Genetic Optimized Location Aided Routing Protocol for VANET Based on Rectangular Estimation of Position




Abstract
1. Introduction
2. Related Work
- GA was seen to be the highest-ranking algorithm since it outperformed the other algorithms and provided solutions to the defined optimization problems;
- PSO offered the best trade-off between the performance and the time required for the execution. It can also help to achieve optimum quality of service and the routing overhead;
- Using the optimized configurations can decrease the routing load that was generated by the OLSR;
- The validation experiments that the optimized configurations are able to decrease the overall workload of the network;
- The automatically tuned OLSR was seen to be more scalable as compared to standard versions, since it has a low probability of being affected by the congestion problems and the medium access.
3. Methodology
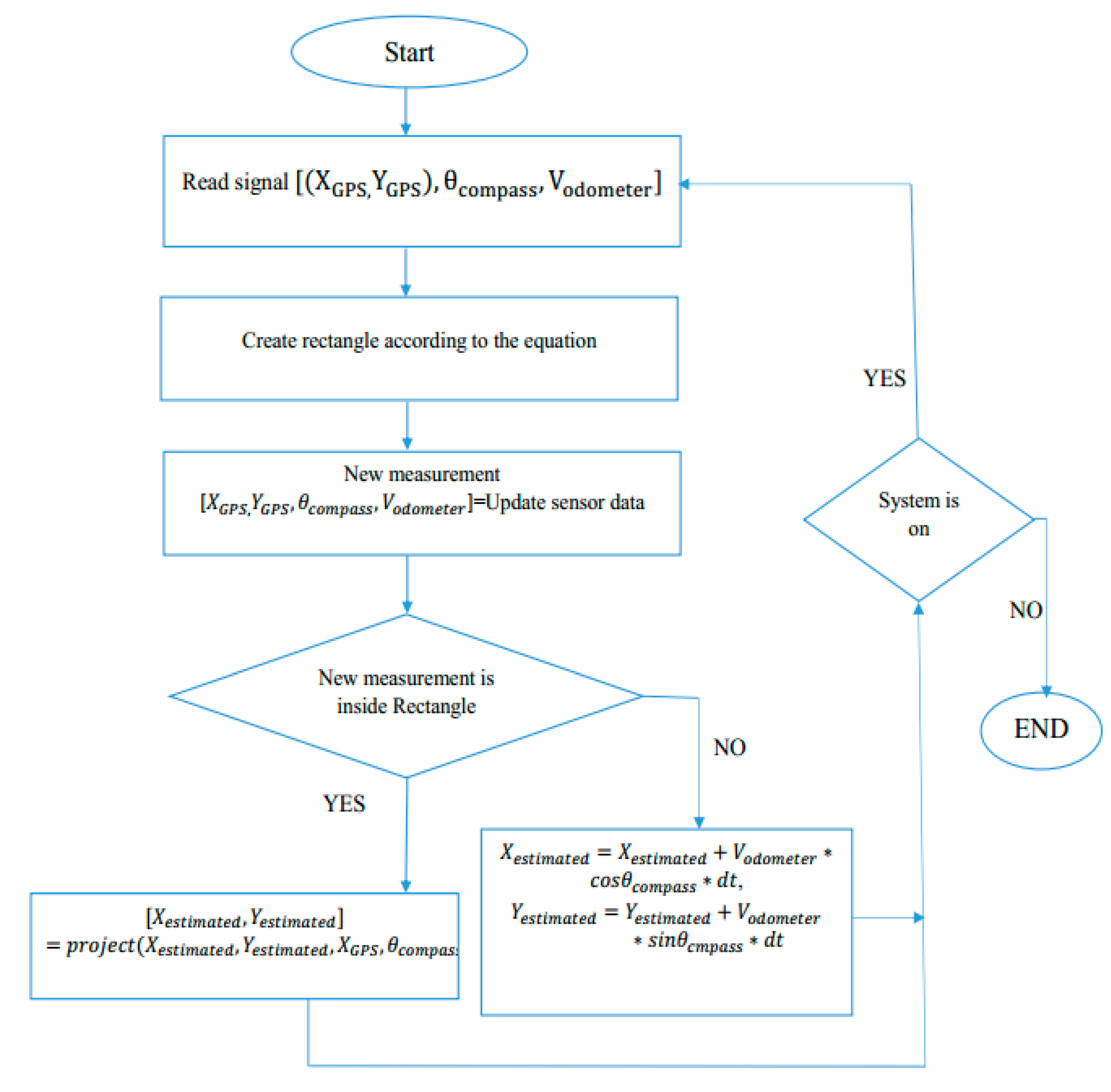
3.1. Rectangle-Aided Location-Aided Routing (RALAR)
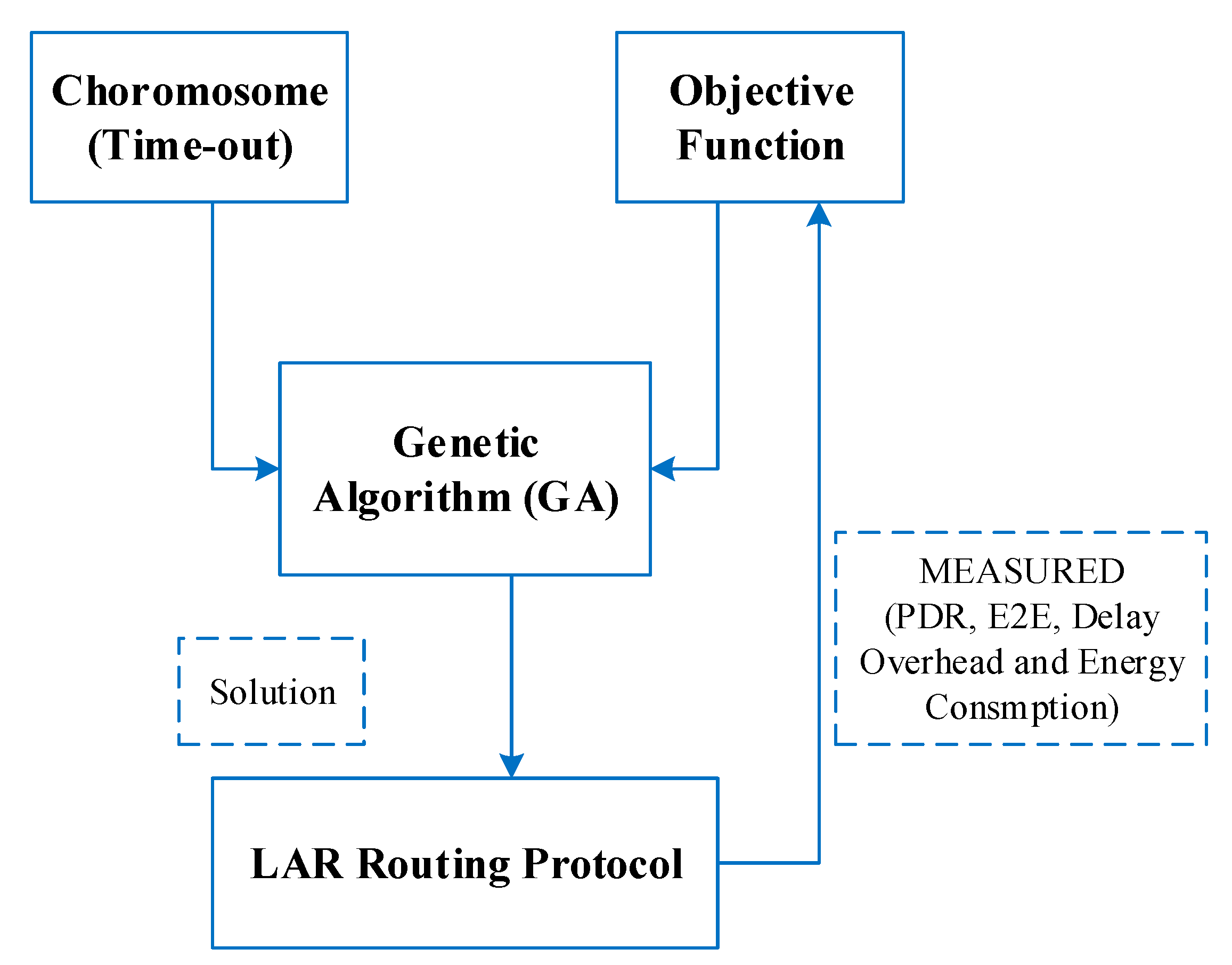
3.2. Optimization Timeout for RALAR Using Genetic Algorithm (GA)
4. Simulation Environment
4.1. Data Generation
