Drone-Based Parcel Delivery Using the Rooftops of City Buildings: Model and Solution


Abstract
1. Introduction
2. Related Works
2.1. Urban Logistics
2.2. Drone-Based Parcel Delivery
- The optimal operation planning of a drone-based parcel delivery using the rooftops of city buildings is suggested.
- A heuristic to quickly and effectively generate solutions (i.e., delivery schedules) is proposed, even for large problems that can commonly occur in dense urban areas.
- Our proposed optimization model and heuristic are validated by conducting experiments with realistic settings.
3. Model Development
3.1. Parcel Delivery Issues in Cities
3.2. Assumptions and Problem Description
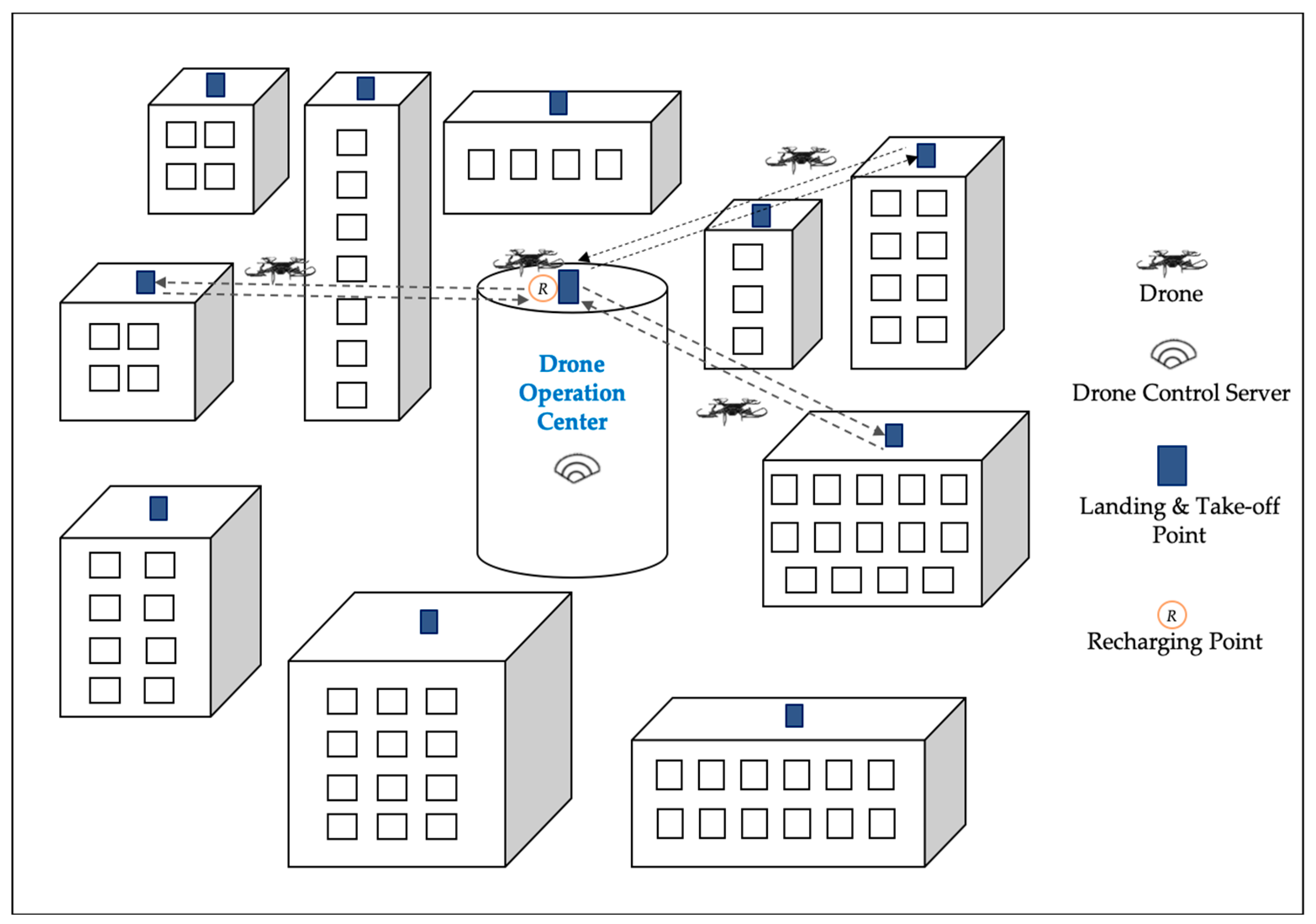
- There are several buildings, each of which has a rooftop with sufficient space.
