Model Predictive Control of Grid Forming Converters with Enhanced Power Quality

 ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
- Propose a new term in the CF, resulting in less computation and higher power quality compared to the traditional schemes.
- Address the suitability of different frequency control strategies such as Simple Penalization (SP), Notch filter (N), and Periodic control (P) combined with the new improved algorithm (IMPC).
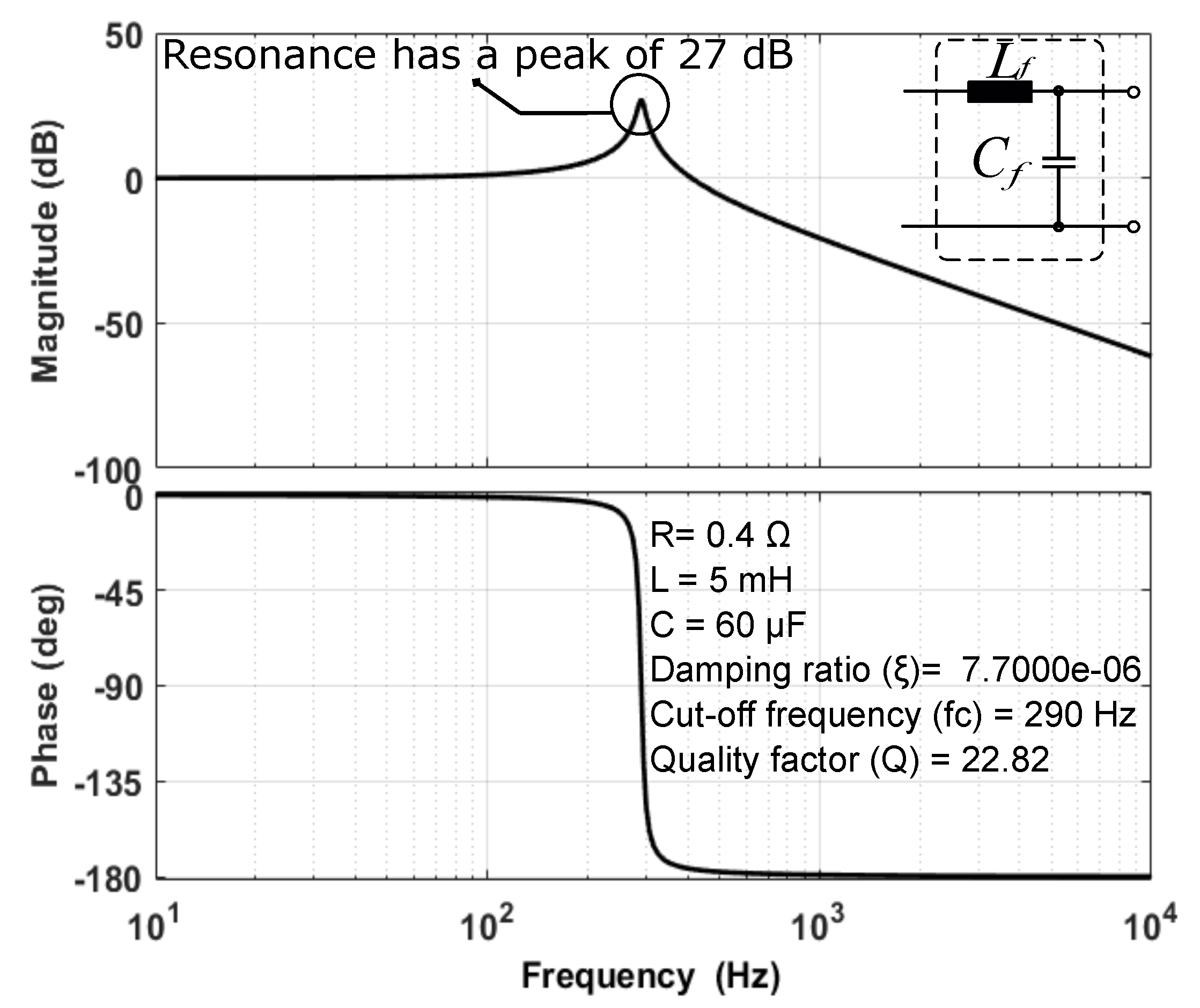
- Discusses the suitable size of LC filter that can be associated with the converter when the above-mentioned frequency control strategies are used with IMPC and CMPC algorithms.
