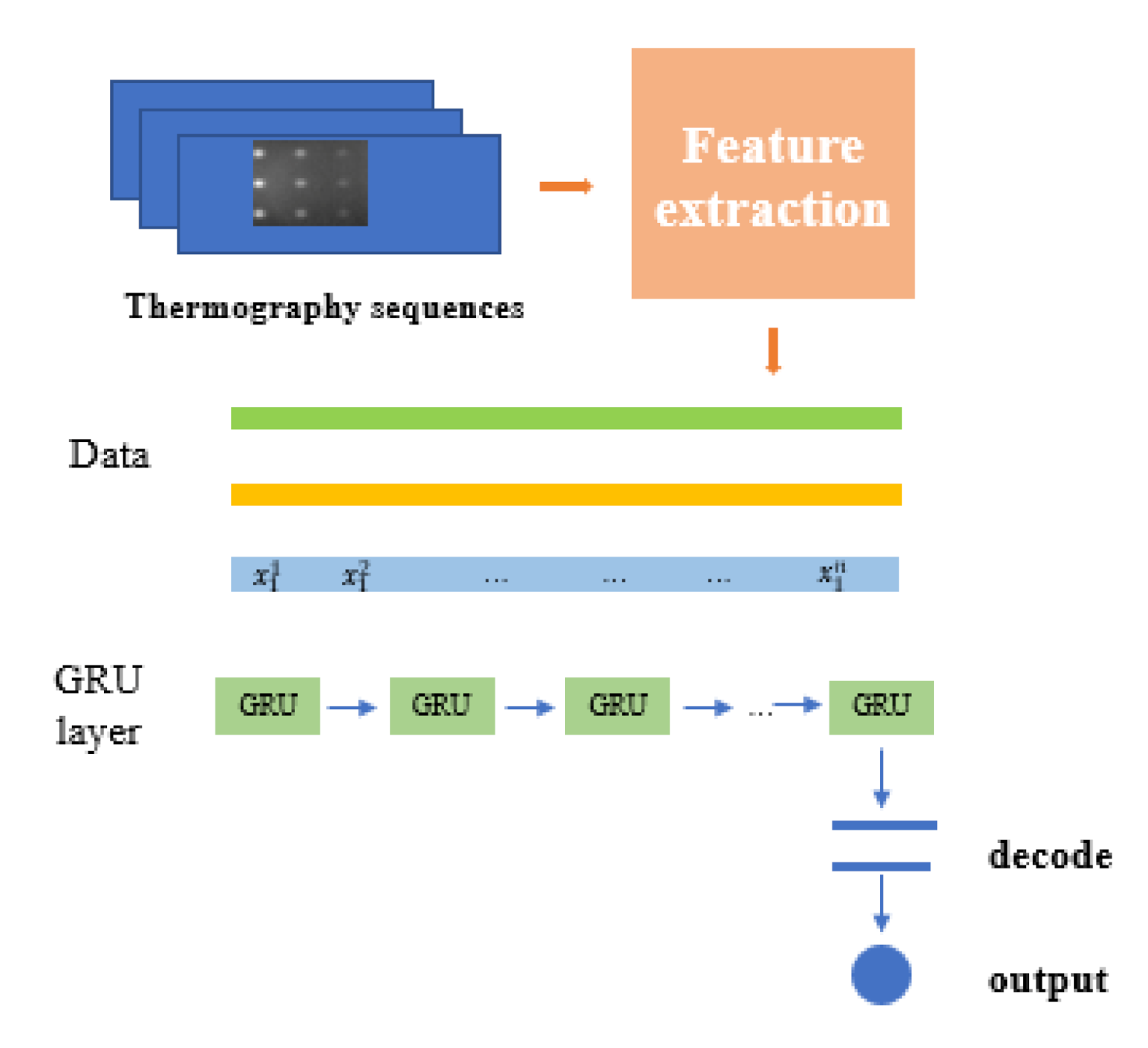
3. Proposed Strategy for Defect Depth Estimation
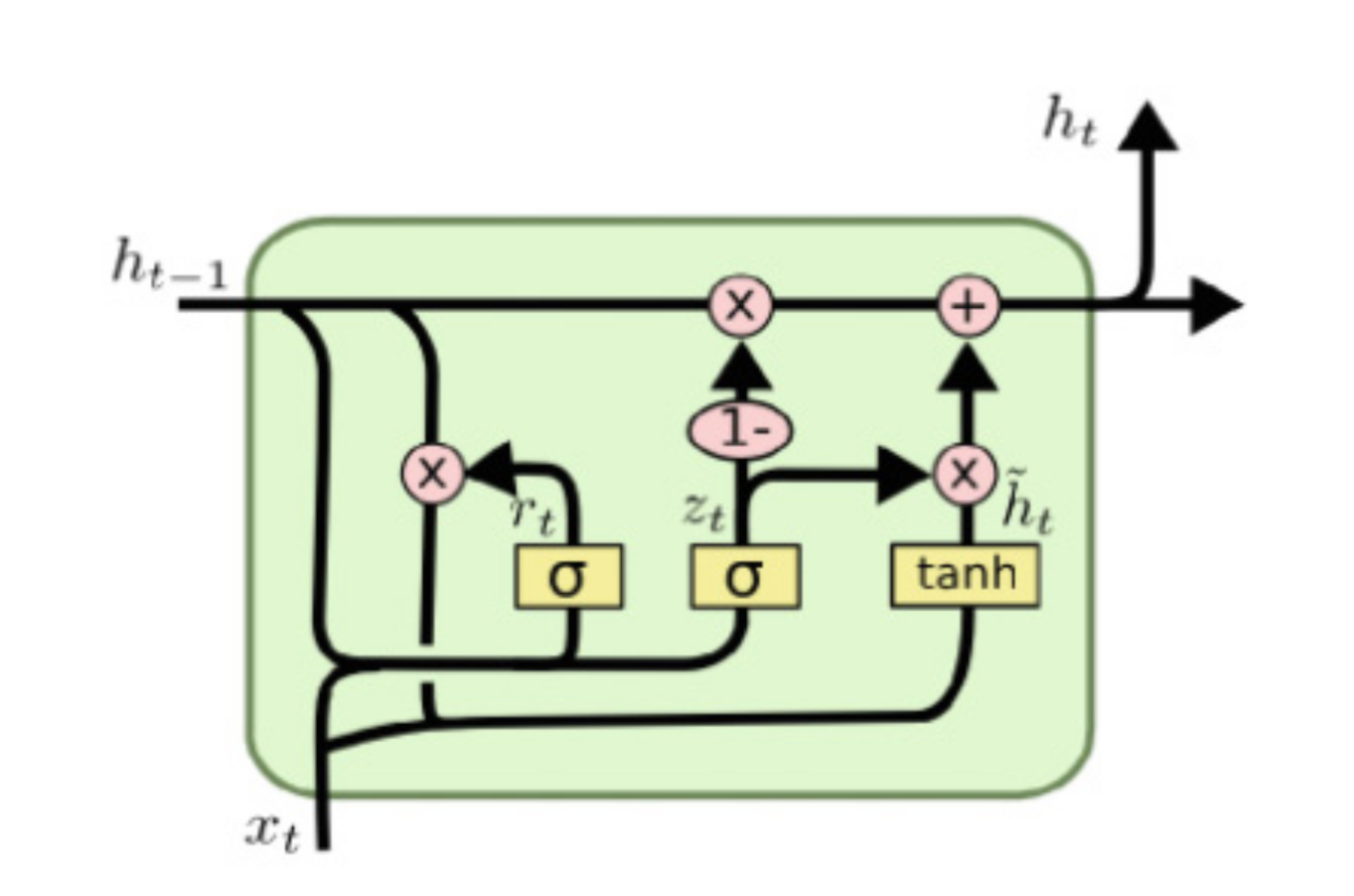
Gated Recurrent Unit Model with Depth Estimator
4. Experimental Validation and Results
4.1. Inference and Training
4.2. Data Processing
4.3. Depth Estimation Results and Validation
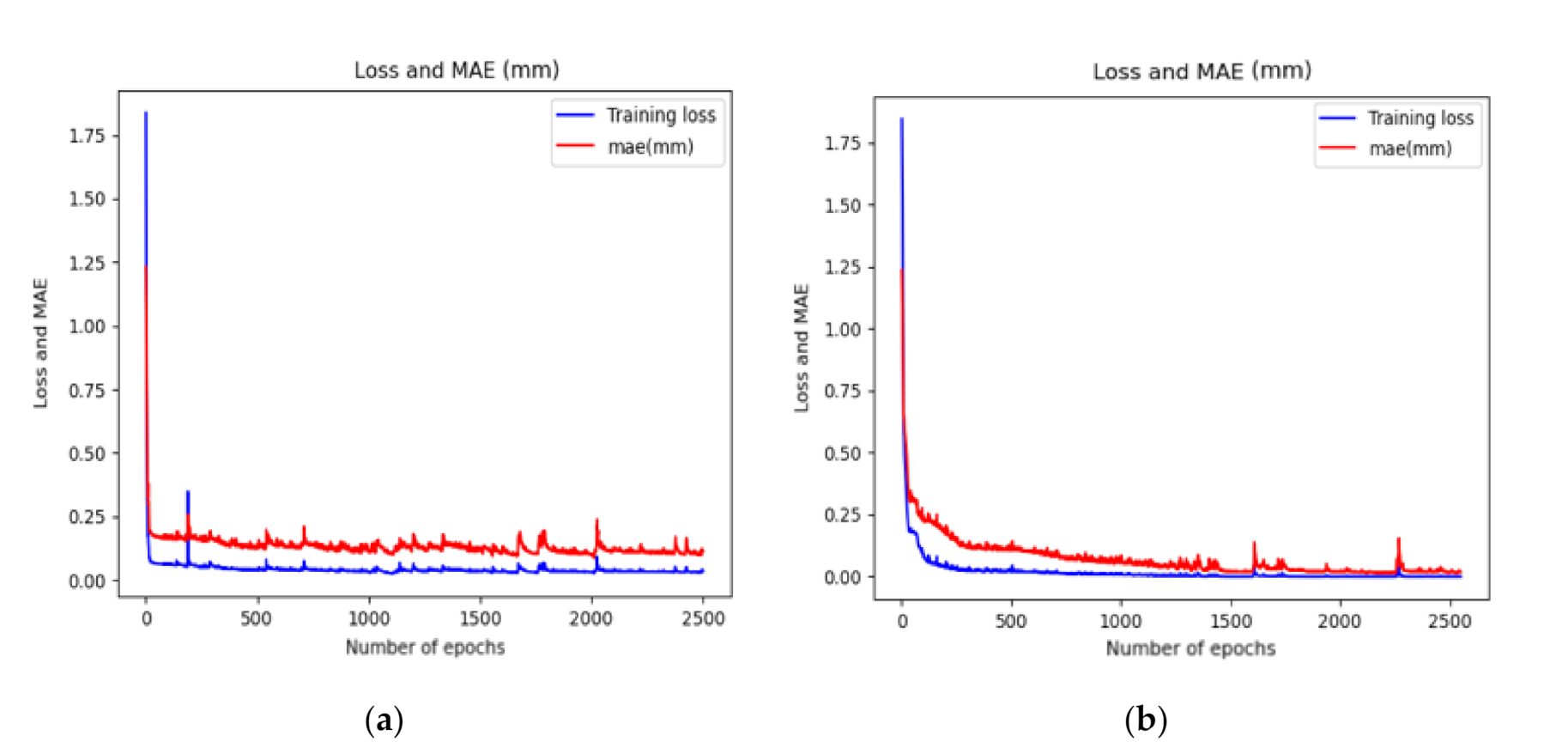
Result Analysis—Mean Absolute Error (MAE)
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- D’Accardi, E.; Palano, F.; Tamborrino, R.; Palumbo, D.; Tatì, A.; Terzi, R.; Galietti, U. Pulsed phase thermography approach for the characterization of delaminations in cfrp and comparison to phased array ultrasonic testing. J. Nondestruct. Eval. 2019, 38, 20. [Google Scholar] [CrossRef]
- Rajic, N. Principal component thermography for flaw contrast enhancement and flaw depth characterisation in composite structures. Compos. Struct. 2002, 58, 521–528. [Google Scholar] [CrossRef]
- Martin, R.E.; Gyekenyesi, A.L.; Shepard, S.M. Interpreting the results of pulsed thermography data. Mater. Eval. 2003, 61, 611–616. [Google Scholar]
- Shepard, S.M.; Lhota, J.R.; Rubadeux, B.A.; Wang, D.; Ahmed, T. Reconstruction and enhancement of active thermographic image sequences. Opt. Eng. 2003, 42, 1337–1342. [Google Scholar] [CrossRef]
- Weng, J.; Zhang, Y.; Hwang, W.S. Candid covariance-free incremental principal component analysis. IEEE Trans. Pattern Anal. Machine Intell. 2003, 25, 1034–1040. [Google Scholar] [CrossRef]
- Sun, J.G. Analysis of pulsed thermography methods for defect depth prediction. J. Heat Transf. 2006, 128, 329–338. [Google Scholar] [CrossRef]
