Spatial Stiffness Analysis of the Planar Parallel Part for a Hybrid Model Support Mechanism


Abstract
Featured Application
Abstract
1. Introduction
- (1)
- Two types of 3-DoF planar parallel parts for a model support mechanism are proposed and the stiffness models are established while considering constraint stiffness.
- (2)
- Two novel stiffness indexes are proposed to conduct a quantitative evaluation of comprehensive stiffness characteristics in the movable and non-movable directions.
- (3)
- The effects of the variation of the actuator parameter on stiffness characteristics are investigated on the basis of the proposed indexes.
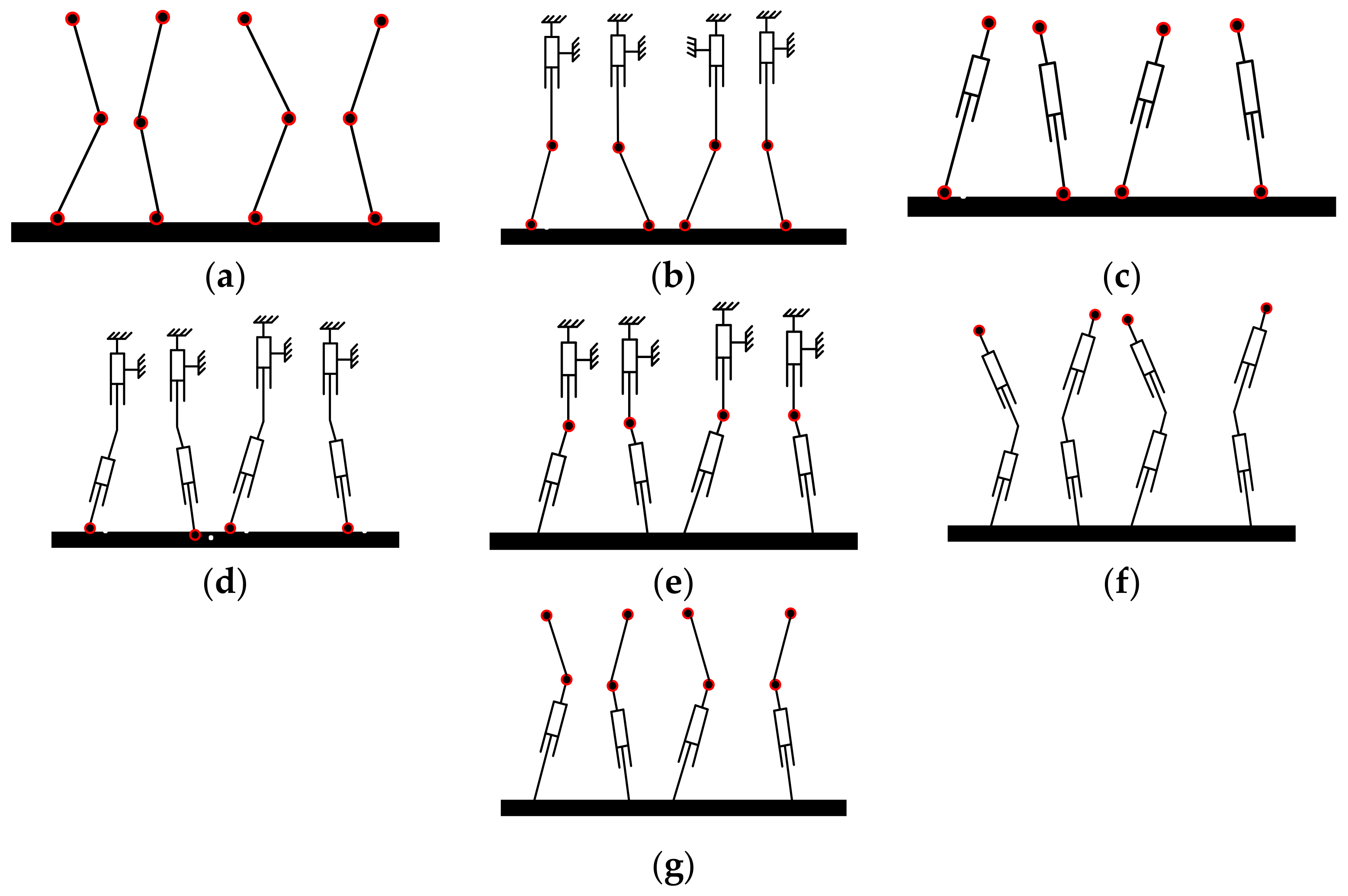
2. Discussion on the Types of Parallel Part
- (a)
- The driving joints must be distributed on each branch as evenly as possible.
