1. Introduction
Touchscreens have become increasingly popular in everyday electronics. This electronic visual display technology provides an enhanced user experience different than that of traditional input methods, such as a keyboard and mouse. In many applications, touchscreens are quicker and easier to use because of their direct finger to screen input method, which can help make computing resources more accessible to people who struggle with typical input methods [
1]. Moreover, by combining touchscreens with on-screen images, the operation becomes intuitive, significantly increasing operability and usefulness [
2]. Vibration sensations felt on the surface of a touchscreen, known as vibrotactile haptic feedback, are commonly used in small consumer electronics to create engaging user interfaces without the need for mechanical buttons [
3]. Studies have shown that the implementation of such haptic modules in touch displays increases input speed and input accuracy, as well as user feedback and satisfaction [
4,
5,
6]. Touchscreen modules can create a wide variety of vibrotactile sensations for users for many different applications. Coupled with visual feedback, they can provide a significantly improved user experience and help convey visual information to the visually impaired [
2,
7]. The benefits of haptic displays and devices are immense, making them highly sought after in many types of touch displays.
As the popularity of touchscreens continues to increase, the industry strives to incorporate touch interfaces in large displays to improve its functionality and versatility. Currently, large touchscreens are being considered in a multitude of applications such as large tablets, interactive kiosk systems, and automobile center control stacks [
8]. Many small touchscreen electronics utilize vibrotactile feedback; however, this feedback is lacking in the developing market for large touch displays. This is because most of the current haptic actuators used in touch displays are small and lightweight, allowing them to fit in mobile devices, but they fail to create sufficiently large vibrational sensations when used in bigger screens. Devices with large touchscreens (10-inch or larger) typically lack the capability of generating vibrotactile feedback for the users despite the many benefits offered by haptic feedback. For example, properly implementing vibrotactile feedback into the automotive center control stack would greatly improve functionality, user feedback, and safety [
5]. There exists a growing need for developing new haptic actuators capable of generating sufficient vibrotactile feedback sensations in large touchscreens.
There are currently very few haptic actuators that can produce meaningful tactile feedback for large touchscreen displays. The most important factors that make an actuator viable for large screen applications are high vibration intensity, low response time, low residual vibrations, and geometry. A study by Kaaresoja et al. showed that tactile feedback latency, or response time, did not create a significant effect on typing speed or accuracy, but did largely diminish the user’s perceived pleasantness. This makes response time still an important factor to consider when implementing haptic feedback [
9]. Some of the current actuators used for haptic feedback include eccentric rotary motor (ERM) actuators, linear resonant actuators (LRAs), piezoelectric actuators, and electrostatic actuators. Each of these commonly used actuators have many benefits but their drawbacks can make them difficult to effectively implement into large displays.
ERM actuators are the most widely used actuator for mobile devices and other simple vibration cases. This device utilizes an unbalanced mass that uses rotation to generate vibrations for the users. The ERM actuator vibration intensity is linked to the input frequency, making it not very versatile. It also has long response times (more than 100 ms) and residual vibrations from the inertia of the mass [
10]. ERM actuators also produce relatively weak vibrations due to the small size of the mass. Increasing the size of the mass would increase the vibration strength but would also accentuate the actuator’s weaknesses, making it not a feasible option for vibrotactile haptic use [
11].
Linear resonant actuators (LRA) use an electromagnet and spring mechanism to provide vibrotactile sensations. These devices are small and have a faster startup time (about 20 ms) compared to the ERM actuator, but they also produce a lot of residual vibrations and are limited in to use at their resonant frequency [
10,
11]. These actuators also cannot create sufficiently large vibration forces for large touchscreen applications. A specialized linear impact resonant actuator was developed by Pyo et al. that could be used at a wide range of frequencies with low power consumption, but it could only generate a maximum of 3 g-forces at the resonant frequency [
10]. This could be applied to mobile touchscreen applications but is still not sufficient for use in larger screens. Increasing the size of an LRA would increase the response time and greatly increase power consumption, limiting its use in large touchscreen applications [
11].
Piezoelectric or piezo actuators can create a wide variety of precise tactile sensations due to their short startup time (as little as 5 ms) and their possibility to create short-duration vibrations (under 3 milliseconds) [
10]. They also operate at a wide range of frequencies, altogether creating high-fidelity sensations. Piezo actuators can create almost any kind of one-dimensional haptic sensation with a relatively large dynamical range. However, they also create a potentially unwanted sound when actuating, whose frequency and volume depend on the material, environmental, and driving factors [
12]. Piezo actuators are very thin, which can be ideal for use in electronic devices but also makes them very fragile. Although piezo actuators could be attached to touchscreen panels to cause direct vibration, this is not desirable because of reliability and durability issues [
11]. These actuators being expensive and requiring a lot of operation power, along with the previously mentioned disadvantages, make them not ideal for large touchscreen applications.
Electrostatic actuators rely on electrostatic attraction forces to create haptic sensations. Typically, parallel plate actuation is employed in electrostatic actuators where one electrode is fixed and another is moveable via a spring, causing oscillations. The electrostatic attraction force directly depends on the electrode area, making it easy to scale up in size. Furthermore, the small distances involved can create large electrostatic fields. One important disadvantage of parallel plate actuators is the concept of snap-in. The spring restoring force is linear, while the electrostatic attraction force is not. This limits the displacement range of the electrode to about one-third of the original gap [
13]. Electrostatic actuators are often used in haptic applications that benefit from a small and flat module, which could be as little as a few microns [
14]. The easy scalability of the plates allows electrostatic actuators to be made specifically for large touchscreen applications. Frequency beating can be used in electrostatic actuators to simultaneously activate multiple mechanoreceptors on the skin which creates a multitude of unique sensations. An electrostatic beating actuator with no mechanical vibrotactile actuators was presented and characterized in a study by Joo et al. [
15]. This study exemplifies one of the many ways electrostatic actuators can be utilized. However, these devices typically still cannot create sufficiently large vibration sensations when mounted onto a touchscreen. Recently, Koo et al. studied a new electrostatic actuator, or electrostatic resonant actuator (ERA), for large touchscreen applications. In their electrostatic actuator design, they used a single electrode with high voltage inputs and a moving mass in order to increase vibration intensity. By exploiting the beat phenomenon, created by two high voltage input signals that were applied to the electrode, they demonstrated the feasibility of the actuator for large display applications [
11].