- Darabi, A.; Maldague, X. Neural network-based defect detection and depth estimation in TNDE. Ndt E Int. 2002, 35, 165–175. [Google Scholar] [CrossRef]
- Chung, J.; Gulcehre, C.; Cho, K.H.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Zissis, G.J. Infrared technology fundamentals. Opt. Eng. 1976, 15, 156484. [Google Scholar] [CrossRef]
- Saeed, N.; Abdulrahman, Y.; Amer, S.; Omar, M.A. Experimentally validated defect depth estimation using artificial neural network in pulsed thermography. Infrared Phys. Technol. 2019, 98, 192–200. [Google Scholar] [CrossRef]
- Peeters, J.; Steenackers, G.; Ribbens, B.; Arroud, G.; Dirckx, J. Finite element optimization by pulsed thermography with adaptive response surfaces. In Proceedings of the 12th International Conference on Quantitative Infrared Thermography (QIRT), Bordeaux, France, 7–11 July 2014. [Google Scholar]
- Lopez, F.; de Paulo Nicolau, V.; Ibarra-Castanedo, C.; Maldague, X. Thermal–numerical model and computational simulation of pulsed thermography inspection of carbon fiber-reinforced composites. Int. J. Therm. Sci. 2014, 86, 325–340. [Google Scholar] [CrossRef]
- Pilling, M.W.; Yates, B.; Black, M.A.; Tattersall, P. The thermal conductivity of carbon fibre-reinforced composites. J. Mater. Sci. 1979, 14, 1326–1338. [Google Scholar] [CrossRef]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Gated Feedback Recurrent Neural Networks. 2015. Available online: http://proceedings.mlr.press/v37/chung15.pdf (accessed on 28 September 2020).
