NICE: Superpixel Segmentation Using Non-Iterative Clustering with Efficiency


Abstract
1. Introduction
2. Simple Non-Iterative Clustering
- An input 3-channel Lab image is uniformly partitioned by a set of evenly distributed seeds , where represents the pixel in the image plane with elements, means centroid of mass in grids with a step of and is user-specified to expect the number of superpixels;
- For a pixel in the image plane, it can be represented as a 5-dimensional Euclidean feature vector . Specifically, is composed of a vector of the 3-channel Lab digital values and image position coordinates ;
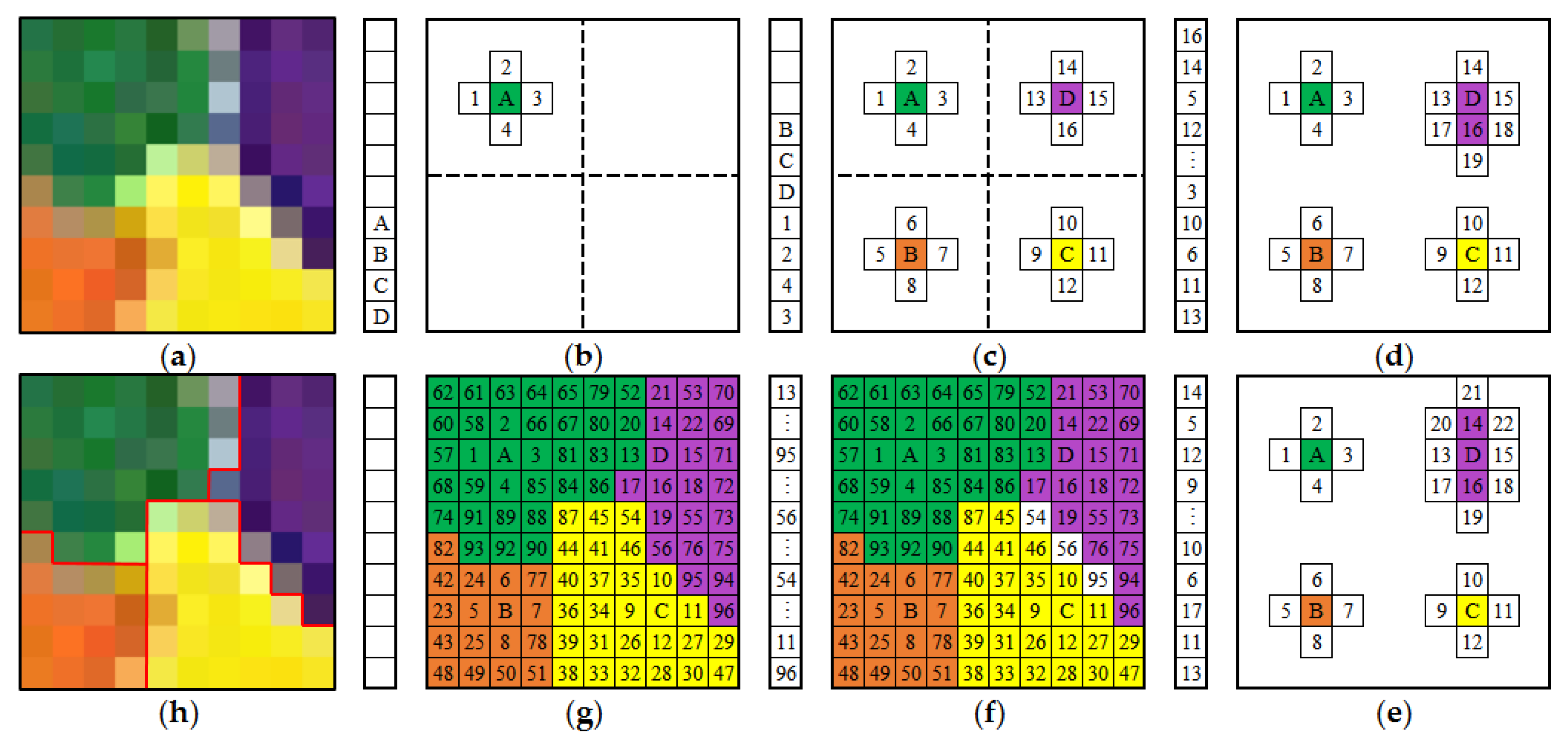
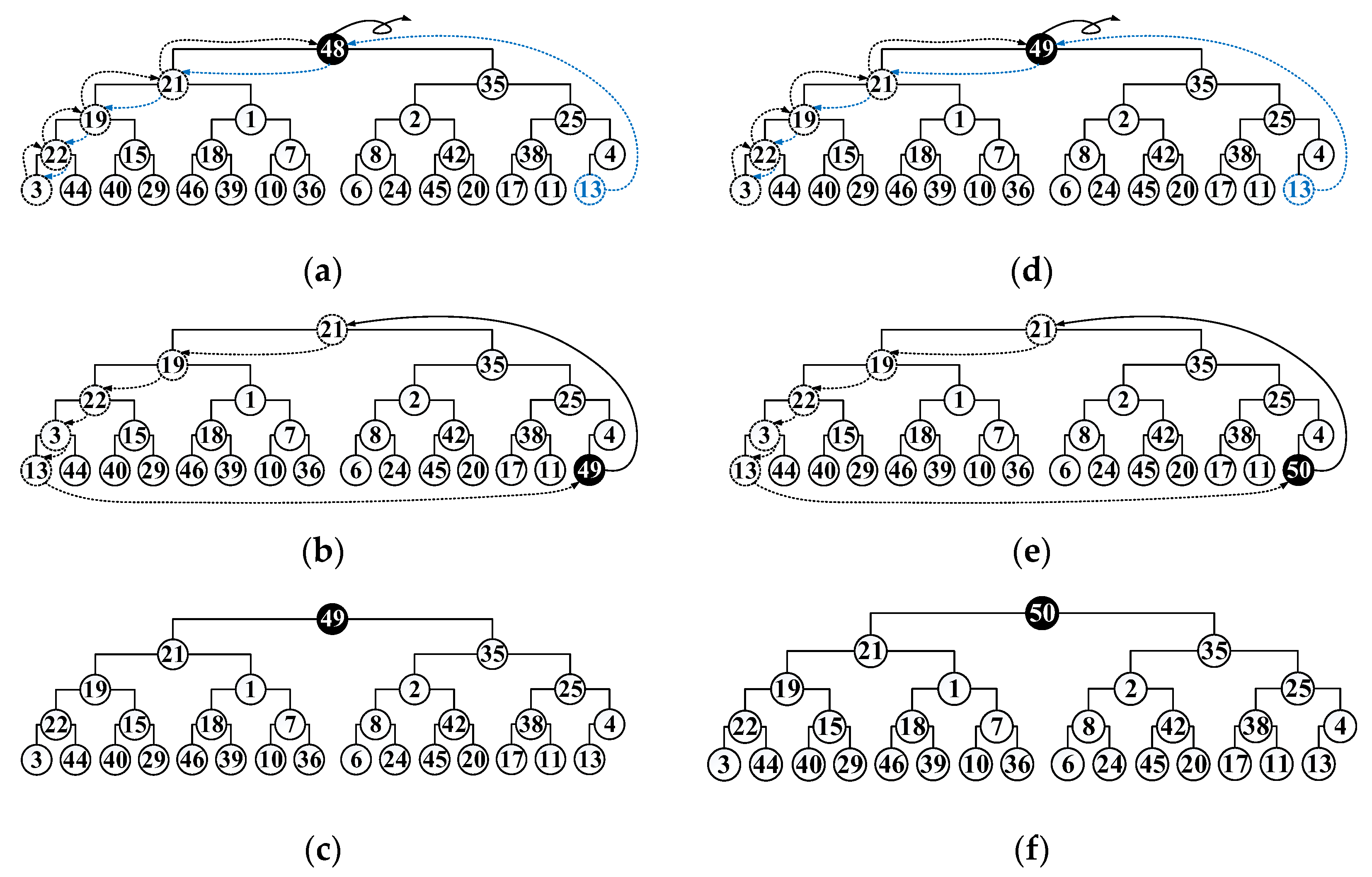
- In the initialization step each element of with unique labels are initialized on the uniform grid in the image plane as original cluster centers. A priority queue with increasing order is introduced which always returns the element with the minimum key value while it is not empty. For each element , is adopted to represent the distance to corresponding cluster center, and then recorded as the key value for sorting in . Specially, for each seed , all information is included in a vector node with . Then all seed vectors are pushed on .
- In the joint assignment and updating step, is updated using online averaging of all clusters. For an unlabeled neighboring pixel , inspected by the currently popped pixel whose cluster centered at , the distance is calculated by Equation (1) where it is identical to . Then is pushed on .where is the quotient of maximal and within this cluster to normalize color and spatial proximity, and represents the Euclidean metric;
- Followed by all neighboring pixels pushed around the frontier pixel, secondly, is acquired by popping the top-most element from , which corresponds to a pixel containing the global minimum distance in Equation (2)that is, . Then a new label is assigned to in accordance with its nearest cluster center, and turns into the frontier of its cluster. Meanwhile, the feature vector of the cluster centroid is updated bywhere means the cluster which is centered at , and means the number of pixels in .
- The latter two procedures are repeated till is empty.
