Design and Implementation of a Graphic Simulator for Calculating the Inverse Kinematics of a Redundant Planar Manipulator Robot



Abstract
1. Introduction
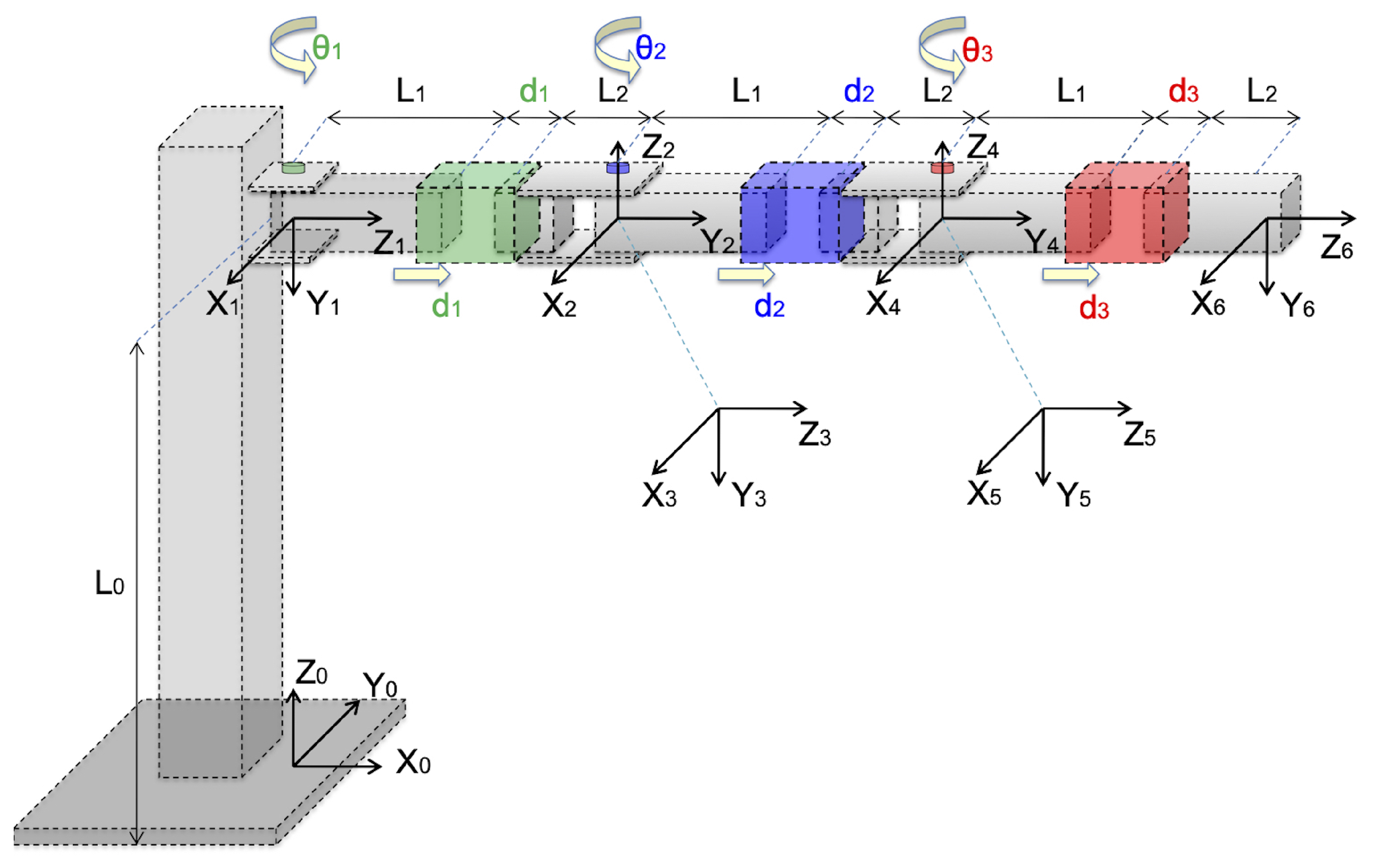
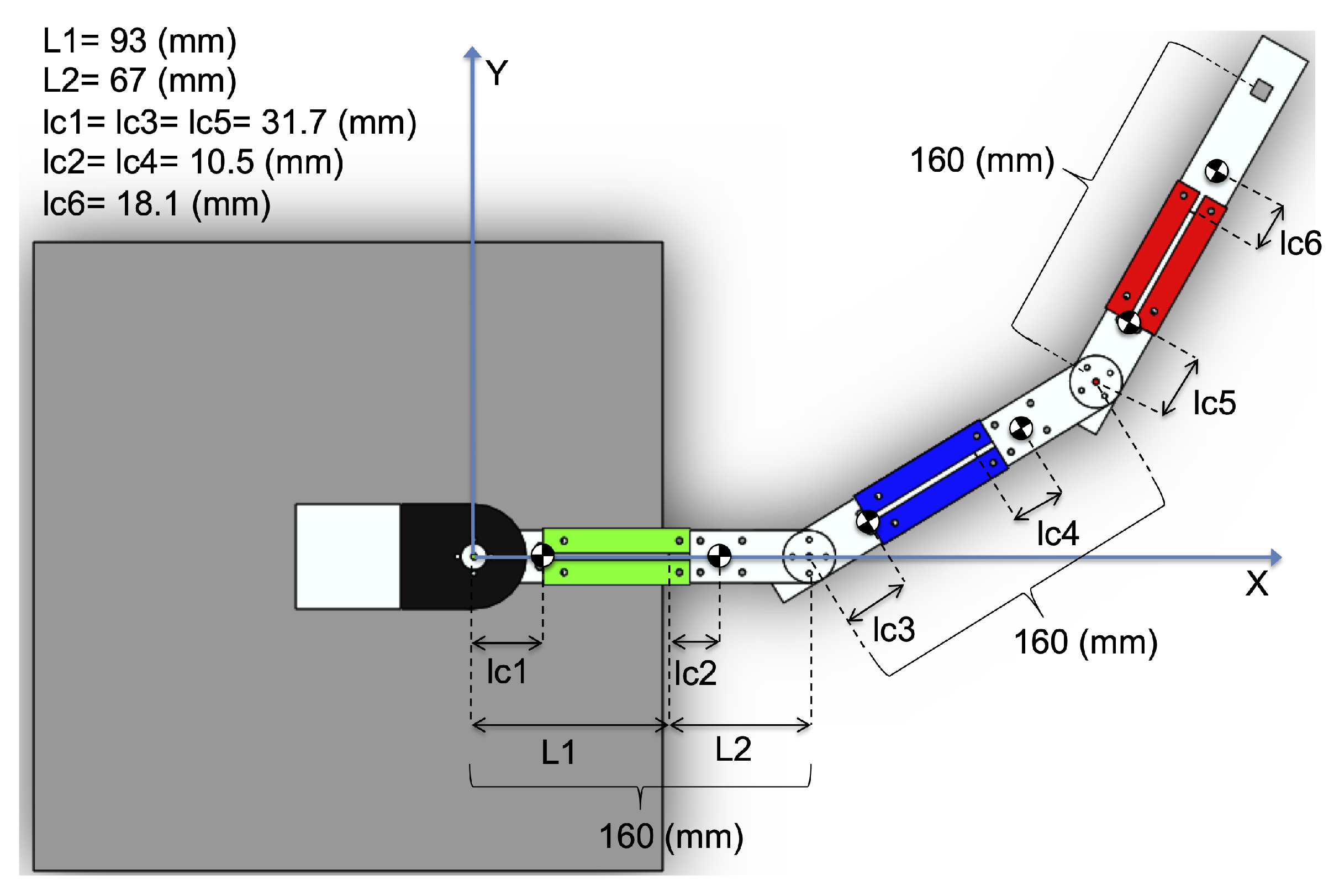
2. Description of the 6-Dof Redundant Planar Manipulator Robot
3. Kinematic Analysis
Forward Kinematics of the 6-Dof Redundant Planar Manipulator Robot
4. Direct Dynamics of the 6-Dof Redundant Planar Manipulator Robot
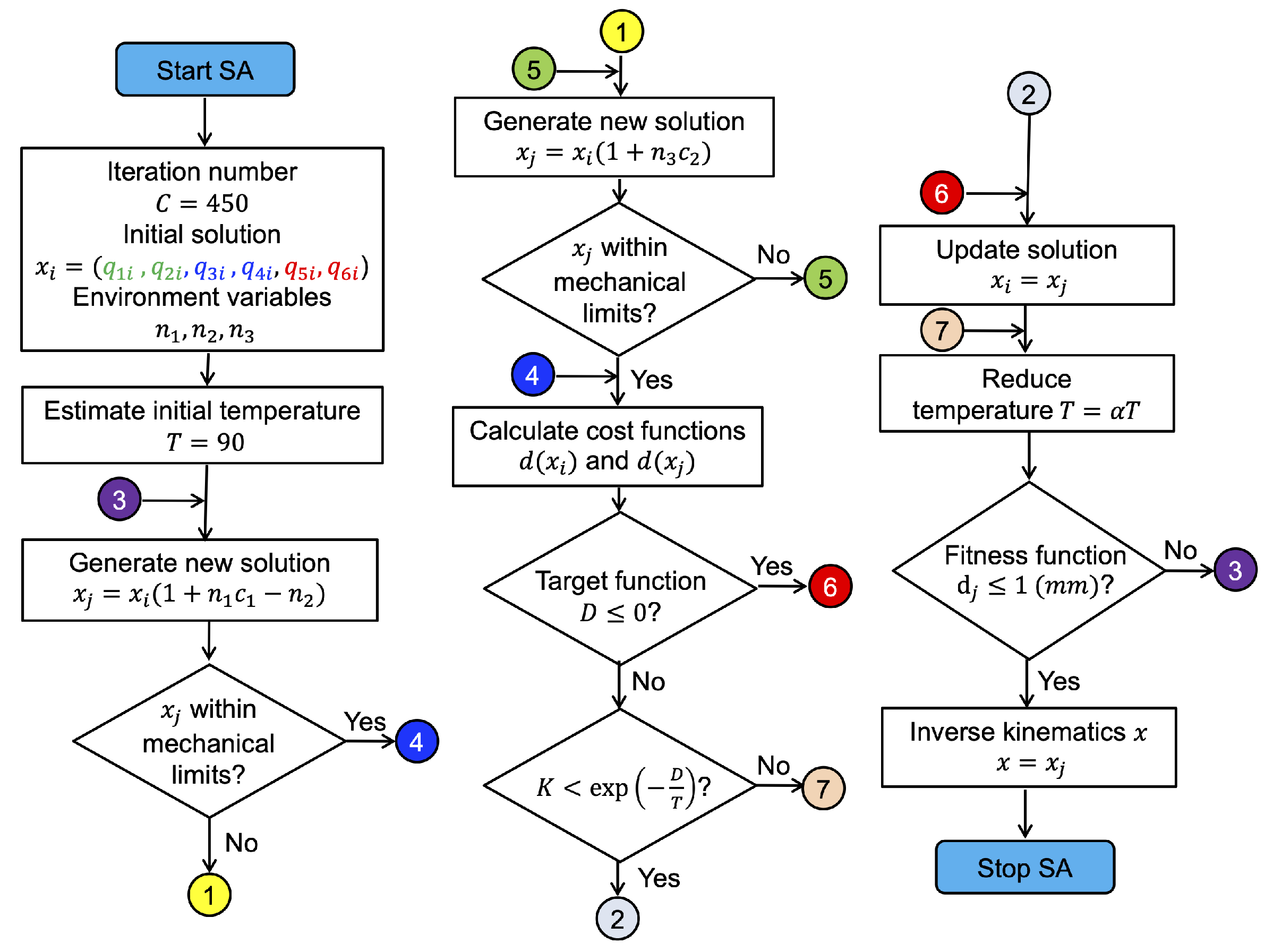
5. Simulated Annealing Algorithm
5.1. Description of the Annealing Process
5.2. Application of the SA Algorithm to the 6-DoF Redundant Planar Manipulator Robot
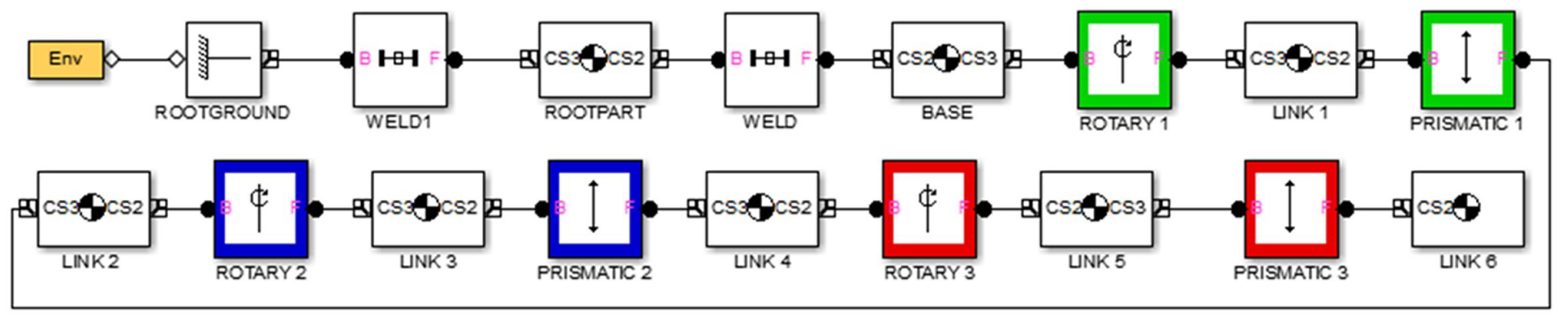
6. Graphic Simulator
Simmechanics™ Model
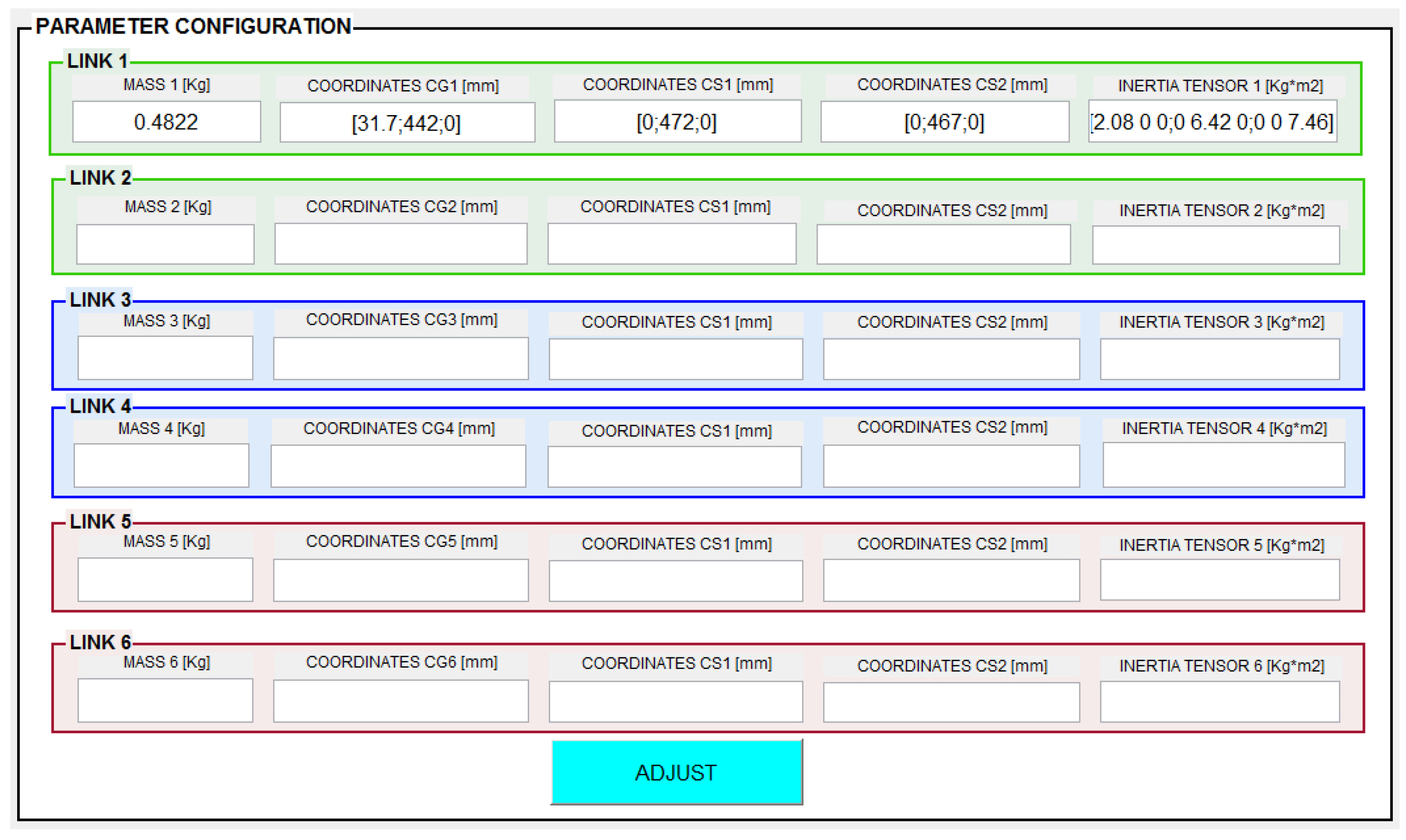
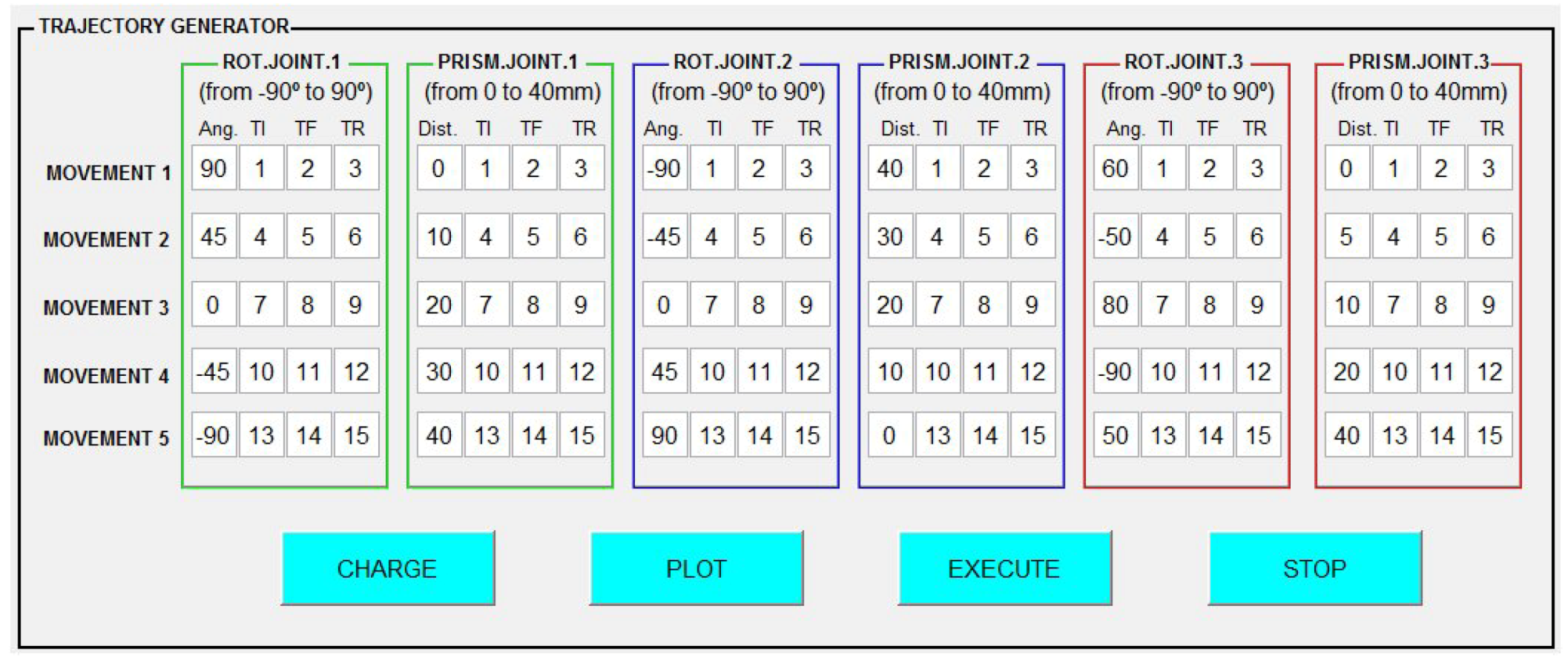
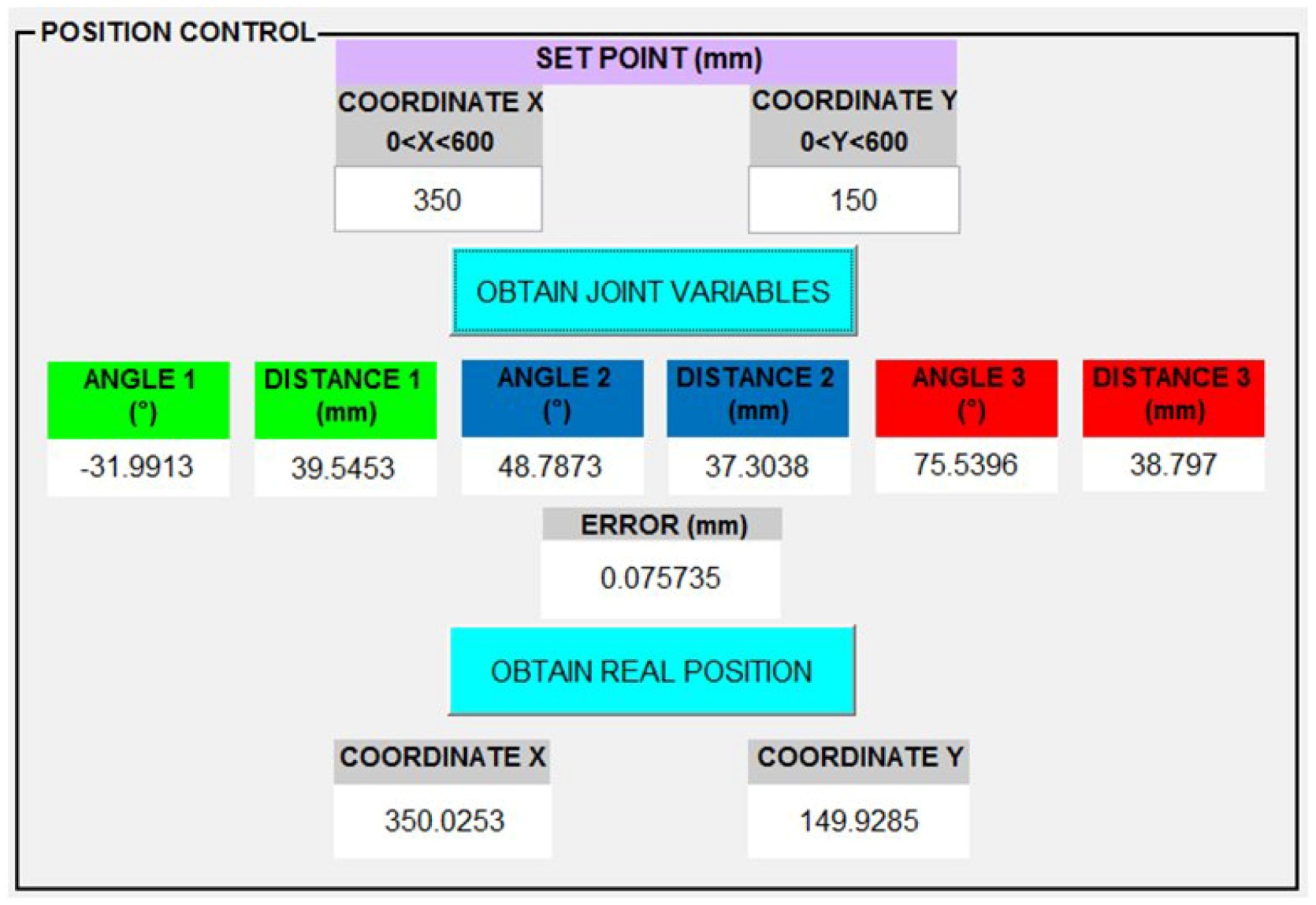
7. Graphic Interface
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Aljalal, M.; Ibrahim, S.; Djemal, R.; Ko, W. Comprehensive review on brain-controlled mobile robots and robotic arms based on electroencephalography signals. Intell. Serv. Robot. 2020. [Google Scholar] [CrossRef]
