Comparison and Ranking of Metaheuristic Techniques for Optimization of PI Controllers in a Machine Drive System


Abstract
1. Introduction
2. Analytical Representation Regulation Scheme of PMSM
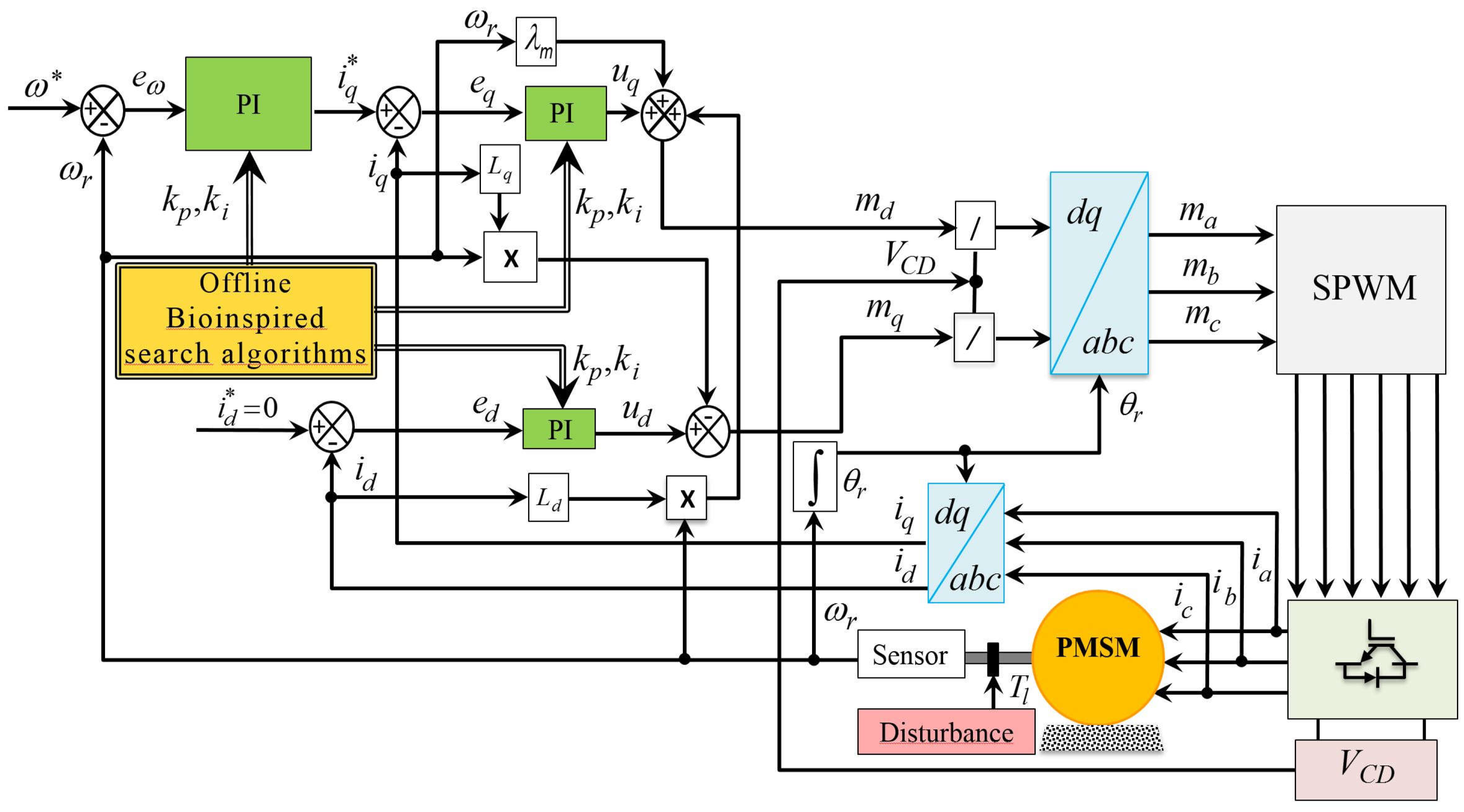
2.1. Dynamic Model
2.2. Control Algorithm
3. Objective Function for Parameters Tuning
4. Description of Search Algorithms
4.1. Overview of Cuckoo Search Optimization
| Algorithm 1: Cuckoo Search Optimization |
| begin Objective function J, = [, , , , ,] Generate initial population of host nests while ( Max Generation) or (stop criterion) Get a cuckoo randomly by Lévy flights Evaluate its fitness Choose a nest among N randomly if Replace j by the new solution end if Abandon a fraction () of worse nests Keep the best solutions (or nests with quality solutions) Rank the solutions and find the current best end while Show results and visualization end |
4.2. Overview of Dragonfly Algorith
| Algorithm 2: Dragonfly Algorithm |