- One of the rooftops of any building or the rooftop of a delivery center (e.g., post office building) is designated a drone operation center.
- Drones are operated on a hub-and-spoke network, and each drone can carry at most one package due to their fixed payloads; thus, they can move between the drone operation center to one of the delivery locations only [24].
- Multiple drones are used, and the number of drones for parcel delivery is given.
- Drones are not used to replace conventional delivery modes but to supplement them.
- The demand is represented as the number of parcels, which is known and given for each building.
- The delivery location for each building is set to the center of the rooftop, and the delivery distance can be calculated by checking the straight-line distance between each destination and the drone operation center.
3.3. Mathematical Model
- drone index ().
- destination (rooftops) index ().
- drone operation index (). The upper bound of the drone operation index, , can be set by adding the estimated number of recharging operations and the estimated number of delivery operations. Of course, can be adjusted during the pre-experiments.
- demand at destination (unit: number of parcels).
- distance between the drone operation center and rooftop (unit: ).
- worst-case battery consumption (unit: ).
- battery capacity of the drone (unit: kWh).
- average speed of the drone (unit: km/h).
- required time to load, unload, take-off, and land the drone (unit: hour).
- daily available hours for drone operations (unit: hour).
- minimum recharging ratio to prevent full discharge. The battery capacity of the drone should not fall below this ratio.
- battery recharging time from the minimum charging ratio () to full charge (unit: hour).
- 1 if drone delivers a parcel to destination as the th operation, and0 otherwise.
- 1 if drone recharges its battery as the th operation, and0 otherwise.
- battery recharging ratio (%) when drone recharges its battery as the th operation. . If is 0.5, then the recharge amount of the battery capacity is 0.5.
- the battery charge after drone finishes its th operation. The initial battery charge is set to .