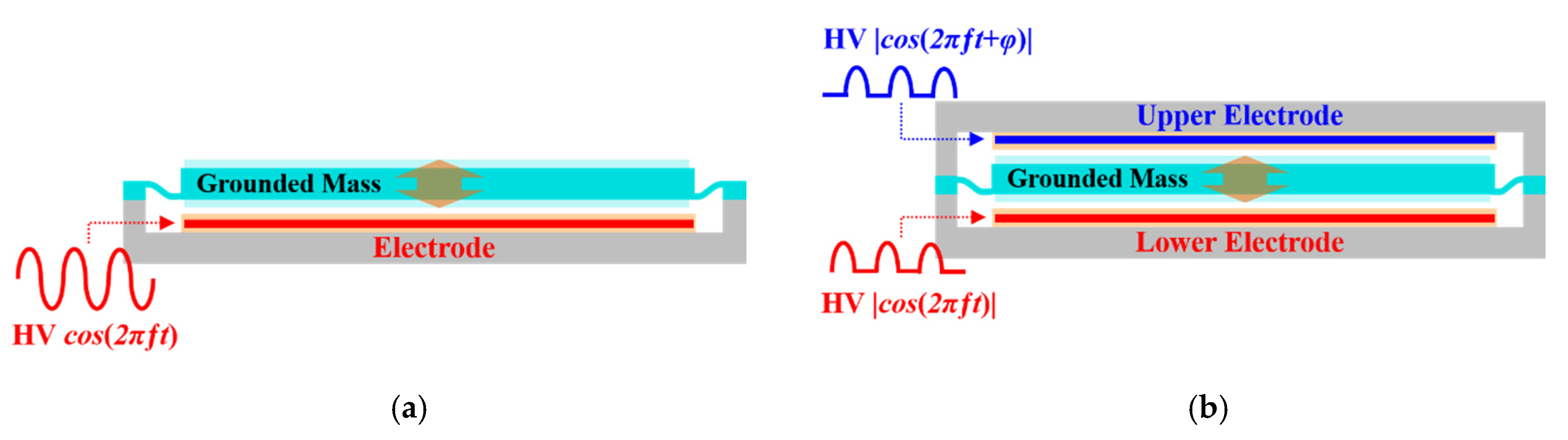
As an alternative to the single electrode ERA, this study proposes a new haptic module that incorporates two electrodes, referred to as the dual-electrode ERA design. In the proposed ERA, the additional electrode can increase the output vibration intensity when compared to that of a comparable ERA with a single electrode.
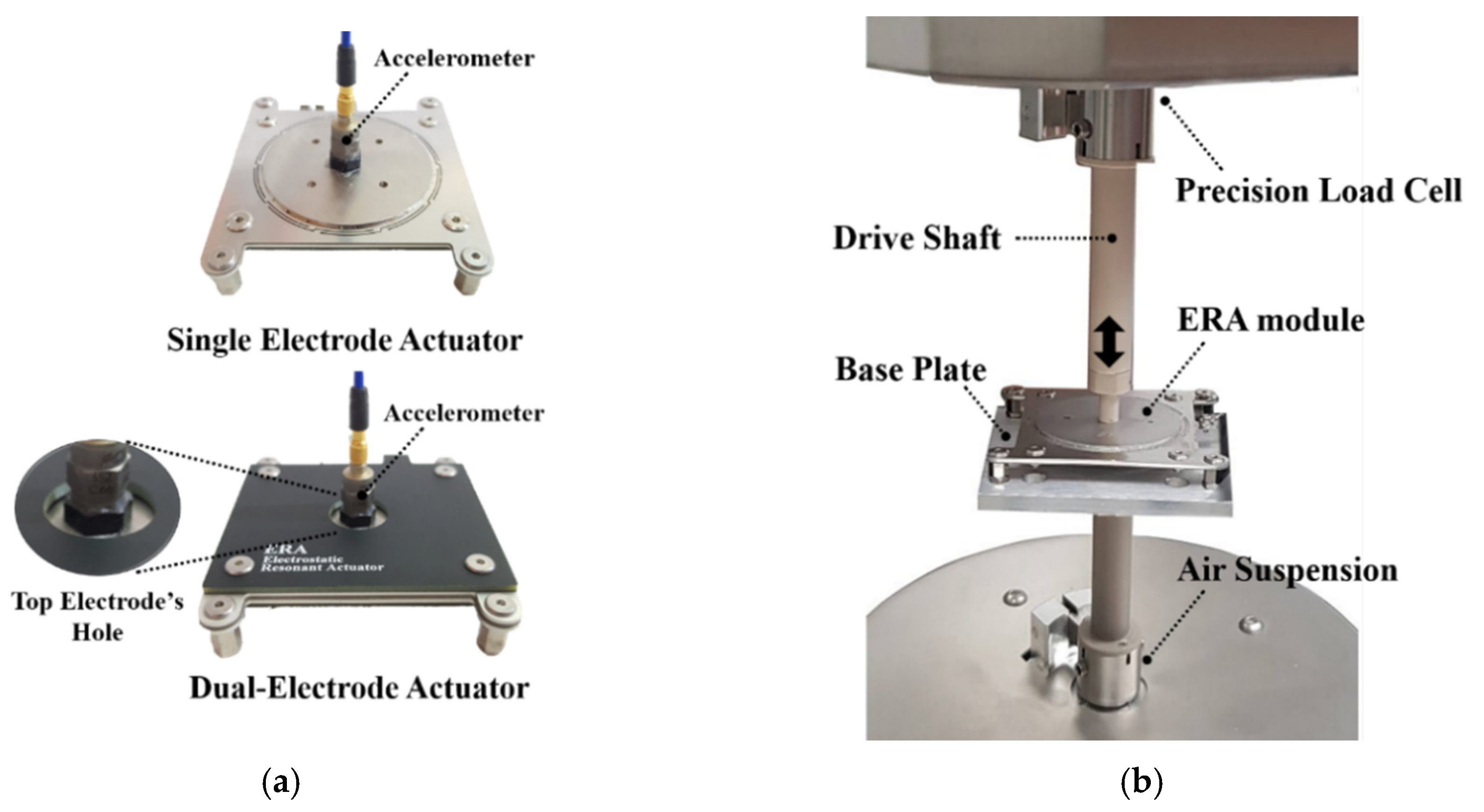
Figure 1 illustrates the electrode configurations for both electrostatic actuators.