- Address the proper selection of sampling time for all conventional (CMPC) and improved (IMPC) algorithms.
- Shed light on many aspects such as spectrum analysis, steady-state operation, transient operation, power quality and factors tuning for eight different predictive schemes such as CMPC, IMPC, SP-CMPC, SP-IMPC, N-CMPC, N-IMPC, P-CMPC, and P-IMPC.
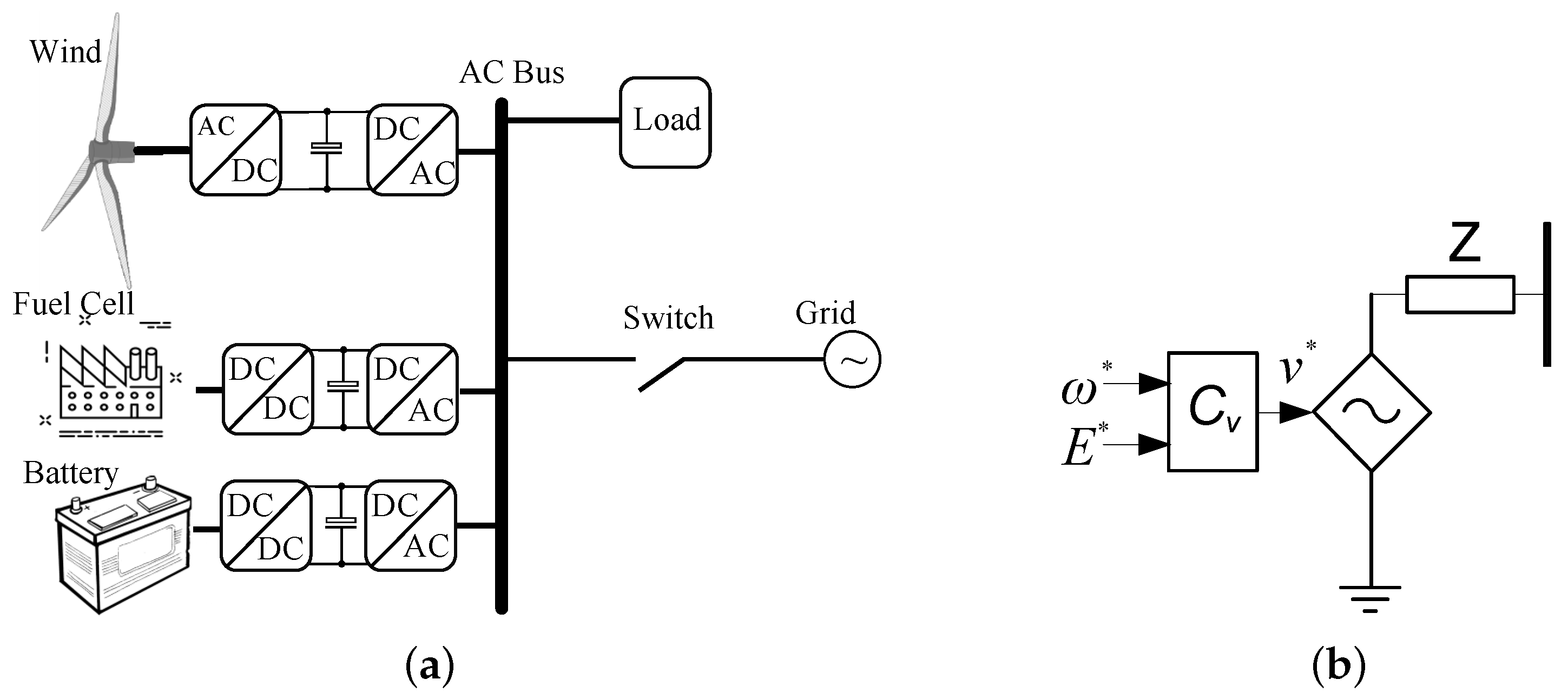
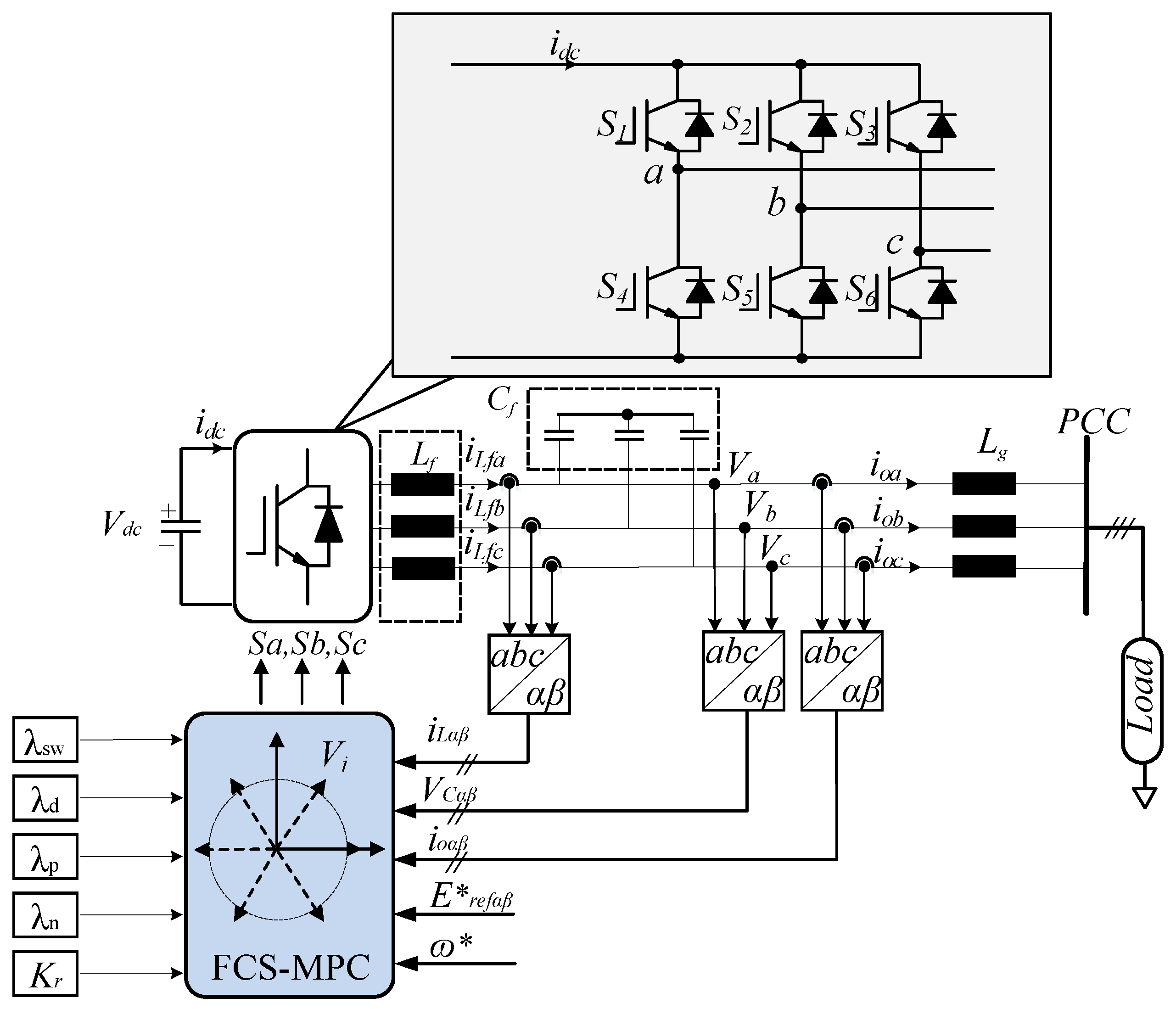
2. Converter Model and System Description
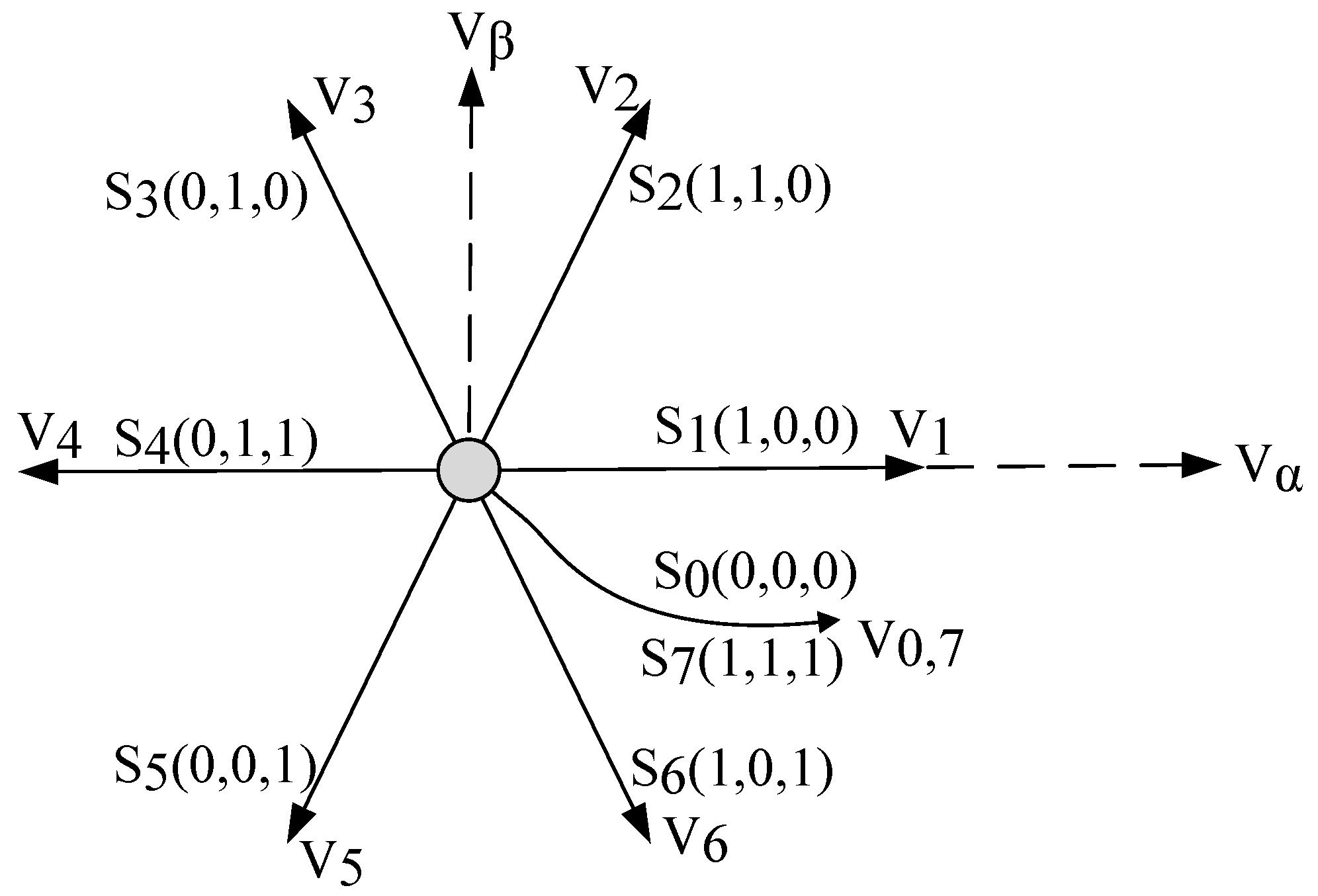
2.1. Converter Model
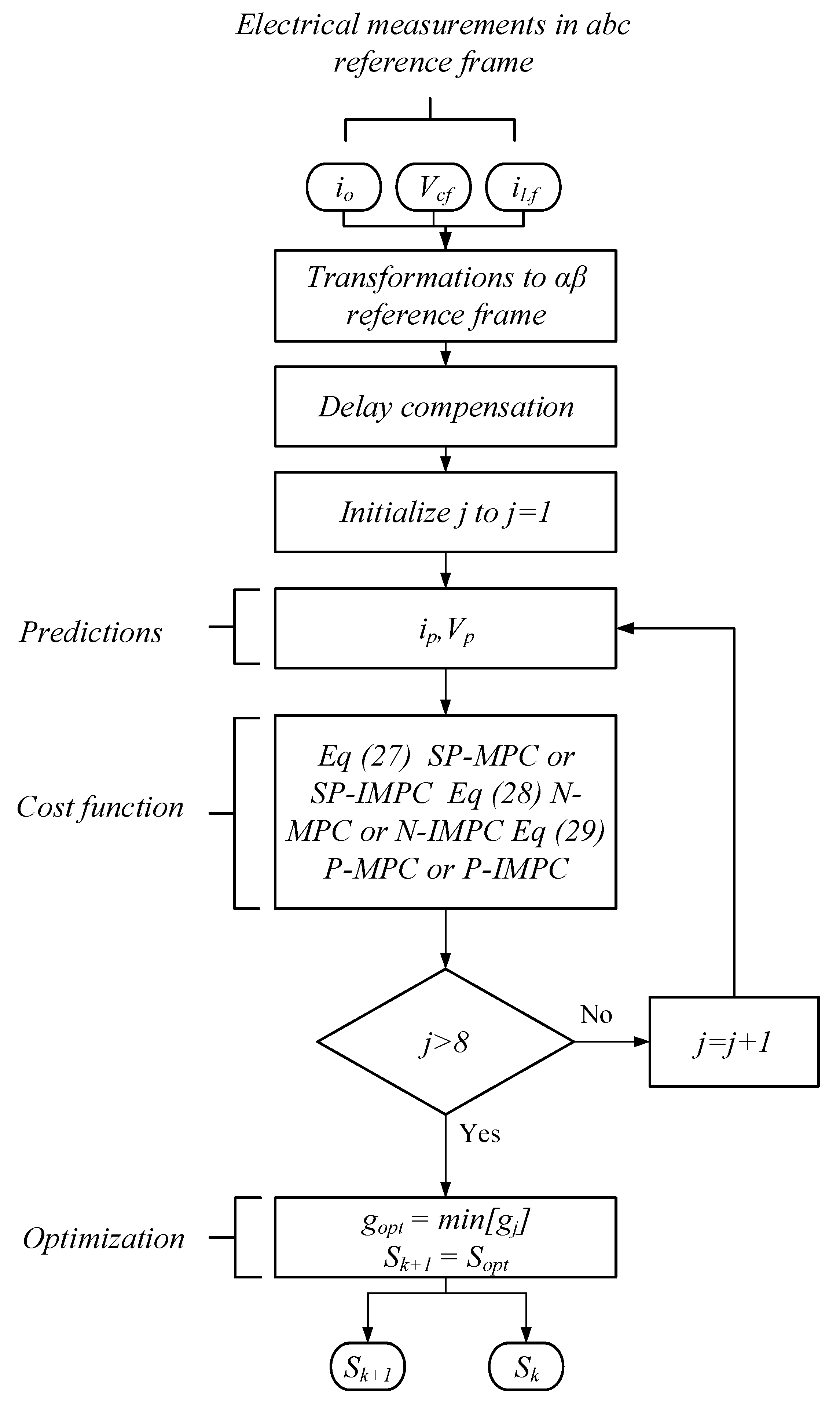
2.2. Conventional FCS-MPC Scheme for Voltage Regulation