| Define population size (M) Begin the iteration counter Initialize the population by generating for Calculate the objective function values of all dragonflies Update the food and the predator’s location While (the stop criterion is not satisfied) do For Update neighborhood radius (or update , and e) If a dragonfly has at least one neighborhood dragonfly Separation motion Alignment motion Cohesion motion Food attraction motion Predator distraction motion Else Update position vector using the Lévy flight function End if End for i Sort the population/dragonflies from best to and find the current best End while |
4.3. Overview of Flower Pollination Algorithm
| Algorithm 3: Flower Pollination Algorithm |
| Find the best solution in the initial population while MaxGeneration) for (all n flowers in the population) if rand < p, Draw a step vector L from a Lévy distribution Do global pollination else Draw from a uniform distribution in Do local pollination end if Evaluate new solutions If new solutions are better, update them in the population end for Find the current best solution end |
4.4. Overview of Whale Optimization Algorithm
| Algorithm 4: Whale Optimization Algorithm |
| Begin Calculate the fitness of each search agent = the best search agent while t ≤ do for each search agent do if then Update the position of the current search else if then Select a random search agent and Update the position of the current agent end if end for Update and Update if there is a better solution end while return end Begin |
4.5. Overview of Moth-Flame Optimization Algorithm
| Algorithm 5: Moth-flame Optimization Algorithm |
| Begin Initialize the positions of moths and evaluate their fitness values While (the stop criterion is not satisfied) Update flame no. = Fitness Function if iteration = 1 = sort = sort( Else = sort( = sort End if For For Update r and t Calculate with respect to the corresponding moth Update with respect to the corresponding moth End for j End for i End While Post-processing the results and visualization. End Begin |
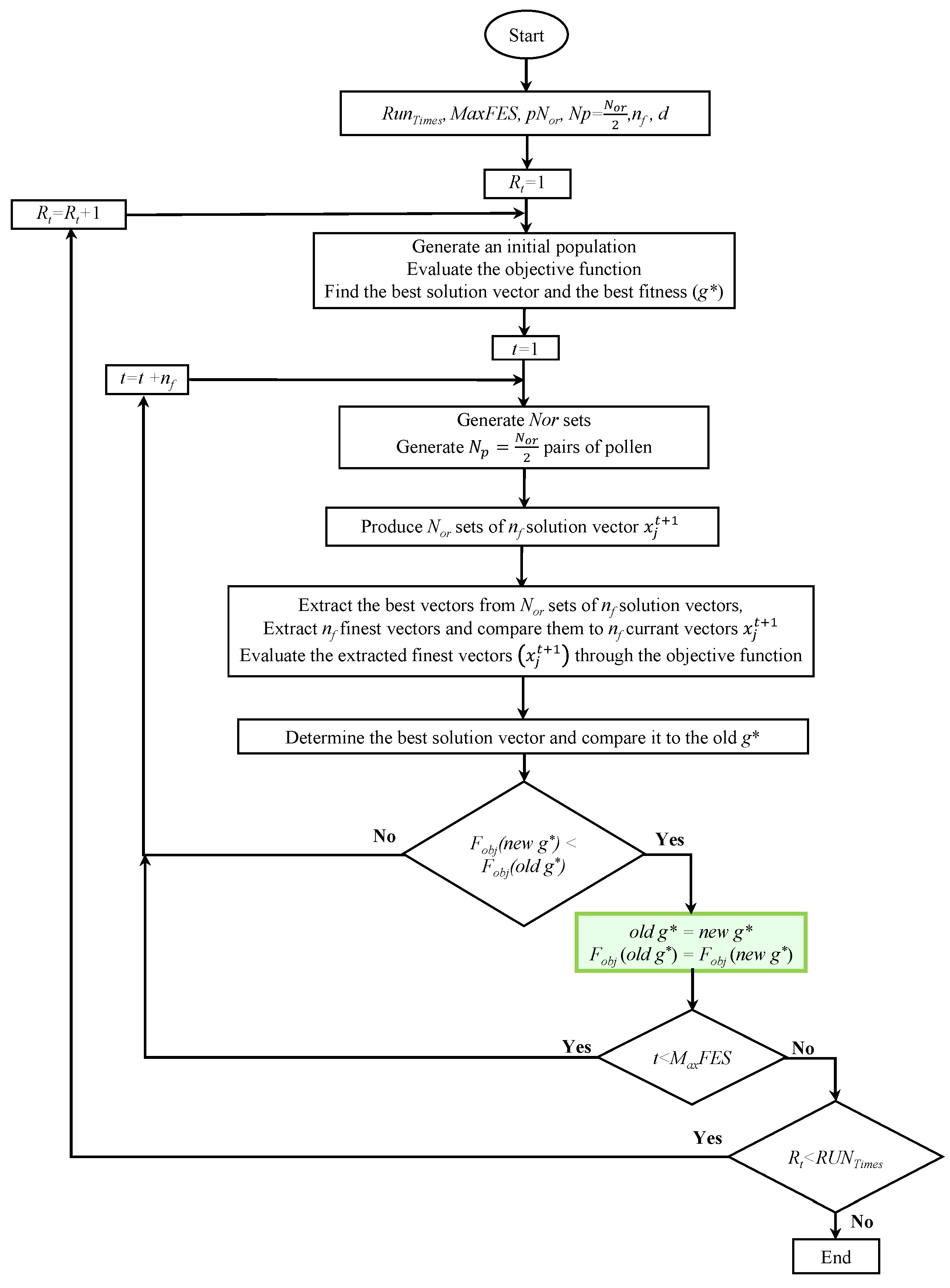
4.6. Overview of MOD-FPA
5. Controllers Tuning Methodology
5.1. Robustness Study
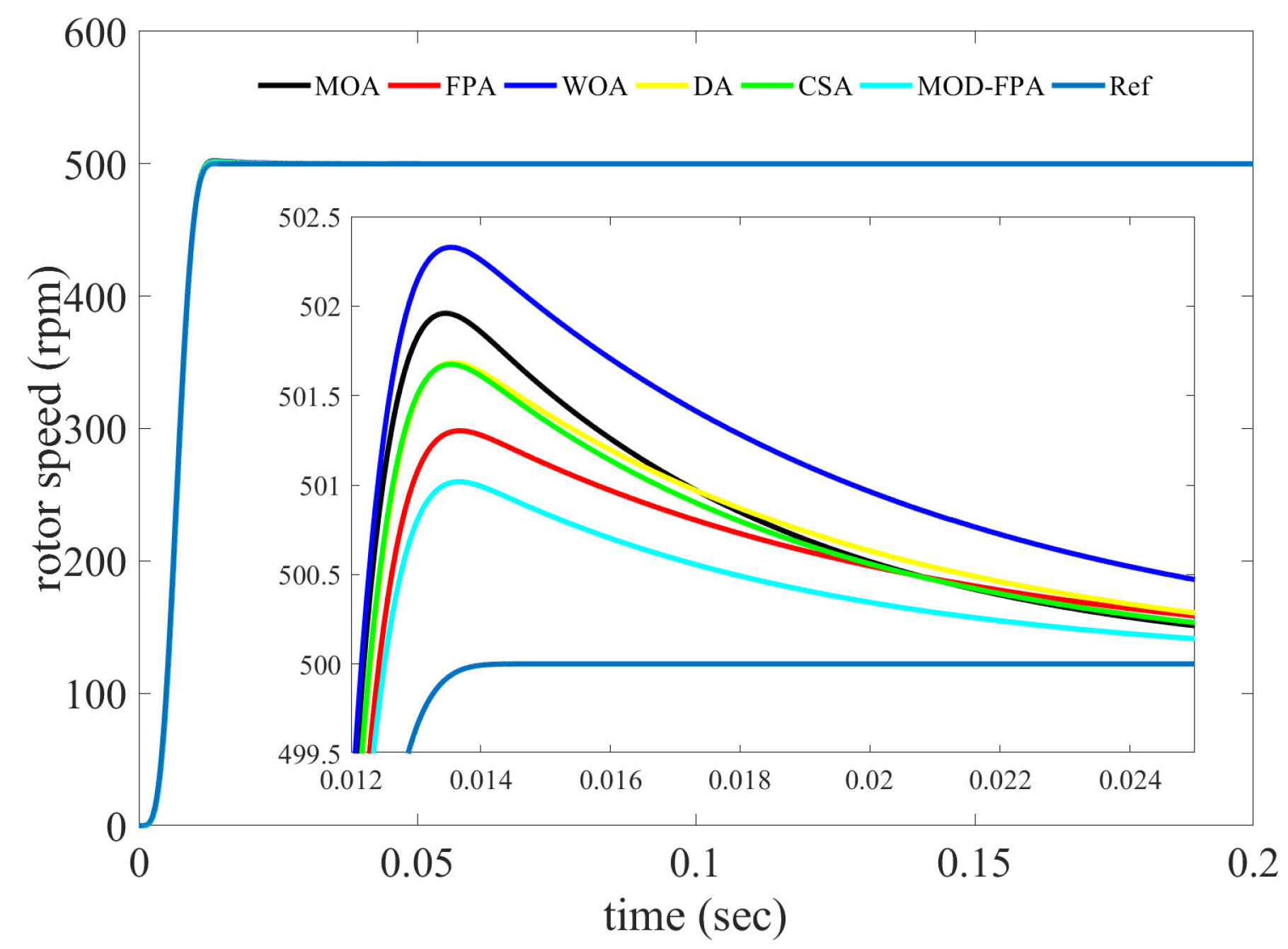
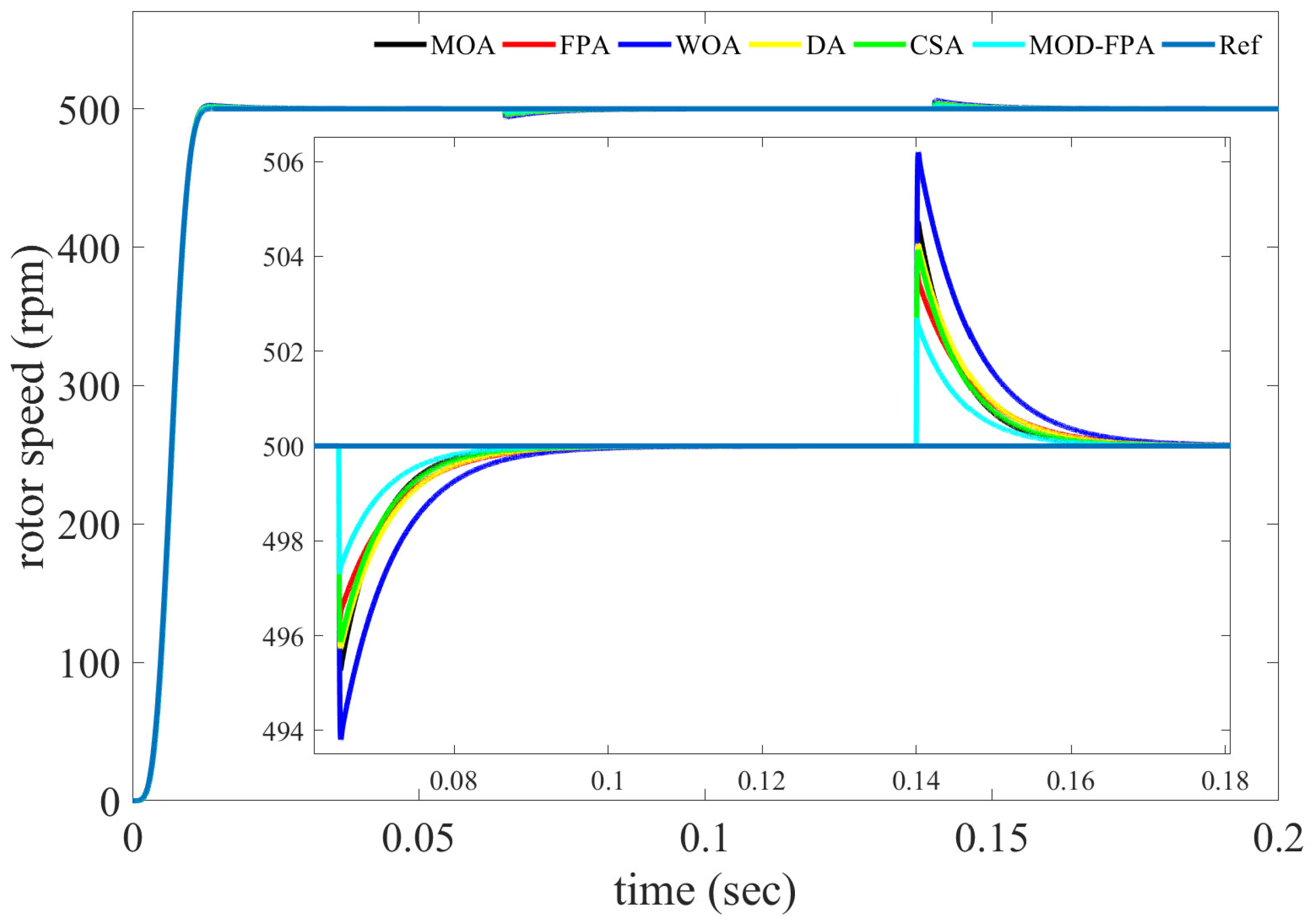
5.1.1. Simulation Result for Speed Tracking Task without Load and Nominal Parameters Condition
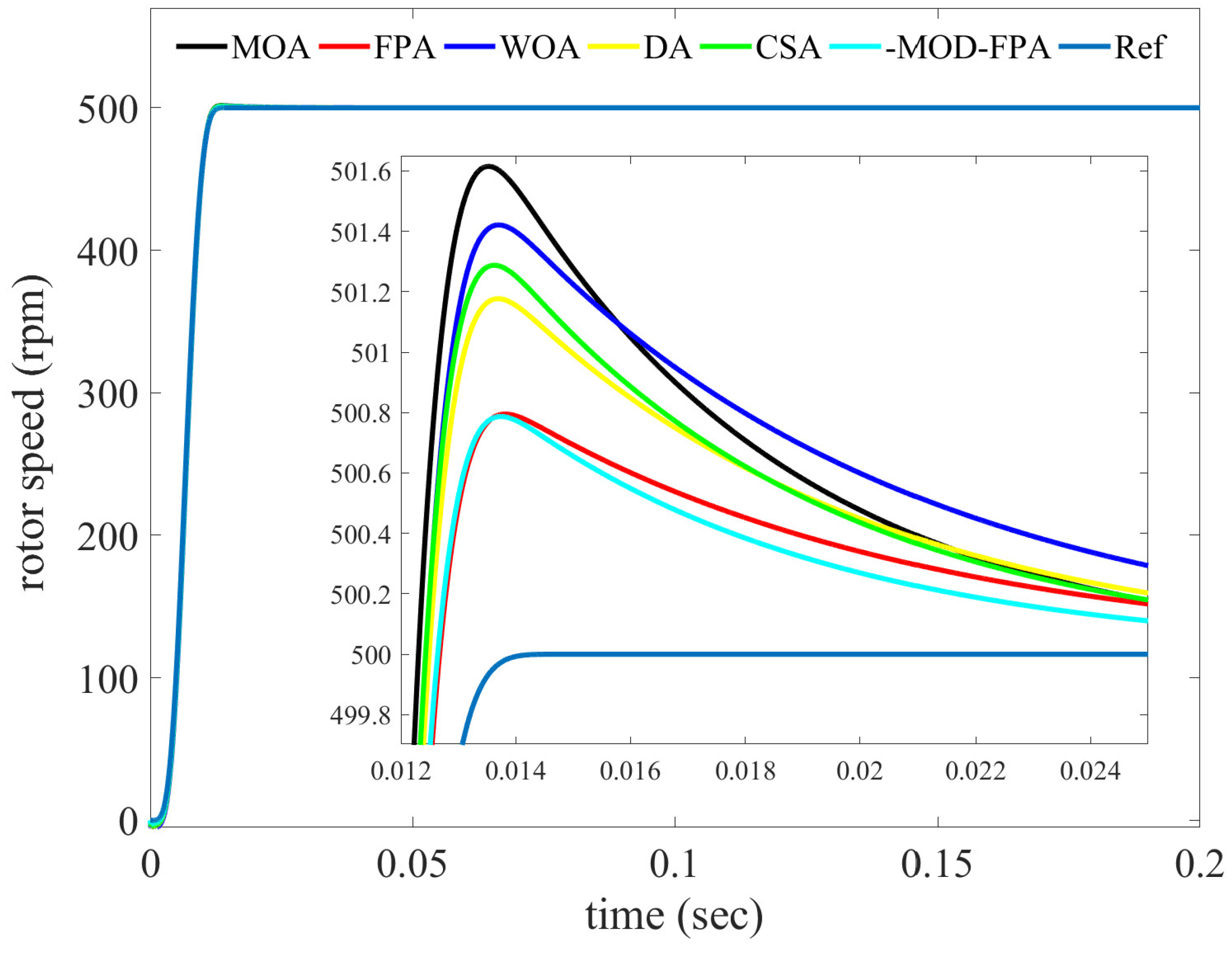