- Gulcehre, C.; Cho, K.; Pascanu, R.; Bengio, Y. Learned-Norm Pooling for Deep Feedforward and Recurrent Neural Networks. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Horn, R.A. The hadamard product. Proc. Symp. Appl. Math. 1990, 40, 87–169. [Google Scholar]
- Kassam, S. Quantization based on the mean-absolute-error criterion. IEEE Trans. Commun. 1978, 26, 267–270. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sign | Parameters in Experimental Simulation | Real Value |
|---|---|---|
| Material density | 1500 | |
| Emissivity | 0.90 | |
| Constant specific heating | 1000 | |
| L | Specimen length | 300 mm |
| W | Specimen with | 300 mm |
| H | Specimen height | 5 mm |
| Processing time to finish computations | 9 s | |
| The temperature from initialization | 293.15 k | |
| The temperature from ambient | 293.15 k | |
| Heat source wattage | 600 Watts | |
| Heat source center | (15 cm, 15 cm) | |
| P | Heat pulse density | 100,000 |
| h | The distance between the lamp and specimen | 80 cm |
| S | Time step | 0.0063 s |
| Heating time | 0.0126 s |
| Sample | Row | Depth(mm) | Shape | Defect Size (mm) |
|---|---|---|---|---|
| 1 | 1 | 0.5 mm | Quadrangle | Size = 10; 15; 18 |
| 2 | 0.6 mm | Round | Diameter = 18; 15; 5 | |
| 3 | 0.7 mm | Quadrangle | Size = 5; 10; 18 | |
| 2 | 1 | 0.8 mm | Quadrangle | Size = 5; 10; 15 |
| 2 | 0.9 mm | Round | Diameter = 18; 15; 10 | |
| 3 | 1.0 mm | Quadrangle | Size = 5; 15; 18 | |
| 3 | 1 | 1.1 mm | Quadrangle | Size = 5; 10; 18 |
| 2 | 1.2 mm | Round | Diameter = 15; 10; 5 | |
| 3 | 1.3 mm | Quadrangle | Size = 10; 15; 18 | |
