Stroke Kinematics Analysis and Hydrodynamic Modeling of a Buoyancy-Supported Water Strider Robot †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Structure of the Robot
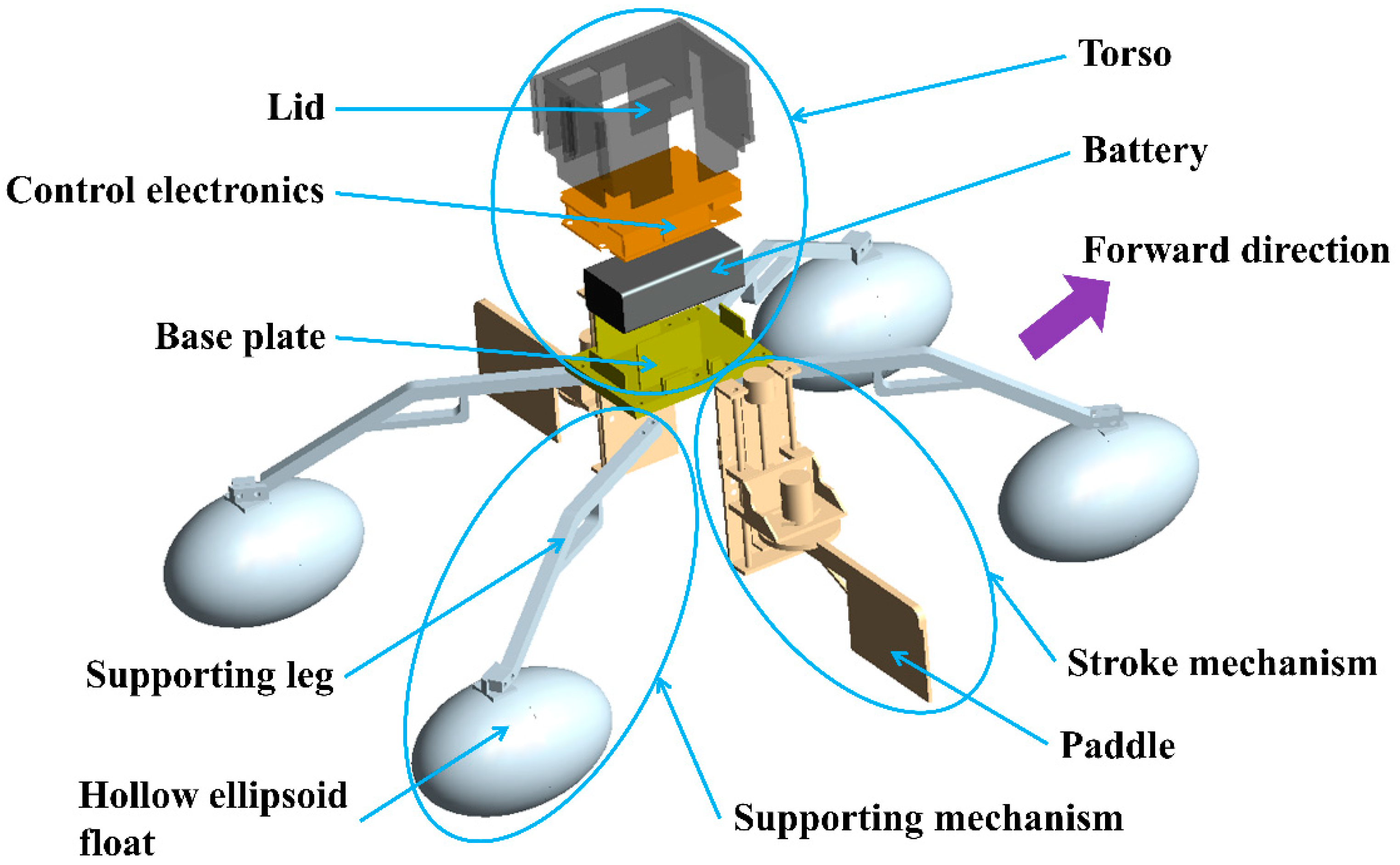
2.1. Overall Mechanical Design
2.2. Design of the Supporting Mechanisms
2.3. Design of the Stroke Mechanisms
3. The Kinematics Analysis of the Stroke Mechanism
4. Hydrodynamic Modeling and Analysis of the Robot
4.1. Hydrodynamic Modeling
4.2. Coefficients Evaluation of the Hydrodynamic Model
4.2.1. KT, KL and KD Measurement
4.2.2. MV Measurement
4.3. Hydrodynamic Analysis for the Robot
5. Experimental Verification
5.1. Verification of the Stroke Trajectory Curve
5.2. Verification of the Robot Mobility as Well as the Hydrodynamic Model
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, K.; Ma, Y.; Shan, H.; Ma, S. A snake-like robot with envelope wheels and obstacle-aided gaits. Appl. Sci. 2019, 9, 3749. [Google Scholar] [CrossRef]
- Nguyen, Q.V.; Chan, W.L. Development and flight performance of a biologically-inspired tailless flapping-wing micro air vehicle with wing stroke plane modulation. Bioinspiration Biomim. 2018, 14, 016015. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Liu, W.; Fu, X.; Bonsignori, G.; Scarfogliero, U.; Stefanini, C.; Dario, P. Jumping like an insect: Design and dynamic optimization of a jumping mini robot based on bio-mimetic inspiration. Mechatronics 2012, 22, 167–176. [Google Scholar] [CrossRef]
- Picardi, G.; Laschi, C.; Calisti, M. Model-based open loop control of a multigait legged underwater robot. Mechatronics 2018, 55, 162–170. [Google Scholar] [CrossRef]
- Yang, W.; Zhang, W. A worm-inspired robot flexibly steering on horizontal and vertical surfaces. Appl. Sci. 2019, 9, 2168. [Google Scholar] [CrossRef]
- Goodwyn, P.; Wang, J.; Wang, Z.; Ji, A.; Dai, Z.; Fujisaki, K. Water striders: The biomechanics of water locomotion and functional morphology of the hydrophobic surface (insecta: Hemiptera-heteroptera). J. Bionic Eng. 2008, 5, 121–126. [Google Scholar] [CrossRef]
- Sun, P.; Zhao, M.; Jiang, J.; Zheng, Y. The study of dynamic force acted on water strider leg departing from water surface. AIP Adv. 2018, 8, 015228. [Google Scholar] [CrossRef]
- Prakash, M.; Bush, J.W.M. Interfacial propulsion by directional adhesion. Int. J. Non-Linear Mech. 2011, 46, 607–615. [Google Scholar] [CrossRef]
- Song, Y.S.; Sitti, M. Surface-tension-driven biologically inspired water strider robots: Theory and experiments. IEEE Trans. Robot. 2007, 23, 578–589. [Google Scholar] [CrossRef]