3. Non-Iterative Clustering with Efficiency
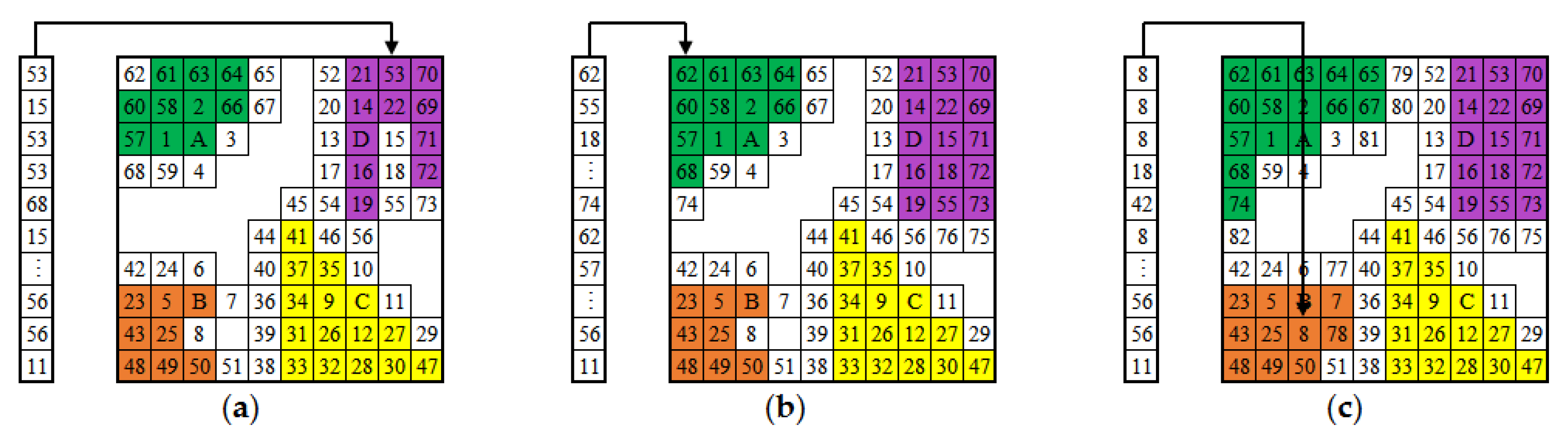
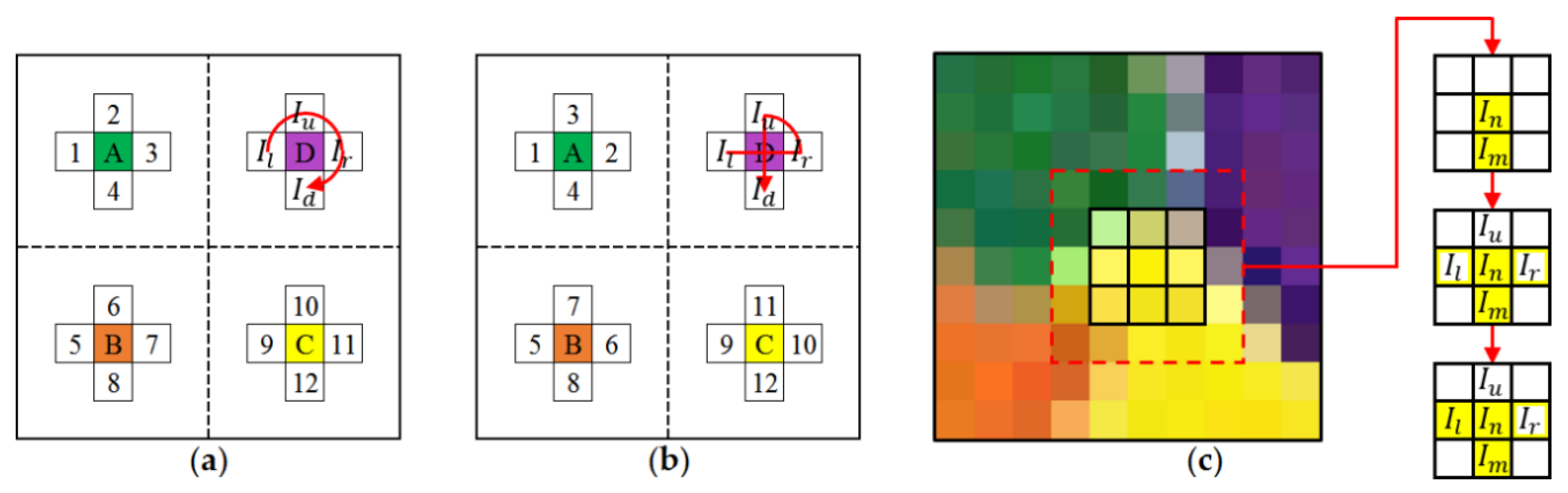
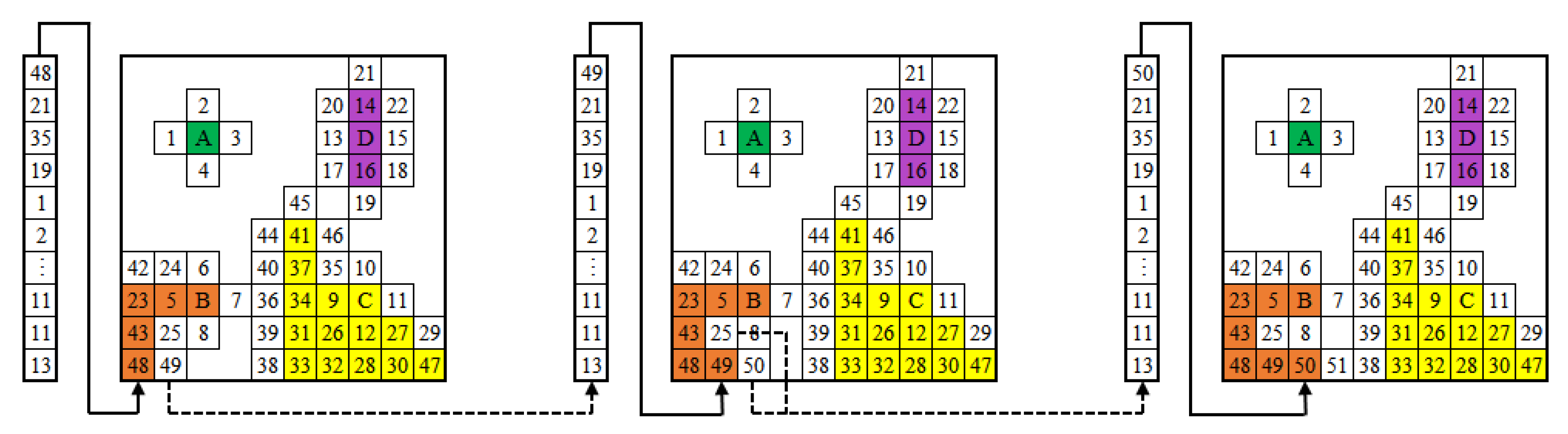
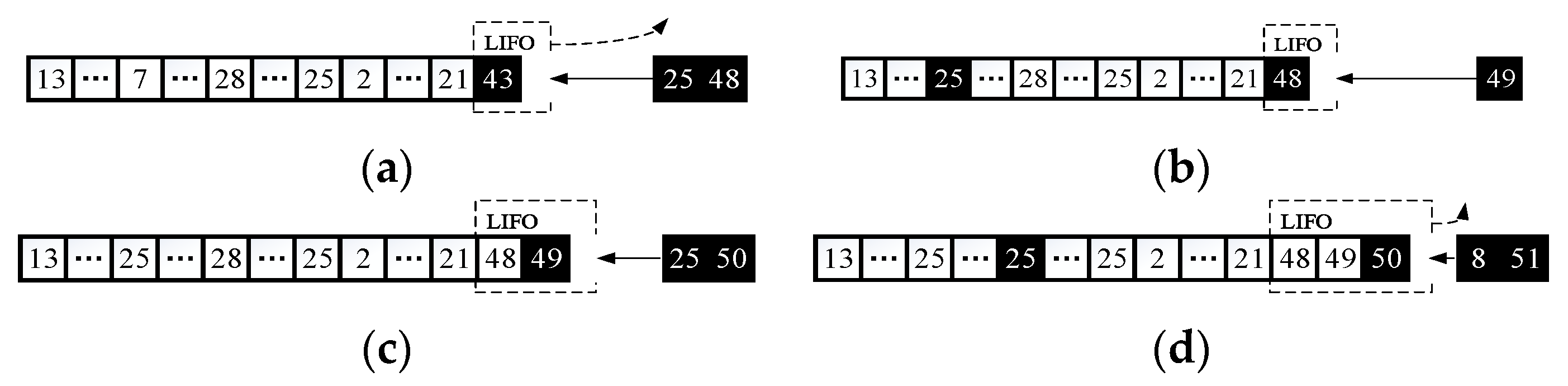
3.1. Elimination of Inspection Redundancy
3.2. Accelerated Implementation Based on Recursion
3.3. NICE Superpixel Segmentation Framework
| Algorithm 1 NICE superpixel segmentation framework |
| Input: the Lab image , the expected number , the default normalization factor |
| Output: the label map of I /* Initialization */ initialize cluster centers and assign starting labels similar to conventional SNIC. initialize a priority queue with increasing order, and a LIFO stack . /* Joint assignment and updating */ for each cluster center do create a vector node . push the node on . end for while is not empty do while is not empty do pop the top-most node corresponding to from . goto AIR end while pop the top-most node corresponding to from . AIR: |
 end if end while return the label map of I |
4. Experiments and Analysis
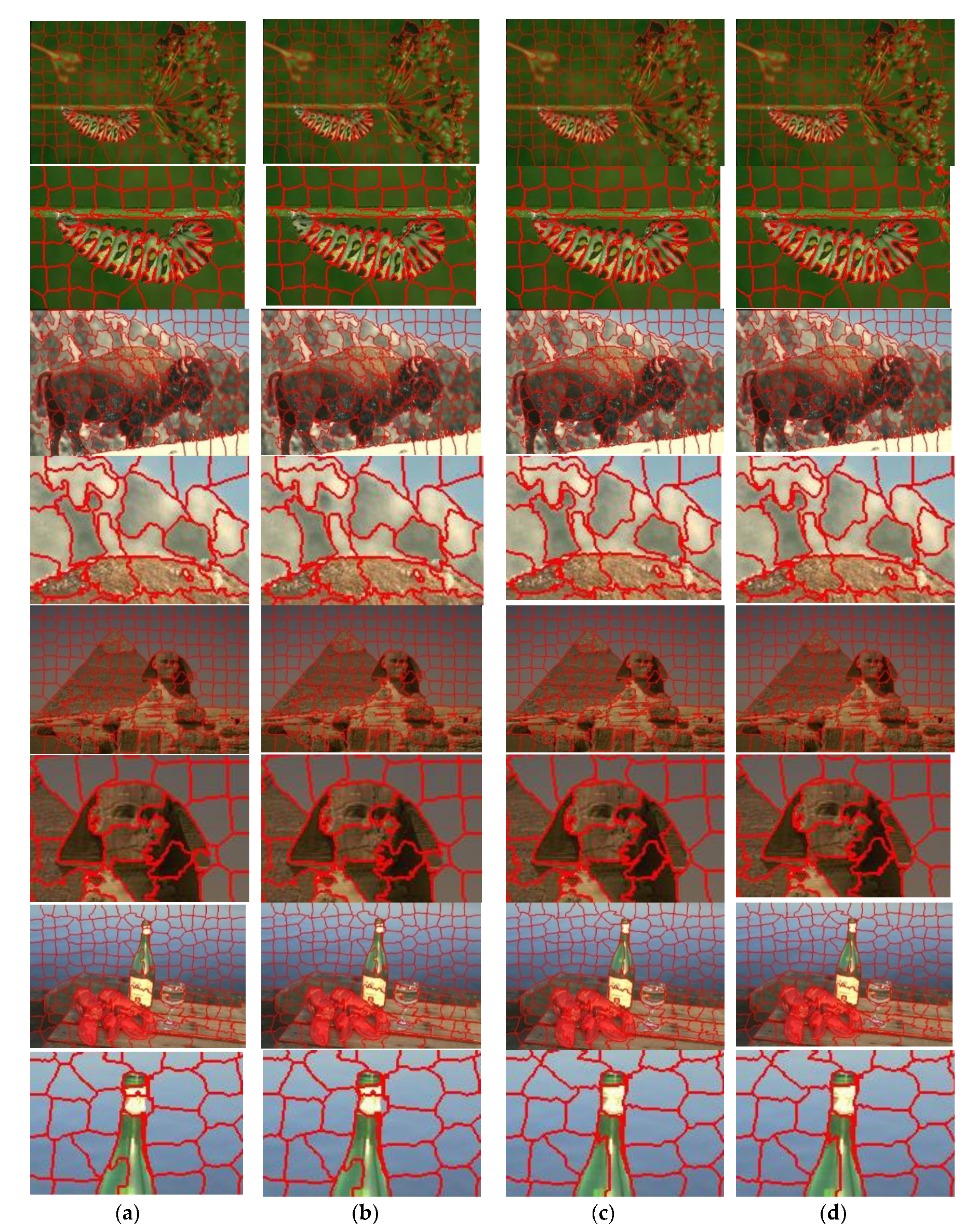
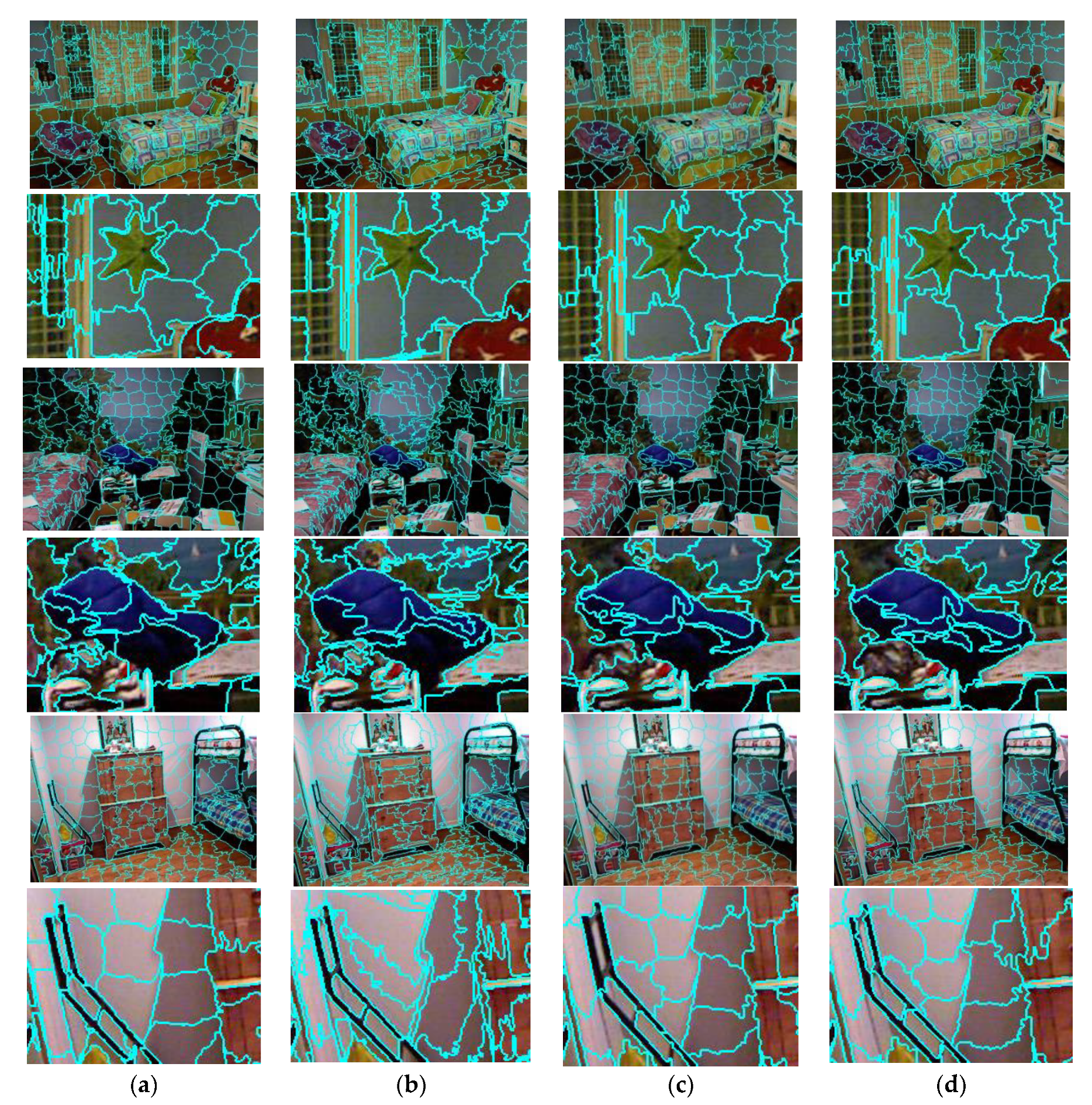
4.1. Visual Comparisons of Superpixel Results
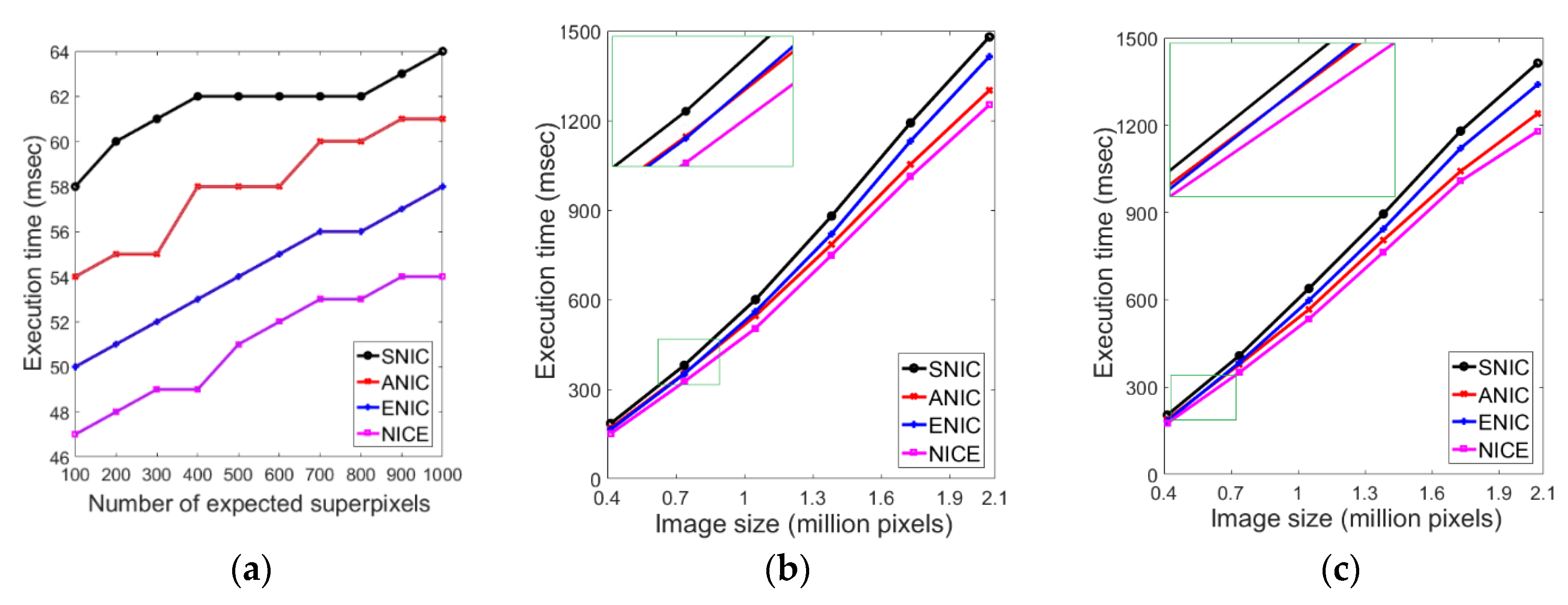
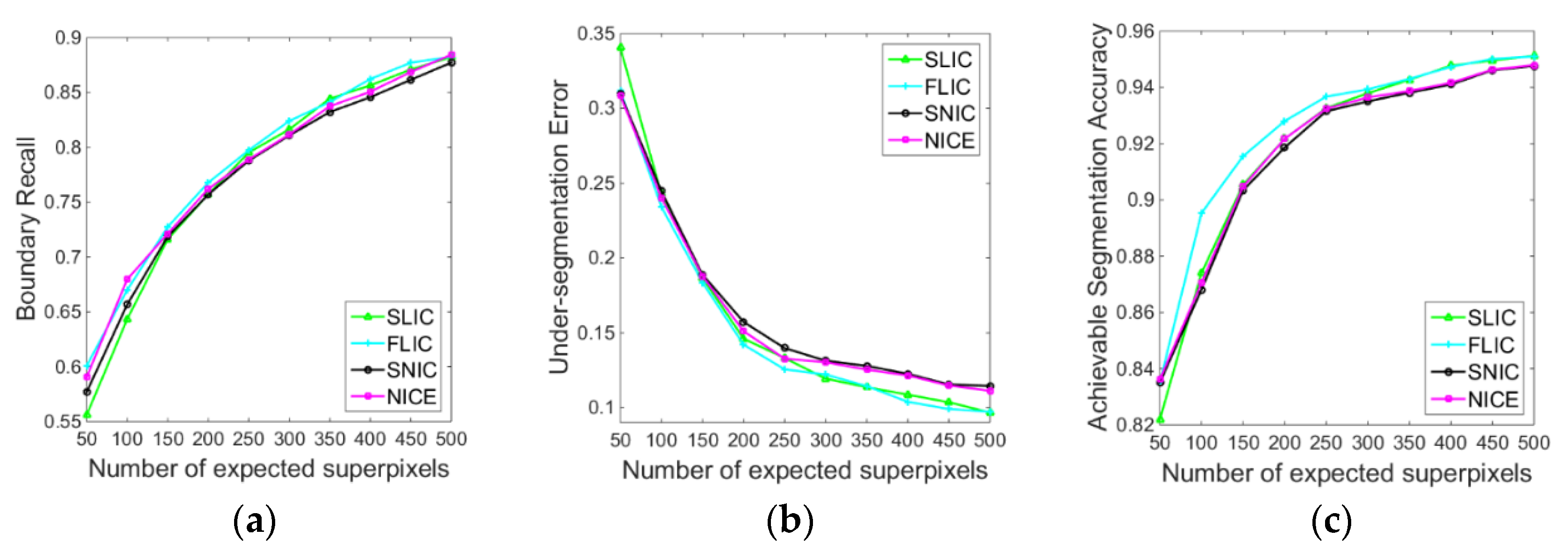
4.2. Quantitative Evaluation by Metrics
4.3. More Discussions on the Performance
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xu, L.; Luo, B.; Pei, Z.; Qin, K. PFS: Particle-filter-based superpixel segmentation. Symmetry 2018, 10, 143. [Google Scholar] [CrossRef]