Figure 1a shows the single-electrode actuator geometry with an electrode below the mass, and
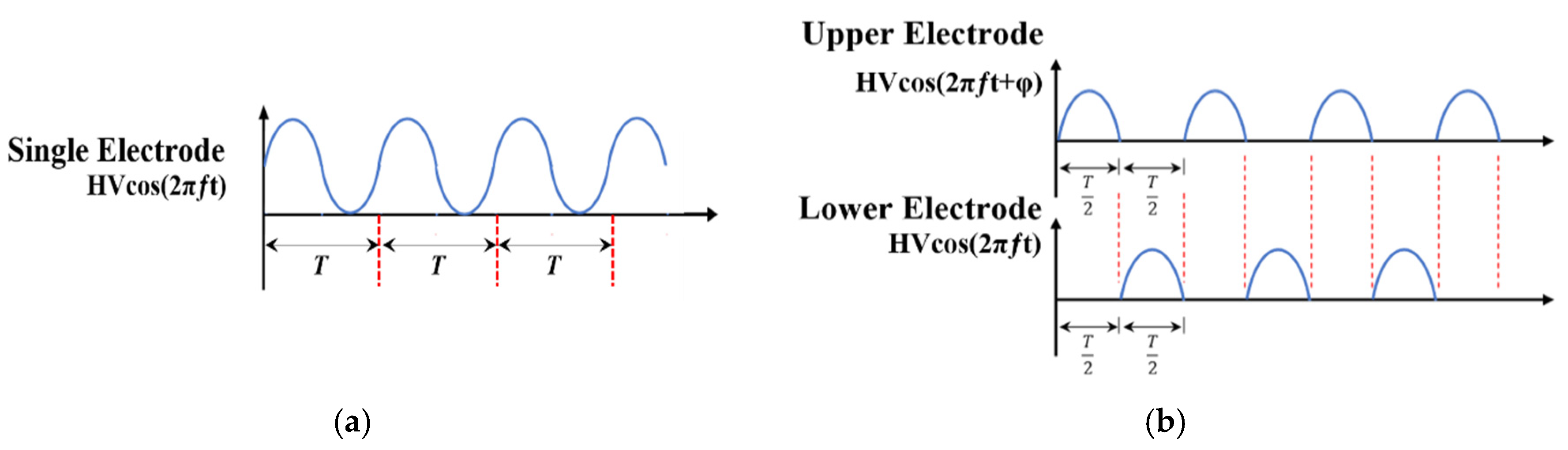
Figure 1b shows the dual-electrode actuator geometry with an electrode on each side of the mass. In the proposed two-electrode design, the electrodes are powered one at a time in an alternating fashion. This ensures that the forces generated by the upper and lower electrodes do not interfere. This was expected to significantly increase the vibration intensity of the actuator compared to using only a single electrode.