2.3. Proposed FCS-MPC Scheme
3. Frequency Control
3.1. Simple Penalization
3.2. Notch Filter
3.3. Periodic Control
4. Results and Discussion
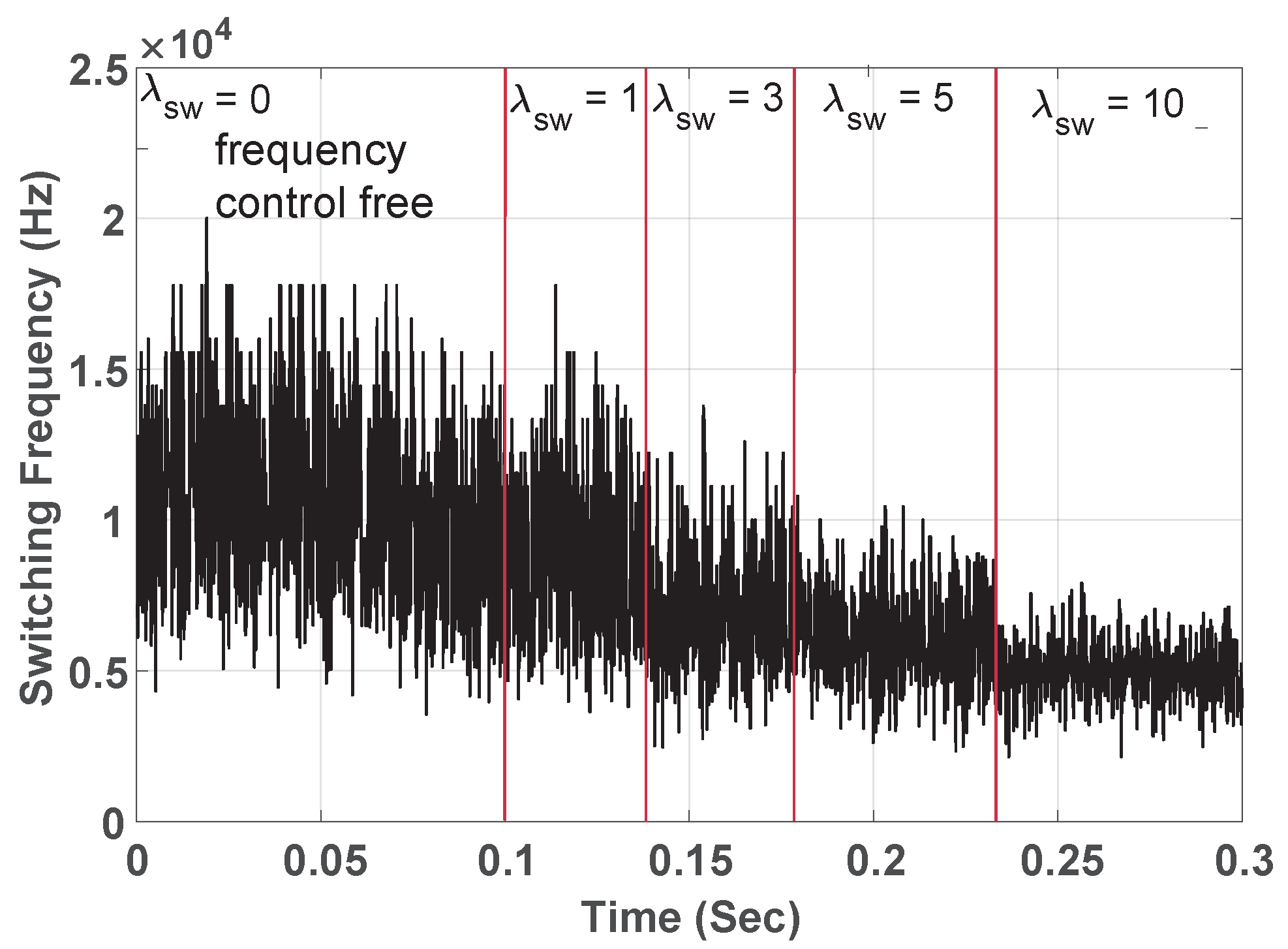
4.1. Spectrum Analysis
- □
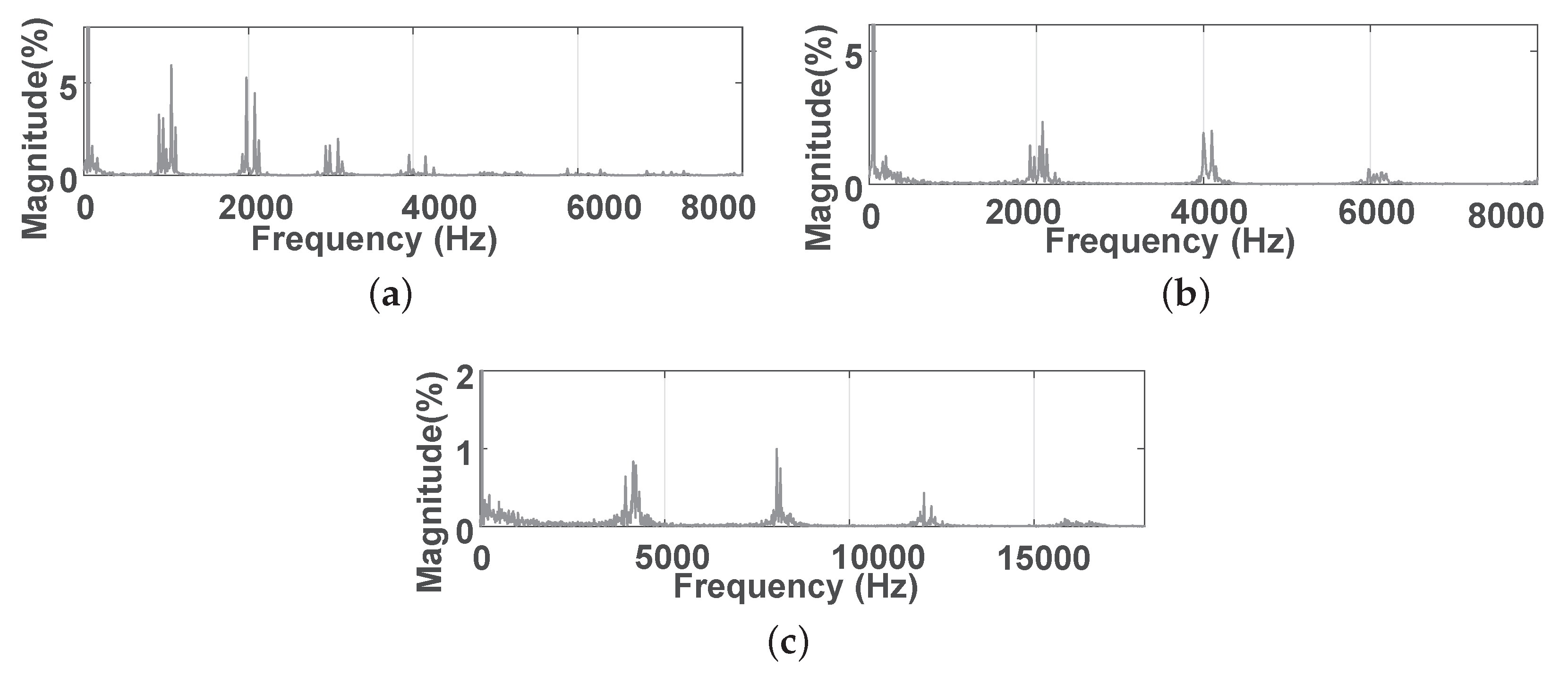
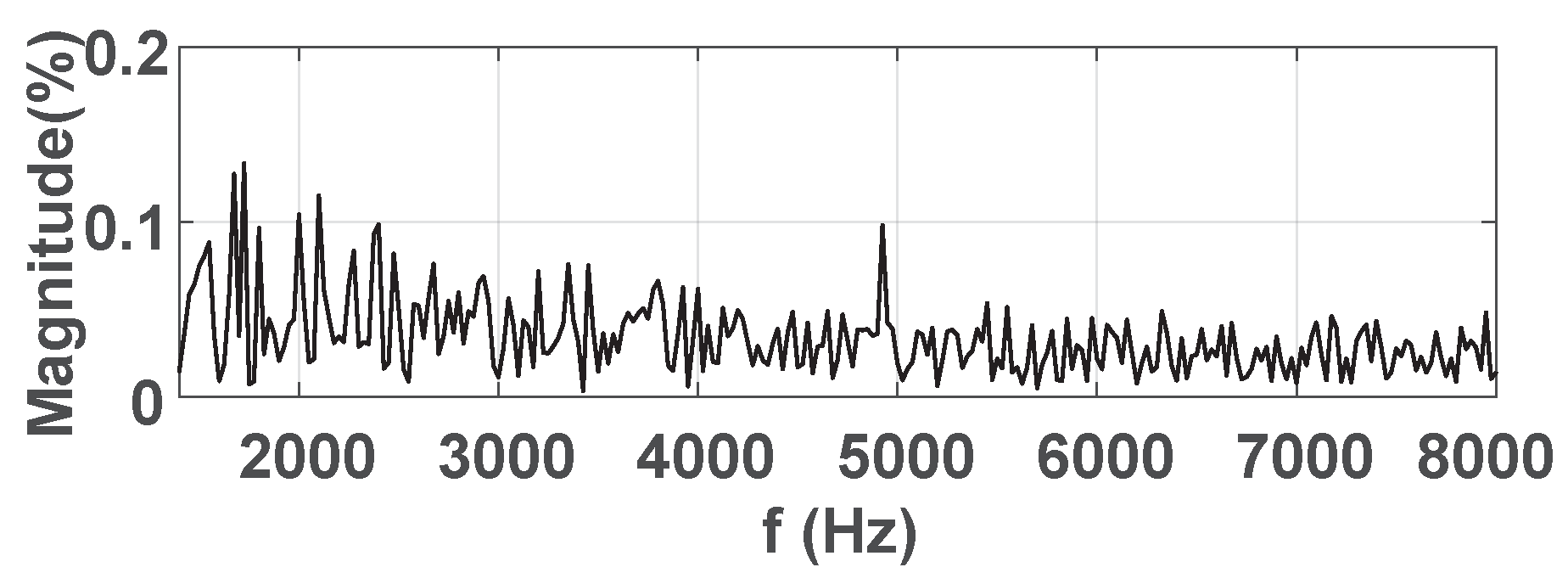
- In Figure 9, the switching frequency fixed behaviour is obtained successfully by the periodic control technique. In case of having no control over the switching frequency, both conventional and improved FCS-MPC have high switching fluctuations. Thus, the output voltage and current harmonics are spread to a wide range of frequencies, as shown in Figure 10.