- Boemer, F.; Ratner, E.; Lendasse, A. Parameter-free image segmentation with SLIC. Neurocomputing 2018, 277, 228–236. [Google Scholar] [CrossRef]
- Yeo, D.; Son, J.; Han, B.; Han, J. Superpixel-based tracking-by-segmentation using Markov chains. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 511–520. [Google Scholar]
- Liu, Z.; Zou, W.; Meur, O. Saliency tree: A novel saliency detection framework. IEEE Trans. Image Process. (TIP) 2014, 23, 1937–1952. [Google Scholar]
- Zou, H.; Qin, X.; Zhou, S.; Ji, K. A likelihood-based SLIC superpixel algorithm for SAR images using generalized gamma distribution. Sensors 2016, 16, 1107. [Google Scholar] [CrossRef] [PubMed]
- Baatz, M.; Schäpe, A. Multiresolution segmentation: An optimization approach for high quality multi-scale image segmentation. In Proceedings of the Symposium for Applied Geographic Information Processing, Karlsruhe, Germany, 5–7 July 2000; pp. 12–23. [Google Scholar]
- Stutz, D.; Hermans, A.; Leibe, B. Superpixels: An evaluation of the state-of-the-art. Comput. Vis. Image Underst. 2018, 166, 1–27. [Google Scholar] [CrossRef]
- Achanta, R.; Susstrunk, S. Superpixels and polygons using simple non-iterative clustering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4895–4904. [Google Scholar]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Susstrunk, S. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef]