- time after drone finishes its th operation. The initial time is set to zero, and it increases as the operations are performed.
4. Heuristic-Based Solution
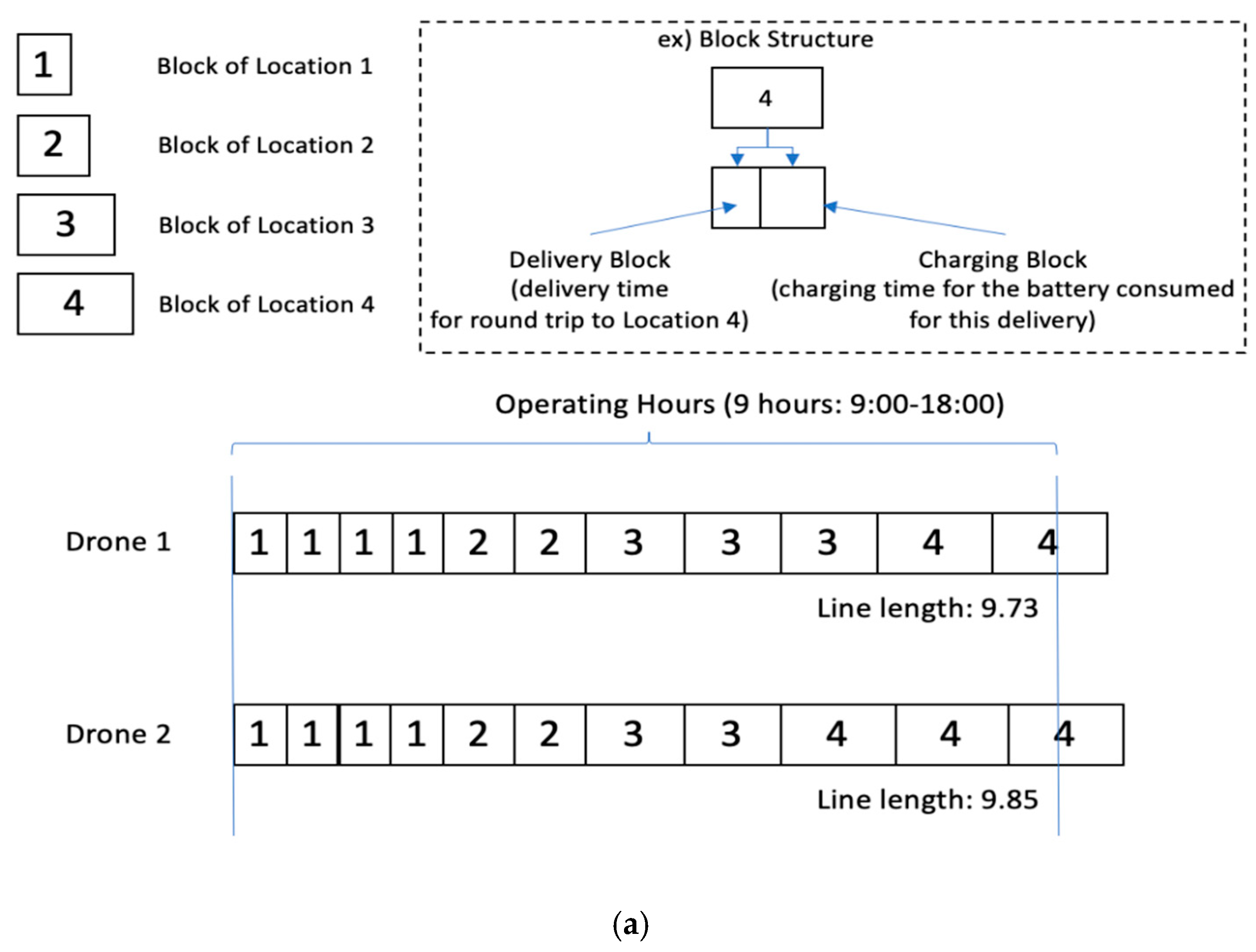
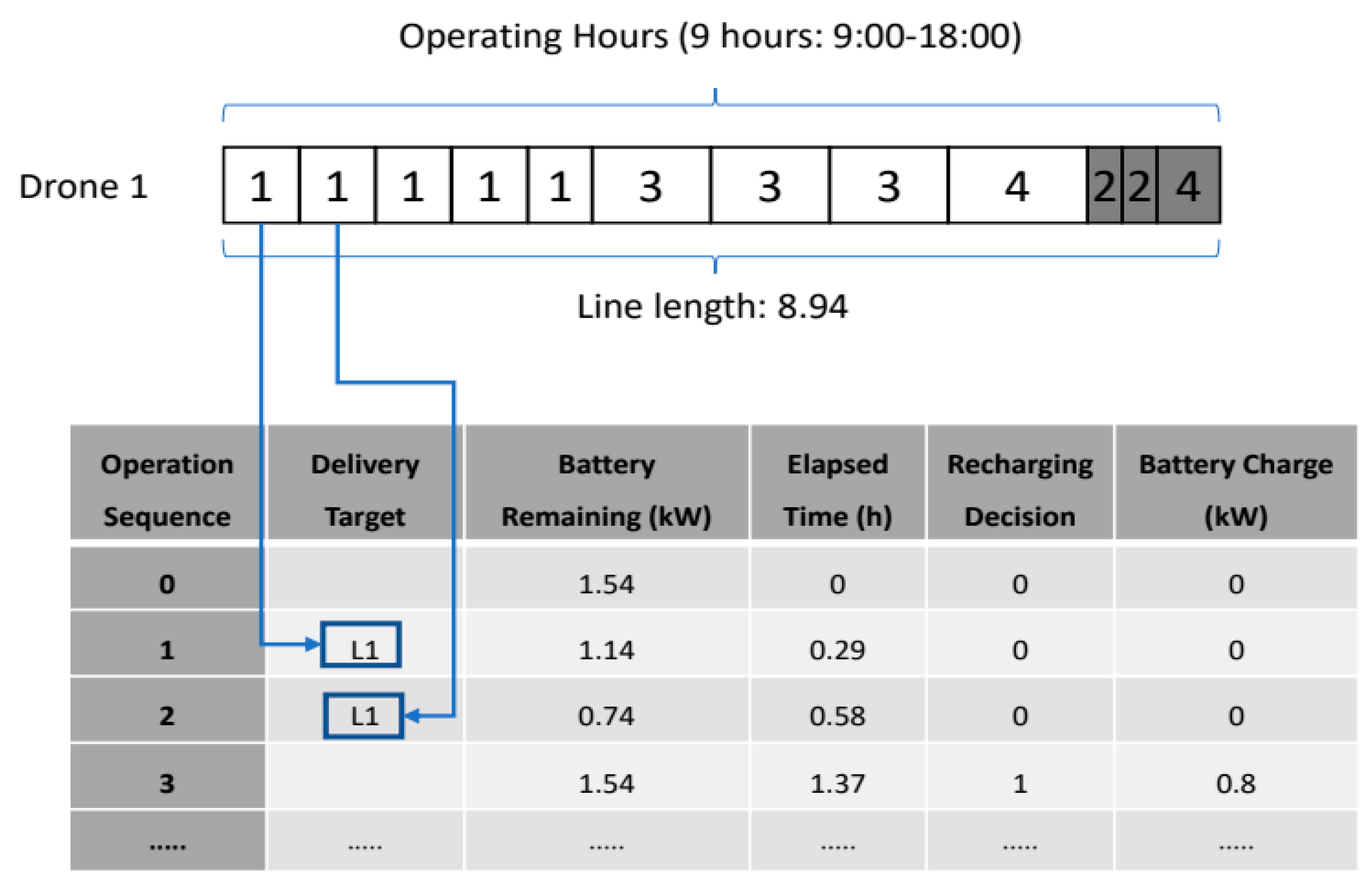
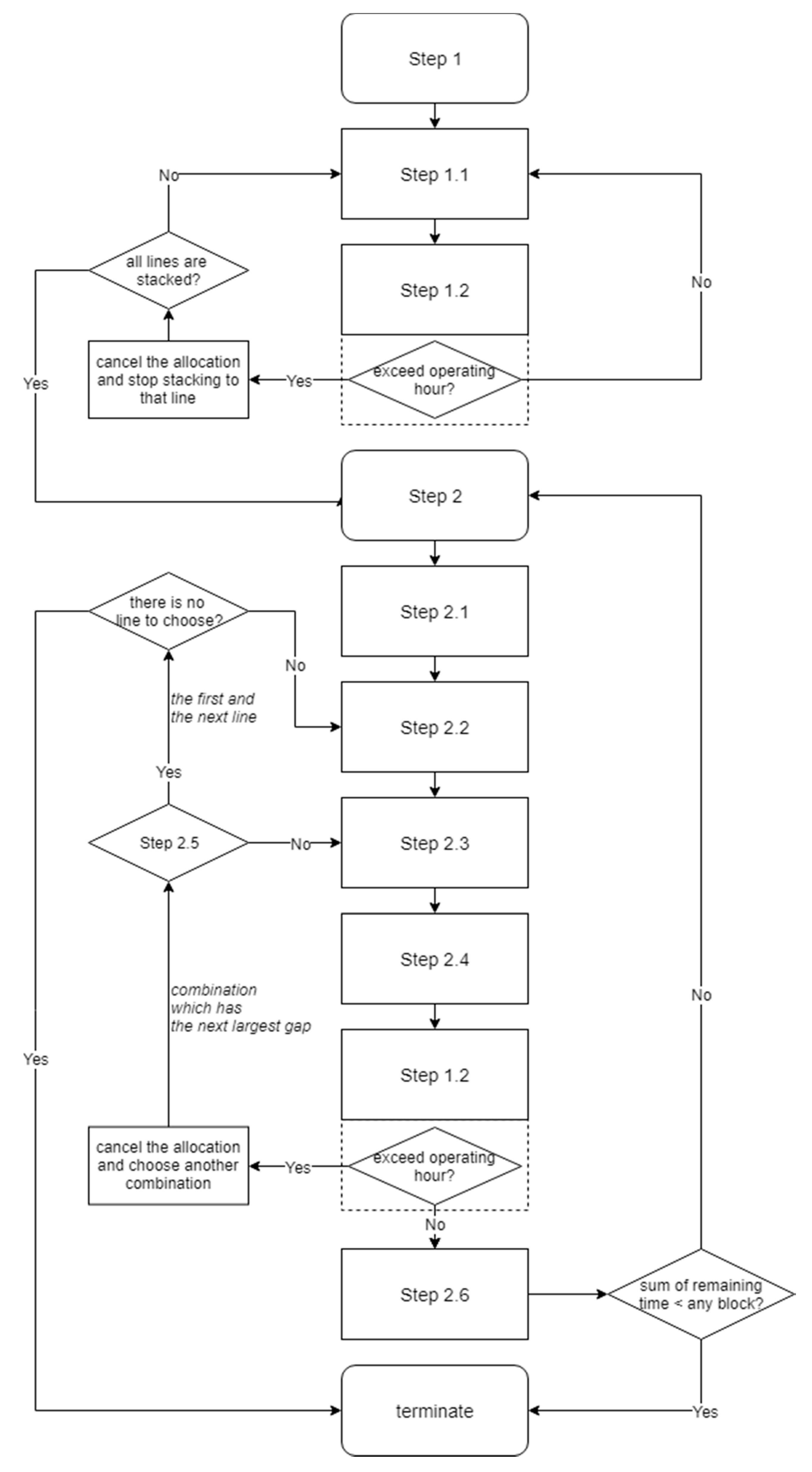
- Step 1.1: Initially, adopt a simple assignment rule for block stacking. Shorter deliveries and charging times are assigned first. Among the blocks, the shorter blocks are assigned to the drones first, as shown in Figure 2a. Each line represents a schedule or delivery work allocation for each drone. However, since our schedule should not exceed the operating hours (i.e., 9 h), we cannot assign blocks that go over the given operating hours. Thus, we need to rearrange the blocks to avoid violating the operating hours.
- Step 1.2: Whenever trying to stack any block to a line, create a power set from the line to pick up the blocks with summed charging times that are most similar to the time for a battery to be fully charged. For example, if the summed charging time from blocks ‘2′, ‘2′, and ‘4′ is 1.47, then there