- Kim, J.; Cauli, N.; Vicente, P.; Damas, B.; Bernardino, A.; Santos-Victor, J.; Cavallo, F. Cleaning tasks knowledge transfer between heterogeneous robots: A deep learning approach. J. Intell. Robot. Syst. 2020, 98, 191–205. [Google Scholar] [CrossRef]
- Wang, Z.; Or, K.; Hirai, S. A dual-mode soft gripper for food packaging. Robot. Auton. Syst. 2020, 125, 103427. [Google Scholar] [CrossRef]
- Iqbal, H.; Khan, M.U.A.; Yi, B.-J. Analysis of duality-based interconnected kinematics of planar serial and parallel manipulators using screw theory. Intell. Serv. Robot. 2020, 13, 47–62. [Google Scholar] [CrossRef]
- Kern, J.; Jamett, M.; Urrea, C.; Torres, H. Development of a neural controller applied in a 5-DoF robot redundant. IEEE Lat. Am. Trans. 2014, 12, 98–106. [Google Scholar] [CrossRef]
- Le, Q.D.; Kang, H.-J. Finite-time fault-tolerant control for a robot manipulator based on synchronous terminal sliding mode control. Appl. Sci. 2020, 10, 2998. [Google Scholar] [CrossRef]
- Cieślak, P.; Simoni, R.; Ridao Rodríguez, P.; Youakim, D. Practical formulation of obstacle avoidance in the task-priority framework for use in robotic inspection and intervention scenarios. Robot. Auton. Syst. 2020, 124, 103396. [Google Scholar] [CrossRef]