4.2. Node’s Mobility Model
4.3. The Performance Metrics
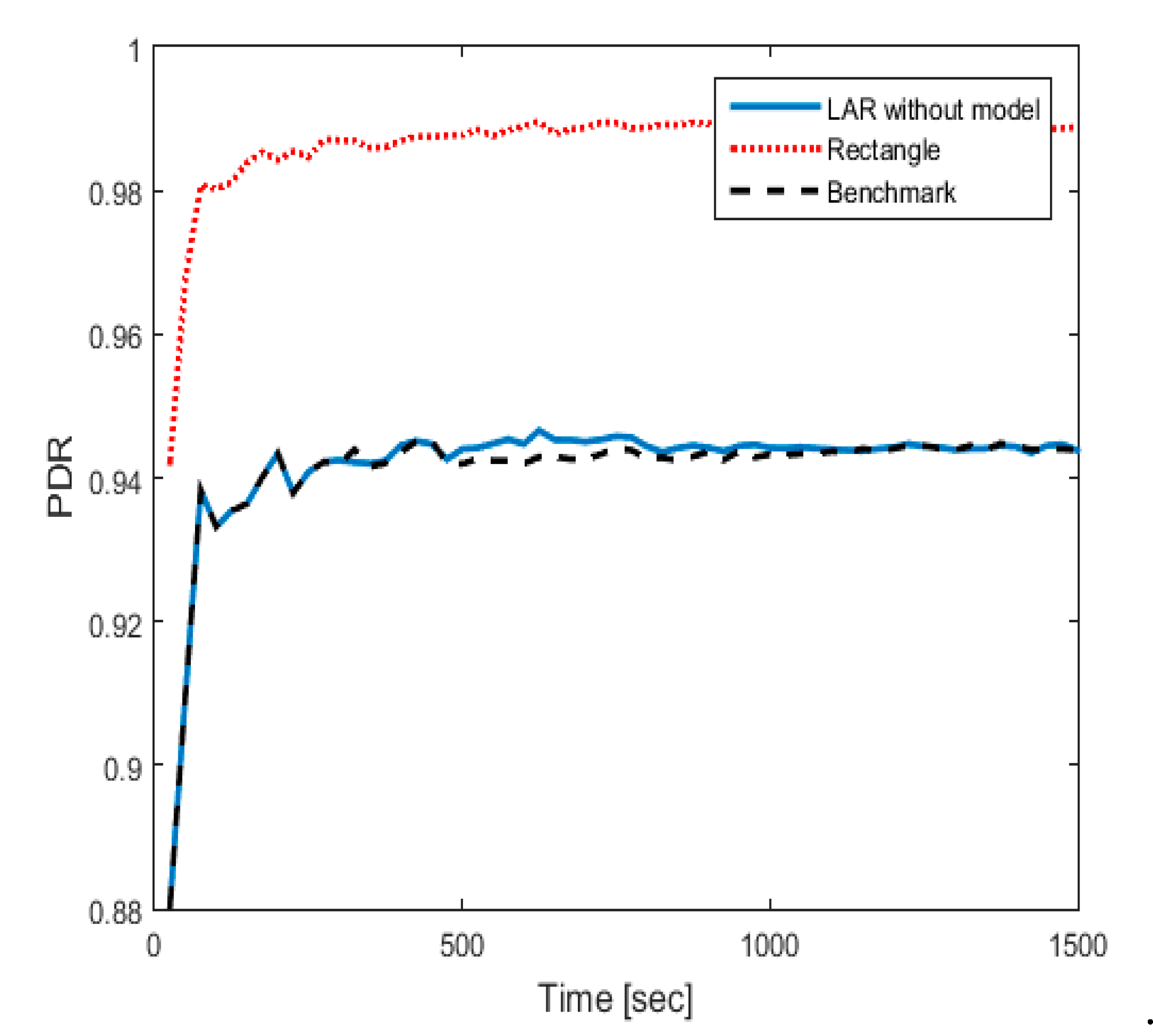
- Packet Delivery Ratio (PDR): This is the number of the packet received divided by the number of the packet sent;
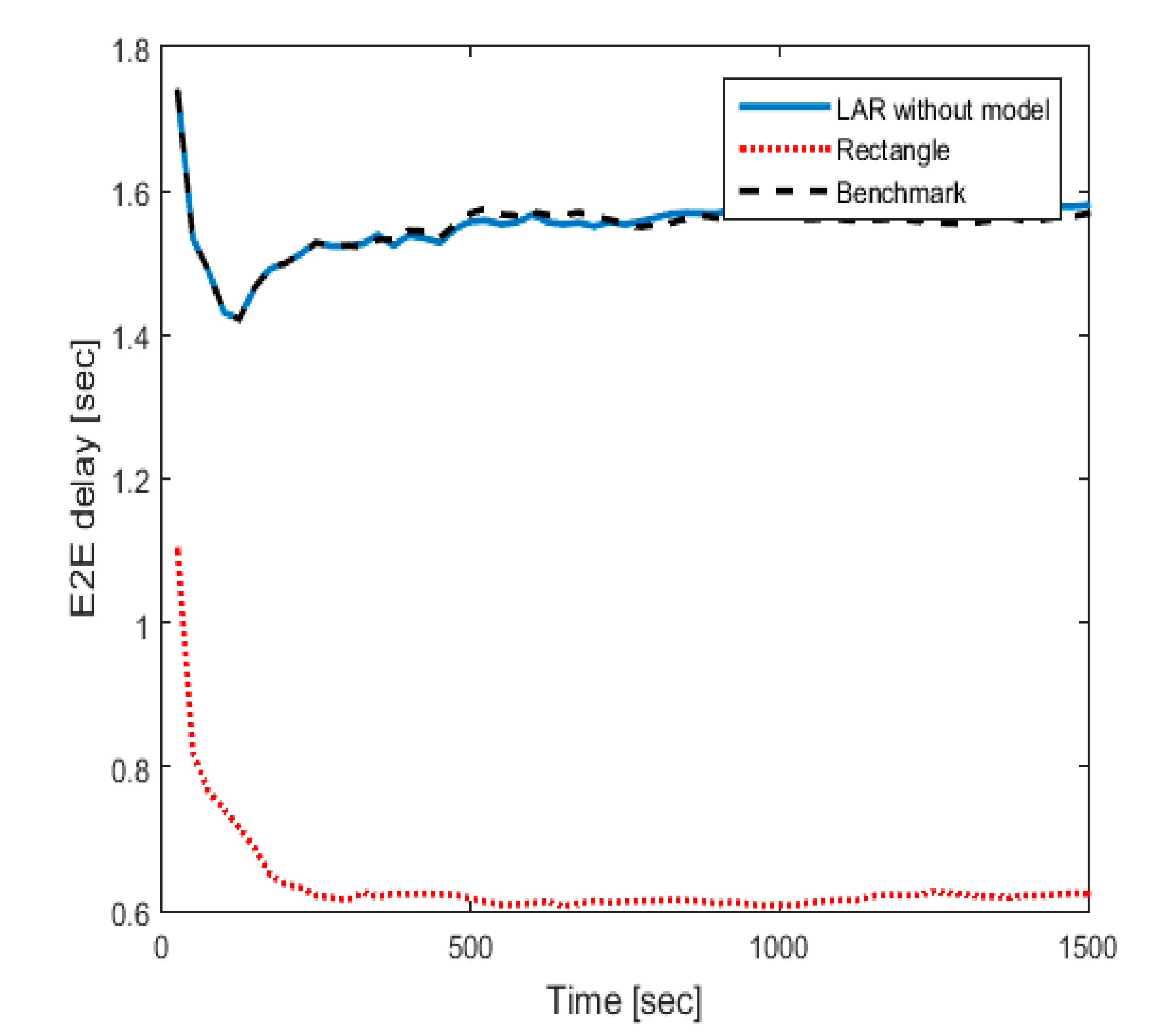
- Average End-to-End Delay (E2E Delay): This is the difference of time between the packet arrival and packet send packet divided by the total number packet;
