Characterization of Inter-System Biases in GPS + BDS Precise Point Positioning

Abstract
1. Introduction
2. Methods
The Undifferenced GPS/BDS PPP
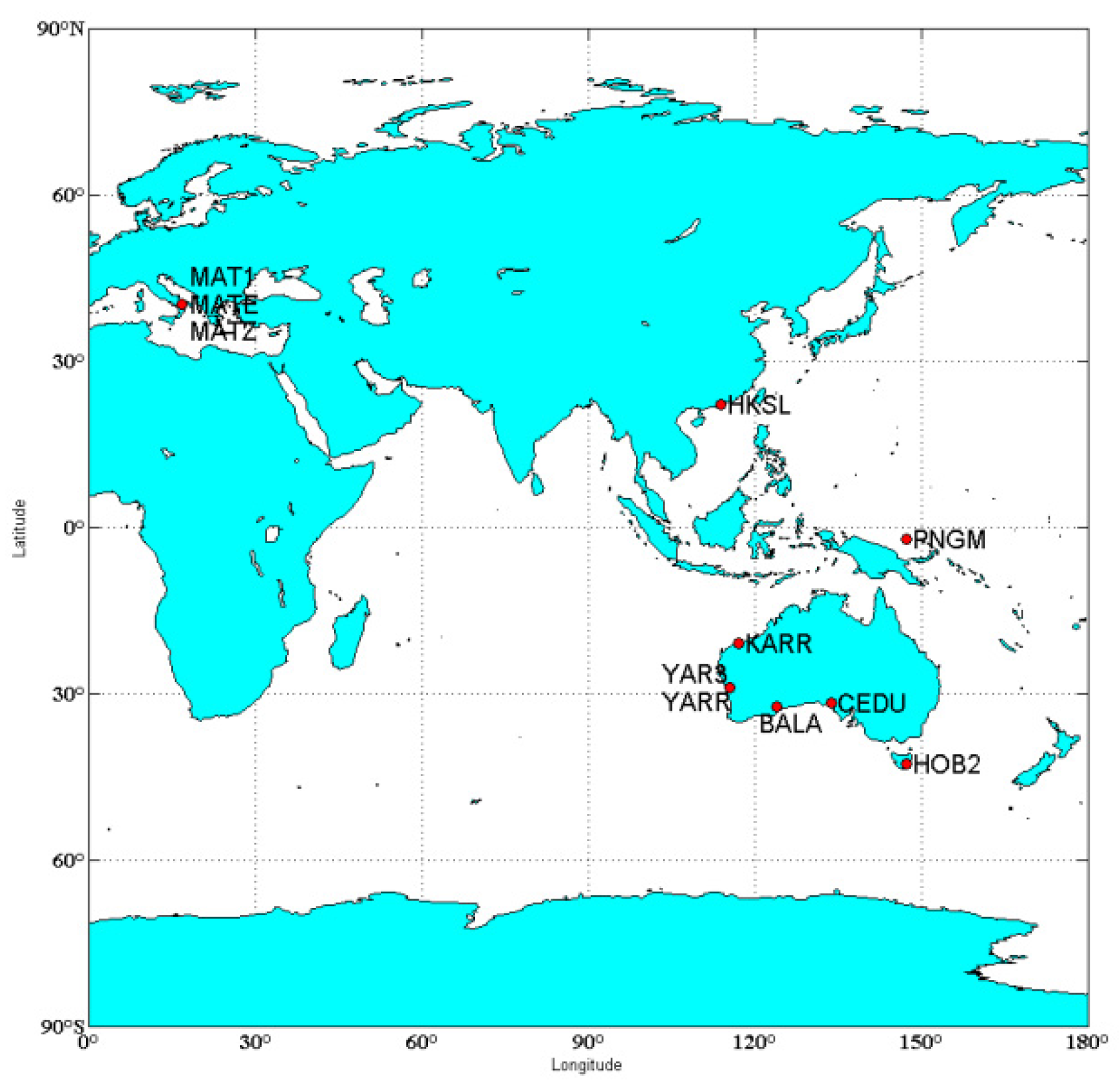
3. Processing Strategy
4. Characterization of ISB
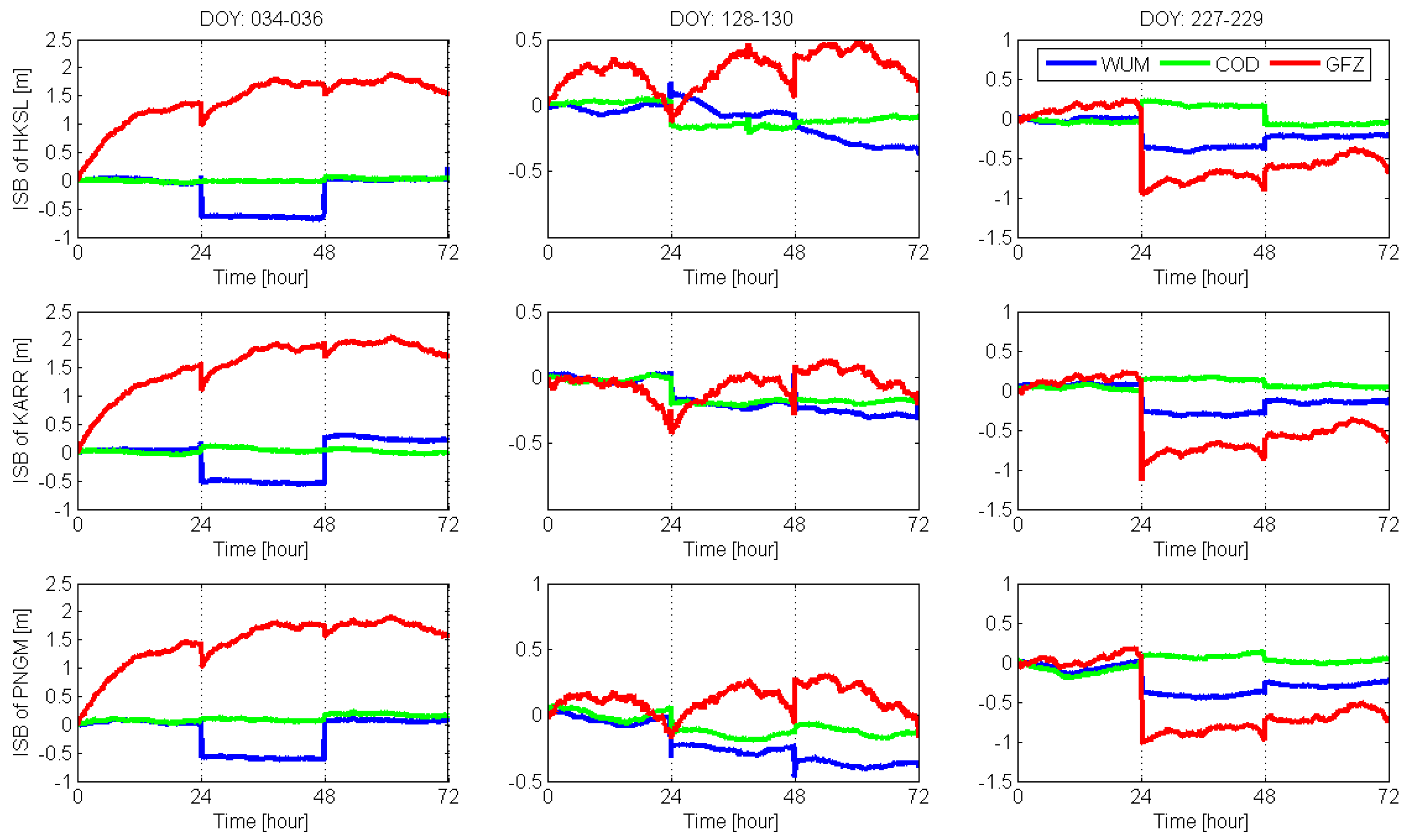
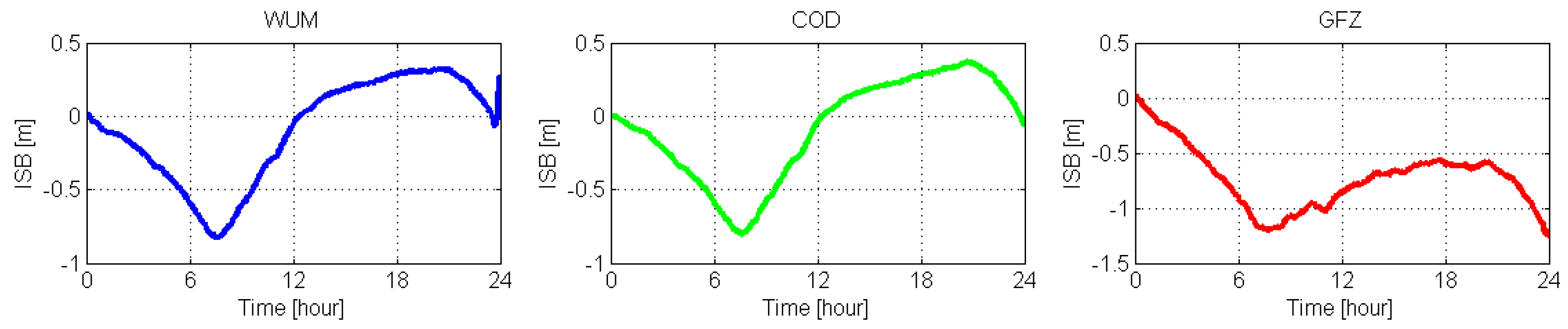
4.1. ISB Characterization Affected by the Satellite Clock Datum
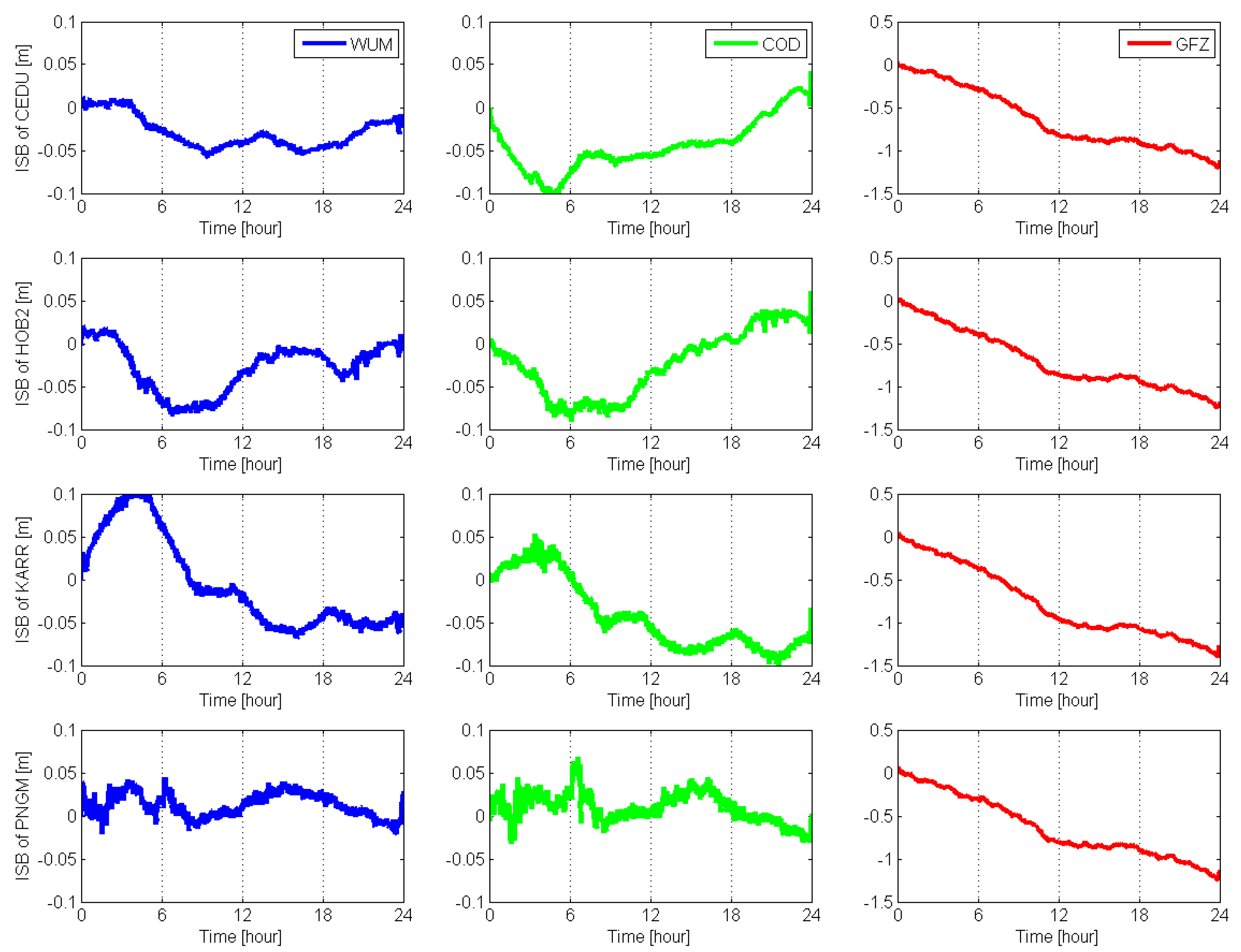
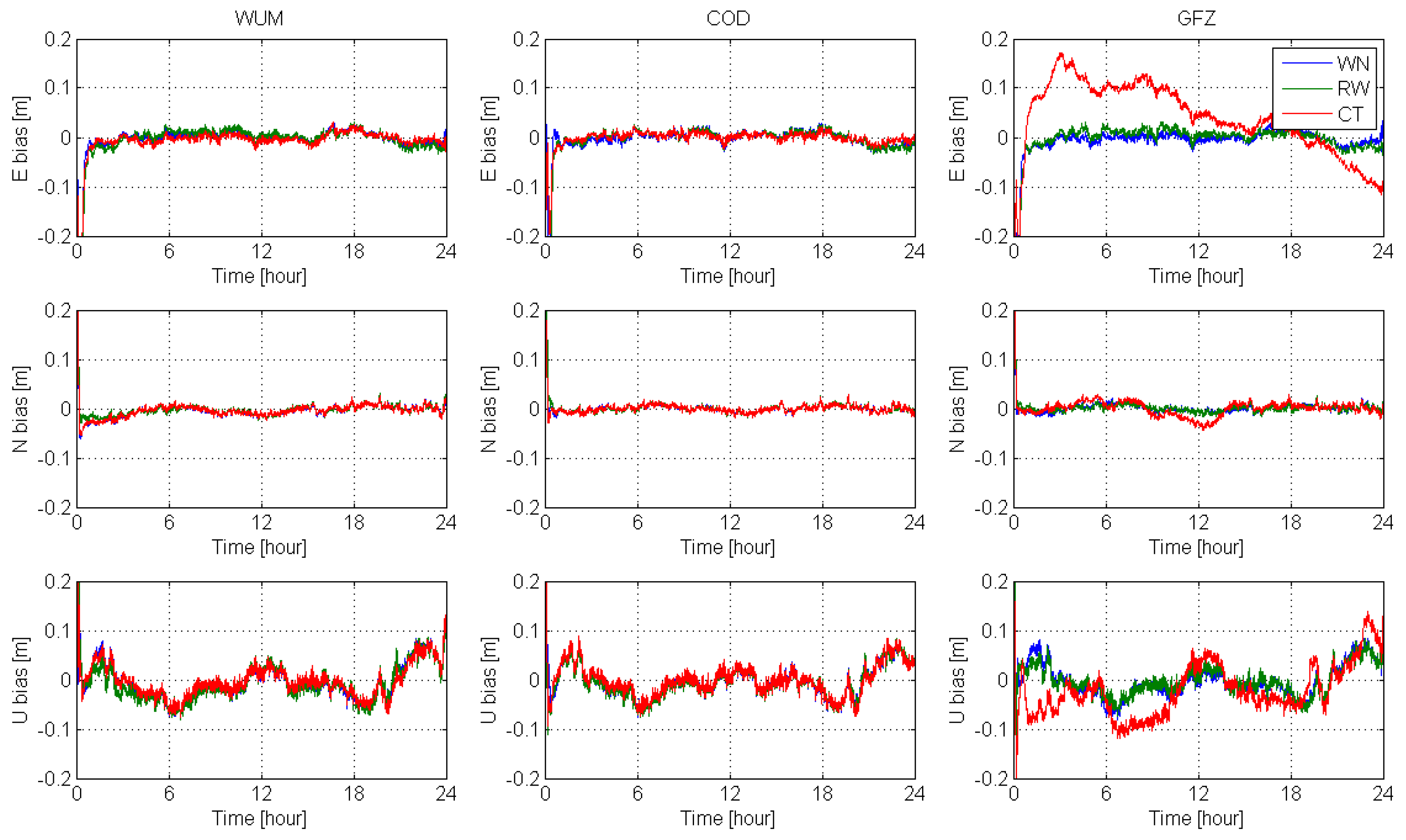
4.2. ISB Characterization Affected by the Ambient Environment
4.3. Discussion
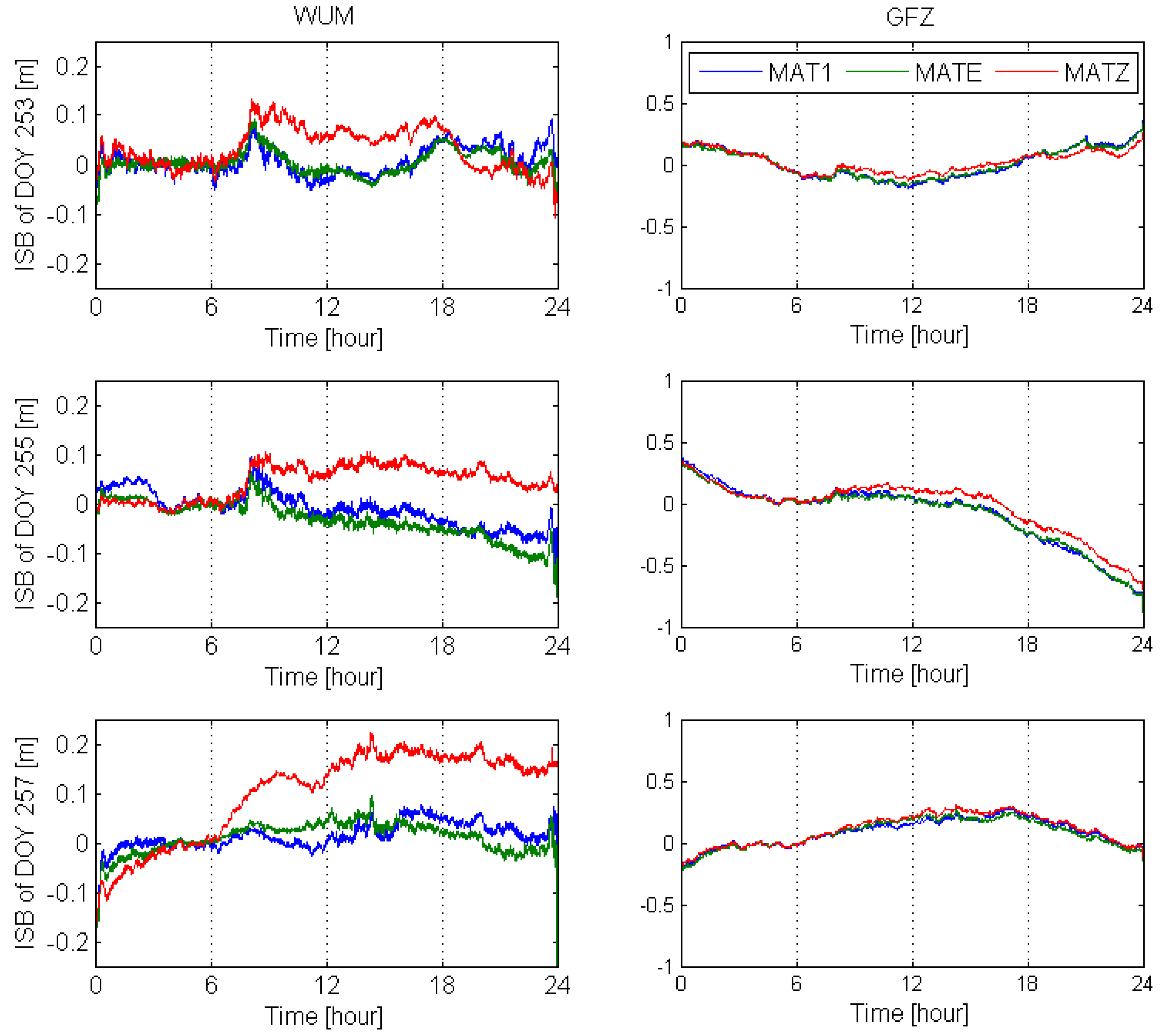
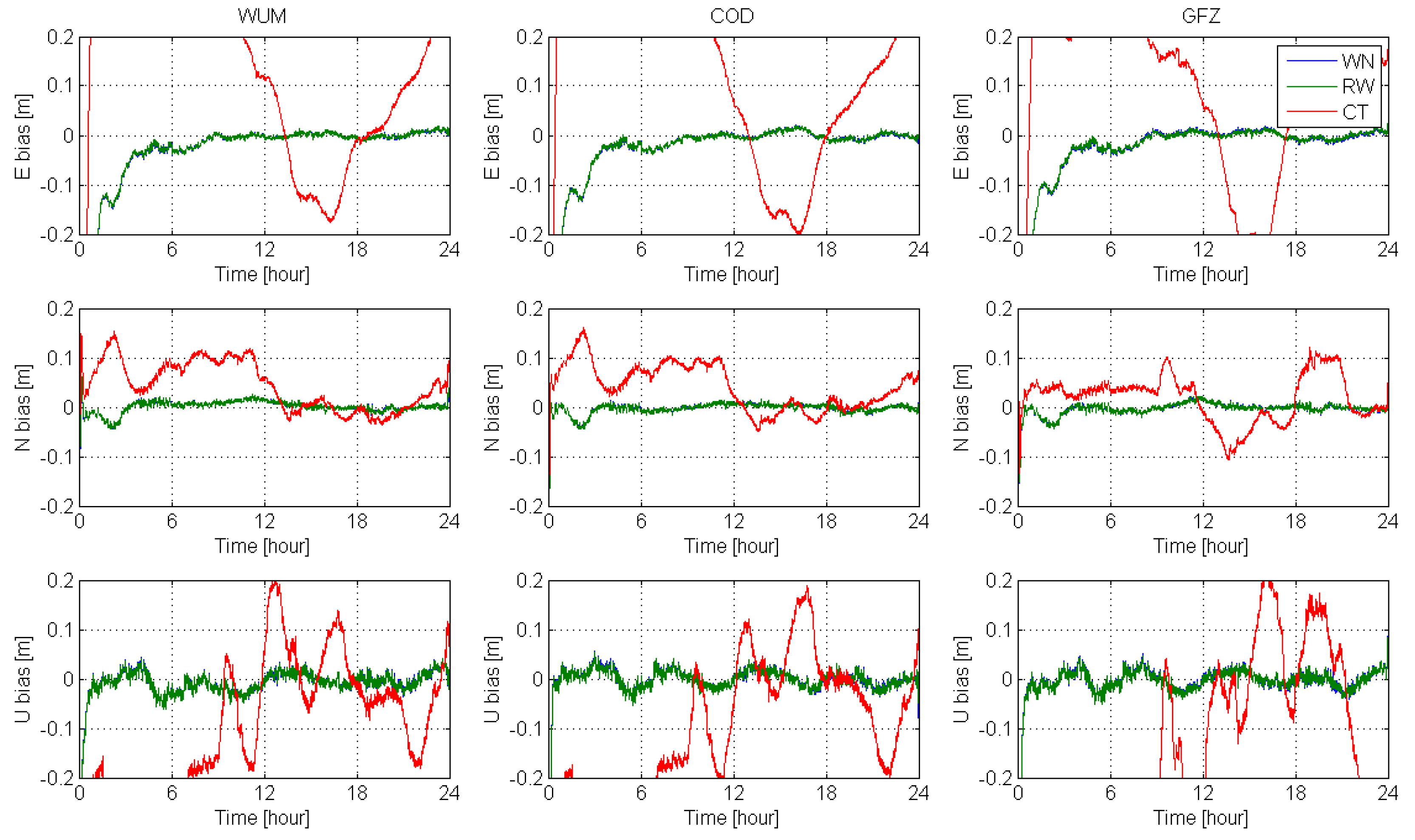
4.4. ISB Characterization Affected by the Receiver Type
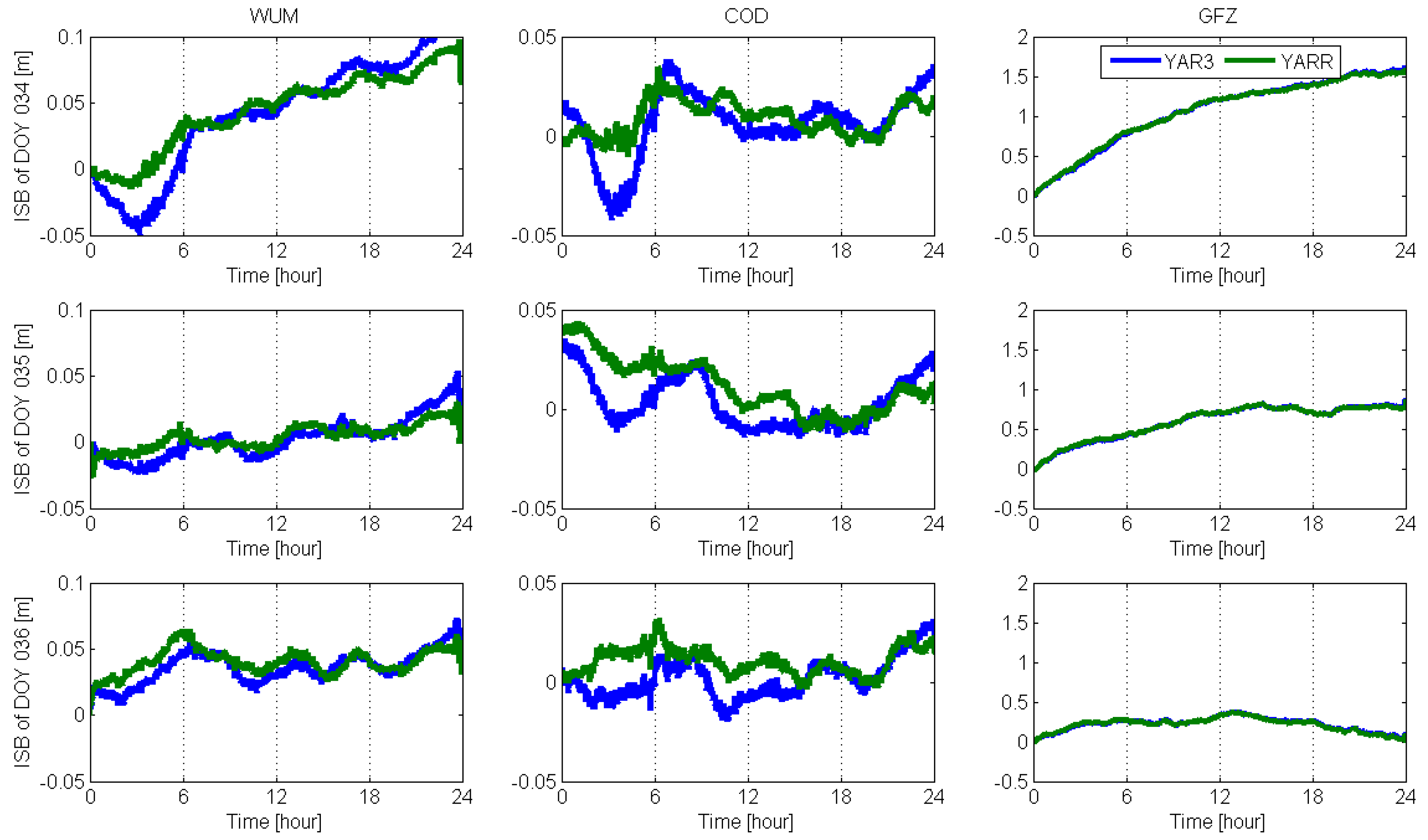
4.5. ISB Characterization Affected by the Antenna Type
5. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Defraigne, P.; Baire, Q. Combining GPS and GLONASS for time and frequency transfer. Adv. Space Res. 2011, 47, 265–275. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, H.; Ge, M.; Niu, X.; Shen, W.; Wickert, J.; Schuh, H. Tightly coupled integration of multi-GNSS PPP and MEMS inertial measurement unit data. GPS Solut. 2017, 21, 377–391. [Google Scholar] [CrossRef]