5.1.2. Simulation Result for Speed Tracking Task with Constant Load and Nominal Parameters Condition
5.1.3. Simulation Result for Varying Load at Constant Speed and Nominal Parameters Condition
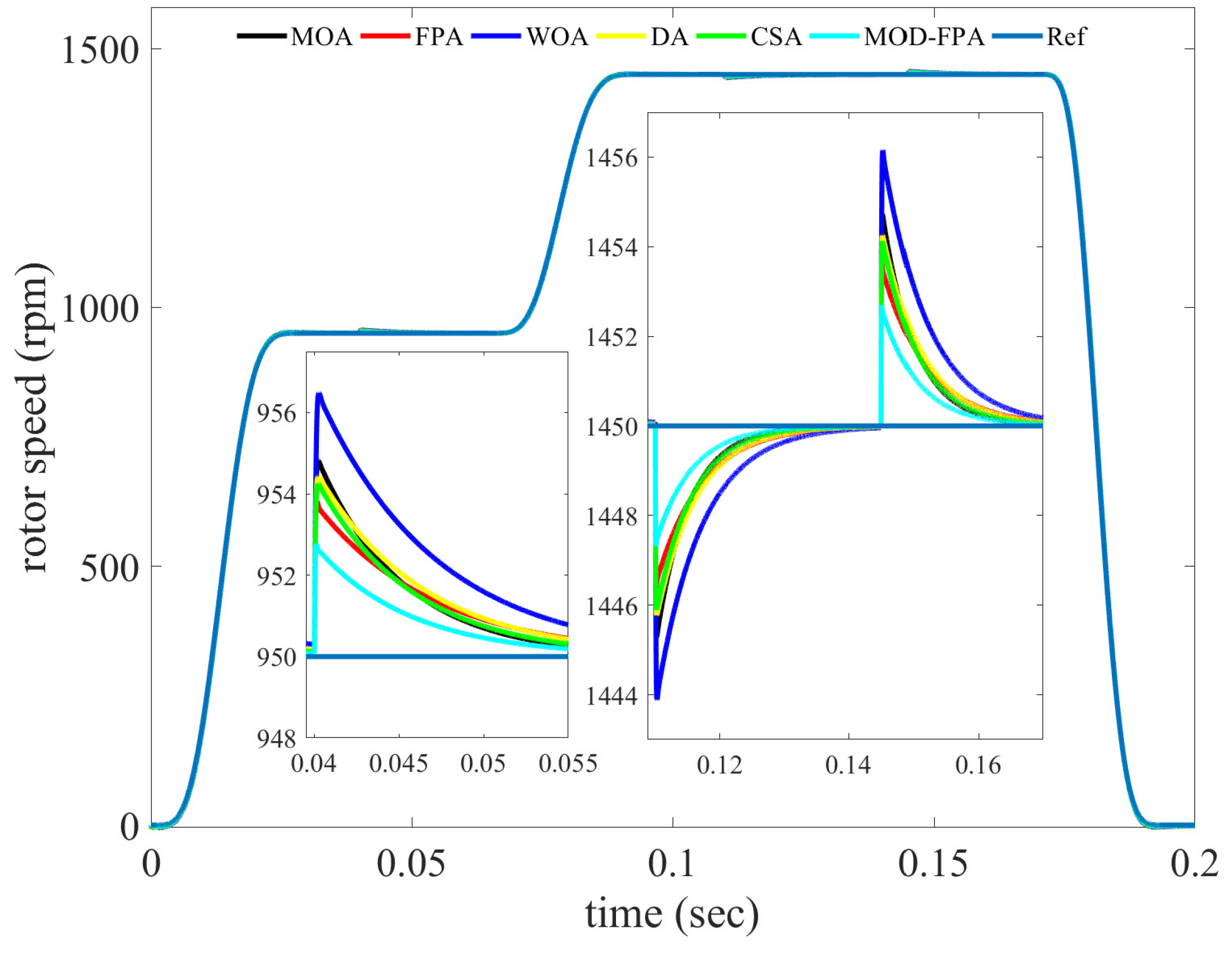
5.1.4. Simulation Result for Varying Set Rotor Speed and Load Torque, at Nominal Parameters Condition
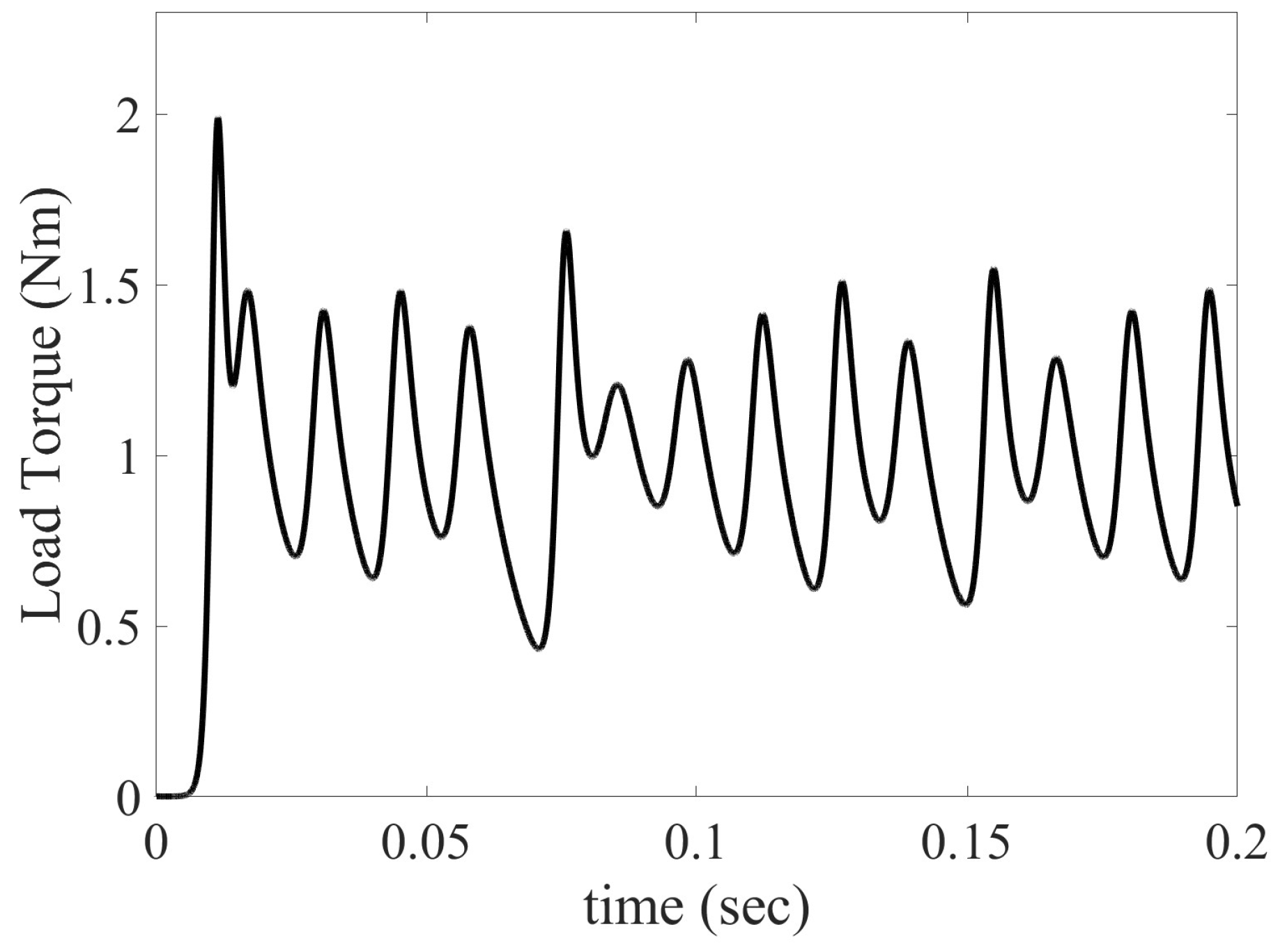
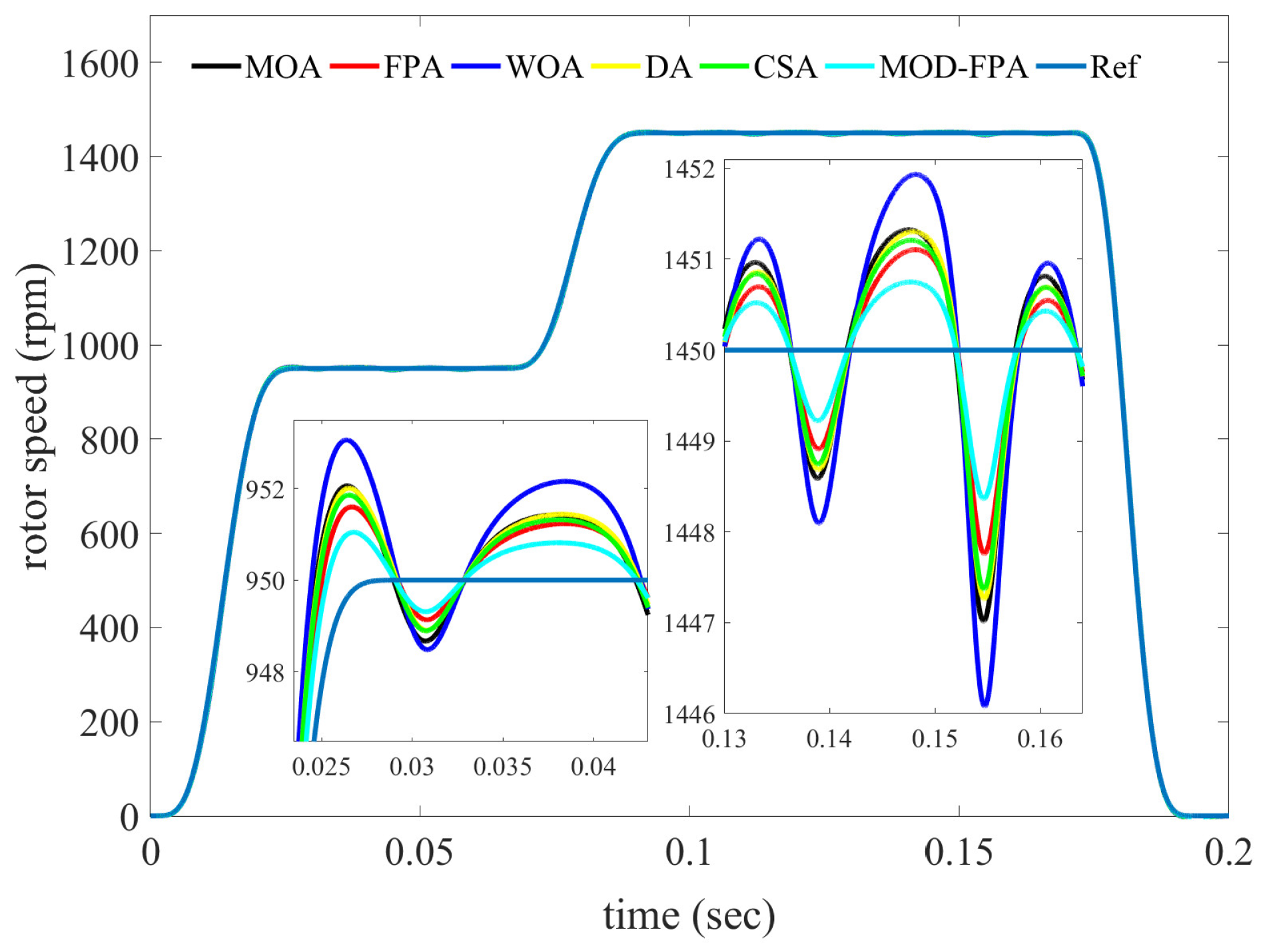
5.1.5. Simulation Result for Random Load Torque, Varying Set Rotor Speed and Nominal Parameters Condition
5.2. Sensitivity Study
5.2.1. Case 1, Load Torque Is Varied from 0 to 2 Nm and Nominal Parameters
5.2.2. Case 2, Load Torque Is Varied from 0 to 2 Nm, , and Nominal J, B,
5.2.3. Case 3, Load Torque Is Varied from 0 to 2 Nm, , , , and
5.2.4. Case 4, Load Torque Is Varied from 0 to 2 Nm, , , , and
6. Statistical Analysis
- Null hypothesis (), there is no difference between the results of the compared strategies,
- Alternative hypothesis (), there is a difference between the results of the differentiated strategies, in other word when the null hypothesis is false.