- □
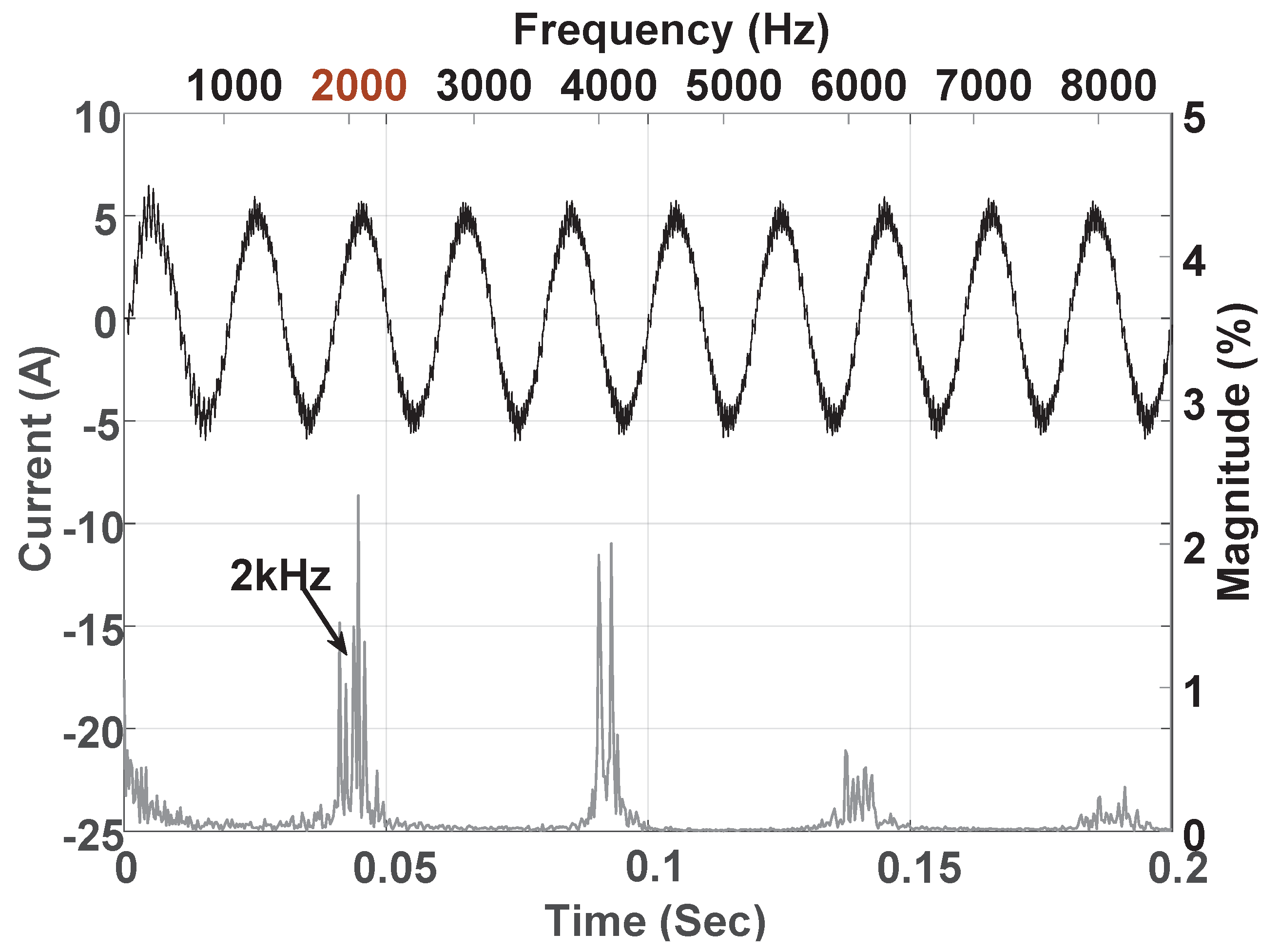
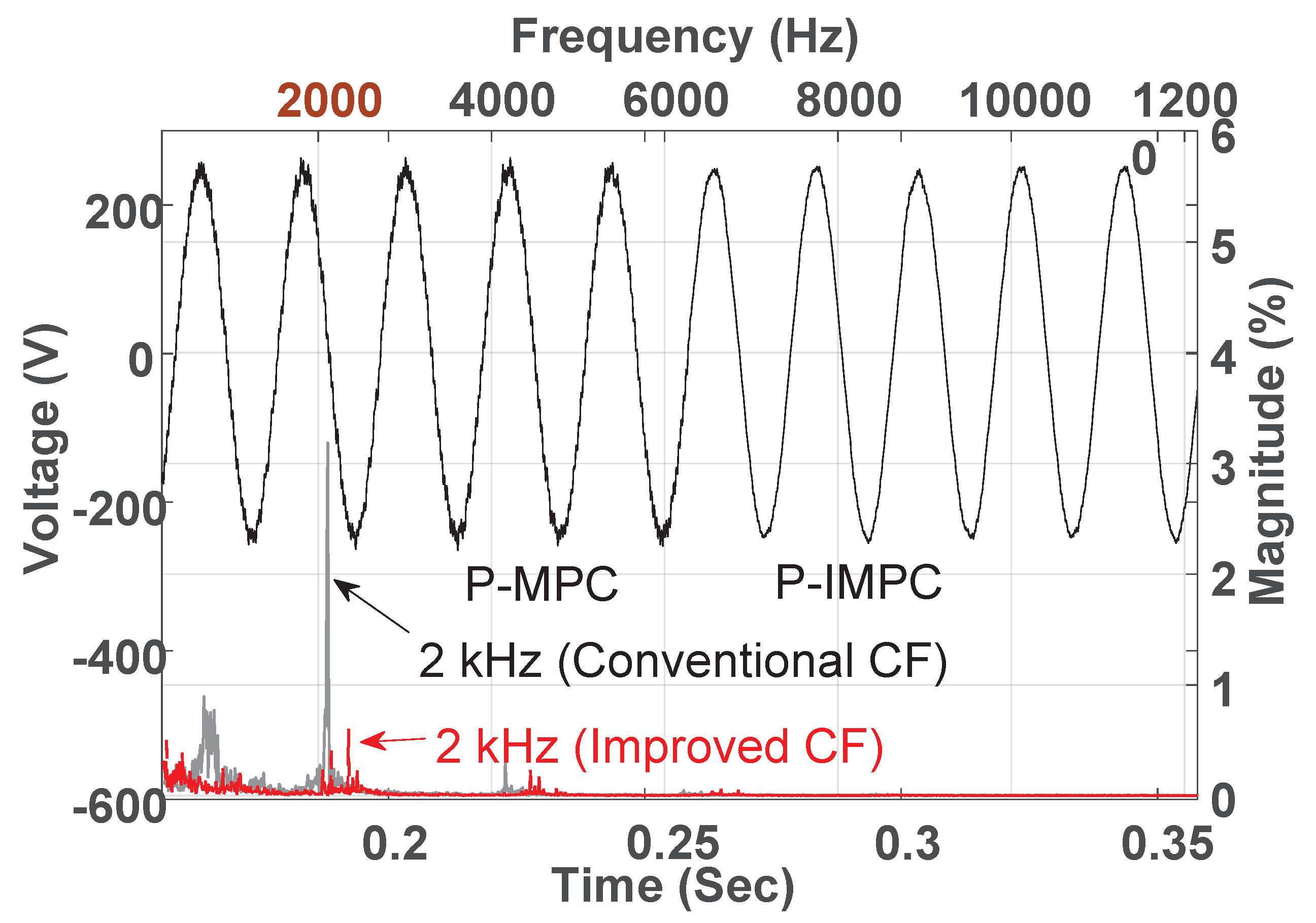
- Figure 11 shows the output current spectrum on phase (a) following a reference frequency of 2 kHz using P-CMPC strategy. Here, it can be seen clearly that the output spectrum presents a similar behaviour as the one achieved with using a modulator. In Figure 12, P-IMPC has a magnitude’s reduction in the output spectrum, which is resulting in a higher power quality than the P-CMPC as it is shown in the time between 0.26 s and 0.36 s.