- Li, W.; Wang, G.; Mi, J.; Zhang, S. Calibration errors in determining slant Total Electron Content (TEC) from multi-GNSS data. Adv. Space Res. 2019, 63, 1670–1680. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, N.; Li, Z.; Huo, X. The BeiDou global broadcast ionospheric delay correction model (BDGIM) and its preliminary performance evaluation results. Annu. Navig. 2019, 66, 55–69. [Google Scholar] [CrossRef]
- Zhang, B.; Chen, Y.; Yuan, Y. PPP-RTK based on undifferenced and uncombined observations: Theoretical and practical aspects. J. Geod. 2019, 93, 1011–1024. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.J.G.; Odijk, D. A novel un-differenced PPP-RTK concept. J. Navig. 2011, 64, S180–S191. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y.; Pan, L.; Zhu, J. Precise point positioning with quad-constellations: GPS, BeiDou, GLONASS and Galileo. Adv. Space Res. 2015, 56, 133–143. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Zhou, F.; Dong, D.; Li, P.; Li, X.; Schuh, H. Influence of stochastic modeling for inter-system biases on multi-GNSS undifferenced and uncombined precise point positioning. GPS Solut. 2019, 23, 59. [Google Scholar] [CrossRef]
- Zha, J.; Zhang, B.; Yuan, Y.; Zhang, X.; Li, M. Use of modified carrier-to-code leveling to analyze temperature dependence of multi-GNSS receiver DCB and to retrieve ionospheric TEC. GPS Solut. 2019, 23, 103. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P.J. Characterization of between-receiver GPS-Galileo inter-system biases and their effect on mixed ambiguity resolution. GPS Solut. 2013, 17, 521–533. [Google Scholar] [CrossRef]
- Dalla Torre, A.; Caporali, A. An analysis of intersystem biases for multi-GNSS positioning. GPS Solut. 2015, 19, 297–307. [Google Scholar] [CrossRef]
- Chen, J.; Xiao, P.; Zhang, Y.; Wu, B. GPS/GLONASS system bias estimation and application in GPS/GLONASS combined positioning. In Proceedings of the China satellite Navigation Conference (CSNC) 2013, Wuhan, China, 15–17 May 2013; pp. 323–333. [Google Scholar]
- Zeng, A.; Yang, Y.; Ming, F.; Jing, Y. BDS–GPS inter-system bias of code observation and its preliminary analysis. GPS Solut. 2017, 21, 1573–1581. [Google Scholar] [CrossRef]