- (b)
- The driving joints must be set on or near the fixed base and they must be prioritized.
- (c)
- The existence of a non-driving P joint should be avoided.
3. Overall Jacobian Matrix
4. Stiffness Model
4.1. Active Stiffness
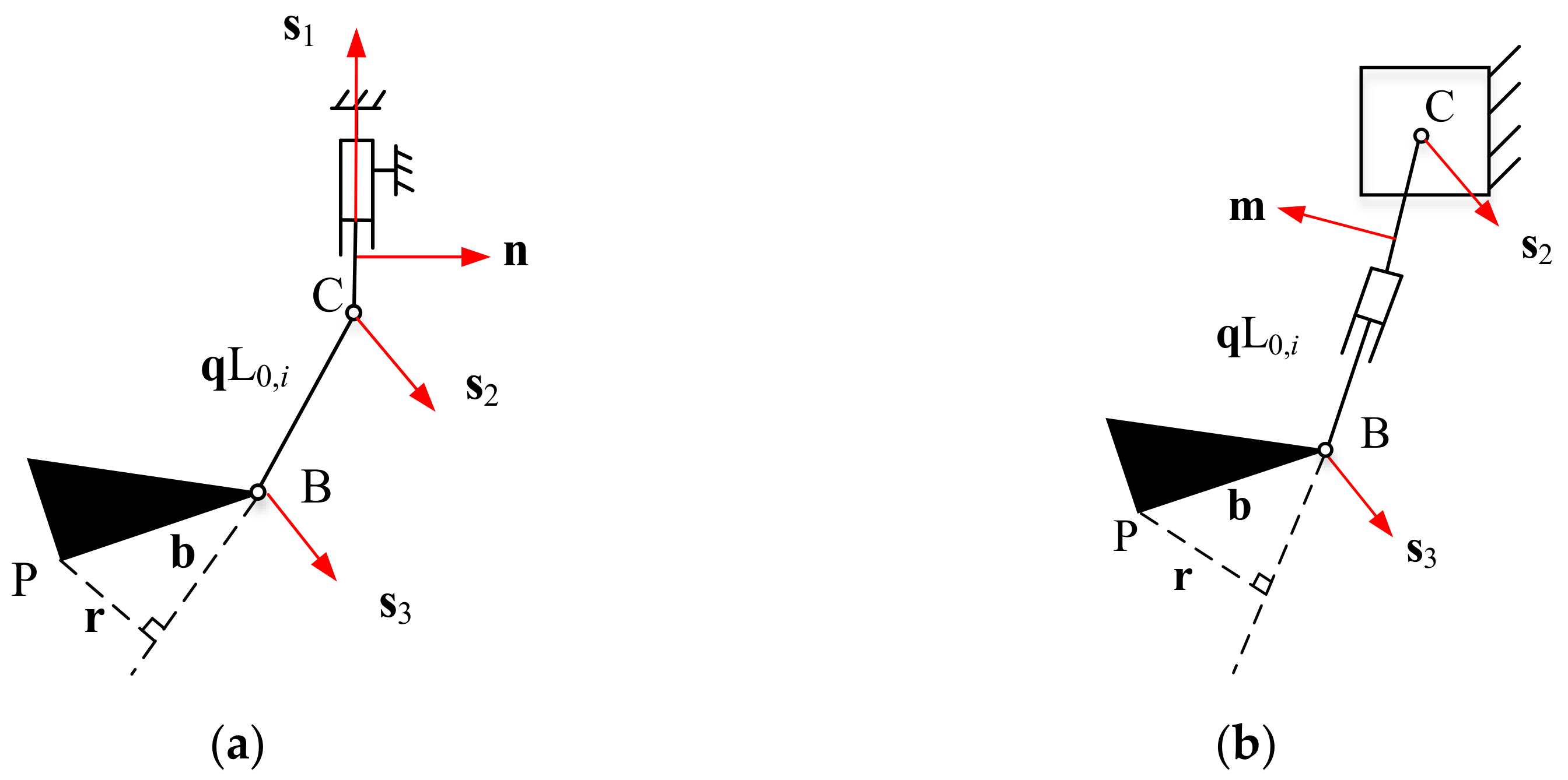
4.1.1. Active Stiffness of PRR Driving Chain
4.1.2. Active Stiffness of RPR Driving Chain
4.2. Constraint Stiffness
4.2.1. Constraint Stiffness of PRR-Type Driving Chain
4.2.2. Constraint Stiffness of RPR Driving Chain
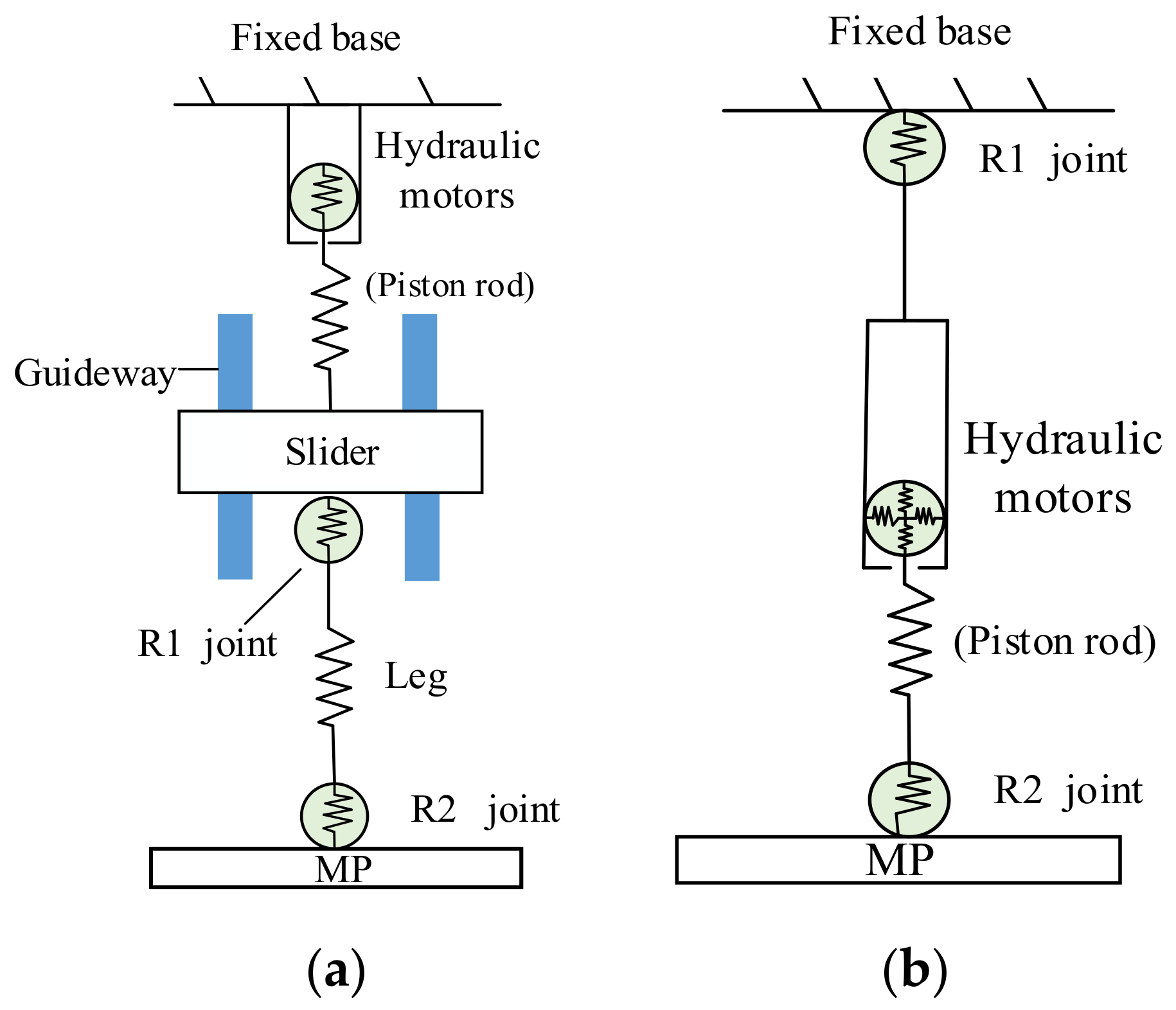
5. Mechanism Description and Inverse Position Analysis
- (1)
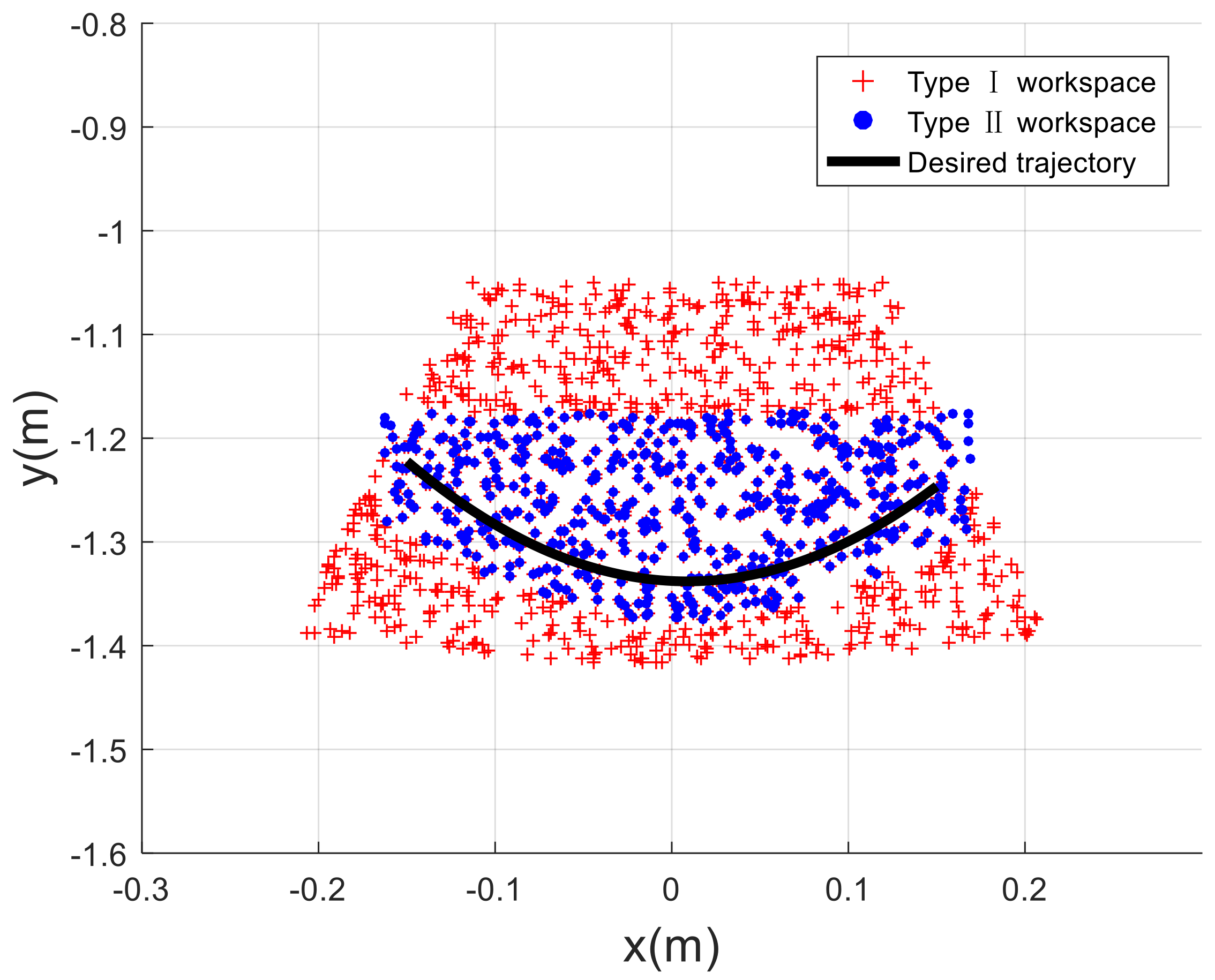
- Stroke of active P joints. For each type of mechanism, the strokes of the hydraulic piston rod act as the actuator, which defines the workspace.
- (2)
- Rotational angle range of the R1 joint. To avoid the interference between links, the rotational angle range of the R1 joint should be considered:
- (3)
- Interferences of MP between fixed base. As for type I, due to the particularity of the fixed base configuration and limitation for range of the P joint, the mobile platform will be restricted. As expressed in Equation (30), d0 denotes the length of F1 and F2 in the y-direction, dmp,j denotes the distance of MP to the fixed coordinate system in the y-direction.
6. Static Analysis and Stiffness Matrix Generation
- (1)
- No friction is observed between two contact joints.
- (2)
- No preload is observed on the MP.
- (3)
- The MP and the fixed platform are set as rigid bodies, and no deformation is observed.
- (4)
- Regardless of the antagonistic stiffness, the overall Jacobian matrix does not change caused by external force.
7. Discussion
- Most studies only consider the stiffness in plane movement when analyzing the stiffness of the planar parallel mechanism. For example, the work [14] researched performance of three planar parallel manipulators, and finally a 3 × 3 stiffness matrix was achieved. However, the mechanism bears the force in six directions in the actual work. We build a stiffness model considering the constraint stiffness, which can reflect the actual stiffness characteristic of the mechanism.