- □
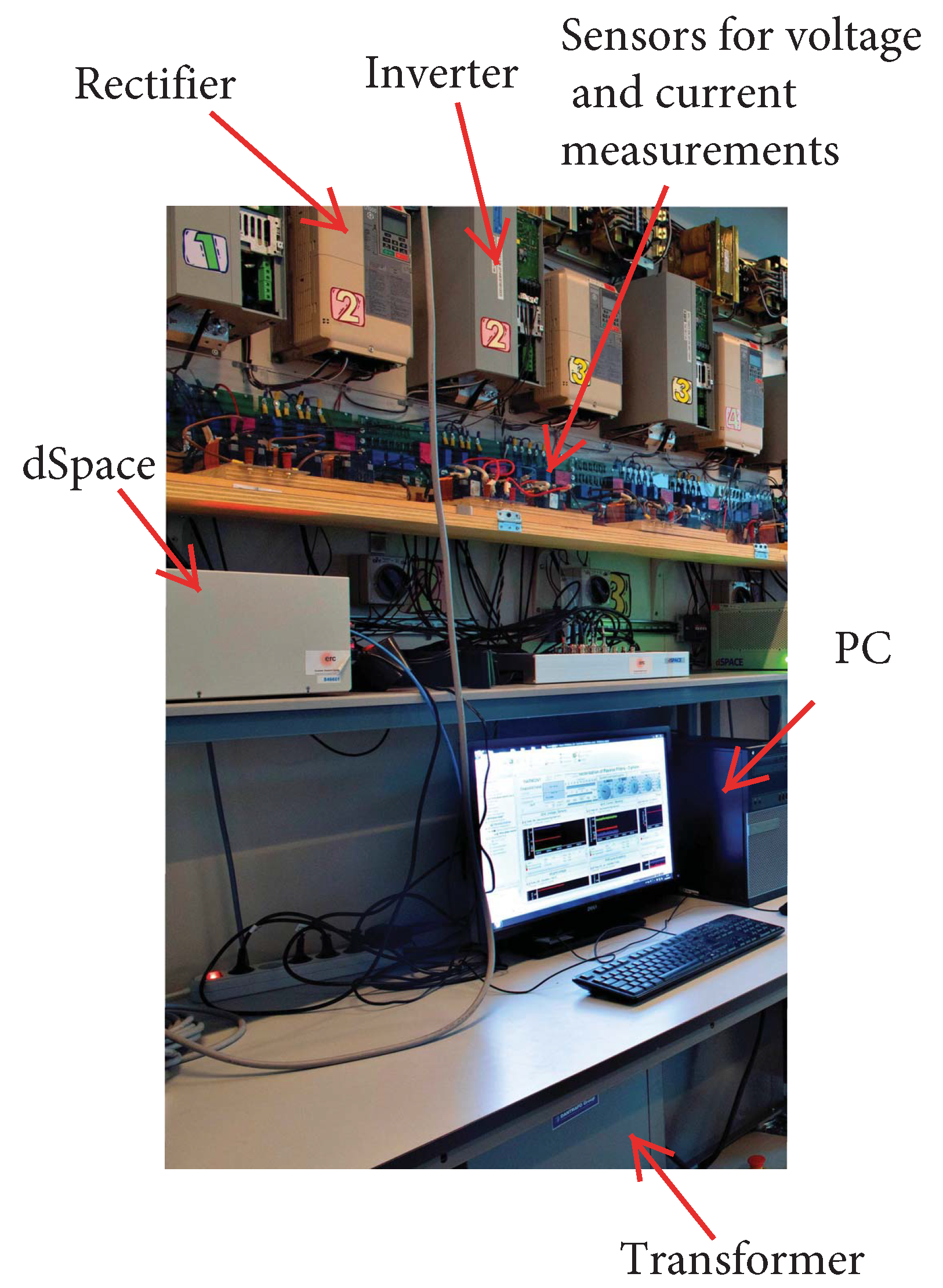
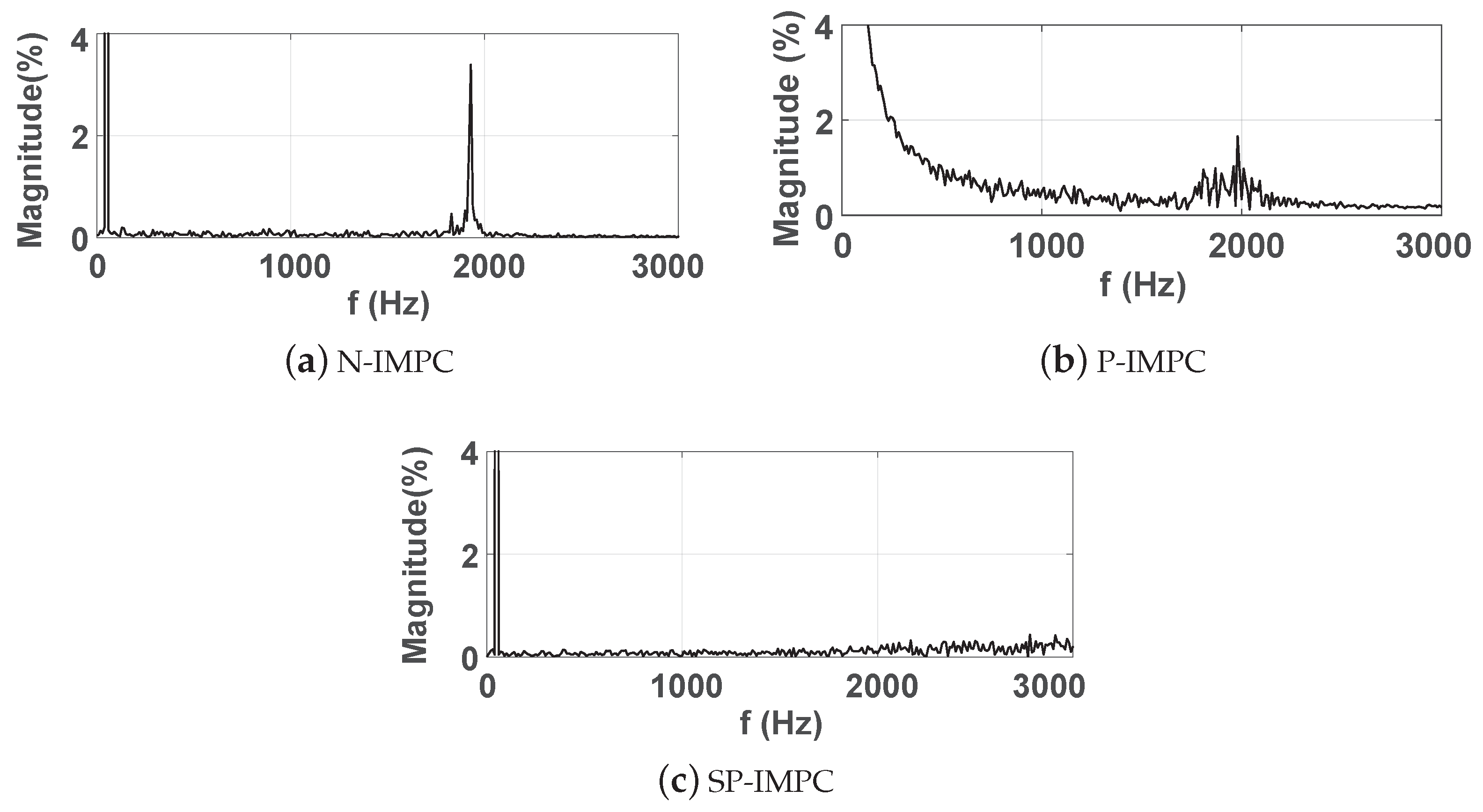
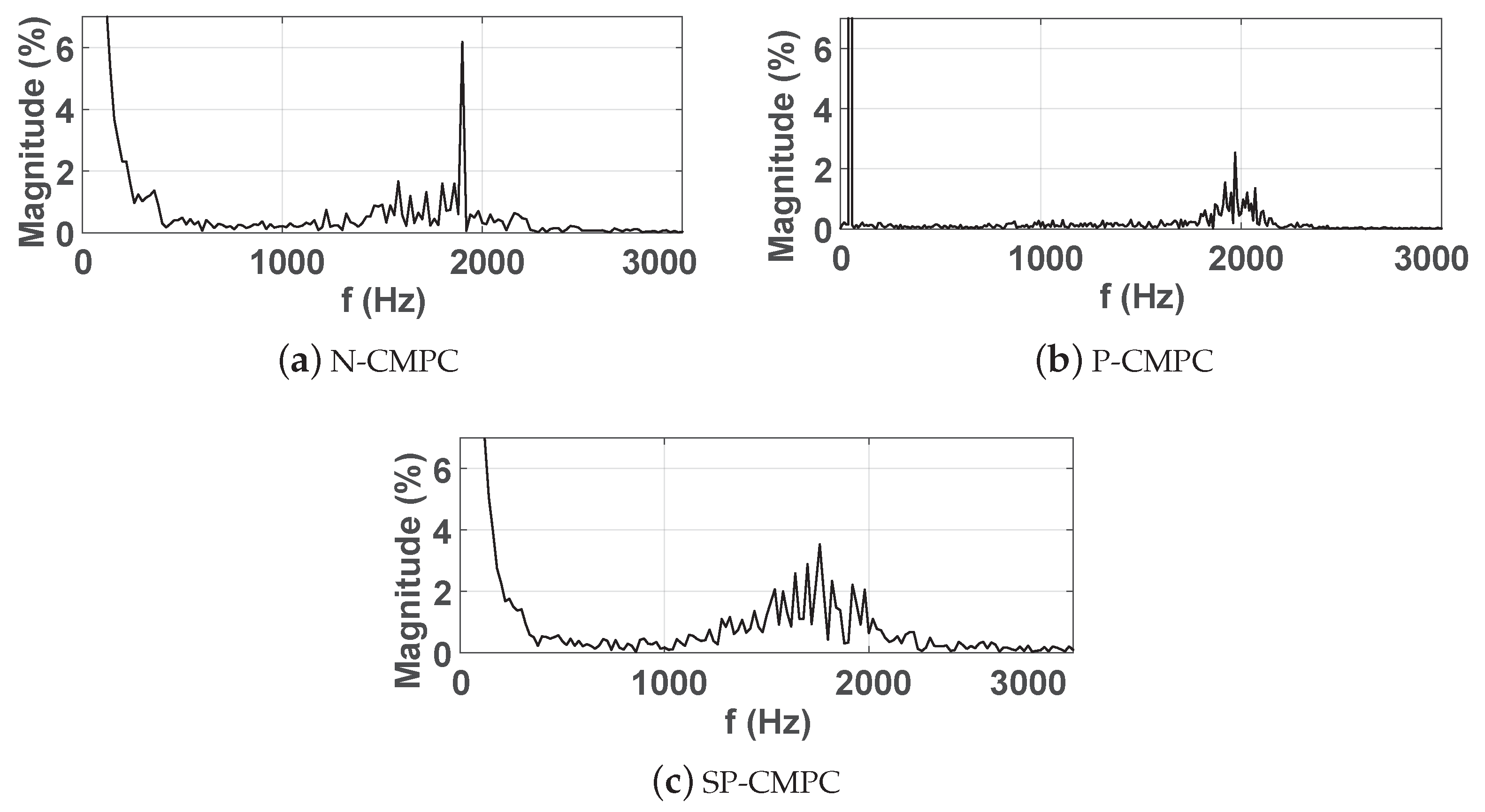
- A series of tests were performed on all algorithms to compare the spectrum performance of each method using the experimental setup. That can be verified in Figure 13 and Figure 14. It can be concluded from the figures that N-IMPC and N-CMPC have higher spectrum magnitude than the P-CMPC and P-IMPC. It can be seen also that it is difficult to keep the spectrum magnitude at the desired frequency in case of using SP-IMPC. Bearing in mind that the SP-CMPC can not be operating at exactly 2 kHz. All these findings make P-IMPC the best algorithm, among the discussed ones in this paper, in terms of fixed switching frequency while providing