- Guo, J.; Li, X.; Li, Z.; Hu, L.; Yang, G.; Zhao, C.; Fairbairn, D.; Watson, D.; Ge, M. Multi-GNSS precise point positioning for precision agriculture. Precis. Agric. 2018, 19, 895–911. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Liu, T.; Yuan, Y.; Zhang, B.; Wang, N.; Tan, B.; Chen, Y. Multi-GNSS precise point positioning (MGPPP) using raw observations. J. Geod. 2017, 91, 253–268. [Google Scholar] [CrossRef]
- de Bakker, P.F.; Tiberius, C.C. Real-time multi-GNSS single-frequency precise point positioning. GPS Solut. 2017, 21, 1791–1803. [Google Scholar] [CrossRef]
- Jiang, N.; Xu, Y.; Xu, T.; Xu, G.; Sun, Z.; Schuh, H. GPS/BDS short-term ISB modelling and prediction. GPS Solut. 2017, 21, 163–175. [Google Scholar] [CrossRef]
- Hong, J.; Tu, R.; Gao, Y.; Zhang, R.; Fan, L.; Zhang, P.; Liu, J. Characteristics of inter-system biases in Multi-GNSS with precise point positioning. Adv. Space Res. 2019, 63, 3777–3794. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, W.; Chen, H.; Zhao, W.; Huo, L.; Huang, L.; Chen, Q. An analysis of inter-system biases in BDS/GPS precise point positioning. GPS Solut. 