- Shanda, W.; Xiao, L.; Qingsheng, L.; Baoling, H. Existence conditions and general solutions of closed-form inverse kinematics for revolute serial robots. Appl. Sci. 2019, 9, 4365. [Google Scholar] [CrossRef]
- Fan, S.; Xie, X.; Zhou, X. Optimum manipulator path generation based on improved differential evolution constrained optimization algorithm. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419872060. [Google Scholar] [CrossRef]
- Shafei, A.M.; Mirzaeinejad, H. A general formulation for managing trajectory tracking in non-holonomic moving manipulators with rotary-sliding joints. J. Intell. Robot. Syst. 2020. [Google Scholar] [CrossRef]
- Rahmani, M.; Rahman, M.H. Adaptive neural network fast fractional sliding mode control of a 7-DOF exoskeleton robot. Int. J. Control Autom. Syst. 2020, 18, 124–133. [Google Scholar] [CrossRef]
- Bobrow, J.E.; Martin, B.; Sohl, G.; Wang, E.C.; Park, F.C.; Kim, J. Optimal robot motions for physical criteria. J. Robot. Syst. 2001, 18, 785–795. [Google Scholar] [CrossRef]
- López-Franco, C.; Hernandez-Barragan, J.; Alanis, A.Y.; Arana-Daniel, N. A soft computing approach for inverse kinematics of robot manipulators. Eng. Appl. Artif. Intell. 2018, 74, 104–120. [Google Scholar] [CrossRef]