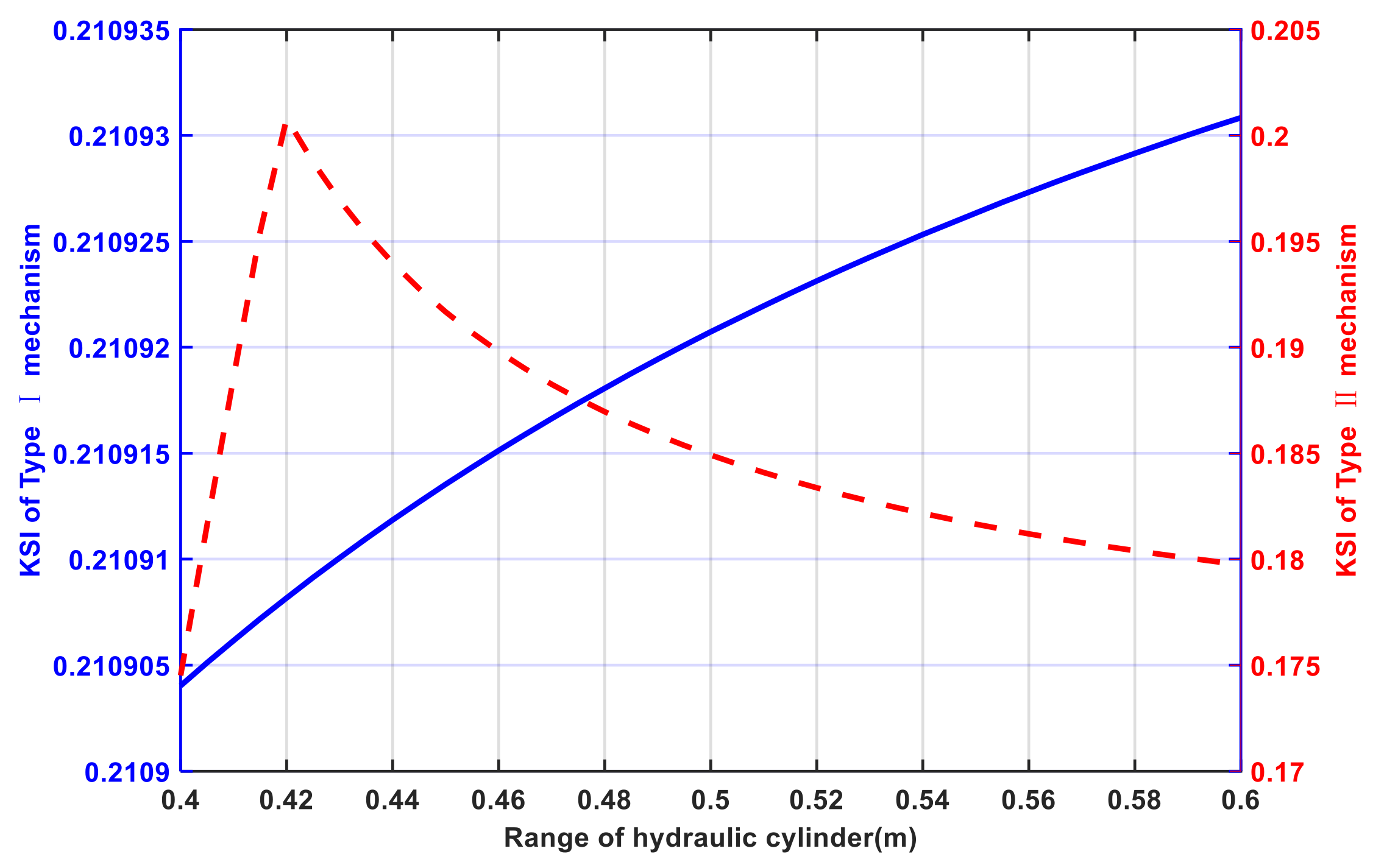
- Most of the existing stiffness indexes are focused on evaluating the isotropic characteristics of the mechanism and the ability to resist deformations. The total linear stiffness index (TLSI) and the total angular stiffness index (TASI) are separated to evaluate the ability of the mechanism to resist deformation in [40,41]. As shown in Equation (44), ctt is the linear compliance element matrix, crr is the angular compliance element matrix. It can be found from Figure 12 that, with the increase of the hydraulic cylinder range, TLSI and TASI of the two types of mechanisms have the same decreasing trend. However, it is difficult to analyze the phenomenon from the theoretical formulas, and it brings obstacles for subsequent optimization of the component size. The stiffness index KSI was proposed in [34], which is a traditional mechanism stiffness evaluation method. As shown in Equation (45), λmax, λmin are the maximum and minimum eigenvalues of the stiffness matrix Kp, respectively This index reflects the isotropy of the mechanism geometry. From index values in Figure 13, we can find the hydraulic cylinder range has less effect on the KSI of the two mechanisms. This method lacks effective output parameter support for evaluating the dimensional characteristics of planar asymmetric mechanisms. When investigating the effect of the parameters on the stiffness in given directions, the proposed indexes are more clear explanations.