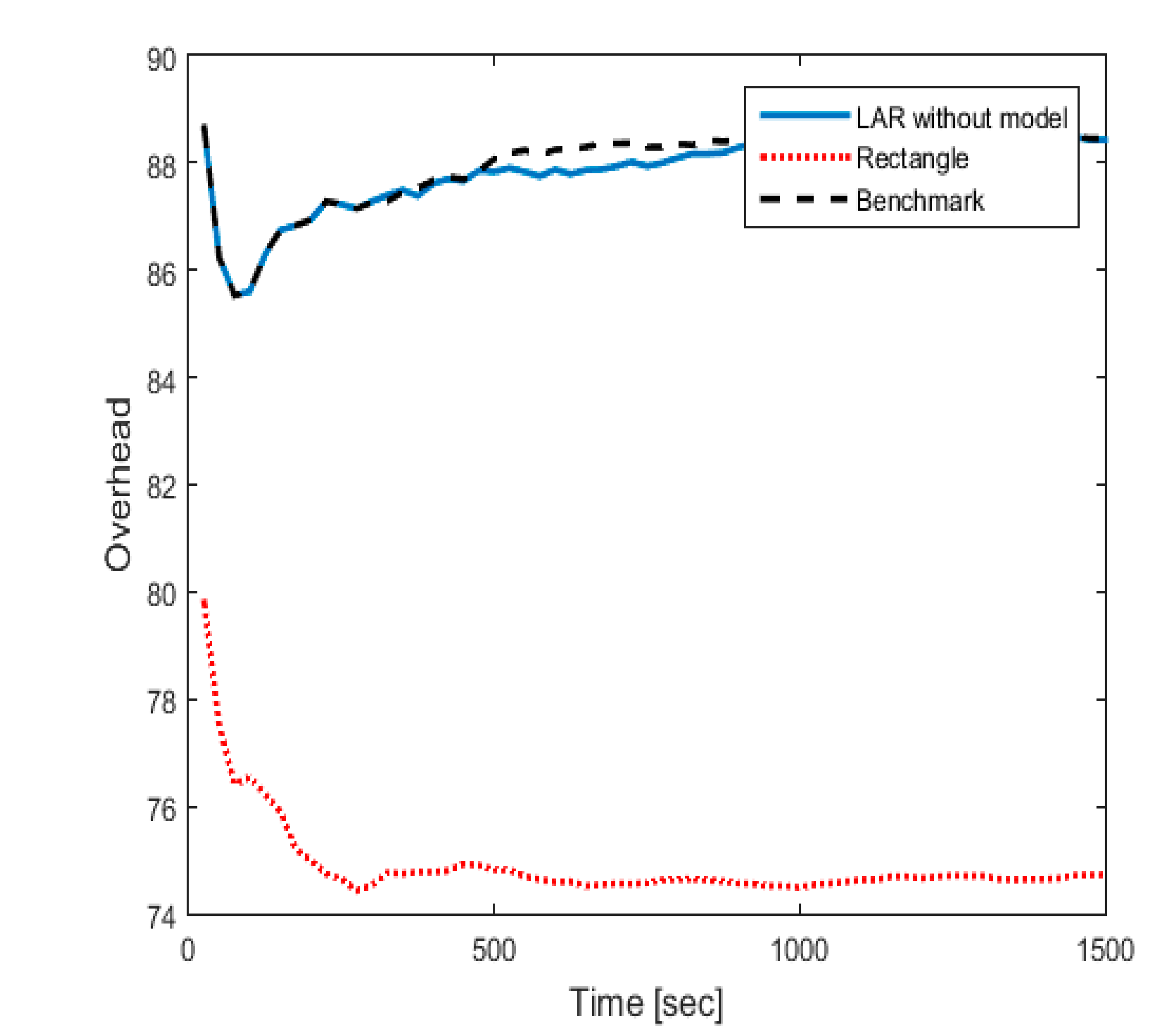
- Routing Overhead: The routing overhead metric refers to the total number of routing packets divided by the total number of delivered data packets [45];
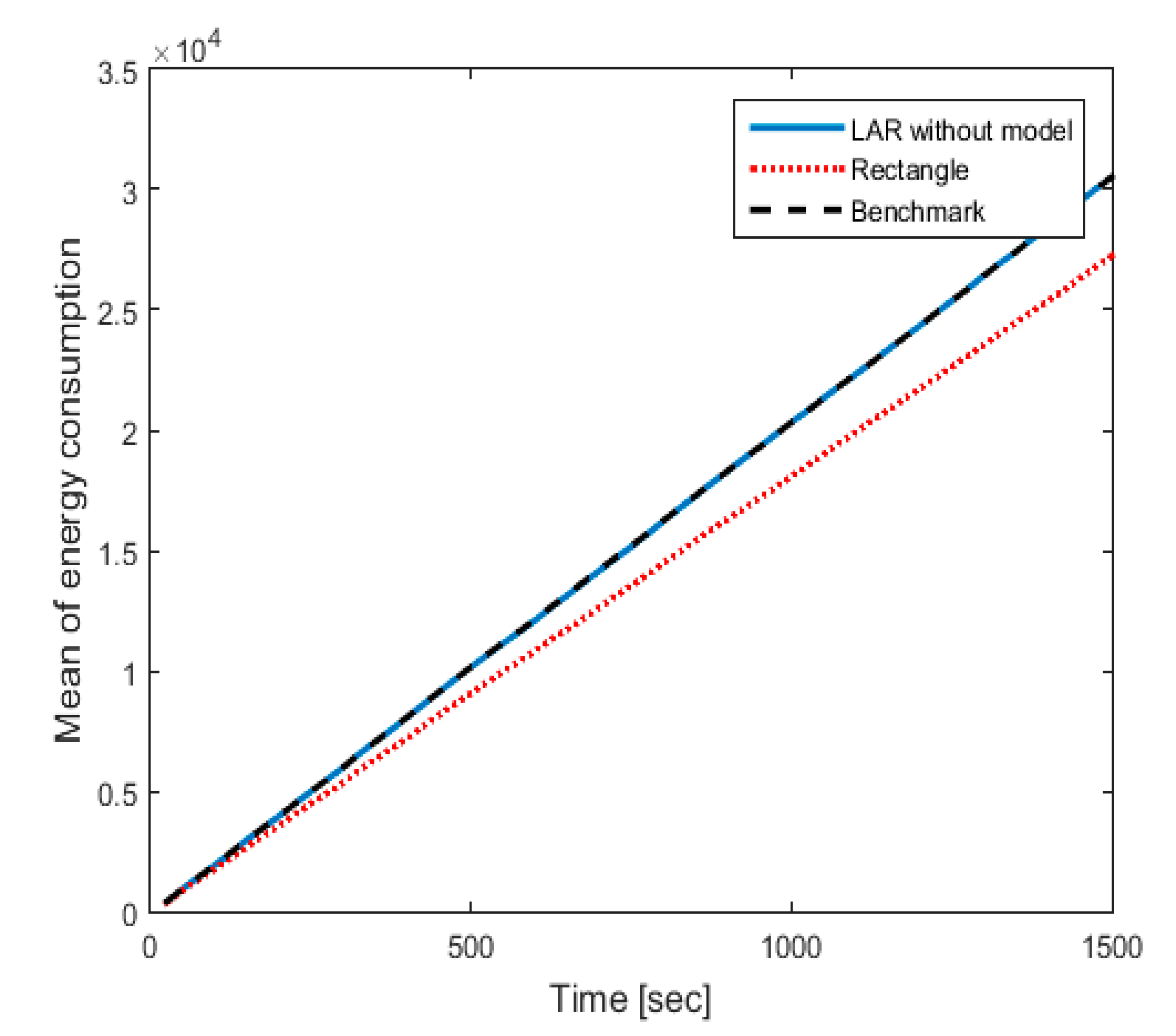
- Average Energy Consumption: This is the total energy consumed by each node in the network divided by its initial energy [46].