- Li, T.; Zheng, S.; Shu, X.; Wang, C.; Liu, C. Self-recognition grasping operation with a vision-based redundant manipulator system. Appl. Sci. 2019, 9, 5172. [Google Scholar] [CrossRef]
- Qian, Y.; Yuan, J.; Wan, W. Improved trajectory planning method for space robot-system with collision prediction. J. Intell. Robot. Syst. 2020, 99, 289–302. [Google Scholar] [CrossRef]
- Teja, H.; Shah, S. Learning inverse kinematic solutions of redundant manipulators using multiple internal models. In Proceedings of the 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Utown, Singapore, 26–29 June 2016; p. 1371. [Google Scholar]
- Zhao, R.; Shi, Z.; Guan, Y.; Shao, Z.; Zhang, Q.; Wang, G. Inverse kinematic solution of 6R robot manipulators based on screw theory and the Paden-Kahan subproblem. Int. J. Adv. Robot. Syst. 2018, 15, 1–11. [Google Scholar] [CrossRef]
- Bai, L.; Yang, J.; Chen, X.; Jiang, P.; Liu, F.; Zheng, F.; Sun, Y. Solving the time-varying inverse kinematics problem for the Da Vinci surgical robot. Appl. Sci. 2019, 9, 546. [Google Scholar] [CrossRef]
- Huang, Q.; Nie, L. A fast convergence efficiency method of inverse kinematics for robot manipulators. J. Appl. Sci. 2013, 13, 5174–5179. [Google Scholar] [CrossRef][Green Version]