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, G.; Zhan, H.; Zhang, G.; Gui, X.; Xu, D. Adaptive Compensation Method of Position Estimation Harmonic Error for EMF-Based Observer in Sensorless IPMSM Drives. IEEE Trans. Power Electron. 2014, 29, 3055–3064. [Google Scholar] [CrossRef]
- Wu, Y.J.; Li, G.F. Adaptive disturbance compensation finite control set optimal control for PMSM systems based on sliding mode extended state observer. Mech. Syst. Signal Process. 2018, 98, 402–414. [Google Scholar] [CrossRef]
- Bolognani, S.; Calligaro, S.; Petrella, R. Adaptive flux-weakening controller for IPMSM drives. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 2437–2444. [Google Scholar]
- Kim, J.; Jeong, I.; Lee, K.; Nam, K. Fluctuating Current Control Method for a PMSM Along Constant Torque Contours. IEEE Trans. Power Electron. 2014, 29, 6064–6073. [Google Scholar] [CrossRef]
- Mendoza-Mondragón, F.; Hernández-Guzmán, V.M.; Rodríguez-Reséndiz, J. Robust Speed Control of Permanent Magnet Synchronous Motors Using Two-Degrees-of-Freedom Control. IEEE Trans. Ind. Electron. 2018, 65, 6099–6108. [Google Scholar] [CrossRef]
- Ye, S. A novel fuzzy flux sliding-mode observer for the sensorless speed and position tracking of PMSMs. Optik 2018, 171, 319–325. [Google Scholar] [CrossRef]
- Quang, N.P.; Dittrich, J.A. Vector Control of Three-Phase AC Machines System Development in the Practice, 2nd ed.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; Chapter 5; pp. 1–364. [Google Scholar]
- Krishnan, R. Permanent Magnet Synchronous and Brushless DC Motor Drives, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2010; Chapter 3; pp. 1–611. [Google Scholar]
- Ortega, R.; Monshizadeh, N.; Monshizadeh, P.; Bazylev, D.; Pyrkin, A. Permanent magnet synchronous motors are globally asymptotically stabilizable with PI current control. Automatica 2018, 98, 296–301. [Google Scholar] [CrossRef]
- Mohanty, B. Performance analysis of moth flame optimization algorithm for AGC system. Int. J. Model. Simul. 2019, 39, 73–87. [Google Scholar] [CrossRef]
- Sabir, M.M.; Ali, T. Optimal PID controller design through swarm intelligence algorithms for sun tracking system. Appl. Math. Comput. 2016, 274, 690–699. [Google Scholar] [CrossRef]
- Dash, P.; Saikia, L.C.; Sinha, N. Flower Pollination Algorithm Optimized PI-PD Cascade Controller in Automatic Generation Control of a Multi-area Power System. Int. J. Electr. Power Energy Syst. 2016, 82, 19–28. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Optimal tuning of 3 degree-of-freedom PID controller for hybrid distributed power system using dragonfly algorithm. Comput. Electr. Eng. 2018, 72, 137–153. [Google Scholar] [CrossRef]
- Bingul, Z.; Karahan, O. A novel performance criterion approach to optimum design of PID controller using cuckoo search algorithm for AVR system. J. Frankl. Inst. 2018, 355, 5534–5559. [Google Scholar] [CrossRef]
- Wang, J.J. Parameter optimization and speed control of switched reluctance motor based on evolutionary computation methods. Swarm Evol. Comput. 2018, 39, 86–98. [Google Scholar] [CrossRef]
- Hassanzadeh, M.E.; Hasanvand, S.; Nayeripour, M. Improved optimal harmonic reduction method in PWM AC–AC converter using modified Biogeography-Based Optimization Algorithm. Appl. Soft Comput. 2018, 73, 460–470. [Google Scholar] [CrossRef]
- Chaurasia, G.S.; Singh, A.K.; Agrawal, S.; Sharma, N. A meta-heuristic firefly algorithm based smart control strategy and analysis of a grid connected hybrid photovoltaic/wind distributed generation system. Sol. Energy 2017, 150, 265–274. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Padhan, S. A hybrid firefly algorithm and pattern search technique for automatic generation control of multi area power systems. Int. J. Electr. Power Energy Syst. 2015, 64, 9–23. [Google Scholar] [CrossRef]
- Yaghoobi, S.; Mojallali, H. Tuning of a PID controller using improved chaotic Krill Herd algorithm. Optik 2016, 127, 4803–4807. [Google Scholar] [CrossRef]
- Dubey, H.M.; Pandit, M.; Panigrahi, B. Hybrid flower pollination algorithm with time-varying fuzzy selection mechanism for wind integrated multi-objective dynamic economic dispatch. Renew. Energy 2015, 83, 188–202. [Google Scholar] [CrossRef]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A New MPPT Design Using Grey Wolf Optimization Technique for Photovoltaic System Under Partial Shading Conditions. IEEE Trans. Sustain. Energy 2016, 7, 181–188. [Google Scholar] [CrossRef]
- Hossain, M.A.; Ferdous, I. Autonomous robot path planning in dynamic environment using a new optimization technique inspired by bacterial foraging technique. Robot. Auton. Syst. 2015, 64, 137–141. [Google Scholar] [CrossRef]
- Zhao, J.; Lin, M.; Xu, D.; Hao, L.; Zhang, W. Vector Control of a Hybrid Axial Field Flux-Switching Permanent Magnet Machine Based on Particle Swarm Optimization. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Costa, B.L.G.; Bacon, V.D.; da Silva, S.A.O.; Angélico, B.A. Tuning of a PI-MR Controller Based on Differential Evolution Metaheuristic Applied to the Current Control Loop of a Shunt-APF. IEEE Trans. Ind. Electron. 2017, 64, 4751–4761. [Google Scholar] [CrossRef]
- Zhang, D.L.; Tang, Y.G.; Guan, X.P. Optimum Design of Fractional Order PID Controller for an AVR System Using an Improved Artificial Bee Colony Algorithm. Acta Autom. Sin. 2014, 40, 973–979. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Dhyani, A.; Panda, M.K.; Jha, B. Moth-Flame Optimization-Based Fuzzy-PID Controller for Optimal Control of Active Magnetic Bearing System. Iran. J. Sci. Technol. Trans. Electr. Eng. 2018, 42, 451–463. [Google Scholar] [CrossRef]
- Hasanien, H.M. Whale optimisation algorithm for automatic generation control of interconnected modern power systems including renewable energy sources. IET Gener. Transm. Distrib. 2018, 12, 607–614. [Google Scholar] [CrossRef]
- Yousri, D.; Allam, D.; Eteiba, M. Chaotic whale optimizer variants for parameters estimation of the chaotic behavior in Permanent Magnet Synchronous Motor. Appl. Soft Comput. 2019, 74, 479–503. [Google Scholar] [CrossRef]
- Ciabattoni, L.; Ferracuti, F.; Foresi, G.; Alessandro, F.; Monteriu, A.; Proietti, D.P. A robust and self-tuning speed control for permanent magnet synchronous motors via meta-heuristic optimization. Int. J. Adv. Manuf. Technol. 2018, 96, 1283–1292. [Google Scholar] [CrossRef]