- He, W.; Li, C.; Guo, Y.; Wei, Z.; Guo, B. A two-stage gradient ascent-based superpixel framework for adaptive segmentation. Appl. Sci. 2019, 9, 2421. [Google Scholar] [CrossRef]
- Jampani, V.; Sun, D.; Liu, M.; Yang, M.; Kautz, J. Superpixel sampling networks. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 363–380. [Google Scholar]
- Chen, J.; Li, Z.; Huang, B. Linear spectral clustering superpixel. IEEE Trans. Image Process. 2017, 26, 3317–3330. [Google Scholar] [CrossRef]
- Giraud, R.; Ta, V.; Papadakis, N. Robust superpixels using color and contour features along linear path. Comput. Vis. Image Underst. 2018, 170, 1–13. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, C.; Yu, M.; He, Y. Manifold SLIC: A fast method to compute content-sensitive superpixels. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 651–659. [Google Scholar]
- Zhao, J.; Hou, Q.; Ren, B.; Cheng, M.; Rosin, P. FLIC: Fast linear iterative clustering with active search. In Proceedings of the AAAI Conference on Artificial Intelligence (AAAI), New Orleans, LA, USA, 2–7 February 2018; pp. 7574–7581. [Google Scholar]
- Liu, Y.; Yu, M.; Li, B.; He, Y. Intrinsic manifold SLIC: A simple and efficient method for computing content-sensitive superpixels. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 653–666. [Google Scholar] [CrossRef]
- Du, Q.; Faber, V.; Gunzburger, M. Centroidal Voronoi tessellations: Applications and algorithms. SIAM Rev. 1999, 41, 637–676. [Google Scholar] [CrossRef]