2019, 23, 116. [Google Scholar] [CrossRef]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Kouba, J. A Guide to Using International GNSS Service (IGS) Products; Kouba, Jan: Pasadena, CA, USA, 2009. [Google Scholar]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Odijk, D.; Zhang, B.; Khodabandeh, A.; Odolinski, R.; Teunissen, P.J.G. On the estimability of parameters in undifferenced, uncombined GNSS network and PPP-RTK user models by means of \mathcal {S}-system theory. J. Geod. 2016, 90, 15–44. [Google Scholar] [CrossRef]
- Han, S.; Kwon, J.H.; Jekeli, C. Accurate absolute GPS positioning through satellite clock error estimation. J. Geod. 2001, 75, 33–43. [Google Scholar] [CrossRef]
- Blewitt, G. An automatic editing algorithm for GPS data. Geophys. Res. Lett. 1990, 17, 199–202. [Google Scholar] [CrossRef]
- Wang, J.; Stewart, M.; Tsakiri, M. Adaptive Kalman filtering for integration of GPS with GLONASS and INS. In Geodesy beyond 2000; Presentation at the XXIIth International Union for Geodesy and Geophysics (IUGG); Springer: Berlin/Heidelberg, Germany, 2000; pp. 325–330. [Google Scholar]
- Hou, P.; Zhang, B.; Yuan, Y. Analysis of the stochastic characteristics of GPS/BDS/Galileo multi-frequency observables with different types of receivers. J. Spat. Sci. 2019, 1–25. [Google Scholar] [CrossRef]
- Pan, L.; Xiaohong, Z.; Fei, G. Ambiguity resolved precise point positioning with GPS and BeiDou. J. Geod. 2017, 91, 25–40. [Google Scholar] [CrossRef]
- Zhang, H.; Hao, J.; Liu, W.; Yu, H.; Tian, Y. A Kalman filter method for BDS/GPS short-term ISB modelling and prediction. Acta Geod. Cartogr. Sin 2016, 45, 31–38. [Google Scholar]
- Tegedor, J.; Øvstedal, O.; Vigen, E. Precise orbit determination and point positioning using GPS, Glonass, Galileo and BeiDou. J. Geod. Sci. 2014, 4, 65–73. [Google Scholar] [CrossRef]
- Grewal, M.S.; Andrews, A.P. Kalman Filtering: Theory and Practice with MATLAB; John Wiley & Sons: New York, NY, USA, 2014. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Options | Processing Strategies |
|---|---|
| System | GPS/BDS |
| Observation interval | 30 s |
| Estimation principal | Kalman filter |
| Frequency | L1,L2/B1,B2 |