- Park, S.-O.; Lee, M.C.; Kim, J. Trajectory planning with collision avoidance for redundant robots using jacobian and artificial potential field-based real-time inverse kinematics. Int. J. Control Autom. Syst. 2020, 18, 2095–2107. [Google Scholar] [CrossRef]
- Besset, P.; Taylor, C.J. Inverse kinematics for a redundant robotic manipulator used for nuclear decommissioning. In Proceedings of the UKACC International Conference on Control (CONTROL), Loughborough, UK, 9–11 July 2014; pp. 56–61. [Google Scholar]
- Farzan, S.; DeSouza, G.N. A parallel evolutionary solution for the inverse kinematics of generic robotic manipulators. In Proceedings of the IEEE Congress on Evolutionary Computation (CEC), Beijing, China, 6–11 July 2014; pp. 358–365. [Google Scholar]
- Köker, R.; Cakar, T. A neuro-genetic-simulated annealing approach to the inverse kinematics solution of robots: A simulation based study. Eng. Comput. 2016, 32, 553–565. [Google Scholar] [CrossRef]
- López-Franco, C.; Hernández-Barragán, J.; Alanis, A.Y.; Arana-Daniel, N.; López-Franco, M. Inverse kinematics of mobile manipulators based on differential evolution. Int. J. Adv. Robot. Syst. 2018, 15, 1–22. [Google Scholar] [CrossRef]
- Dereli, S.; Köker, R. Simulation based calculation of the inverse kinematics solution of 7-DOF robot manipulator using artificial bee colony algorithm. SN Appl. Sci. 2020, 2, 27. [Google Scholar] [CrossRef]