- Wu, C.; Zhang, L.; Zhang, H.; Yan, H. Superpixels using fuzzy simple linear iterative clustering and fast precise number control. arXiv 2018, arXiv:1812.10932. [Google Scholar]
- Kang, X.; Zhu, L.; Ming, A. Dynamic random walk for superpixel segmentation. IEEE Trans. Image Proce 2020, 29, 3871–3884. [Google Scholar] [CrossRef] [PubMed]
- Choi, K.; Oh, K. Subsampling-based acceleration of simple linear iterative clustering for superpixel segmentation. Comput. Vis. Image Underst. 2016, 146, 1–8. [Google Scholar] [CrossRef]
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour detection and hierarchical image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 898–916. [Google Scholar] [CrossRef]
- Wang, M.; Liu, X.; Gao, Y.; Ma, X.; Soomro, N. Superpixel segmentation: A benchmark. Signal Process. Image Commun. 2017, 56, 28–39. [Google Scholar] [CrossRef]
- Silberman, N.; Hoiem, D.; Kohli, P.; Fergus, R. Indoor segmentation and support inference from RGBD images. In Proceedings of the European Conference on Computer Vision (ECCV), Florence, Italy, 7–13 October 2012; pp. 746–760. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | User-Expected Number of Superpixels | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | |
| SNIC | 0.6740 | 0.7921 | 0.8428 | 0.8668 | 0.8985 | 0.9059 | 0.9195 | 0.9311 | 0.9387 | 0.9493 |
| ANIC | 0.6740 | 0.7922 | 0.8428 | 0.8669 | 0.8985 | 0.9060 | 0.9195 | 0.9311 | 0.9386 | 0.9493 |
| ENIC | 0.6757 | 0.7957 | 0.8457 | 0.8694 | 0.9010 | 0.9085 | 0.9213 | 0.9334 | 0.9405 | 0.9506 |