high power quality. In addition, it is easy to obtain the reference switching frequency and follow it accurately. Table 2 summarizes the THDv for each method utilizing the same LC filter design. It can be concluded that periodic control has a better THDv in both the conventional and improved FCS-MPC.
- □
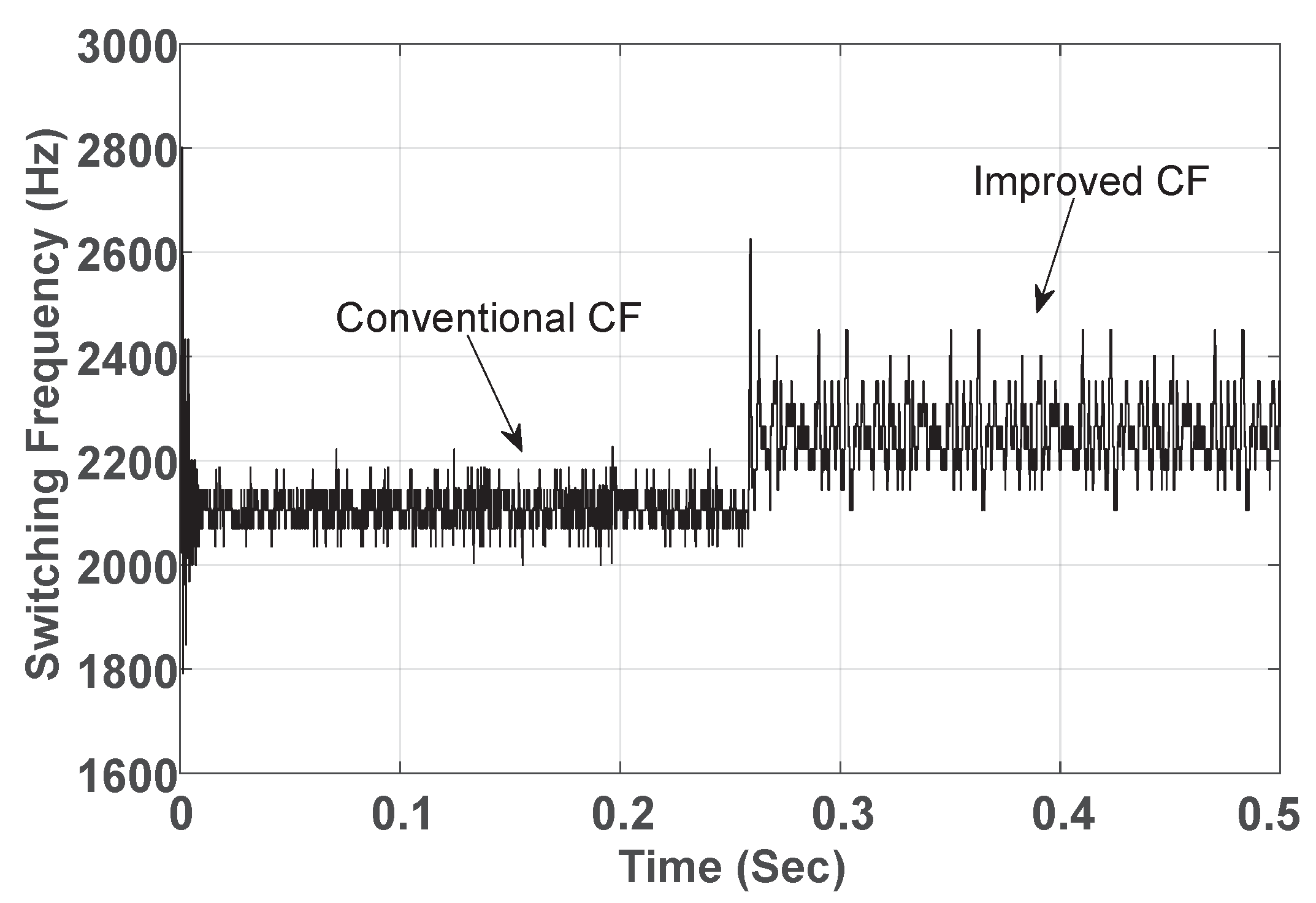
- Figure 15 shows the measured switching frequency in cases where using the P-CMPC and P-IMPC as discussed in Equation (29). It depicts that in P-IMPC, the deviation from the reference is a little higher compared to the conventional P-CMPC, and the reason is that the weighting factors for both tests, in this case, were kept constant. That was to illustrate the effect of using the same weighting factors for both algorithms.