| 4 | 1 | 1.4 mm | Round | Size = 5; 15; 18 |
| 2 | 1.5 mm | Quadrangle | Diameter = 18;10; 5 | |
| 3 | 1.6 mm | Round | Size = 5; 10; 15 | |
| 5 | 1 | 1.7 mm | Round | Diameter = 10; 15; 18 |
| 2 | 1.8 mm | Quadrangle | Size = 18; 15; 5 | |
| 3 | 1.9 mm | Round | Diameter = 5; 10; 18 | |
| 6 | 1 | 2.0 mm | Round | Diameter = 5; 10 ;15 |
| 2 | 2.1 mm | Quadrangle | Size = 18; 15;10 | |
| 3 | 2.2 mm | Round | Diameter = 5 ;15 ;18 |
| Sample | Row# | Depth (Left; Middle; Right) | Shape | Defect Size (Left; Middle; Right) (mm) |
|---|---|---|---|---|
| A | 1 | Depth = 0.5; 0.8; 1.1 | Quadrangle | Size = 3 ;16 ;13 |
| 2 | Depth = 0.6; 0.9; 1.2 | Round | Diameter = 8; 3; 16 | |
| 3 | Depth = 0.7; 1.0; 1.3 | Quadrangle | Size = 13; 8; 16 | |
| B | 1 | Depth = 1.4; 1.7; 2.0 | Quadrangle | Size = 8; 3; 16 |
| 2 | Depth = 1.5; 1.8; 2.1 | Round | Diameter = 13; 8; 3 | |
| 3 | Depth = 1.6; 1.9; 2.2 | Quadrangle | Size = 16; 13; 8 | |
| C | 1 | Depth = 0.5; 0.8; 1.1 | Round | Size = 4; 17; 14 |
| 2 | Depth = 0.6; 0.9; 1.2 | Quadrangle | Diameter = 9; 4; 17 | |
| 3 | Depth = 0.7; 1.0; 1.3 | Round | Size = 14; 9; 4 | |
| D | 1 | Depth = 1.4; 1.7; 2.0 | Round | Size = 9; 4; 17 |
| 2 | Depth = 1.5; 1.8; 2.1 | Quadrangle | Diameter = 14;9;4 | |
| 3 | Depth = 1.6; 1.9; 2.2 | Round | Size = 17; 14; 9 |
| Sample | Expected Output (mm) | Estimated Output 1 (mm) | MAE1 * (mm) | Estimated Output 2 (mm) | MAE2 * (mm) |
|---|---|---|---|---|---|
| A C | 0.5 | 0.522 | 0.022 | 0.507 | 0.007 |
| A C | 0.6 | 0.604 | 0.004 | 0.603 | 0.003 |