| NICE | 0.6757 | 0.7957 | 0.8457 | 0.8694 | 0.9010 | 0.9084 | 0.9212 | 0.9334 | 0.9405 | 0.9506 |
| Algorithm | User-Expected Number of Superpixels | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | |
| SNIC | 0.1753 | 0.1100 | 0.0898 | 0.0809 | 0.0706 | 0.0680 | 0.0645 | 0.0603 | 0.0578 | 0.0545 |
| ANIC | 0.1751 | 0.1100 | 0.0897 | 0.0809 | 0.0706 | 0.0680 | 0.0645 | 0.0603 | 0.0578 | 0.0546 |
| ENIC | 0.1751 | 0.1089 | 0.0894 | 0.0806 | 0.0702 | 0.0675 | 0.0643 | 0.0603 | 0.0574 | 0.0544 |
| NICE | 0.1751 | 0.1088 | 0.0894 | 0.0807 | 0.0702 | 0.0675 | 0.0643 | 0.0603 | 0.0574 | 0.0544 |
| Algorithm | User-Expected Number of Superpixels | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | |
| SNIC | 0.8379 | 0.8962 | 0.9142 | 0.9222 | 0.9318 | 0.9344 | 0.9379 | 0.9413 | 0.9436 | 0.9464 |
| ANIC | 0.8379 | 0.8962 | 0.9142 | 0.9222 | 0.9318 | 0.9344 | 0.9379 | 0.9413 | 0.9436 | 0.9464 |
| ENIC | 0.8383 | 0.8966 | 0.9145 | 0.9225 | 0.9322 | 0.9347 | 0.9380 | 0.9416 | 0.9439 | 0.9465 |
| NICE | 0.8383 | 0.8967 | 0.9145 | 0.9225 | 0.9322 | 0.9347 | 0.9380 | 0.9416 | 0.9439 | 0.9465 |
| Metrics | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0.01 | 0.02 | 0.03 | 0.04 | 0.05 | 0.06 | 0.07 | 0.08 | 0.09 | 0.10 | |
| BR | +0.0037 | +0.0032 | +0.0026 | +0.0021 | +0.0015 | +0.0011 | +0.0005 | +0.0002 | −0.0003 | −0.0006 |
| UE | −0.0003 | −0.0003 | -0.0003 | −0.0002 | −0.0001 | −0.0001 | 0 | 0 | 0 | +0.0001 |