- Yan, J.H.; Zhang, X.B.; Zhao, J.; Liu, G.F.; Cai, H.G.; Pan, Q.M. A miniature surface tension-driven robot using spatially elliptical moving legs to mimic a water strider’s locomotion. Bioinspiration Biomim. 2015, 10, 046016. [Google Scholar] [CrossRef]
- Yang, K.; Liu, G.; Yan, J.; Wang, T.; Zhang, X.; Zhao, J. A water-walking robot mimicking the jumping abilities of water striders. Bioinspiration Biomim. 2016, 11, 066002. [Google Scholar] [CrossRef] [PubMed]
- Koh, J.S.; Yang, E.; Jung, G.P.; Jung, S.P.; Son, J.H.; Lee, S.; Jablonski, P.G.; Wood, R.J.; Kim, H.; Cho, K. Jumping on water: Surface tension-dominated jumping of water striders and robotic insects. Science 2015, 349, 517–521. [Google Scholar] [CrossRef] [PubMed]
- Hu, D.L.; Chan, B.; Bush, J.W.M. The hydrodynamics of water strider locomotion. Nature 2003, 424, 663–666. [Google Scholar] [CrossRef] [PubMed]
- Suhr, S.H.; Song, Y.S.; Lee, S.J.; Sitt, M. Biologically inspired miniature water strider robot. Robot. Sci. Syst. I 2005, 1, 319–325. [Google Scholar] [CrossRef]
- Yan, J.; Yang, K.; Liu, G.; Zhao, J. Flexible driving mechanism inspired water strider robot walking on water surface. IEEE Access 2020, 8, 89643–89654. [Google Scholar] [CrossRef]
- Suzuki, K.; Ichinose, R.W.; Takanobu, H.; Miura, H. Development of water surface mobile robot inspired by water striders. Micro Nano Lett. 2017, 12, 575–579. [Google Scholar] [CrossRef]
- Fujii, S.; Nakamura, T. Development of an amphibious hexapod robot based on a water strider. In Proceedings of the 10th International Conference (CLAWAR), Singapore, 9–12 October 2007; pp. 135–143. [Google Scholar]
- Irawan, A.; Khim, B.K.; Yin, T. PSpHT a water strider-like robot for water inspection: Framework and control architecture. In Proceedings of the IEEE International Conference on Ubiquitous Robots and Ambient Intelligence, Kuala Lumpur, Malaysia, 12–15 November 2014; pp. 403–407. [Google Scholar]
- Gao, T.; Cao, J.; Gao, F.; Zhu, D. The research of a bionic robot that can walk on water surface based on water strider. In Proceedings of the International Technology and Innovation Conference, Hangzhou, China, 6–7 November 2006; pp. 2880–2885. [Google Scholar]
- Huang, H.; Zhang, S.; Chen, X.; Miao, J.; Ge, H. Design and modeling of a novel biomimetic robot inspired by water strider. Mar. Technol. Soc. J. 2016, 50, 35–44. [Google Scholar] [CrossRef]
- Peng, G.; Feng, J.J. A numerical investigation of the propulsion of water walkers. J. Fluid Mech. 2011, 668, 363–383. [Google Scholar] [CrossRef]
- Bush, J.W.M.; Hu, D.L. Walking on water: Biolocomotion at the interface. Phys. Today 2005, 38, 339–369. [Google Scholar] [CrossRef]