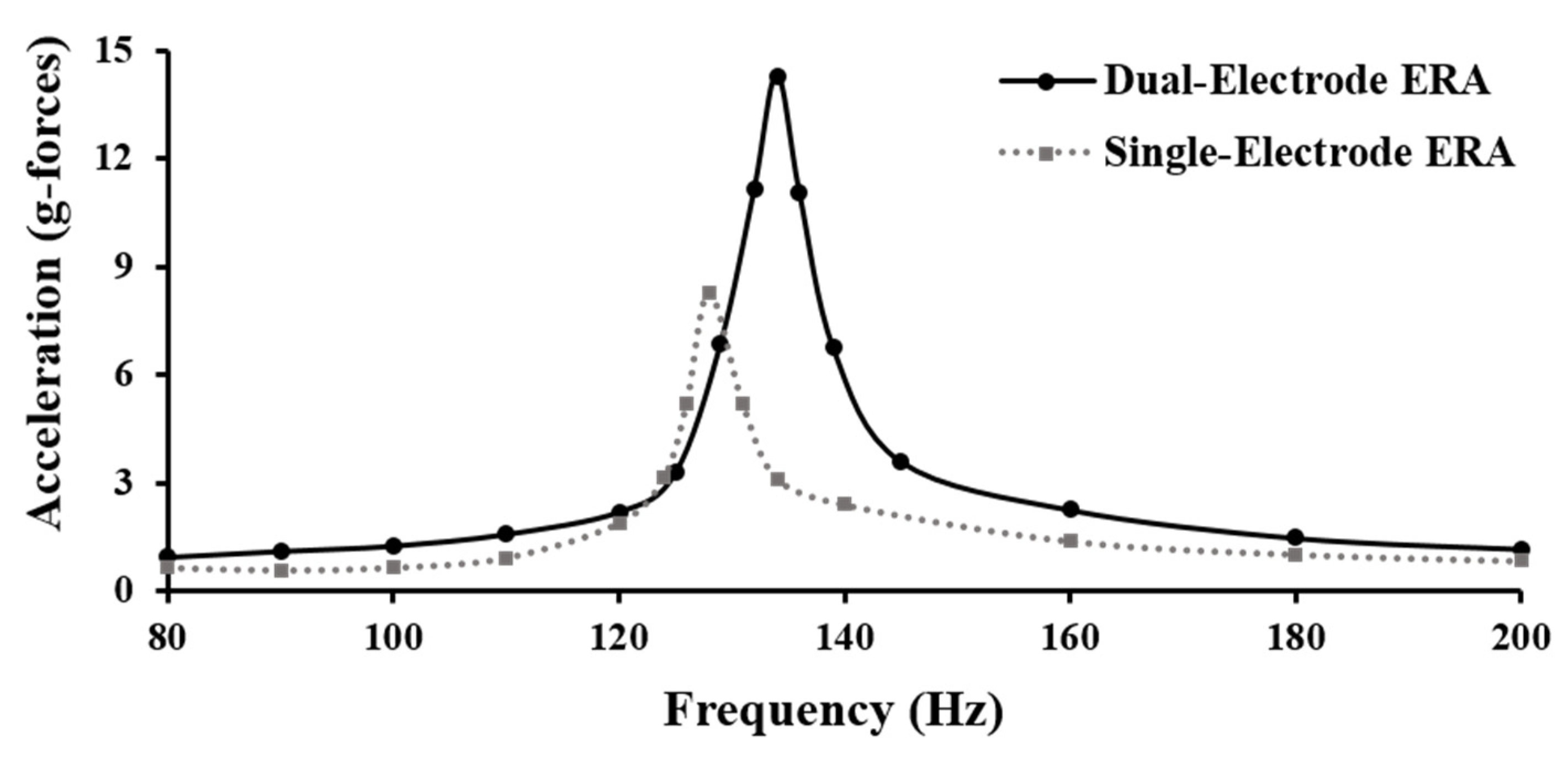
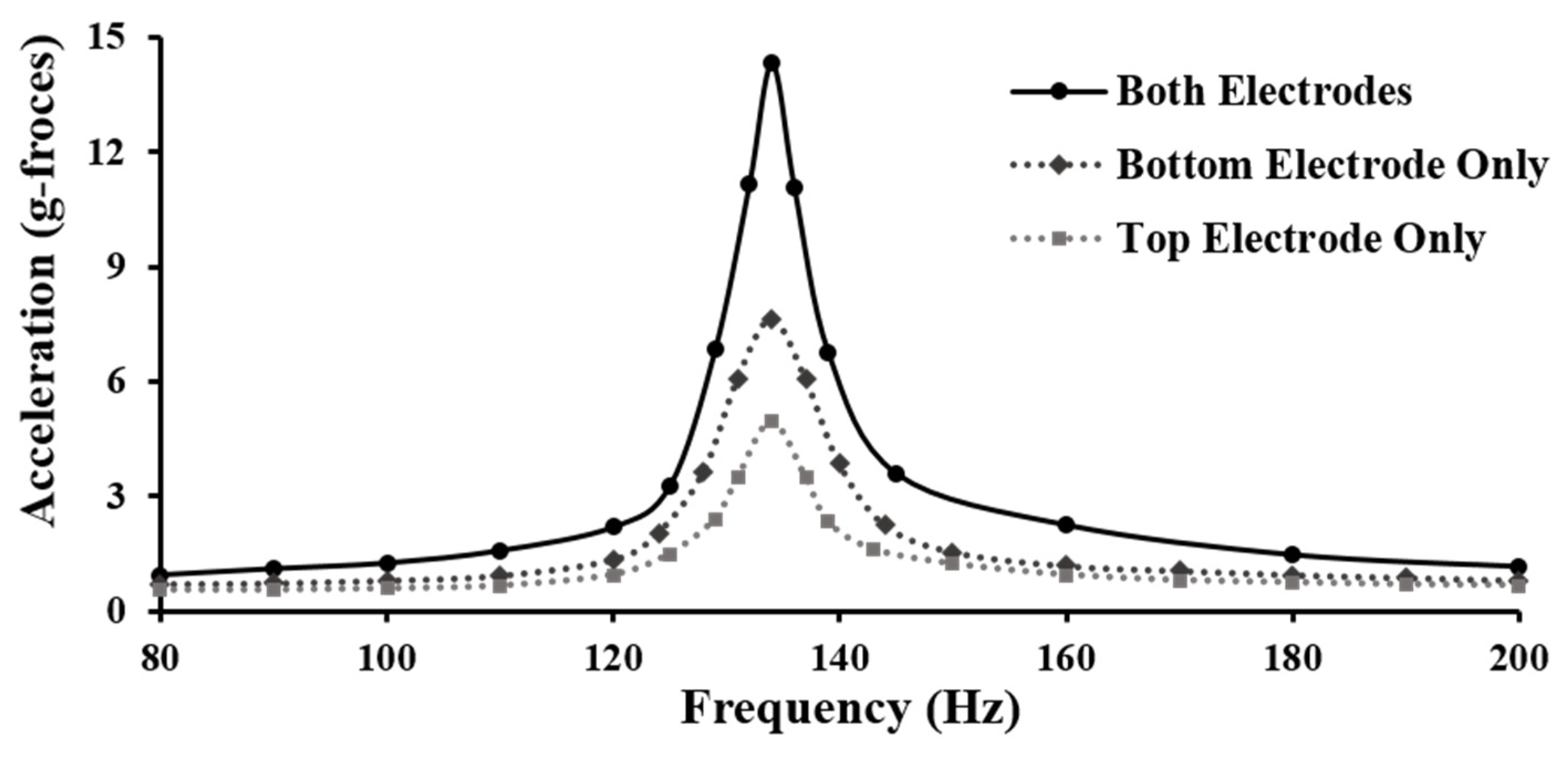
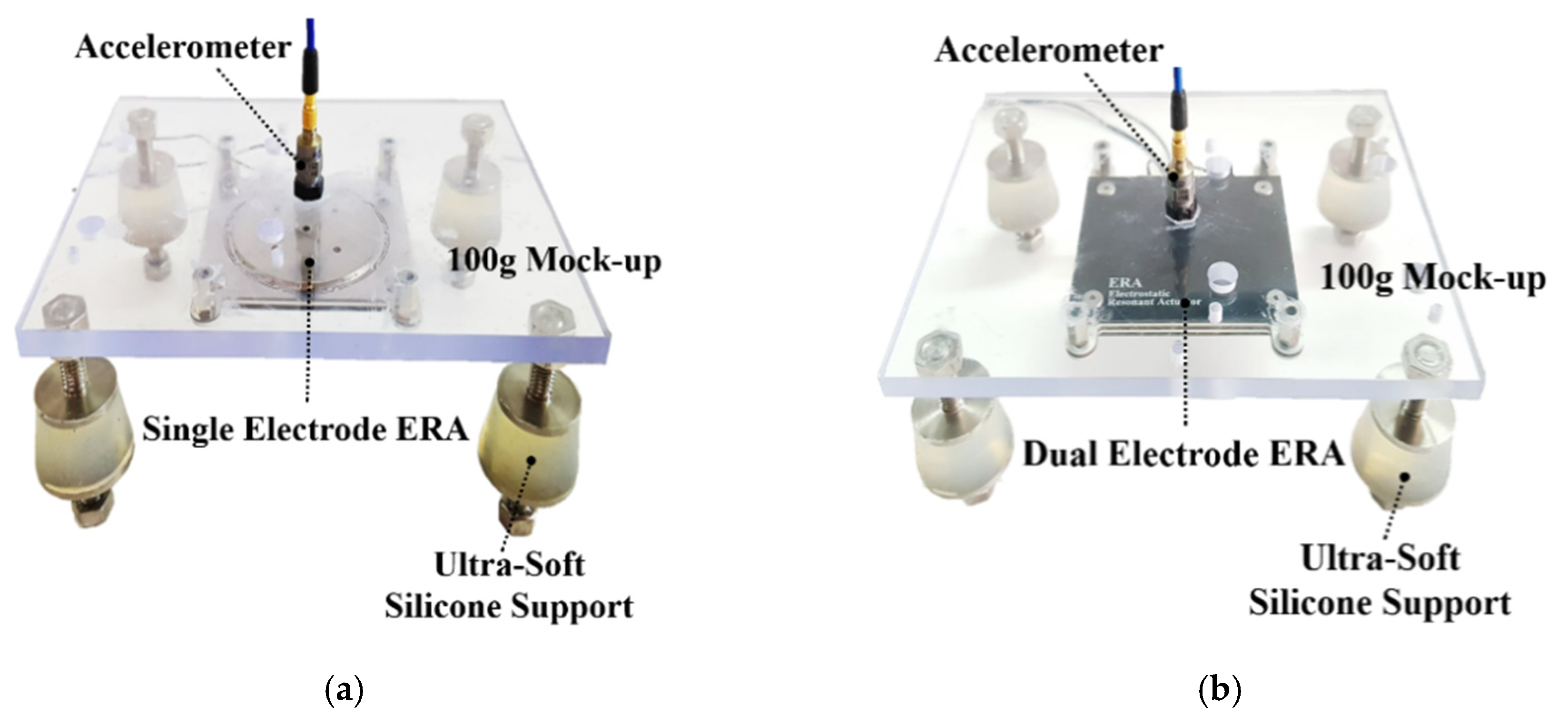
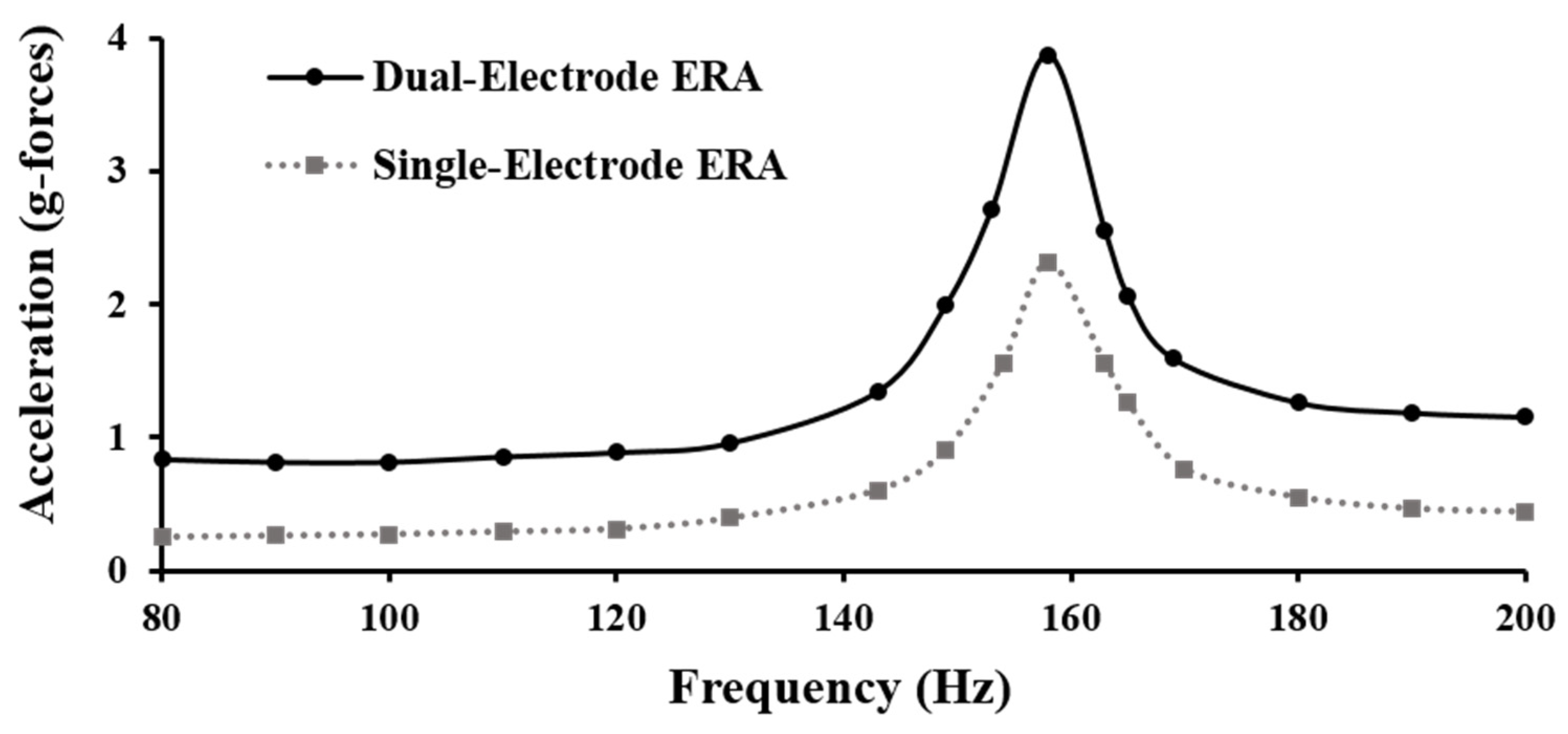
The primary goal of this study was to experimentally evaluate the effects of electrode configurations in increasing vibration intensity and to compare the performance of a single-electrode ERA to the proposed dual-electrode ERA. To this end, the dual-electrode actuator and custom controller were designed and fabricated along with a single-electrode ERA. Using the actuators, several tests were performed to identify and compare the actuators’ actual parameters to their design parameters. Following the actuation characterizations, the single-electrode and newly proposed dual-electrode actuators’ vibration performance was experimentally evaluated. Peak acceleration measurements were used to compare the performance of the actuators with both types of electrode configurations in producing vibration intensities.