Author Contributions
Funding
Conflicts of Interest
Appendix A

Appendix B
Appendix C

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| lab | 0.450 m | E | 2.1 × 105 N/m2 |
| lbc | 0.05 m | V1L | 1.9 × 10−4 m3 |
| R | 0.014 m | V2L | 1 × 10−4 m3 |
| AAB | 0.6154 m | b | 0.032 m |
| ABC | 1.9625 m | βe | 1.8 × 109 N/m2 |
| L1 | 0.026 m | A1 | 1.96 × 10−3 m2 |
| L | 0.38 m | A2 | 2.8 × 10−4 m2 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Le | 0.0024 m | D | 0.002 m |
| Lb | 0.003 m | DW | 0.004 m |
| bd | 0.002 m | lt | 0.058 m |
| Ls | 0.126 m | Pz | 0.00562 m |
| α | 45° | Px | 0.0172 m |
| Z0 | 26 | n0 | 13 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| mM | 284 kg | mH | 28.3 kg |
| mS | 43.3 kg | L0,1/L0,2 | 0.392 m |
| mL,1 | 2.9 kg | L0,3/L0,4 | 0.443 m |
| mL,2 | 3.3 kg | L0,5/L0,6 | 0.482 m |
| mL,3 | 3.3 kg | L0,7/L0,8 | 0.4 m |
| mL,4 | 2.9 kg | g | 9.8 m/s2 |
References
- Pereira, J.D. Wind Tunnels: Aerodynamics, Model and Experiments; Nova Science Publishers, Inc.: Hauppauge, NY, USA, 2011; ISBN 9781619423299. [Google Scholar]
- Portman, V.; Sandler, B.Z.; Chapsky, V.; Zilberman, I. A 6-DOF isotropic measuring system for force and torque components of drag for use in wind tunnels: IIInnovative design. Int. J. Mech. Mater. Des. 2009, 5, 337–352. [Google Scholar] [CrossRef]
- Lafourcade, P.; Llibre, M. First steps toward a sketch-based design methodology for wire-driven manipulators. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Kobe, Japan, 20–24 July 2003; AIM: Townsville, Australia, 2003; Volume 1, pp. 143–148. [Google Scholar]
- Yangwen, X.; Qi, L.; Yaqing, Z.; Bin, L. Model aerodynamic tests with a wire-driven parallel suspension system in low-speed wind tunnel. Chin. J. Aeronaut. 2010, 23, 393–400. [Google Scholar] [CrossRef]
- Johnson, W.G.; Dress, D.A. 13-Inch Magnetic Suspension and Balance System Wind Tunnel; NASA Technical Memorandum; NASA: Hampton, VA, USA, 1989.