is only a 0.03 gap to the battery charging time (from zero to full) of 1.5. This grouping can be easily made by checking the summed charging time of each combination in the power set. The reason why we pick up those blocks as a group is that we want to allocate them at the end of the line. Because charging is no longer required after operating hours (i.e., zero battery will be okay at the end of operating hours), those blocks need to be allocated at the end of the line, as shown in Figure 2b. However, if the allocation of such a block group for any drone exceeds the operating hours, we cancel the allocation of the block group for that drone.
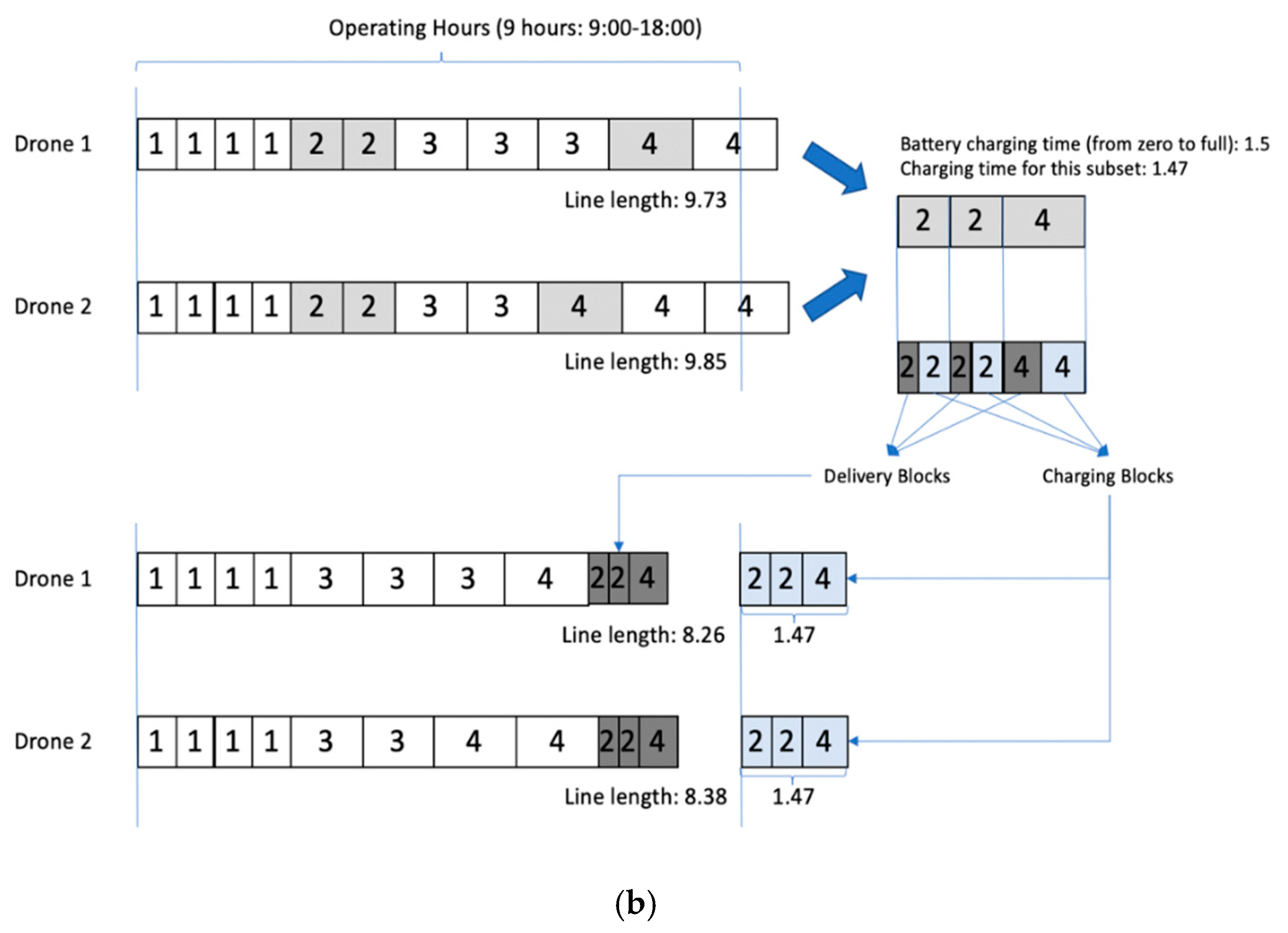
- Step 2.1: Try to make a space to add a new block that has a shorter block time among the remaining blocks (not inserted in the lines yet). To do this, the lines for the drones need be sorted in descending order of their remaining time. If any line’s length (i.e., the sum of the block times of the line) is 8.26, the remaining time of this line would be 0.74 (= 9.0–8.26).