| ASA | +0.0003 | +0.0003 | +0.0003 | +0.0002 | +0.0001 | +0.0002 | +0.0001 | +0.0001 | +0.0002 | +0.0002 |
| ET (msec) | −7 | −8 | −9 | −10 | −11 | −11 | −12 | −12 | −13 | −13 |
| EIR ratio | +40.1% | +45.3% | +48.5% | +51.1% | +52.9% | +54.4% | +55.7% | +56.7% | +57.6% | +58.5% |
| Algorithm | User-Expected Number of Superpixels | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | |
| SLIC | 123 | 124 | 124 | 124 | 126 | 126 | 128 | 129 | 130 | 130 |
| FLIC | 75 | 77 | 77 | 79 | 79 | 80 | 80 | 82 | 83 | 84 |
| SNIC | 69 | 71 | 73 | 75 | 76 | 76 | 77 | 80 | 80 | 81 |
| NICE | 62 | 63 | 64 | 65 | 66 | 66 | 67 | 68 | 69 | 70 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Guo, B.; Wang, G.; Zheng, Y.; Liu, Y.; He, W. NICE: Superpixel Segmentation Using Non-Iterative Clustering with Efficiency. Appl. Sci. 2020, 10, 4415. https://doi.org/10.3390/app10124415
Li C, Guo B, Wang G, Zheng Y, Liu Y, He W. NICE: Superpixel Segmentation Using Non-Iterative Clustering with Efficiency. Applied Sciences. 2020; 10(12):4415. https://doi.org/10.3390/app10124415
Chicago/Turabian StyleLi, Cheng, Baolong Guo, Geng Wang, Yan Zheng, Yang Liu, and Wangpeng He. 2020. "NICE: Superpixel Segmentation Using Non-Iterative Clustering with Efficiency" Applied Sciences 10, no. 12: 4415. https://doi.org/10.3390/app10124415
APA StyleLi, C., Guo, B., Wang, G., Zheng, Y., Liu, Y., & He, W. (2020). NICE: Superpixel Segmentation Using Non-Iterative Clustering with Efficiency. Applied Sciences, 10(12), 4415. https://doi.org/10.3390/app10124415