- Floyd, S.; Sitti, M. Design and development of the lifting and propulsion mechanism for a biologically inspired water runner robot. IEEE Trans. Robot. 2008, 24, 698–709. [Google Scholar] [CrossRef]
- Kim, H.G.; Jeong, K.; Seo, T.W. Analysis and experiment on the steering control of a water-running robot using hydrodynamic forces. J. Bionic Eng. 2017, 14, 34–46. [Google Scholar] [CrossRef]
- Wu, G.; Sheng, C.; Shen, Y.; Guo, Y.; Liu, X.; Zhang, C.; Wu, Y.; Huang, H. Structural design and stroke kinematics analysis of a water strider robot. In Proceedings of the 2018 MTS/IEEE Oceans, Charleston, SC, USA, 28–31 May 2018; pp. 1–6. [Google Scholar]
- Bloomenthal, J.; Roken, J. Homogeneous coordinates. Vis. Comput. 1994, 11, 15–26. [Google Scholar] [CrossRef]
- Caplan, N.; Gardner, T.N. A fluid dynamic investigation of the big blade and macon oar blade designs in rowing propulsion. J. Sports Sci. 2007, 25, 643–650. [Google Scholar] [CrossRef]
- Fujiyama, S.; Tsubota, M. Drag force on an oscillating object in quantum turbulence. Phys. Rev. B 2009, 79, 094513. [Google Scholar] [CrossRef]
- Toussaint, H.M.; Coen, V.D.B.; Beek, W.J. “Pumped-up propulsion” during front crawl swimming. Med. Sci. Sports Exerc. 2002, 34, 314–319. [Google Scholar] [CrossRef] [PubMed]
- Pan, Y.C.; Zhang, H.X.; Zhou, Q.D. Numerical prediction of submarine hydrodynamic coefficients using CFD simulation. J. Hydrodyna. 2012, 24, 840–847. [Google Scholar] [CrossRef]
- Ghassemi, H.; Yari, E. The added mass coefficient computation of sphere, ellipsoid and marine propellers using boundary element method. Pol. Marit. Res. 2011, 18, 17–26. [Google Scholar] [CrossRef]





















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Sheng, C.; Wu, G.; Shen, Y.; Wang, H. Stroke Kinematics Analysis and Hydrodynamic Modeling of a Buoyancy-Supported Water Strider Robot. Appl. Sci. 2020, 10, 6300. https://doi.org/10.3390/app10186300
Huang H, Sheng C, Wu G, Shen Y, Wang H. Stroke Kinematics Analysis and Hydrodynamic Modeling of a Buoyancy-Supported Water Strider Robot. Applied Sciences. 2020; 10(18):6300. https://doi.org/10.3390/app10186300
Chicago/Turabian StyleHuang, Haocai, Chaowu Sheng, Gang Wu, Yun Shen, and Hangzhou Wang. 2020. "Stroke Kinematics Analysis and Hydrodynamic Modeling of a Buoyancy-Supported Water Strider Robot" Applied Sciences 10, no. 18: 6300. https://doi.org/10.3390/app10186300
APA StyleHuang, H., Sheng, C., Wu, G., Shen, Y., & Wang, H. (2020). Stroke Kinematics Analysis and Hydrodynamic Modeling of a Buoyancy-Supported Water Strider Robot. Applied Sciences, 10(18), 6300. https://doi.org/10.3390/app10186300