- Step 2.2: Choose the first and the second lines from the sorted list and then find the common destinations (i.e., intersection) that exist among both lines. From those common destinations, we need to generate combinations whose elements are two destinations only. For example, if there are three destinations 1, 2, and 3 that compose the intersections of the two lines, we can generate three combinations: {1, 2}, {1, 3}, and {2, 3}.
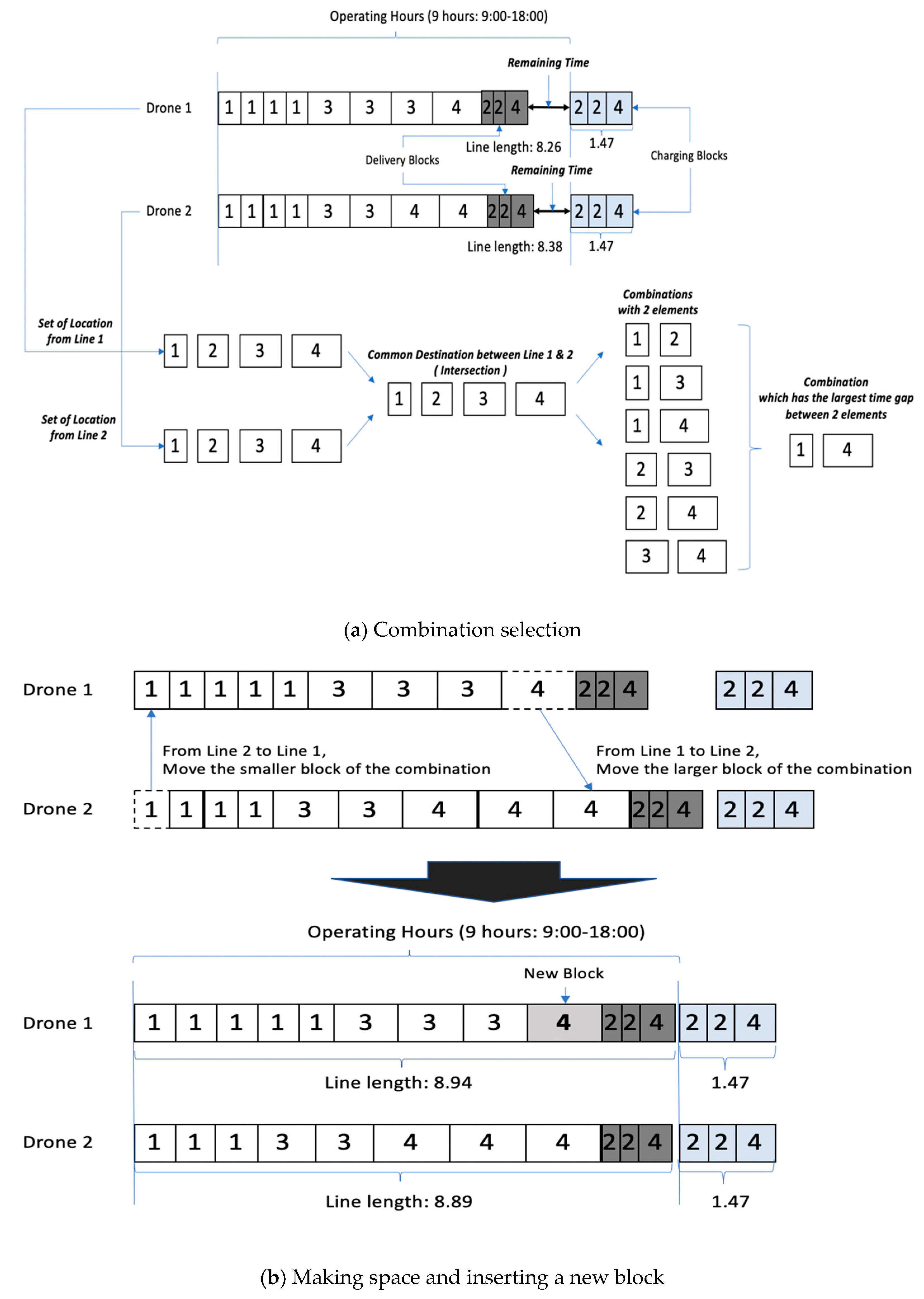
- Step 2.3: From the combinations, choose the one that has the largest gap of block time between two elements, as shown in Figure 3a. However, this gap should be less than the remaining time of the second line (the reason will be explained in Step 2.4).
- Step 2.4: Remove the smaller block of the chosen combination from the second line and stack the larger block of the chosen combination on the second line instead. If the gap between two blocks exceeds the remaining space of the second line, the larger block of the combination cannot be inserted into the second line. Repeat Step 1.2 for the modified second line. If the length of the modified second line exceeds the operating hours, return to Step 2.3 and choose another combination that has the next largest gap of block time between two elements. Otherwise, (if the length of the modified second line does not exceed the operating hours), remove the larger block of the combination from the first line and then stack the smaller block of the combination to the first line. At this moment, the modified second line becomes fixed, while the modified first line can generate a space for a new insertion, as shown in Figure 3b.
- Step 2.5: If there is no combination to consider between the first and second lines, return to Step 2.2 but choose the first line and the next line (e.g., third, fourth, fifth, etc.) with the next longest remaining times.
- Step 2.6: If there is enough space in the modified first line, stack a new block and check the feasibility of the line using Step 1.2. Repeat Steps 2.1–2.6 until the sum of the remaining time of all the lines is less than the length of any remaining block. If there is no appropriate combination to try further, it is terminated.