- □
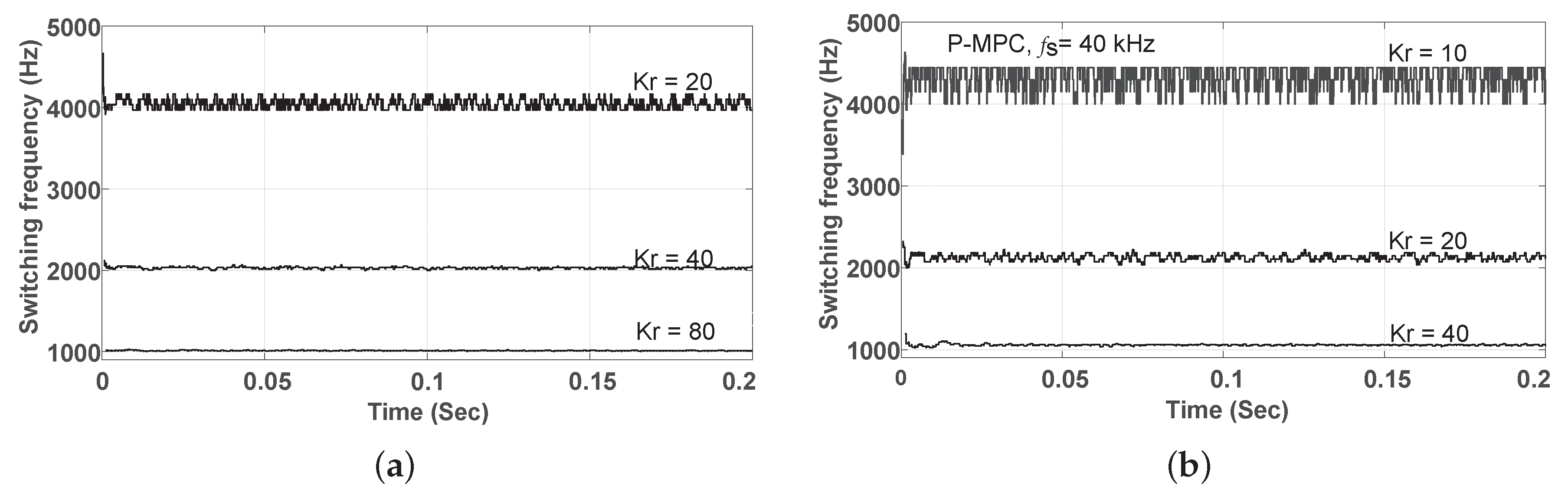
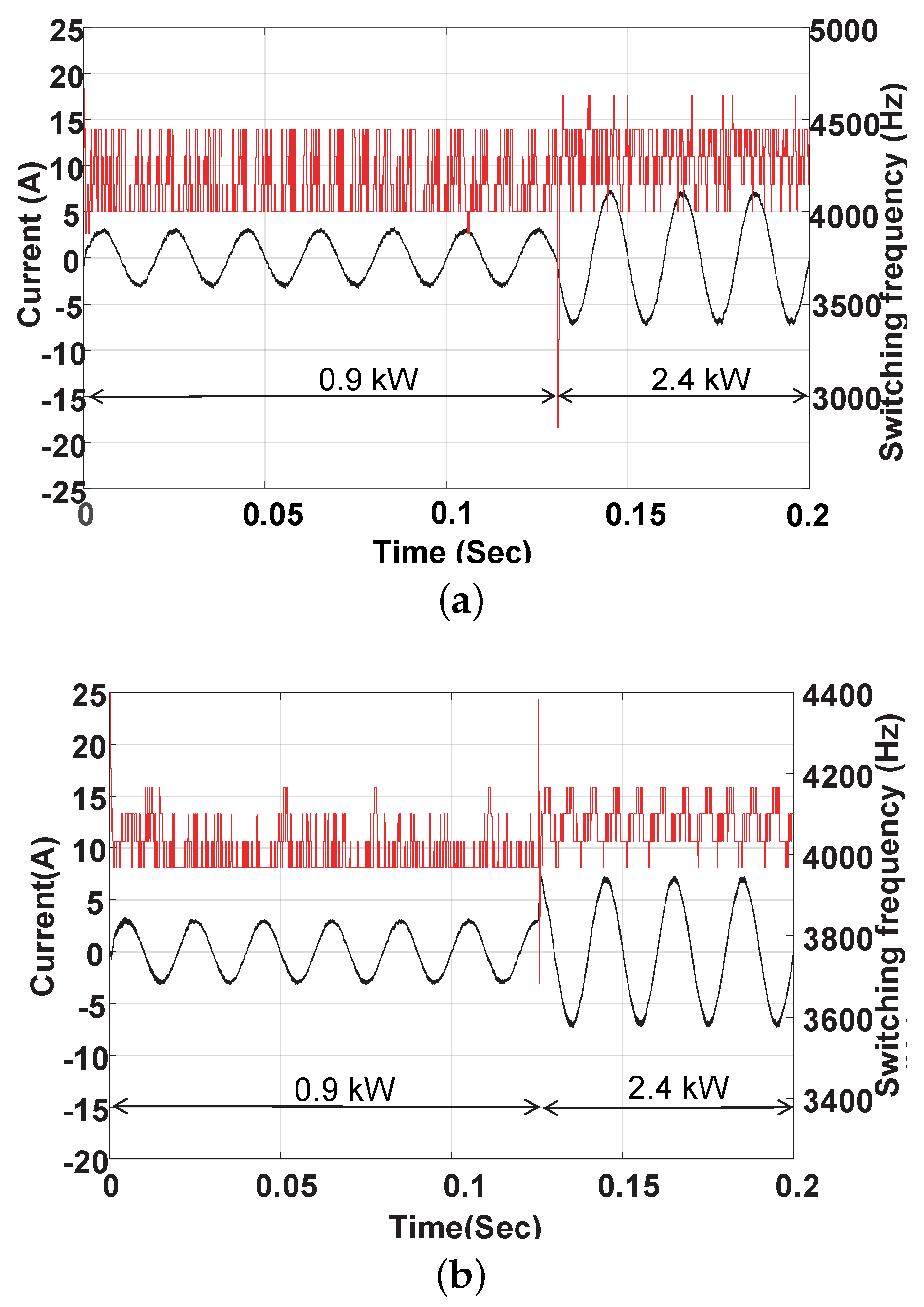
- Figure 16a,b show two important aspects. Firstly, they show how the periodic control strategy follows the different references resulting in a fixed switching frequency. Secondly, they show the effect of samplings, which indicates that P-CMPC and P-IMPC are using high sampling frequency to give better fixed switching frequency performance.
4.2. Dynamic Response
4.3. Sampling Effect
4.4. Steady-State Operation
4.5. Factor weights
5. Conclusions
- □
- Weight factors tuning, which affects the performance of the power converter. This challenge solved by defining the importance of each objective in multi-objective CF.
- □
- Another challenge was to include the most suitable frequency control objectives without using a modulator and send the optimized actuation based on the error evaluated by the CF. This challenge has been solved by investigating the performance of each frequency control scheme combined with the improved FCS-MPC.
- □
- High-frequency sampling, which is solved by concentrating the switching frequency at a relatively lower frequency. That allowed the standard setups to handling this kind of controllers.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| FCS | Finite control set |
| MPC | Model predictive control |
| CMPC | Conventional model predictive control |
| CHP | Combined heat and power |
| CF | Cost function |
| SP | Simple penalization |
| N | Notch control |
| IMPC | Improved model predictive control |
| P | Periodic control |
| THDv | Total harmonics distortion voltage |
| Periodic weighting factor | |
| Inductor and capacitor filter | |
| Ts | Sampling time |
| Vcf | Capacitor voltage |
| io | Inductor current |
| Notch weighting factor | |
| Simple penalization weighting factor |
References
- Rahman, M.S.; Hossain, M.J.; Lu, J.; Pota, H.R. A Need-Based Distributed Coordination Strategy for EV Storages in a Commercial Hybrid AC/DC Microgrid With an Improved Interlinking Converter Control Topology. IEEE Trans. Energy Convers. 2018, 33, 1372–1383. [Google Scholar] [CrossRef]
- Khalili, T.; Hagh, M.T.; Zadeh, S.G.; Maleki, S. Optimal reliable and resilient construction of dynamic self-adequate multi-microgrids under large-scale events. IET Renew. Power Gener. 2019, 13, 1750–1760. [Google Scholar] [CrossRef]
- Peyghami, S.; Mokhtari, H.; Davari, P.; Loh, P.C.; Blaabjerg, F. On Secondary Control Approaches for Voltage Regulation in DC Microgrids. IEEE Trans. Ind. Appl. 2017, 53, 4855–4862. [Google Scholar] [CrossRef]
- Peyghami, S.; Mokhtari, H.; Loh, P.C.; Davari, P.; Blaabjerg, F. Distributed Primary and Secondary Power Sharing in a Droop-Controlled LVDC Microgrid With Merged AC and DC Characteristics. IEEE Trans. Smart Grid 2018, 9, 1949–3053. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Z.; Liu, J.; Liu, B.; Meng, X.; An, R. Modeling and analysis of droop based hybrid control strategy for parallel inverters in islanded microgrids. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 3462–3469. [Google Scholar] [CrossRef]
- Chen, Z.; Pei, X.; Yang, M.; Peng, L. An Adaptive Virtual Resistor (AVR) Control Strategy for Low-Voltage Parallel Inverters. IEEE Trans. Power Electron. 2018, 34, 863–876. [Google Scholar] [CrossRef]
- Hou, X.; Sun, Y.; Lu, J.; Zhang, X.; Koh, L.H.; Su, M.; Guerrero, J.M. Distributed Hierarchical Control of AC Microgrid Operating in Grid-Connected, Islanded and Their Transition Modes. IEEE Access 2018, 6, 77388–77401. [Google Scholar] [CrossRef]
- Wang, J.; Jin, C.; Wang, P. A Uniform Control Strategy for the Interlinking Converter in Hierarchical Controlled Hybrid AC/DC Microgrids. IEEE Trans. Ind. Electron. 2017, 65, 6188–6197. [Google Scholar] [CrossRef]
- Davari, P.; Yang, Y.; Zare, F.; Blaabjerg, F. Predictive Pulse-Pattern Current Modulation Scheme for Harmonic Reduction in Three-Phase Multidrive Systems. IEEE Trans. Ind. Electron. 2016, 63, 5932–5942. [Google Scholar] [CrossRef]
- La Bella, A.; Cominesi, S.R.; Sandroni, C.; Scattolini, R. Hierarchical Predictive Control of Microgrids in Islanded Operation. IEEE Trans. Autom. Sci. Eng. 2016, 14, 536–546. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model Predictive Control: A Review of Its Applications in Power Electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Young, H.; Rodríguez, J. Comparison of finite-control-set model predictive control versus a SVM-based linear controller. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Jiang, C.; Du, G.; Du, F.; Lei, Y. A Fast Model Predictive Control with Fixed Switching Frequency Based on Virtual Space Vector for Three-Phase Inverters. In Proceedings of the IEEE International Power Electronics and Application Conference and Exposition, Shenzhen, China, 4–7 November 2018; pp. 1–7. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. Generalized Closed-Loop Control Schemes with Embedded Virtual Impedances for Voltage Source Converters with LC or LCL Filters. IEEE Trans. Power Electron. 2012, 27, 1850–1861. [Google Scholar] [CrossRef]
- Escobar, G.; Mattavelli, P.; Stankovic, A.M.; Valdez, A.A.; Leyva-Ramos, J. An Adaptive Control for UPS to Compensate Unbalance and Harmonic Distortion Using a Combined Capacitor/Load Current Sensing. IEEE Trans. Ind. Electron. 2007, 54, 839–847. [Google Scholar] [CrossRef]
- Khan, H.S.; Aamir, M.; Ali, M.; Waqar, A.; Ali, S.U.; Imtiaz, J. Finite Control Set Model Predictive Control for Parallel Connected Online UPS System under Unbalanced and Nonlinear Loads. Energies 2019, 12, 581. [Google Scholar] [CrossRef]
- Rodriguez, J.; Pontt, J.; Silva, C.A.; Correa, P.; Lezana, P.; Cortés, P.; Ammann, U. Predictive Current Control of a Voltage Source Inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar] [CrossRef]
- Cortés, P.; Ortiz, G.; Yuz, J.I.; Rodríguez, J.; Vazquez, S.; Franquelo, L.G. Model Predictive Control of an Inverter With Output LC Filter for UPS Applications. IEEE Trans. Ind. Electron. 2009, 56, 1875–1883. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Vazquez, S.; Franquelo, L.G. Predictive control of a three-phase UPS inverter using two steps prediction horizon. In Proceedings of the IEEE International Conference on Industrial Technology, Vina del Mar, Chile, 14–17 March 2010; pp. 1283–1288. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.A.; Sarbanzadeh, M.; Sarebanzadeh, E.; Rivera, M.; Munoz, J. Predictive Control in Power Converter Applications: Challenge and Trends. In Proceedings of the IEEE International Conference on Automation/XXIII Congress of the Chilean Association of Automatic Control, Concepcion, Chile, 17–19 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.A.; Sarbanzadeh, M.; Sarbanzadeh, E.; Rivera, M.; Gregor, R. Recent Challenge and Trends of Predictive Control in Power Electronics Application. In Proceedings of the International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles International Transportation Electrification Conference, Nottingham, UK, 7–9 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Alhasheem, M.; Dragicevic, T.; Blaabjerg, F.; Davari, P. Parallel Operation of Dual VSCs Regulated by FCS-MPC Using Droop Control Approach. In Proceedings of the 20th European Conference on Power Electronics and Applications, Riga, Latvia, 17–21 September 2018; pp. 1–10. [Google Scholar]