The next section provides the working principle of the proposed dual-electrode actuator. After describing the construction of the actuators and the custom high voltage amplifiers in
Section 3, the paper presents experimental results.
3. Prototype and Controller Fabrication
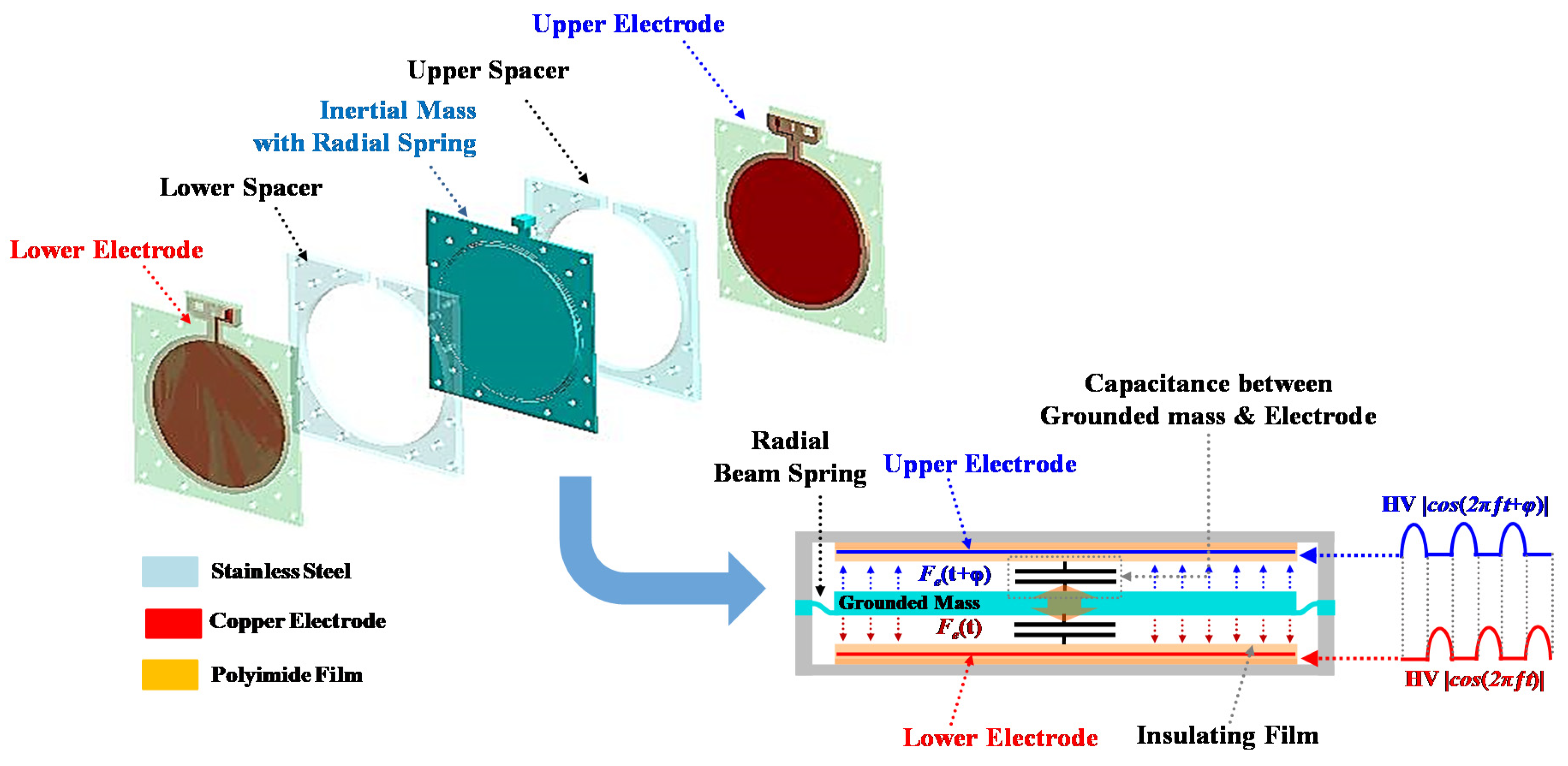
Two prototype actuators were fabricated to study the effect that electrode configuration has on the vibration intensity of the electrostatic resonant actuator module. Both actuators are proof-of-concept designs, made primarily to study the effect of adding an electrode above the mass. The dual-electrode ERA consists of five main parts: the lower electrode, the lower spacer, the inertial mass and spring, the upper spacer, and the upper electrode. Ten thin radial beam springs surround the center of the middle plate, creating a restoring force to the mass as it displaces away from its equilibrium position. This plate also has a protrusion that is used to wire the mass to electrical ground. A finite element method (FEM) simulation was performed to select the spring constant of the radial springs (see
Figure 3a). A force of 2 N was applied to the mass, resulting in a maximum displacement of 0.1166 mm. Using the given size and mass constraints, the spring stiffness was selected to be 17.15 kN/m.