- Rein, M.; Höhler, G.; Schütte, A.; Bergmann, A.; Löser, T. Ground-based simulation of complex maneuvers of a delta-wing aircraft. In Proceedings of the AIAA Aerodynamic Measurement Technology & Ground Testing Conference, San Francisco, CA, USA, 5–8 June 2006; DLR: Oberpfaffenhofen, Germany, 2006; pp. 2–6. [Google Scholar]
- Bergmann, A.; Huebner, A.; Loeser, T. Experimental and numerical 1research on the aerodynamics of unsteady moving aircraft. Prog. Aerosp. Sci. 2008, 44, 121–137. [Google Scholar] [CrossRef]
- Honegger, M.; Codourey, A.; Burdet, E. Adaptive control of the hexaglide, a 6 dof parallel manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; Volume 1, pp. 543–548. [Google Scholar]
- Guigue, A.; Ahmadi, M.; Tang, F.C. On the kinematic analysis and design of a redundant manipulator for a Captive Trajectory Simulation system (CTS). In Proceedings of the 2006 Canadian Conference on Electrical and Computer Engineering, Ottawa, ON, Canada, 7–10 May 2006; pp. 1514–1517. [Google Scholar] [CrossRef]
- Jiang, L.Y.; Tang, F.C.; Benmeddour, A.; Fortin, F. Sting effects on store captive loads. In Proceedings of the 39th Aerospace Sciences Meeting and Exhibit, Ottawa, QC, Canada, 8–11 January 2001; AIAA: Reno, NV, USA, 2001; pp. 6–8. [Google Scholar]
- Bergmann, A. Modern wind tunnel techniques for unsteady testing-Development of dynamic test rigs. Notes Numer. Fluid Mech. Multidiscip. Des. 2009, 102, 59–77. [Google Scholar] [CrossRef]
- Geng, X.; Shi, Z.; Cheng, K.; Li, L. A new hybrid mechanism for dynamic wind tunnel test of high maneuverable air vehicle. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 1964–1974. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, Y.; Yao, J.; Hu, B.; Zhao, Y. Kinematics, dynamics and stiffness analysis of a novel 3-DOF kinematically/actuation redundant planar parallel mechanism. Mech. Mach. Theory 2017, 116, 203–219. [Google Scholar] [CrossRef]
- Wu, J.; Wang, J.; Wang, L.; You, Z. Performance comparison of three planar 3-DOF parallel manipulators with 4-RRR, 3-RRR and 2-RRR structures. Mechatronics 2010, 20, 510–517. [Google Scholar] [CrossRef]
- Arsenault, M.; Boudreau, R. Synthesis of planar parallel mechanisms while considering workspace, dexterity, stiffness and singularity avoidance. J. Mech. Des. Trans. ASME 2006, 128, 69–78. [Google Scholar] [CrossRef]
- Gallant, M.; Boudreau, R. The synthesis of planar parallel manipulators with prismatic joints for an optimal, singularity-free workspace. J. Robot. Syst. 2002, 19, 13–24. [Google Scholar] [CrossRef]
- Wu, G.; Bai, S.; Kepler, J. Stiffness characterization of a 3-PPR planar parallel manipulator with actuation compliance. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 2291–2302. [Google Scholar] [CrossRef]
- Klimchik, A.; Chablat, D.; Pashkevich, A. Stiffness modeling for perfect and non-perfect parallel manipulators under internal and external loadings. Mech. Mach. Theory 2014, 79, 1–28. [Google Scholar] [CrossRef]
- Pashkevich, A.; Klimchik, A.; Chablat, D. Enhanced stiffness modeling of manipulators with passive joints. Mech. Mach. Theory 2011, 46, 662–679. [Google Scholar] [CrossRef]
- Pashkevich, A.; Chablat, D.; Wenger, P. Stiffness analysis of overconstrained parallel manipulators. Mech. Mach. Theory 2009, 44, 966–982. [Google Scholar] [CrossRef]
- Deblaise, D.; Hernot, X.; Maurine, P. Asystematic analytical method for PKM Stiffness Matrix Calculation. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 4213–4219. [Google Scholar]
- Wu, J.; Wang, J.; Wang, L.; Li, T.; You, Z. Study on the stiffness of a 5-DOF hybrid machine tool with actuation redundancy. Mech. Mach. Theory 2009, 44, 289–305. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, Y.; Jin, Y. Kinetostatic-model-based stiffness analysis of Exechon PKM. Robot. Comput. Integr. Manuf. 2016, 37, 208–220. [Google Scholar] [CrossRef]
- Cao, W.A.; Ding, H. A method for stiffness modeling of 3R2T overconstrained parallel robotic mechanisms based on screw theory and strain energy. Precis. Eng. 2018, 51, 10–29. [Google Scholar] [CrossRef]
- Yang, C.; Li, Q.; Chen, Q.; Xu, L. Elastostatic stiffness modeling of overconstrained parallel manipulators. Mech. Mach. Theory 2018, 122, 58–74. [Google Scholar] [CrossRef]