- Zhou, Z.; Guo, H.; Wang, Y.; Zhu, Z.; Wu, J.; Liu, X. Inverse kinematics solution for robotic manipulator based on extreme learning machine and sequential mutation genetic algorithm. Int. J. Adv. Robot. Syst. 2018, 15, 1–15. [Google Scholar] [CrossRef]
- Song, B.; Wang, Z.; Zou, L.; Xu, L.; Alsaadi, F.E. A new approach to smooth global path planning of mobile robots with kinematic constraints. Int. J. Mach. Learn. Cybern. 2019, 10, 107–119. [Google Scholar] [CrossRef]
- Kereluk, J.A.; Emami, M.R. A new modular, autonomously reconfigurable manipulator platform. Int. J. Adv. Robot. Syst. 2015, 12, 1–17. [Google Scholar] [CrossRef]
- Truong, L.V.; Huang, S.D.; Yen, V.T.; Cuong, P.V. Adaptive trajectory neural network tracking control for industrial robot manipulators with deadzone robust compensator. Int. J. Control Autom. Syst. 2020, 1–12. [Google Scholar]
- Bjerkeng, M.; Pettersen, K.Y. A new Coriolis matrix factorization. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 4974–4979. [Google Scholar]
- Zarrin, A.; Azizi, S.; Aliasghary, M. A novel inverse kinematics scheme for the design and fabrication of a five degree of freedom arm robot. Int. J. Dyn. Control 2020, 8, 604–614. [Google Scholar] [CrossRef]