5. Results and Discussion
5.1. Packet Delivery Ratio (PDR)
5.2. Average End-to-End Delay (E2E Delay)
5.3. Routing Overhead
5.4. Average Energy Consumption
6. Conclusions
7. Limitation and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Di Maio, A.; Palattella, M.R.; Engel, T. Performance analysis of MANET routing protocols in urban VANETs. In Proceedings of the International Conference on Ad-Hoc Networks and Wireless, Luxembourg, 1–3 October 2019; pp. 432–451. [Google Scholar]
- Jubair, M.A.; Mostafa, S.A.; Muniyandi, R.C.; Mahdin, H.; Mustapha, A.; Hassan, M.H.; Mahmoud, M.A.; Al-Jawhar, Y.A.; Al-Khaleefa, A.S.; Mahmood, A.J. Bat optimized link state routing protocol for energy-aware mobile ad-hoc networks. Symmetry 2019, 11, 1409. [Google Scholar] [CrossRef]
- Tomar, R.; Prateek, M.; Sastry, H.G. Analysis of beaconing performance in IEEE 80211 p on vehicular ad-hoc environment. In Proceedings of the 4th IEEE Uttar Pradesh Section International Conference on Electrical, Computer and Electronics (UPCON), Mathura, India, 26–28 October 2017; pp. 692–696. [Google Scholar]
- Ali, I.; Hassan, A.; Li, F. Authentication and privacy schemes for vehicular ad hoc networks (VANETs): A survey. Veh. Commun. 2019, 16, 45–61. [Google Scholar] [CrossRef]
- Malathy, S.; Porkodi, V.; Sampathkumar, A.; Hindia, M.N.; Dimyati, K.; Tilwari, V.; Qamar, F.; Amiri, I.S. An optimal network coding based backpressure routing approach for massive IoT network. Wirel. Netw. 2020, 26, 3657–3674. [Google Scholar] [CrossRef]
- Kumar, S.; Verma, A.K. Position based routing protocols in VANET: A survey. Wirel. Pers. Commun. 2015, 83, 2747–2772. [Google Scholar] [CrossRef]
- Patel, A.; Kaushik, P. Improving QoS of VANET using adaptive CCA range and transmission range both for intelligent transportation system. Wirel. Pers. Commun. 2018, 100, 1063–1098. [Google Scholar] [CrossRef]
- Hussein, A.; Elhajj, I.H.; Chehab, A.; Kayssi, A. SDN VANETs in 5G: An architecture for resilient security services. In Proceedings of the Fourth International Conference on Software Defined Systems (SDS), Valencia, Spain, 8–11 May 2017; pp. 67–74. [Google Scholar]
- Rasheed, A.; Gillani, S.; Ajmal, S.; Qayyum, A. Vehicular ad hoc network (VANET): A survey, challenges, and applications. In Vehicular Ad-Hoc Networks for Smart Cities; Springer: Singapore, 2017; pp. 39–51. [Google Scholar]
- Kumar, P.; Verma, A.; Singhal, P. VANET Protocols with Challenges-A Review. In Proceedings of the 6th International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 13–15 March 2019; pp. 598–602. [Google Scholar]
- Rath, M.; Pati, B.; Swain, J. Communiqué issues in MANET and VANET protocols with network security disquiet. In Forensic Investigations and Risk Management in Mobile and Wireless Communications; IGI Global: Hershey, PA, USA, 2020; pp. 195–220. [Google Scholar]
- Tilwari, V.; Hindia, M.N.; Dimyati, K.; Qamar, F.; Talip, A.; Sofian, M. Contention window and residual battery aware multipath routing schemes in mobile ad-hoc networks. Int. J. Technol. 2019, 10, 1376–1384. [Google Scholar] [CrossRef]
- Sharma, S.; Sharma, P. Comprehensive study of various routing protocols in VANET. In Proceedings of the International Conference on Intelligent Computing and Control Systems (ICCS), Madurai, India, 15–17 May 2019; pp. 1272–1275. [Google Scholar]
- Rana, K.K.; Tripathi, S.; Raw, R.S. opportunistic directional location aided routing protocol for vehicular ad-hoc network. Wirel. Pers. Commun. 2020, 110, 1217–1235. [Google Scholar] [CrossRef]
- Chekkouri, A.S.; Ezzouhairi, A.; Pierre, S. A new integrated VANET-LTE-A architecture for enhanced mobility in small cells HetNet using dynamic gateway and traffic forwarding. Comput. Netw. 2018, 140, 15–27. [Google Scholar] [CrossRef]
- Mustafa, Q.A.-S.; Muniyandi, R.C. Optimised tail-based routing for VANETs using multi-objective particle swarm optimisation with angle searching. Int. J. Adv. Comput. Sci. Appl. 2020, 11, 224–232. [Google Scholar] [CrossRef]
- Kumar, A.; Dadheech, P.; Kumari, R.; Singh, V. An enhanced energy efficient routing protocol for VANET using special cross over in genetic algorithm. J. Stat. Manag. Syst. 2019, 22, 1349–1364. [Google Scholar] [CrossRef]
- Gurumoorthi, E.; Ayyasamy, A. Cache agent based location aided routing protocol using direction for performance enhancement in VANET. Wirel. Pers. Commun. 2019, 109, 1195–1216. [Google Scholar] [CrossRef]