- Fouad, A.; Gao, X.Z. A novel modified flower pollination algorithm for global optimization. Neural Comput. Appl. 2019, 31, 3875–3908. [Google Scholar] [CrossRef]
- Barr, R.S.; Golden, B.L.; Kelly, J.P.; Resende, M.G.C.; Stewart, W.R., Jr. Designing and reporting on computational experiments with heuristic methods. J. Heuristics 1995, 1, 9–32. [Google Scholar] [CrossRef]
- Eiben, A.E.; Jelasity, M. A critical note on experimental research methodology in EC. In Proceedings of the 2002 Congress on Evolutionary Computation, Honolulu, HI, USA, 12–17 May 2002; Volume 1, pp. 582–587. [Google Scholar]
- Derrac, J.; García, S.; Molina, D.; Herrera, F. A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms. Swarm Evol. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]
- Higgins, J. An Introduction to Modern Nonparametric Statistics; Duxbury Advanced Series; Brooks/Cole: London, UK, 2004. [Google Scholar]
- Glumineau, A.; Morales, J.D.L. Sensorless AC electric motor control, robust advanced design techniques and applications. In Advances in Industrial Control, 4th ed.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; Chapter 1.4; pp. 1–244. [Google Scholar]
- Wang, L.; Chai, S.; Yoo, D.; Gan, L.; Ng, K. PID and predictive control of electrical drives and power converters using MATLAB/simulink. In PID and Predictive Control of Electrical Drives and Power Converters Using MATLAB/Simulink; John Wiley and Sons: Hoboken, NJ, USA, 2015; Chapter 3.2; pp. 1–360. [Google Scholar]
- Diab, A.A.Z.; Rezk, H. Global MPPT based on flower pollination and differential evolution algorithms to mitigate partial shading in building integrated PV system. Sol. Energy 2017, 157, 171–186. [Google Scholar] [CrossRef]
- Kumar, V.; Gaur, P.; Mittal, A. ANN based self tuned PID like adaptive controller design for high performance PMSM position control. Expert Syst. Appl. 2014, 41, 7995–8002. [Google Scholar] [CrossRef]
- Premkumar, K.; Manikandan, B. Speed control of Brushless DC motor using bat algorithm optimized Adaptive Neuro-Fuzzy Inference System. Appl. Soft Comput. 2015, 32, 403–419. [Google Scholar] [CrossRef]
- Rajabioun, R. Cuckoo Optimization Algorithm. Appl. Soft Comput. 2011, 11, 5508–5518. [Google Scholar] [CrossRef]
- Mirjalili, S. Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural Comput. Appl. 2016, 27, 1053–1073. [Google Scholar] [CrossRef]
- Xin-She, Y. Flower Pollination Algorithm for Global Optimization. In International Conference on Unconventional Computing and Natural Computation; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7445, pp. 240–249. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl. Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Beltran-Carbajal, F.; Tapia-Olvera, R.; Lopez-Garcia, I.; Guillen, D. Adaptive dynamical tracking control under uncertainty of shunt DC motors. Electr. Power Syst. Res. 2018, 164, 70–78. [Google Scholar] [CrossRef]
- Beltran-Carbajal, F.; Valderrabano-Gonzalez, A.; Rosas-Caro, J.; Favela-Contreras, A. An asymptotic differentiation approach of signals in velocity tracking control of DC motors. Electr. Power Syst. Res. 2015, 122, 218–223. [Google Scholar] [CrossRef]
- Sheskin, D.J. Handbook of parametric and nonparametric statistical procedures. In Handbook of Parametric and Nonparametric Statistical Procedures, 5th ed.; CRC Press: Boca Raton, FL, USA, 2011; Chapter 6; pp. 1–1926. [Google Scholar]
- Friedman, M. A Comparison of Alternative Tests of Significance for the Problem of m Rankings. Ann. Math. Stat. 1940, 11, 86–92. [Google Scholar] [CrossRef]
- Zar, J.H. Biostatistical Analysis, 5th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2010; Chapter 5; pp. 1–960. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value |
|---|---|---|
| Inertia moment | J | × kg/m2 |
| Nominal voltage | v | 120 V |
| Rated current | 4 A | |
| Stator resistance | ||
| Stator inductance d | mH | |
| Stator inductance q | mH | |
| Stator dispersion inductance | 0.1 | |
| Magnetic flux | Wb | |
| Viscous friction coefficient | B | 1.0 × Nms |
| Direct current voltage bus | 250 V | |
| Pole pairs | 2 |
| Algorithm | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| CSA | WOA | MOA | DA | FPA | MOD-FPA | ||||||
| Parameter | Set | Parameter | Set | Parameter | Set | Parameter | Set | Parameter | Set | Parameter | Set |
| Max num iterations | 150 | Max num iterations | 150 | Max num iterations | 150 | Max num iterations | 150 | Max num iterations | 150 | Max num iterations | 150 |
| 0.25 | Pop. size | 50 | Pop. size | 50 | Pop. size | 50 | Pop. size | 50 | Pop. size | 50 | |
| 2.5 | p | 0.5 | b | 1 | 1.5 | P | 0.8 | P | 0.8 | ||
| 1.5 | b | 0.95 | 1.5 | 1.5 | |||||||
| Nests | 50 | linearly decreases | 2 to 0 | 1.5 | 2 | ||||||
| Algorithm | WOA | CSA | MOA | DA | FPA | MOD-FPA | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fmin | Time (s) | Fmin | Time (s) | Fmin | Time (s) | Fmin | Time (s) | Fmin | Time (s) | Fmin | Time (s) | |
| 1 | 22.6994 | 9.7629 | 12.6686 | 11.1216 | 16.1739 | 100.8926 | 12.1782 | 60.3278 | 19.4428 | 61.9032 | 13.1286 | 50.8423 |
| 2 | 24.6300 | 10.0120 | 13.3347 | 20.0250 | 16.0381 | 17.8061 | 12.6654 | 173.4184 | 17.5573 | 68.5206 | 12.1802 | 53.8376 |
| 3 | 24.1075 | 9.8840 | 13.8902 | 12.9715 | 15.1834 | 19.8049 | 12.2521 | 198.9473 | 14.3185 | 68.6631 | 12.9781 | 63.3364 |
| 4 | 31.9663 | 15.9494 | 14.2112 | 25.9766 | 15.0710 | 171.1894 | 12.4561 | 65.9023 | 18.3437 | 67.9709 | 13.9798 | 56.6246 |
| 5 | 26.0397 | 10.4179 | 12.3965 | 11.5067 | 15.6704 | 42.3323 | 12.3193 | 61.3436 | 17.1240 | 68.2875 | 12.2019 | 76.9480 |
| 6 | 24.2628 | 10.2366 | 13.4341 | 13.2358 | 15.0166 | 456.2442 | 12.1703 | 62.1292 | 17.2445 | 69.3678 | 15.4764 | 66.5200 |
| 7 | 25.0451 | 15.3526 | 13.2952 | 24.3957 | 15.0218 | 401.0097 | 12.2335 | 124.8784 | 17.0061 | 68.2612 | 11.7130 | 82.0027 |
| 8 | 25.1760 | 15.9661 | 13.3476 | 33.8889 | 15.1331 | 91.3249 | 12.3435 | 159.4066 | 15.3419 | 67.6977 | 12.0062 | 73.9802 |
| 9 | 23.4427 | 12.3607 | 12.7400 | 37.0928 | 15.0987 | 57.7924 | 12.2090 | 140.4617 | 15.9161 | 68.9211 | 14.0449 | 64.1778 |
| 10 | 23.0715 | 14.2450 | 12.5240 | 23.4901 | 15.9019 | 26.4847 | 12.1547 | 155.3517 | 19.1114 | 69.5845 | 12.2709 | 57.2700 |
| 11 | 25.7892 | 16.0392 | 12.2125 | 24.7140 | 15.8864 | 53.1811 | 12.2761 | 166.6872 | 17.6686 | 69.7636 | 11.6044 | 82.5346 |
| 12 | 24.5148 | 10.2259 | 12.2005 | 13.7651 | 16.0996 | 24.5379 | 12.4171 | 62.3930 | 18.6116 | 71.2002 | 11.9056 | 60.7460 |