- Segota, S.B.; Andelic, N.; Lorencin, I.; Saga, M.; Car, Z. Path planning optimization of six-degree-of-freedom robotic manipulators using evolutionary algorithms. Int. J. Adv. Robot. Syst. 2020, 17, 1–16. [Google Scholar]
- García-Ródenas, R.; López-García, M.L.; Sánchez-Rico, M.T.; López-Gómez, J.A. A bilevel approach to enhance prefixed traffic signal optimization. Eng. Appl. Artif. Intell. 2019, 84, 51–65. [Google Scholar] [CrossRef]
- Bi, H.; Lu, F.; Duan, S.; Huang, M.; Zhu, J.; Liu, M. Two-level principal–agent model for schedule risk control of IT outsourcing project based on genetic algorithm. Eng. Appl. Artif. Intell. 2020, 91, 103584. [Google Scholar] [CrossRef]
- Ileri, Y.Y.; Hacibeyoglu, M. Advancing competitive position in healthcare: A hybrid metaheuristic nutrition decision support system. Int. J. Mach. Learn. Cybern. 2019, 10, 1385–1398. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | ||||
|---|---|---|---|---|
| 1 | 0 | |||
| 2 | 0 | |||
| 3 | 0 | 0 | ||
| 4 | 0 | |||
| 5 | 0 | 0 | ||
| 6 | 0 |
| Link | Mass (kg) | CG (mm) |
|---|---|---|
| 1 | 0.4822 | [31.7; 0; 442] |
| 2 | 0.6500 | [103.5; 0; 443.1] |