- Pandey, K.; Raina, S.K.; Raw, R.S.; Singh, B. Throughput and delay analysis of directional-location aided routing protocol for vehicular ad hoc networks. Int. J. Commun. Syst. 2017, 30, e3192. [Google Scholar] [CrossRef]
- Singh, G.D.; Tomar, R.; Sastry, H.G.; Prateek, M. A review on VANET routing protocols and wireless standards. In Smart Computing and Informatics; Springer: Singapore, 2018; pp. 329–340. [Google Scholar]
- Wahid, I.; Ikram, A.A.; Ahmad, M.; Ali, S.; Ali, A. State of the art routing protocols in VANETs: A review. Procedia Comput. Sci. 2018, 130, 689–694. [Google Scholar] [CrossRef]
- Kaushal, S.K.; Singh, V.; Nagar, J.; Raw, R.S. Performance analysis of angular location aided routing (A-LAR) in VANETs. In Proceedings of the International Conference on Communication and Computing Systems (ICCCS), Kracow, Poland, 11–14 July 2017. [Google Scholar]
- Jaiswal, R.K.; Jaidhar, C. Location prediction algorithm for a nonlinear vehicular movement in VANET using extended Kalman filter. Wirel. Netw. 2017, 23, 2021–2036. [Google Scholar] [CrossRef]
- Rohani, M.; Gingras, D.; Gruyer, D. A novel approach for improved vehicular positioning using cooperative map matching and dynamic base station DGPS concept. IEEE Trans. Intell. Transp. Syst. 2016, 17, 230–239. [Google Scholar] [CrossRef]
- Nabil, M.; Hajami, A.; Haqiq, A. Improvement of route lifetime of LAR protocol for VANET in highway scenario. In Proceedings of the 12th ACS/IEEE International Conference on Computer Systems and Applications (AICCSA), Marrakech, Morocco, 17–20 November 2015; pp. 1–8. [Google Scholar]
- Kumar, N.; Rodrigues, J.J.; Lloret, J.; Dua, A. Replication-aware data dissemination for vehicular ad hoc networks using location determination. Mob. Netw. Appl. 2015, 20, 251–267. [Google Scholar] [CrossRef]
- Rana, K.K.; Tripathi, S.; Raw, R.S. Analytical analysis of improved directional location added routing protocol for VANETS. Wirel. Pers. Commun. 2018, 98, 2403–2426. [Google Scholar] [CrossRef]
- Khaleghitabar, A.; Farazkish, R. A New method for routing optimization in vehicular ad hoc networks (VANETs). Signal Process. Renew. Energy 2019, 3, 37–45. [Google Scholar]
- ABDALI, A.; Muniyandi, R.C. Optimized Model for energy Aware Location Aided Routing Protocol in MANET. Int. J. Appl. Eng. Res. 2017, 12, 4631–4637. [Google Scholar]
- AL-Dhief, F.T.; Muniyandi, R.C.; Sabri, N. Performance evaluation of LAR and OLSR routing protocols in forest fire detection using mobile ad-hoc network. Indian J. Sci. Technol. 2016, 9, 1–9. [Google Scholar] [CrossRef]
- Srivastava, A.; Prakash, A.; Tripathi, R. Location based routing protocols in VANET: Issues and existing solutions. Veh. Commun. 2020, 23, 100231. [Google Scholar] [CrossRef]
- Gurumoorthi, E.; Ayyasamy, A. Cache agent based location aided routing using distance and direction for performance enhancement in VANET. Telecommun. Syst. 2020, 73, 419–432. [Google Scholar] [CrossRef]
- Song, C. Performance analysis of the IEEE 802.11 p multichannel MAC protocol in vehicular ad hoc networks. Sensors 2017, 17, 2890. [Google Scholar] [CrossRef]
- Mezher, A.M.; Cárdenas, L.L.; Barrera, J.C.; Guerra, E.C.; Meng, J.; Igartua, M.A. Improved selection of the Best forwarding candidate in 3MRP for VANETs. In Proceedings of the 2019 IEEE Symposium on Computers and Communications (ISCC), Barcelona, Spain, 29 June–3 July 2019; pp. 1–6. [Google Scholar]
- Nazib, R.A.; Moh, S. Routing protocols for unmanned aerial vehicle-aided vehicular ad hoc networks: A Survey. IEEE Access 2020, 8, 77535–77560. [Google Scholar] [CrossRef]
- Hassan, M.H.; Muniyandi, R.C. An improved hybrid technique for energy and delay routing in mobile ad-hoc networks. Int. J. Appl. Eng. Res. 2017, 12, 134–139. [Google Scholar]
- Brendha, R.; Prakash, V.S.J. A survey on routing protocols for vehicular Ad Hoc networks. In Proceedings of the 4th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 6–7 January 2017; pp. 1–7. [Google Scholar]
- Abbasi, H.I.; Voicu, R.C.; Copeland, J.; Chang, Y. Towards fast and reliable multi-hop routing in VANETs. IEEE Trans. Mob. Comput. 2019. [CrossRef]
- Zhang, G.; Wu, M.; Duan, W.; Huang, X. Genetic algorithm based QoS perception routing protocol for VANETs. Wirel. Commun. Mob. Comput. 2018, 3897857. [Google Scholar] [CrossRef]
- Cloudin, S.; Kumar, P.M. Challenges on Mobility Models Suitable to Vanet. J. Softw. 2017, 12, 91–100. [Google Scholar]