In
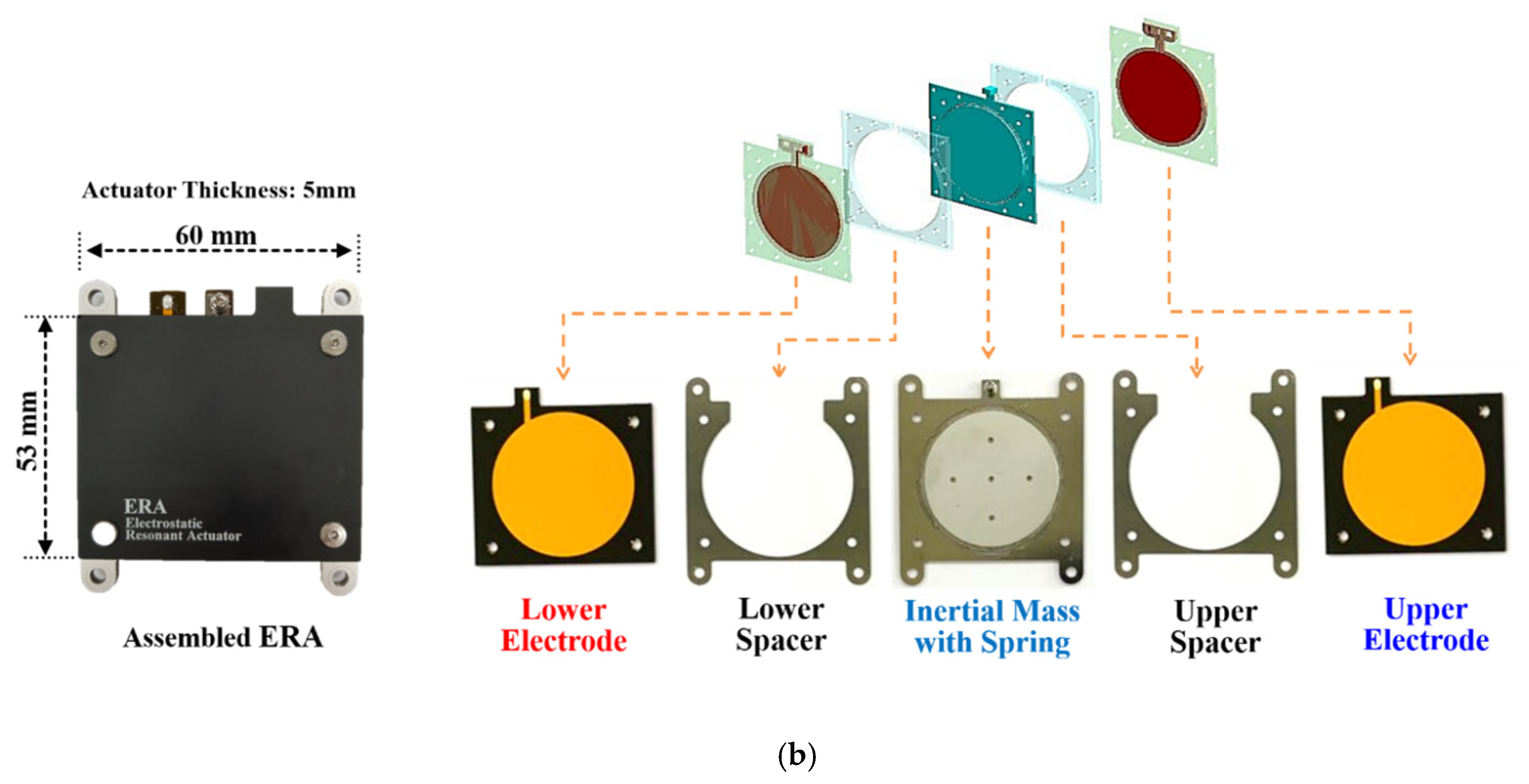
Figure 3b, each component of the actuator is separated, and its fabrication material is shown. The surface of each copper electrode closest to the mass is covered in a very thin layer of polyimide film to insulate them. The rest of the electrode is surrounded by a thicker layer of polyimide film to further insulate and support them. A stainless-steel spacer (thickness of 0.3 mm) is placed between each electrode and the mass at its equilibrium, creating an air gap, or rattle space, for the mass. The component containing the radial beam springs is a 0.5-mm-thick stainless steel plate. A stainless-steel cylinder was welded onto the center of the plate, providing significantly more mass, to increase vibration intensity. The complete assembled dual-electrode ERA is seen in the lower-left corner of
Figure 3b. The single-electrode ERA was fabricated in the same manner but does not have a top electrode or spacer.
The values of key parameters for fabricating the ERA module are summarized in
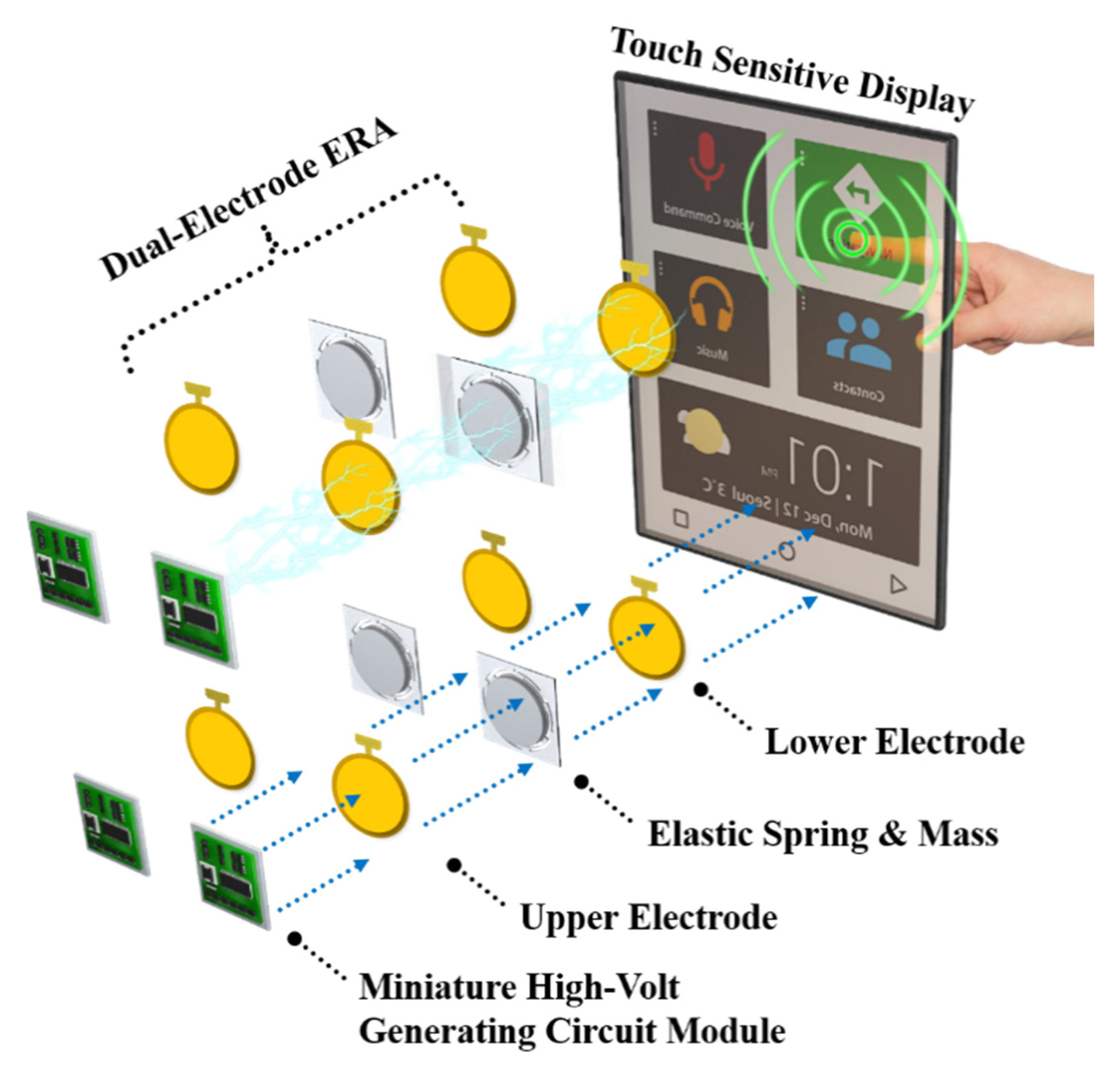
Table 1. The fabricated ERA’s overall dimensions are 52.5 mm × 60.5 mm × 3 mm. The small size makes it able to be installed on the backs of large touchscreen displays, providing effective vibrotactile haptic feedback. Moreover, multiple ERAs can be mounted over the large display surface to create various vibrotactile patterns and to enhance the overall intensity of vibrotactile feedback.