| 13 | 20.0042 | 13.0276 | 13.2360 | 11.0687 | 15.8925 | 22.6724 | 12.1286 | 162.2462 | 18.7515 | 69.7693 | 13.6080 | 80.2960 |
| 14 | 23.7718 | 10.0917 | 12.7649 | 21.7170 | 15.2064 | 42.8231 | 12.1749 | 144.8146 | 15.7143 | 71.5348 | 12.9382 | 88.3238 |
| 15 | 23.8330 | 11.3413 | 12.2352 | 26.7393 | 15.1215 | 53.4467 | 12.2862 | 127.0251 | 17.7395 | 70.5596 | 11.6248 | 68.3444 |
| 16 | 23.4915 | 18.3564 | 13.5295 | 16.3069 | 15.9487 | 21.4712 | 12.4545 | 184.5878 | 16.8993 | 69.4661 | 15.4240 | 85.9715 |
| 17 | 19.9996 | 28.7599 | 14.8069 | 8.9223 | 16.1761 | 23.9274 | 12.1259 | 172.1421 | 16.2686 | 69.7409 | 11.9933 | 85.0920 |
| 18 | 24.4517 | 15.3679 | 14.1889 | 12.4056 | 15.1758 | 32.2807 | 12.1928 | 183.7906 | 16.6907 | 70.4172 | 13.1080 | 67.1999 |
| 19 | 23.2751 | 9.4537 | 13.2900 | 16.4322 | 15.5920 | 26.1728 | 12.1271 | 171.7891 | 17.3482 | 69.4995 | 12.7458 | 74.1920 |
| 20 | 29.2304 | 17.1070 | 12.6198 | 11.8579 | 15.0467 | 288.8992 | 12.3381 | 154.1914 | 15.9538 | 70.7724 | 14.6669 | 57.7763 |
| 21 | 22.8498 | 9.9913 | 13.0761 | 26.2660 | 15.1684 | 84.8600 | 12.2090 | 144.6471 | 17.4028 | 68.8338 | 13.4155 | 77.1744 |
| 22 | 22.7927 | 16.1717 | 12.2834 | 17.5838 | 16.2844 | 23.1870 | 12.2886 | 168.5149 | 17.6001 | 94.7242 | 11.7557 | 61.6966 |
| 23 | 25.7762 | 15.7192 | 14.6626 | 18.8585 | 15.4847 | 36.4363 | 12.5411 | 195.4198 | 15.9356 | 94.4562 | 12.6093 | 53.6038 |
| 24 | 22.1067 | 16.0310 | 12.5529 | 31.5798 | 15.0241 | 362.9245 | 12.2561 | 175.5576 | 16.2506 | 93.0406 | 11.7642 | 50.0331 |
| 25 | 24.4228 | 17.7745 | 13.3719 | 25.2745 | 15.0251 | 280.7601 | 12.4785 | 173.8678 | 15.9975 | 97.4004 | 12.7630 | 83.3687 |
| Minimum | 19.9996 | 9.4537 | 12.2005 | 8.9223 | 15.0166 | 17.8061 | 12.1259 | 60.3278 | 14.3185 | 61.9032 | 11.6044 | 50.0331 |
| Maximum | 31.9663 | 28.7599 | 14.8069 | 37.0928 | 16.2844 | 456.2442 | 12.6654 | 198.9473 | 19.4428 | 97.4004 | 15.4764 | 88.3238 |
| Average | 24.2700 | 13.9858 | 13.1549 | 19.8879 | 15.4976 | 110.4985 | 12.2911 | 143.5937 | 17.0496 | 73.2143 | 12.8763 | 68.8757 |
| Standard deviation | 2.4595 | 4.2957 | 0.7555 | 7.8228 | 0.4575 | 134.2499 | 0.1418 | 45.2255 | 1.2426 | 9.8454 | 1.1349 | 12.1583 |
| Variance | 6.0490 | 18.4526 | 0.5709 | 61.1955 | 0.2093 | 18,023.0341 | 0.0201 | 2045.3484 | 1.5442 | 96.9313 | 1.2881 | 147.8247 |
| Algorithm | |||||||
|---|---|---|---|---|---|---|---|
| CSA | 1.0262 | 8.8369 | 6.9248 | 23.4701 | 7.1267 | 2.2591 | 12.2005 |
| WOA | 0.1104 | 46.4259 | 62.3245 | 0.1756 | 47.8563 | 0.1756 | 19.9996 |
| MOA | 0.2727 | 97.3000 | 11.1623 | 25.1522 | 1.3187 | 18.6495 | 15.0166 |
| DA | 0.0411 | 17.1440 | 28.1149 | 7.1869 | 12.9935 | 5.0739 | 12.1259 |
| FPA | 1.5970 | 88.4017 | 23.5742 | 185.9878 | 74.7438 | 194.9891 | 14.3185 |
| MOD-FPA | 0.4004 | 70.8571 | 39.7645 | 207.3428 | 51.864 | 180.338 | 11.6044 |
| Algorithm | MSE | JISE | JIAE | JITSE | JITAE | Rise Time | Overshoot | Settling Time | Overall Error Rate | |
|---|---|---|---|---|---|---|---|---|---|---|
| MOA | 0.59069 | 0.11814 | 0.04121 | 0.00089 | 0.00042 | 0.00561 | 0.39198 | 0.01111 | 0.00005 | 1.1601 |
| FPA | 0.38809 | 0.07762 | 0.03409 | 0.00058 | 0.00037 | 0.00564 | 0.26066 | 0.01117 | 0.00001 | 0.77823 |
| WOA | 1.18869 | 0.23775 | 0.05967 | 0.00178 | 0.00065 | 0.00561 | 0.46571 | 0.01113 | 0.00003 | 1.97103 |
| DF | 0.55037 | 0.11008 | 0.0404 | 0.00083 | 0.00043 | 0.00562 | 0.33686 | 0.01115 | 0.00004 | 1.05577 |
| CSA | 0.48287 | 0.09658 | 0.03757 | 0.00073 | 0.00039 | 0.00562 | 0.33492 | 0.01114 | 0.00003 | 0.96986 |
| MOD-FPA | 0.18572 | 0.03715 | 0.02329 | 0.00028 | 0.00024 | 0.00564 | 0.20369 | 0.01117 | 0.00001 | 0.4672 |
| Algorithm | MSE | JISE | JIAE | JITSE | JITAE | Rise Time | Overshoot | Settling Time | Overall Error Rate | |
|---|---|---|---|---|---|---|---|---|---|---|
| MFA | 1.23729 | 0.24747 | 0.05894 | 0.00134 | 0.00044 | 0.00558 | 0.32295 | 0.01114 | 0.0002 | 2.66301 |
| FPA | 0.8914 | 0.17829 | 0.04805 | 0.00096 | 0.00035 | 0.00561 | 0.15897 | 0.01122 | 0.00005 | 1.91997 |
| WOA | 2.72607 | 0.54524 | 0.08411 | 0.00297 | 0.00062 | 0.00557 | 0.28417 | 0.0112 | 0.00015 | 5.29016 |
| DF | 1.22334 | 0.24468 | 0.05736 | 0.00133 | 0.00043 | 0.00564 | 0.23535 | 0.01119 | 0.00019 | 2.56649 |
| CSA | 1.0413 | 0.20827 | 0.05359 | 0.00113 | 0.0004 | 0.00559 | 0.25751 | 0.01117 | 0.00015 | 2.2548 |
| MOD-FPA | 0.40039 | 0.08008 | 0.03323 | 0.00043 | 0.00025 | 0.00562 | 0.15739 | 0.01119 | 0.00008 | 1.0014 |
| Algorithm | MSE | JISE | JIAE | JITSE | JITAE | Rise Time | Overshoot | Settling Time | Overall Error Rate | |
|---|---|---|---|---|---|---|---|---|---|---|
| MFA | 1.18804 | 0.23762 | 0.09067 | 0.01345 | 0.00574 | 0.00561 | 0.94610 | 0.01111 | 0.00009 | 3.40021 |
| FPA | 0.83917 | 0.16784 | 0.08446 | 0.01015 | 0.00589 | 0.00564 | 0.73195 | 0.01117 | 0.00071 | 2.55113 |
| WOA | 2.56335 | 0.5127 | 0.1477 | 0.03095 | 0.01029 | 0.00561 | 1.23909 | 0.01113 | 0.00123 | 5.70655 |
| DF | 1.15618 | 0.23125 | 0.09577 | 0.01364 | 0.00645 | 0.00562 | 0.85329 | 0.01115 | 0.00035 | 3.1855 |
| CSA | 0.99115 | 0.19824 | 0.08565 | 0.01144 | 0.00559 | 0.00562 | 0.82687 | 0.01114 | 0.00013 | 2.92222 |
| MOD-FPA | 0.38175 | 0.07635 | 0.05300 | 0.00441 | 0.00345 | 0.00564 | 0.54046 | 0.01117 | 0.00008 | 1.58563 |
| Algorithm | MSE | JISE | JIAE | JITSE | JITAE | Overall Error Rate | |
|---|---|---|---|---|---|---|---|
| MFA | 4.27836 | 0.85571 | 0.26784 | 0.09793 | 0.0272 | 0.66563 | 6.19267 |
| FPA | 3.22526 | 0.64509 | 0.24272 | 0.07169 | 0.0244 | 0.79300 | 5.00217 |
| WOA | 9.85985 | 1.97207 | 0.42451 | 0.21935 | 0.04269 | 1.39249 | 13.91096 |
| DF | 4.36026 | 0.8721 | 0.27866 | 0.09798 | 0.02811 | 0.85499 | 6.49211 |
| CSA | 3.65564 | 0.73117 | 0.25146 | 0.08294 | 0.02545 | 0.70312 | 5.44978 |
| MOD-FPA | 1.40489 | 0.28099 | 0.15569 | 0.03186 | 0.01576 | 0.43126 | 2.32046 |
| Algorithm | MSE | JISE | JIAE | JITSE | JITAE | Overall Error Rate | |
|---|---|---|---|---|---|---|---|
| MFA | 5.51743 | 1.10354 | 0.32558 | 0.09823 | 0.03218 | 0.31769 | 7.39465 |
| WOA | 3.91025 | 0.78209 | 0.2685 | 0.06973 | 0.0265 | 0.11209 | 5.16916 |
| FPA | 11.97204 | 2.39453 | 0.46988 | 0.21359 | 0.04639 | 0.20831 | 15.30475 |
| DF | 5.40697 | 1.08145 | 0.31817 | 0.09649 | 0.03142 | 0.00153 | 6.93602 |
| CSA | 4.62539 | 0.92512 | 0.29627 | 0.08248 | 0.02927 | 0.14116 | 6.09969 |
| MOD-FPA | 1.77692 | 0.3554 | 0.18368 | 0.03167 | 0.01814 | 0.09578 | 2.46159 |