- Loidl, M.; Wallentin, G.; Cyganski, R.; Graser, A.; Scholz, J.; Haslauer, E. GIS and transport modeling—Strengthening the spatial perspective. Isprs Int. J. Geo-Inf. 2016, 5, 84. [Google Scholar] [CrossRef]
- O’Neil-Dunne, J.; Grove, M. TIGER Road. ND GIS Hub: Bismarck, NC, USA, 2019. [Google Scholar]
- Tarapiah, S.; Aziz, K.; Atalla, S. Analysis the performance of vehicles ad hoc network. Procedia Comput. Sci. 2017, 124, 682–690. [Google Scholar] [CrossRef]
- Sallum, E.E.A.; dos Santos, G.; Alves, M.; Santos, M.M. Performance analysis and comparison of the DSDV, AODV and OLSR routing protocols under VANETs. In Proceedings of the 16th International Conference on Intelligent Transportation Systems Telecommunications (ITST), Lisboa, Portugal, 15–17 October 2018; pp. 1–7. [Google Scholar]
- Abbasi, I.A.; Khan, A.S.; Ali, S. Dynamic multiple junction selection based routing protocol for VANETs in city environment. Appl. Sci. 2018, 8, 687. [Google Scholar] [CrossRef]
- Shakir, H.A.; Muniyandi, R.C.; Ali, Z.M. Energy consumption in mobile ad hoc network: Challenges and solutions. J. Theor. Appl. Inf. Technol. 2019, 97, 755–764. [Google Scholar]
- Cárdenas, L.L.; Mezher, A.M.; Bautista, P.A.B.; Igartua, M.A. A probability-based multimetric routing protocol for vehicular ad hoc networks in urban scenarios. IEEE Access 2019, 7, 178020–178032. [Google Scholar] [CrossRef]
- Lemus Cárdenas, L.; Mohamad Mezher, A.; López Márquez, N.P.; Barbecho Bautista, P.; Cárdenas-Barrera, J.; Aguilar igartua, M. 3MRP+ an improved multimetric geographical routing protocol for VANETs. In Proceedings of the 15th ACM International Symposium on Performance Evaluation of Wireless Ad Hoc, Sensor, & Ubiquitous Networks, Montreal, QC, Canada, 28 October–2 November 2018; pp. 33–39. [Google Scholar]
- Virdis, A.; Kirsche, M. Recent Advances in Network Simulation: The OMNeT++ Environment and Its Ecosystem. Springer: Cham, Switzerland, 2019. [Google Scholar]
- Al-khatib, A.A.; Hassan, R. Performance evaluation of AODV, DSDV, and DSR routing protocols in MANET using NS-2 simulator. In Proceedings of the International Conference of Reliable Information and Communication Technology, Springer, Cham, Switzerland; 2017; pp. 276–284. [Google Scholar]
- Sommer, C.; Eckhoff, D.; Brummer, A.; Buse, D.S.; Hagenauer, F.; Joerer, S.; Segata, M. Veins: The open source vehicular network simulation framework. In Recent Advances in Network Simulation; Springer: Cham, Switzerland, 2019; pp. 215–252. [Google Scholar]
- Shamim Akhter, M.; Ahsan, N.; Quaderi, S.J.S.; Al Forhad, M.A.; Sumit, S.H.; Rahman, M.R. A SUMO based simulation framework for intelligent traffic management system. J. Traffic Logist. Eng. 2020, 8, 1–5. [Google Scholar]
- Ram, V.R.; Premasudha, B.; Suma, R. Design and implementation of a scenario-based communication model for VANETs in EXata. In Smart Intelligent Computing and Applications; Springer: Singapore, 2018; pp. 577–587. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Simulator | MATLAB |
| Channel type | Wireless |
| Number of nodes | 50 |
| Simulation time (s) | 1500 |
| Routing protocols | LAR, KALAR, RALAR |
| speed limits range (Km/h) | 60–100 |
| Moving type | Constrained in road |
| Node coverage zone (m) | 150 |
| GPS reading period (s) | 1 |
| Parameters | Values |
|---|---|
| Speed Limit (km/h) | 70–110 |
| Car Size (m) | 5 |
| Congestion distance (m) | 2 |
| Pedestrian crossing time (s) | 10 |
| Traffic jam distance (m) | 3 |
| Traffic lights | 2 |
| Number of Lanes | 2 |
| Acceleration movement (m/s2) | 1 |
| Safe Deacceleration (m/s2) | 0.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muniyandi, R.C.; Qamar, F.; Jasim, A.N. Genetic Optimized Location Aided Routing Protocol for VANET Based on Rectangular Estimation of Position. Appl. Sci. 2020, 10, 5759. https://doi.org/10.3390/app10175759
Muniyandi RC, Qamar F, Jasim AN. Genetic Optimized Location Aided Routing Protocol for VANET Based on Rectangular Estimation of Position. Applied Sciences. 2020; 10(17):5759. https://doi.org/10.3390/app10175759
Chicago/Turabian StyleMuniyandi, Ravie Chandren, Faizan Qamar, and Ahmed Naeem Jasim. 2020. "Genetic Optimized Location Aided Routing Protocol for VANET Based on Rectangular Estimation of Position" Applied Sciences 10, no. 17: 5759. https://doi.org/10.3390/app10175759
APA StyleMuniyandi, R. C., Qamar, F., & Jasim, A. N. (2020). Genetic Optimized Location Aided Routing Protocol for VANET Based on Rectangular Estimation of Position. Applied Sciences, 10(17), 5759. https://doi.org/10.3390/app10175759