| Elevation cutoff angle | 7° |
| Receiver clock | White noise |
| Inter-system bias (ISB) | White noise |
| Ionospheric delay | White noise |
| Tropospheric delay | Random walk |
| Receiver coordinates | Static |
| Ambiguities | Constant over time |
| Station | Receiver type | Antenna type |
|---|---|---|
| CEDU | SEPT POLARX5 | AOAD/M_T |
| HOB2 | SEPT POLARX5 | AOAD/M_T |
| KARR | TRIMBLE NETR9 | TRM59800.00 |
| PNGM | TRIMBLE NETR9 | TRM59800.00 |
| Station | Receiver Type | Antenna Type |
|---|---|---|
| MAT1 | LEICA GR30 | LEIAR20 |
| MATE | LEICA GR30 | LEIAR20 |
| MATZ | SEPT POLARX5TR | LEIAR20 |
| Station | Receiver Type | Antenna Type |
|---|---|---|
| YARR | SEPT POLARX5 | LEIAT504 |
| YAR3 | SEPT POLARX5 | LEIAR25 |
| Constant | Random Walk | White Noise | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Horizontal | Vertical | 3D | Horizontal | Vertical | 3D | Horizontal | Vertical | 3D | |
| WUM | 2.25 | 3.90 | 4.50 | 2.52 | 4.06 | 4.48 | 2.70 | 4.24 | 5.03 |
| COD | 2.02 | 3.68 | 4.20 | 2.29 | 3.84 | 4.45 | 2.46 | 3.91 | 4.62 |
| GFZ | 8.66 | 9.71 | 13.2 | 2.34 | 3.82 | 4.48 | 2.36 | 3.87 | 4.53 |