| A C | 0.7 | 0.708 | 0.008 | 0.706 | 0.006 |
| A C | 0.8 | 0.814 | 0.014 | 0.807 | 0.007 |
| A C | 0.9 | 0.912 | 0.012 | 0.913 | 0.013 |
| A C | 1.0 | 1.041 | 0.041 | 1.025 | 0.025 |
| A C | 1.1 | 1.109 | 0.009 | 1.011 | 0.011 |
| A C | 1.2 | 1.222 | 0.022 | 1.218 | 0.018 |
| A C | 1.3 | 1.318 | 0.018 | 1.314 | 0.014 |
| B D | 1.4 | 1.420 | 0.020 | 1.418 | 0.018 |
| B D | 1.5 | 1.514 | 0.014 | 1.509 | 0.009 |
| B D | 1.6 | 1.630 | 0.030 | 1.619 | 0.019 |
| B D | 1.7 | 1.718 | 0.018 | 1.715 | 0.015 |
| B D | 1.8 | 1.820 | 0.020 | 1.817 | 0.017 |
| B D | 1.9 | 1.918 | 0.018 | 1.920 | 0.020 |
| B D | 2.0 | 2.013 | 0.013 | 2.005 | 0.005 |
| B D | 2.1 | 2.112 | 0.012 | 2.010 | 0.010 |
| B D | 2.2 | 2.225 | 0.025 | 2.222 | 0.022 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, Q.; Maldague, X. A Method of Defect Depth Estimation for Simulated Infrared Thermography Data with Deep Learning. Appl. Sci. 2020, 10, 6819. https://doi.org/10.3390/app10196819
Fang Q, Maldague X. A Method of Defect Depth Estimation for Simulated Infrared Thermography Data with Deep Learning. Applied Sciences. 2020; 10(19):6819. https://doi.org/10.3390/app10196819
Chicago/Turabian StyleFang, Qiang, and Xavier Maldague. 2020. "A Method of Defect Depth Estimation for Simulated Infrared Thermography Data with Deep Learning" Applied Sciences 10, no. 19: 6819. https://doi.org/10.3390/app10196819
APA StyleFang, Q., & Maldague, X. (2020). A Method of Defect Depth Estimation for Simulated Infrared Thermography Data with Deep Learning. Applied Sciences, 10(19), 6819. https://doi.org/10.3390/app10196819