- Peyghami, S.; Alhasheem, M.A.M.Z.Y.; Blaabjerg, F. Power Electronics-Microgrid Interfacing. In Variability, Scalability and Stability of Microgrid; Institution of Engineering and Technology: London, UK, 2019. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Carrasco, J.M.; Martinez, O.; Rodriguez, J.; Cortes, P.; Kouro, S. Model Predictive Control with constant switching frequency using a Discrete Space Vector Modulation with virtual state vectors. In Proceedings of the IEEE International Conference on Industrial Technology, Gippsland, VIC, Australia, 10–13 February 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Alhasheem, M.; Dragicevic, T.; Blaabjerg, F. Evaluation of multi predictive controllers for a two-level three-phase stand-alone voltage source converter. In Proceedings of the IEEE Southern Power Electronics Conference, Puerto Varas, Chile, 4–7 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Geyer, T.; Quevedo, D.E. Performance of Multistep Finite Control Set Model Predictive Control for Power Electronics. IEEE Trans. Power Electron. 2015, 30, 1633–1644. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Fan, S. On the inherent relationship between finite control set model predictive control and SVM-based deadbeat control for power converters. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Cincinnati, OH, USA, 1–5 October 2017; pp. 4628–4633. [Google Scholar] [CrossRef]
- Alhasheem, M.; Dragicevic, T.; Rivera, M.; Blaabjerg, F. Losses evaluation for a two-level three-phase stand-alone voltage source converter using model predictive control. In Proceedings of the IEEE Southern Power Electronics Conference, Puerto Varas, Chile, 4–7 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Tomlinson, M.; du Toit Mouton, H.; Kennel, R.; Stolze, P. A Fixed Switching Frequency Scheme for Finite-Control-Set Model Predictive Control—Concept and Algorithm. IEEE Trans. Ind. Electron. 2016, 63, 7662–7670. [Google Scholar] [CrossRef]
- Rivera, M. Predictive current control for a VSI with reduced common mode voltage operating at fixed switching frequency. In Proceedings of the IEEE 24th International Symposium on Industrial Electronics, Buzios, Brazil, 3–5 June 2015; pp. 980–985. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons: Hoboken, NJ, USA, 2012; Volume 40. [Google Scholar] [CrossRef]
- Aguirre, M.; Kouro, S.; Rojas, C.A.; Rodriguez, J.; Leon, J.I. Switching Frequency Regulation for FCS-MPC Based on a Period Control Approach. IEEE Trans. Ind. Electron. 2018, 65, 5764–5773. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay Compensation in Model Predictive Current Control of a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | 5.5 kVA System (Experimental) | System Model (Simulation) |
|---|---|---|
| S | 5.5 kVA | 5.5 kVA |
| 230 | 230 | |
| 600 | 600 | |
| I | ||
| < | < | |
| 50 Hz | 50 Hz | |
| () | () | |
| 10 <<1/2 | 10 <<1/2 | |
| 40 kHz | -40 kHz in order to com- apare with the experimental (Ts = 25 μs) -80 kHz in order to show the sampling effects (Ts = 12.5 μs) | |
| 5 mH | -For 80 kHz = 2.5 mH -For 40 kHz = 5 mH | |
| 60 μF | -For 80 kHz = 20 μF -For 40 kHz = 60 μF |
| Relative Importanace | Frequency Control Methods | Improved MPC (IMPC) |
|---|---|---|
| Case I | High importance | Low importance |
| Case II | Equal importance | Equal importance |
| Case III | Low importance | High importance |
| CMPC without Frequency Control | IMPC without Frequency Control | CMPC + SP-Control | IMPC + SP-Control | CMPC + Notch Control | IMPC + Notch Control | CMPC + Periodic Control | IMPC + Periodic Control | |
|---|---|---|---|---|---|---|---|---|
| THDv | Low | Low | High | Low | High | Low | High | Low |
| Stability | Stable | Stable | Stable | Stable | Stable at high frequencies | Stable | Stable | Stable |
| Switching frequency | Variable | Variable | Reduced- variable | Reduced- variable | Variable | Variable | Fixed | Fixed |
| Implementation | Intuitive very easy | Intuitive very easy | Intuitive very easy | Intuitive very easy | Intuitive easy | Intuitive easy | Intuitive easy | Intuitive easy |
| Computational burden | 1.056225 s | 1.0583 s | 1.0672 s | 1.0694 s | 1.1788 s | 1.1812 s | 1.0775 s | 1.0859 s |
| Weighting factors | No Factors | , | , | |||||
| Transient | Excellent 0.0035 s | Excellent 0.0030 s | Excellent 0.042 s | Excellent 0.037 s | Excellent 0.059 s | Excellent 0.052 s | Excellent 0.040 s | Excellent 0.035 s |
| Output THDv | 0.7% | 0.3% | ||||||
| Current error | ||||||||
| Sampling time (Ts) | 40 kHz | 40 kHz | 40 kHz | 40 kHz | 40 kHz | 40 kHz | 40 kHz | 40 kHz |
| Switching frequency | Avg ≈ 12 kHz | Avg ≈ 11.5 kHz | Desired frequency + large error ≈ 2 kHz | Desired frequency + large error ≈ 2 kHz | Desired frequency + large error ≈ 2 kHz | Desired frequency + large error ≈ 2 kHz | Desired frequency + small error ≈ 2 kHz | Desired frequency + small error ≈ 2 kHz |
| Output filter size | L = 5 mH C = 60 μF can be optimized to L = 2.3 mH, C = 25 μF | L = 5 mH C = 60 μF can be optimized to L = 2.3 mH, C = 15 μF | L = 5 mH C = 60 μF | L = 5 mH C = 60 μF | L = 5 mH C = 60 μF | L = 5 mH C = 60 μF | L = 3 mH C = 60 μF can be optimized to L = 3 mH, C = 40 μF | L = 5 mH C = 60 μF can be optimized to L = 3 mH, C = 40 μF |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alhasheem, M.; Abdelhakim, A.; Blaabjerg, F.; Mattavelli, P.; Davari, P. Model Predictive Control of Grid Forming Converters with Enhanced Power Quality. Appl. Sci. 2020, 10, 6390. https://doi.org/10.3390/app10186390
Alhasheem M, Abdelhakim A, Blaabjerg F, Mattavelli P, Davari P. Model Predictive Control of Grid Forming Converters with Enhanced Power Quality. Applied Sciences. 2020; 10(18):6390. https://doi.org/10.3390/app10186390
Chicago/Turabian StyleAlhasheem, Mohammed, Ahmed Abdelhakim, Frede Blaabjerg, Paolo Mattavelli, and Pooya Davari. 2020. "Model Predictive Control of Grid Forming Converters with Enhanced Power Quality" Applied Sciences 10, no. 18: 6390. https://doi.org/10.3390/app10186390
APA StyleAlhasheem, M., Abdelhakim, A., Blaabjerg, F., Mattavelli, P., & Davari, P. (2020). Model Predictive Control of Grid Forming Converters with Enhanced Power Quality. Applied Sciences, 10(18), 6390. https://doi.org/10.3390/app10186390