| Algorithm | MSE | JISE | JIAE | JITSE | JITAE | Rise Time | Overshoot | Settling Time | Overall Error Rate | |
|---|---|---|---|---|---|---|---|---|---|---|
| MFA | 12.50636 | 5.62799 | 0.38234 | 1.25215 | 0.08207 | 0.00013 | 1.72334 | 0.0202 | 0.00054 | 23.25371 |
| FPA | 9.93659 | 4.47156 | 0.30742 | 1.00099 | 0.06584 | 0.00009 | 3.01638 | 0.02026 | 0.00291 | 21.73004 |
| WOA | 16.66305 | 7.49854 | 0.52442 | 1.65803 | 0.11185 | 0.00017 | 2.19356 | 0.02042 | 0.00511 | 30.78568 |
| DF | 10.90907 | 4.90919 | 0.3557 | 1.09617 | 0.07615 | 0.00012 | 0.96234 | 0.0202 | 0.00192 | 19.25247 |
| CSA | 10.72061 | 4.82438 | 0.33895 | 10.77787 | 0.07271 | 0.00012 | 1.1434 | 0.02019 | 0.00091 | 28.99652 |
| MOD-FPA | 7.32725 | 3.29734 | 0.21939 | 0.74688 | 0.04731 | 0.00007 | 3.08115 | 0.02019 | 0.00053 | 17.71227 |
| Algorithm | MSE | JISE | JIAE | JITSE | JITAE | Rise Time | Overshoot | Settling Time | Overall Error Rate | |
|---|---|---|---|---|---|---|---|---|---|---|
| MFA | 17.27716 | 7.7749 | 0.4593 | 1.90973 | 0.0988 | 0.00013 | 13.86177 | 0.02048 | 0.00069 | 54.8034 |
| FPA | 14.42528 | 6.49152 | 0.39242 | 1.59971 | 0.0843 | 0.0001 | 17.99874 | 0.0205 | 0.00296 | 58.41653 |
| WOA | 23.51284 | 10.58101 | 0.64259 | 2.5873 | 0.13753 | 0.00017 | 15.58144 | 0.02063 | 0.00526 | 68.12983 |
| DF | 14.53939 | 6.54287 | 0.40931 | 1.61197 | 0.08779 | 0.00012 | 10.31931 | 0.0204 | 0.00208 | 43.50611 |
| CSA | 14.51638 | 6.53252 | 0.39766 | 1.60957 | 0.08546 | 0.00011 | 11.85184 | 0.0204 | 0.00103 | 46.47098 |
| MOD-FPA | 10.66016 | 4.79718 | 0.28254 | 1.19076 | 0.06102 | 0.00008 | 18.23277 | 0.02037 | 0.00059 | 52.87439 |
| Algorithm | MSE | JISE | JIAE | JITSE | JITAE | Rise Time | Overshoot | Settling Time | Overall Error Rate | |
|---|---|---|---|---|---|---|---|---|---|---|
| MFA | 28.49916 | 12.82491 | 1.03495 | 4.22236 | 0.22567 | 0.00052 | 3.73184 | 0.02506 | 0.00153 | 16.95471 |
| FPA | 21.58834 | 9.71497 | 0.79872 | 3.20608 | 0.17419 | 0.00039 | 2.05505 | 0.02182 | 0.00929 | 11.35382 |
| WOA | 37.43438 | 16.84584 | 1.3628 | 5.53542 | 0.29695 | 0.00068 | 3.32796 | 0.0261 | 0.01558 | 19.17052 |
| DF | 25.47986 | 11.46619 | 0.95456 | 3.77837 | 0.20813 | 0.00049 | 2.7343 | 0.02389 | 0.00584 | 14.01472 |
| CSA | 24.74792 | 11.13681 | 0.91795 | 3.67089 | 0.20018 | 0.00046 | 2.98296 | 0.02406 | 0.00268 | 14.24489 |
| MOD-FPA | 15.85082 | 7.13303 | 0.58644 | 2.36369 | 0.12806 | 0.00029 | 1.99922 | 0.02047 | 0.00165 | 9.30956 |
| Algorithm | MSE | JISE | JIAE | JITSE | JITAE | Rise Time | Overshoot | Settling Time | Overall Error Rate | |
|---|---|---|---|---|---|---|---|---|---|---|
| MFA | 34.01983 | 15.30926 | 1.26848 | 4.69363 | 0.27648 | 0.00052 | 4.72747 | 0.02600 | 0.00174 | 64.88439 |
| FPA | 26.57352 | 11.95835 | 0.98649 | 3.67106 | 0.21501 | 0.00039 | 2.82158 | 0.02316 | 0.01085 | 48.97353 |
| WOA | 45.17517 | 20.32928 | 1.67679 | 6.22424 | 0.36527 | 0.00068 | 4.29291 | 0.02740 | 0.01782 | 82.23961 |
| DF | 29.75036 | 13.38796 | 1.15716 | 4.10735 | 0.2522 | 0.0005 | 3.36452 | 0.02507 | 0.00674 | 55.29176 |
| CSA | 29.17462 | 13.12887 | 1.11698 | 4.02846 | 0.24348 | 0.00047 | 3.70605 | 0.02512 | 0.00307 | 54.99965 |
| MOD-FPA | 19.56057 | 8.80245 | 0.72501 | 2.70932 | 0.15818 | 0.00028 | 2.78621 | 0.02228 | 0.00192 | 37.45108 |
| MOD-FPA | WOA | CSA | MOA | DA | FPA |
|---|---|---|---|---|---|
| Wins (+) | 25 | 17 | 24 | 10 | 25 |
| Loses (−) | 0 | 8 | 1 | 15 | 0 |
| Comparison | R+ | R− | p-Value | Conclusions |
|---|---|---|---|---|
| MOD-FPA VS WOA | 0 | 325 | Reject the null hypothesis | |
| MOD-FPA VS CSA | 106 | 219 | Retain de null hypothesis | |
| MOD-FPA VS MOA | 2 | 323 | Reject the null hypothesis | |
| MOD-FPA VS DA | 240 | 85 | Reject the null hypothesis | |
| MOD-FPA VS FPA | 0 | 325 | Reject the null hypothesis |
| P = 0.000 | ||
|---|---|---|
| Treatment | Median | Sum of Ranks |
| WOA | 24.083 | 150 |
| CSA | 13.226 | 63 |
| DA | 12.37 | 39 |
| FPA | 17.073 | 124 |
| MOA | 15.531 | 100 |
| MOD-FPA | 12.734 | 49 |
| Comparison | Difference in Rank Sum (DRS) | Standard Error (SE) | DRS/SE | Critical Q Value at 0.05 Level | Conclusions |
|---|---|---|---|---|---|
| WOA VS CSA | 2171 | 217.22684 | 9.99416094 | 3.658 | Reject the null hypothesis |
| WOA VS MOA | 1206 | 217.22684 | 5.55180014 | 3.658 | Reject the null hypothesis |
| WOA VS DA | 2810 | 217.22684 | 12.9357864 | 3.658 | Reject the null hypothesis |
| WOA VS FPA | 702 | 217.22684 | 3.23164486 | 3.658 | Retain de null hypothesis |
| WOA VS MOD-FPA | 2486 | 217.22684 | 11.444258 | 3.658 | Reject the null hypothesis |
| CSA VS MOD-FPA | −965 | 217.22684 | −4.4423608 | 3.658 | Retain de null hypothesis |
| CSA VS DA | 639 | 217.22684 | 2.94162545 | 3.658 | Retain de null hypothesis |
| CSA VS FPA | −1469 | 217.22684 | −6.7625161 | 3.658 | Retain de null hypothesis |
| CSA VS MOD-FPA | 315 | 217.22684 | 1.45009705 | 3.658 | Retain de null hypothesis |
| MOA VS DA | 1604 | 217.22684 | 7.38398625 | 3.658 | Reject the null hypothesis |
| MOA VS FPA | −504 | 217.22684 | −2.3201553 | 3.658 | Retain de null hypothesis |
| MOA VS MOD-FPA | 1280 | 217.22684 | 5.89245786 | 3.658 | Reject the null hypothesis |
| DA VS FPA | −2108 | 217.22684 | −9.7041415 | 3.658 | Retain de null hypothesis |
| DA VS MOD-FPA | −324 | 217.22684 | −1.4915284 | 3.658 | Retain de null hypothesis |
| FPA VS MOD-FPA | 1784 | 217.22684 | 8.21261314 | 3.658 | Reject the null hypothesis |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aguilar-Mejía, O.; Minor-Popocatl, H.; Tapia-Olvera, R. Comparison and Ranking of Metaheuristic Techniques for Optimization of PI Controllers in a Machine Drive System. Appl. Sci. 2020, 10, 6592. https://doi.org/10.3390/app10186592
Aguilar-Mejía O, Minor-Popocatl H, Tapia-Olvera R. Comparison and Ranking of Metaheuristic Techniques for Optimization of PI Controllers in a Machine Drive System. Applied Sciences. 2020; 10(18):6592. https://doi.org/10.3390/app10186592
Chicago/Turabian StyleAguilar-Mejía, Omar, Hertwin Minor-Popocatl, and Ruben Tapia-Olvera. 2020. "Comparison and Ranking of Metaheuristic Techniques for Optimization of PI Controllers in a Machine Drive System" Applied Sciences 10, no. 18: 6592. https://doi.org/10.3390/app10186592
APA StyleAguilar-Mejía, O., Minor-Popocatl, H., & Tapia-Olvera, R. (2020). Comparison and Ranking of Metaheuristic Techniques for Optimization of PI Controllers in a Machine Drive System. Applied Sciences, 10(18), 6592. https://doi.org/10.3390/app10186592