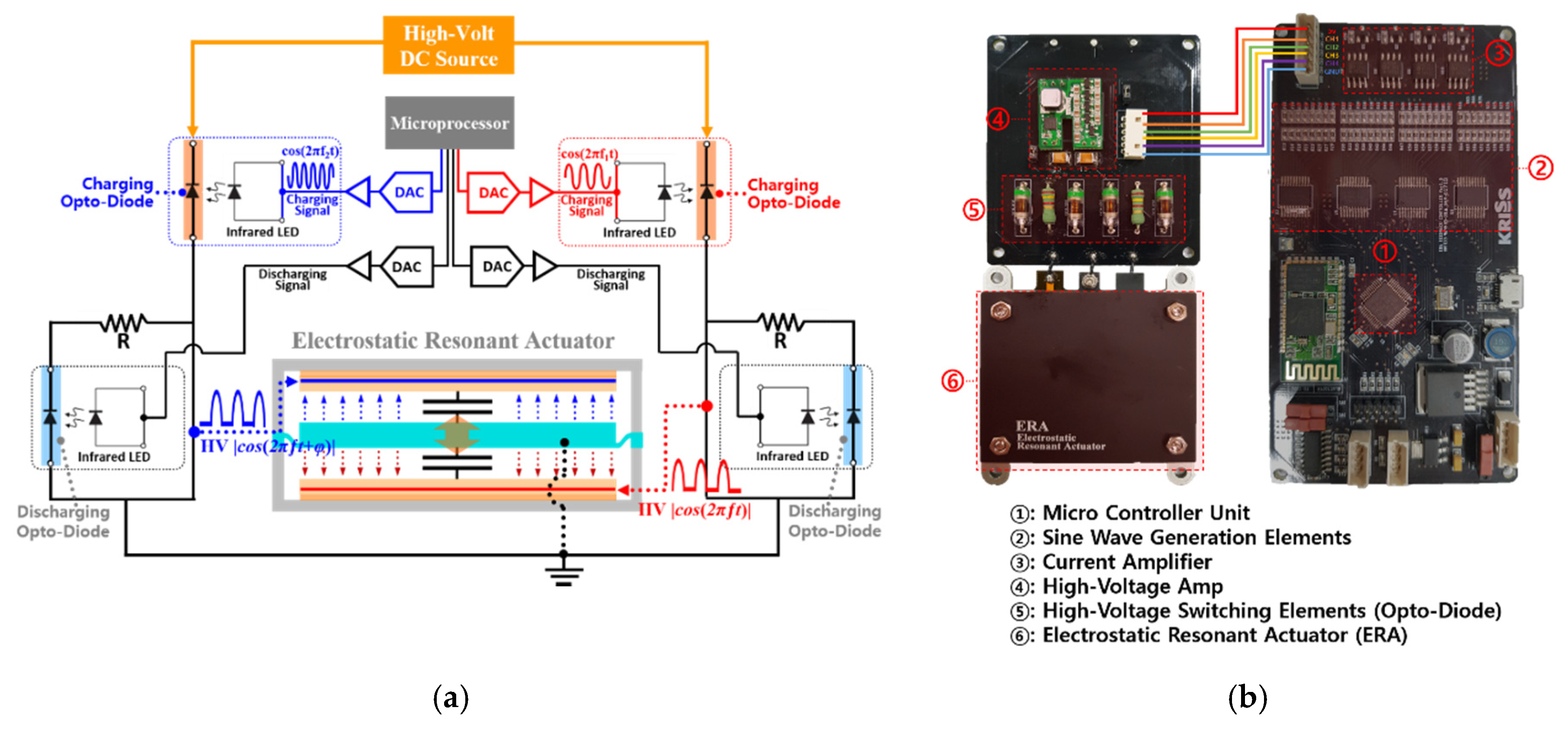
To power the electrodes and control the oscillation frequency of the module, a custom controller with a high voltage amplifier was also fabricated. The controller is necessary to alternate the powering of the electrodes in the duel-electrode actuator. The timing between each electrode activation must be accurate and consistent, making the controller highly important for the proper function of the dual-electrode ERA. The high voltage amplifier is necessary to amplify control signal inputs, which are less than 5 volts, producing the high voltage inputs required to effectively power the electrodes and activate the actuator.
Figure 4a shows the schematic structure of a circuit diagram for the controller and high voltage amplifier. These are used in combination to provide two alternating high voltage cosine signals of the same frequency to the ERA module. Ensuring that the signals provided to the electrodes are equal in magnitude and frequency is important to produce the optimal vibration performance. For the proposed ERA module, 2 kV is required for each electrode. A portable rechargeable battery, meant to act as the power source for a large touchscreen, transmits an input signal of 2 V to the high voltage amplifier which converts it to the required amount of 2 kV. This in tandem with the custom controller ensures that the ERA module functions properly and has sufficient input power.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}