| 3 | 0.4822 | [191.7; 0; 442] |
| 4 | 0.6500 | [263.5; 0; 443.1] |
| 5 | 0.4822 | [351.7; 0; 442] |
| 6 | 0.6453 | [431; 0; 0.442] |
| Joint | Range |
|---|---|
| Rotary 1 | |
| Prismatic 1 | (mm) |
| Rotary 2 | |
| Prismatic 2 | (mm) |
| Rotary 3 | |
| Prismatic 3 | (mm) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Urrea, C.; Saa, D. Design and Implementation of a Graphic Simulator for Calculating the Inverse Kinematics of a Redundant Planar Manipulator Robot. Appl. Sci. 2020, 10, 6770. https://doi.org/10.3390/app10196770
Urrea C, Saa D. Design and Implementation of a Graphic Simulator for Calculating the Inverse Kinematics of a Redundant Planar Manipulator Robot. Applied Sciences. 2020; 10(19):6770. https://doi.org/10.3390/app10196770
Chicago/Turabian StyleUrrea, Claudio, and Daniel Saa. 2020. "Design and Implementation of a Graphic Simulator for Calculating the Inverse Kinematics of a Redundant Planar Manipulator Robot" Applied Sciences 10, no. 19: 6770. https://doi.org/10.3390/app10196770
APA StyleUrrea, C., & Saa, D. (2020). Design and Implementation of a Graphic Simulator for Calculating the Inverse Kinematics of a Redundant Planar Manipulator Robot. Applied Sciences, 10(19), 6770. https://doi.org/10.3390/app10196770