| Constant | Random Walk | White Noise | ||||
|---|---|---|---|---|---|---|
| Horizontal | Vertical | Horizontal | Vertical | Horizontal | Vertical | |
| WUM | 39.4 | 26.5 | 42.1 | 27.7 | 45.2 | 30.0 |
| COD | 37.5 | 25.3 | 40.4 | 25.9 | 44.7 | 29.2 |
| GFZ | 157.3 | 31.1 | 47.7 | 26.6 | 46.9 | 29.8 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ke, C.; Zheng, Y.; Wang, S. Characterization of Inter-System Biases in GPS + BDS Precise Point Positioning. Appl. Sci. 2020, 10, 4968. https://doi.org/10.3390/app10144968
Ke C, Zheng Y, Wang S. Characterization of Inter-System Biases in GPS + BDS Precise Point Positioning. Applied Sciences. 2020; 10(14):4968. https://doi.org/10.3390/app10144968
Chicago/Turabian StyleKe, Cheng, Yanning Zheng, and Shengli Wang. 2020. "Characterization of Inter-System Biases in GPS + BDS Precise Point Positioning" Applied Sciences 10, no. 14: 4968. https://doi.org/10.3390/app10144968
APA StyleKe, C., Zheng, Y., & Wang, S. (2020). Characterization of Inter-System Biases in GPS + BDS Precise Point Positioning. Applied Sciences, 10(14), 4968. https://doi.org/10.3390/app10144968