- Cao, W.A.; Yang, D.; Ding, H. A method for stiffness analysis of overconstrained parallel robotic mechanisms with Scara motion. Robot. Comput. Integr. Manuf. 2018, 49, 426–435. [Google Scholar] [CrossRef]
- Raoofian, A.; Taghvaeipour, A.; Kamali, A. On the stiffness analysis of robotic manipulators and calculation of stiffness indices. Mech. Mach. Theory 2018, 130, 382–402. [Google Scholar] [CrossRef]
- Yan, S.J.; Ong, S.K.; Nee, A.Y.C. Stiffness analysis of parallelogram-type parallel manipulators using a strain energy method. Robot. Comput. Integr. Manuf. 2016, 37, 13–22. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. Stiffness analysis for a 3-PUU parallel kinematic machine. Mech. Mach. Theory 2008, 43, 186–200. [Google Scholar] [CrossRef]
- Lian, B.; Sun, T.; Song, Y.; Jin, Y.; Price, M. Stiffness analysis and experiment of a novel 5-DoF parallel kinematic machine considering gravitational effects. Int. J. Mach. Tools Manuf. 2015, 95, 82–96. [Google Scholar] [CrossRef]
- Sun, T.; Lian, B.; Song, Y. Stiffness analysis of a 2-DoF over-constrained RPM with an articulated traveling platform. Mech. Mach. Theory 2016, 96, 165–178. [Google Scholar] [CrossRef]
- Joshi, S.A.; Tsai, L.W. Jacobian analysis of limited-DOF parallel manipulators. J. Mech. Des. Trans. ASME 2002, 124, 254–258. [Google Scholar] [CrossRef]
- Ding, J.; Wang, C.; Wu, H. Accuracy analysis of redundantly actuated and overconstrained parallel mechanisms with actuation errors. J. Mech. Robot. 2018, 10, 1–7. [Google Scholar] [CrossRef]
- Gosselin, C. Stiffness mapping for parallel manipulators. IEEE Trans. Robot. Autom. 1990, 6, 377–382. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Hatwal, H.; Ghosh, A. On the Optimum Design of Stewart Platform Type Parallel Manipulators. Robotica 1995, 13, 133–140. [Google Scholar] [CrossRef]
- Chiacchio, P.; Chiaverini, S.; Sciavicco, L.; Siciliano, B. Global Task Space Manipulability Ellipsoids for Multiple-Arm Systems. IEEE Trans. Robot. Autom. 1991, 7, 678–685. [Google Scholar] [CrossRef]
- Asada, H. A geometrical representation of manipulator dynamics and its application to arm design. J. Dyn. Syst. Meas. Control. Trans. ASME 1983, 105, 131–142. [Google Scholar] [CrossRef]
- Huang, S.; Schimmels, J.M. The bounds and realization of spatial stiffnesses achieved with simple springs connected in parallel. IEEE Trans. Robot. Autom. 1998, 14, 466–475. [Google Scholar] [CrossRef]
- Huang, S.; Schimmels, J.M. The eigenscrew decomposition of spatial stiffness matrices. IEEE Trans. Robot. Autom. 2000, 16, 146–156. [Google Scholar] [CrossRef]
- Chen, C.; Peng, F.; Yan, R.; Li, Y.; Wei, D.; Fan, Z.; Tang, X.; Zhu, Z. Stiffness performance index based posture and feed orientation optimization in robotic milling process. Robot. Comput. Integr. Manuf. 2019, 55, 29–40. [Google Scholar] [CrossRef]
- Guo, Y.; Dong, H.; Ke, Y. Stiffness-oriented posture optimization in robotic machining applications. Robot. Comput. Integr. Manuf. 2015, 35, 69–76. [Google Scholar] [CrossRef]
- Li, M.; Wu, H.; Handroos, H. Static stiffness modeling of a novel hybrid redundant robot machine. Fusion Eng. Des. 2011, 86, 1838–1842. [Google Scholar] [CrossRef]
- Liu, S. The Mechanical Analysis of Roller Linear Guideway; Huazhong University of Science and Technology: Wuhan, China, 2011. [Google Scholar]













© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, J.; Xie, Z.; Wu, X. Spatial Stiffness Analysis of the Planar Parallel Part for a Hybrid Model Support Mechanism. Appl. Sci. 2020, 10, 6342. https://doi.org/10.3390/app10186342
Gu J, Xie Z, Wu X. Spatial Stiffness Analysis of the Planar Parallel Part for a Hybrid Model Support Mechanism. Applied Sciences. 2020; 10(18):6342. https://doi.org/10.3390/app10186342
Chicago/Turabian StyleGu, Jiawei, Zhijiang Xie, and Xiaoyong Wu. 2020. "Spatial Stiffness Analysis of the Planar Parallel Part for a Hybrid Model Support Mechanism" Applied Sciences 10, no. 18: 6342. https://doi.org/10.3390/app10186342
APA StyleGu, J., Xie, Z., & Wu, X. (2020). Spatial Stiffness Analysis of the Planar Parallel Part for a Hybrid Model Support Mechanism. Applied Sciences, 10(18), 6342. https://doi.org/10.3390/app10186342