5. Experiments
5.1. Experimental Design
5.2. Experimental Results
6. Conclusions
7. Future Research
Author Contributions
Funding
Conflicts of Interest
Appendix A
| Algorithm A1: Pseudo Codes of the Proposed Heuristic. |
| 1: Enumerate all demand and distance information of each destination. Calculate delivery time, charging time, and battery consumption after delivering a parcel to each destination. Create a destination block for each building, which consists of delivery and charging blocks. |
| 2: Enumerate drones and consider each drone to be a container to stack blocks. |
| # Stack blocks (Step 1) |
| 3: while all containers are closed do |
| 4: Stack the smallest destination block to an open container which has the largest space. |
| 5: Create a power set made out of delivery blocks in the container, and select a subset whose summed battery consumption is most similar to the battery amount. |
| 6: Move destination blocks in the selected subset to the end of the container. Divide the moved destination blocks into delivery blocks and charging blocks, and remove charging blocks. |
| 7: L = blocks’ total length |
| 8: If L > operation time do |
| 9: Withdraw lines 4, 5, 6, and 7 |
| 10: Close the container |
| # Organize blocks to make space to stack a new block (Step 2) |
| 11: while the total remaining space of containers >= the size of the new block to stack do |
| 12: Sort containers in descending order of the total remaining space of the container. |
| 13: Select a container that has the largest remaining space (1st) and a container that has the second-largest remaining space (2nd). |
| 14: Make combinations that have 2 elements, made out of the intersection between the destinations of two selected containers. |
| 15: Select combination which has the largest gap between 2 elements on condition that this gap does not exceed the remaining space of the 2nd container. |
| 16: Remove a smaller destination block of the selected combination from the 2nd container, and stack a larger destination block of the selected combination to the 2nd container. |
| 17: With the 2nd container, implement lines 5, 6, and 7. |
| 18: If L > operating hours do |
| 19: Withdraw lines 15, 16, and 17. |
| 20: Return to line 15, and select combination which has the next largest gap. |
| 21: Else do |
| 22: Remove a larger destination block of the selected combination from the 1st container, and stack a smaller destination block of the selected combination to the 1st container. |
| 23: If there is no appropriate combination between the 1st and the 2nd containers do |
| 24: Return to line 13, and select the 1st container and a container that has the next largest space (3rd, 4th, 5th…). |
| 25: If there is enough space to stack new block do |
| 26: Stack the new block. |
| 27: Implement lines 5, 6, and 7. |
| 28: If L > operation time do |
| 29: Withdraw lines 26 and 27. |
| 30: If there is no appropriate combination among all containers do |
| 31: break |
| 32: Get schedules |
References
- Bryan, V. Drone Delivery: DHL “parcelcopter” Flies to German Isle. 2014. Available online: https://www.reuters.com/article/us-deutsche-post-drones/drone-delivery-dhl-parcelcopter-flies-to-german-isle-idUSKCN0HJ1ED20140924 (accessed on 25 May 2020).
- Madrigal, A.C. Inside Google’s Secret Drone-Delivery Program. 2014. Available online: http://www.theatlantic.com/technology/archive/2014/08/inside-googles-secret-drone-delivery-program/379306/ (accessed on 25 May 2020).
- Rose, C. Amazon’s Jeff Bezos Looks to the Future. 2013. Available online: http://www.cbsnews.com/news/amazons-jeff-bezos-looks-to-the-future (accessed on 25 May 2020).
- Stern, J. Like Amazon, UPS Also Considering Using Unmanned Flying Vehicles. 2013. Available online: http://abcnews.go.com/Technology/amazon-ups-drone-delivery-options/story?id=21086160 (accessed on 25 May 2020).
- Murphy, M. The Future is Here: Drones are Delivering Domino’s Pizzas to Customers. 2016. Available online: https://qz.com/838254/dominos-is-delivering-pizza-with-autonomous-drones-to-customers-in-new-zealand/ (accessed on 25 May 2020).
- Stewart, J. A drone-slinging UPS van delivers the Future. 2017. Available online: https://www.wired.com/2017/02/drone-slinging-ups-van-delivers-future/ (accessed on 25 May 2020).
- Xinhua. Chinese E-Commerce Giant Alibaba’s Drones Deliver Packages to Islands. 2017. Available online: http://www.xinhuanet.com//english/2017-11/08/c_136735278_3.htm (accessed on 25 May 2020).
- Lee, H.L.; Chen, Y.; Gillai, B.; Rammohan, S.; Technological Disruption and Innovation in Last-Mile Delivery. Retrieved from Stanford Graduate School of Business. 2016. Available online: https://www.gsb.stanford.edu/faculty-research/publications/technological-disruption-innovation-last-mile-delivery (accessed on 25 May 2020).
- Lim, J.; Jung, H. Drone delivery scheduling simulations focusing on charging speed, weight, and battery capacity: Case of remote islands in South Korea. In Proceedings of the 2017 Winter Simulation Conference (WSC), Las Vegas, NV, USA, 3–6 December 2017; pp. 4550–4551. [Google Scholar]
- Demir, E.; Huang, Y.; Scholts, S.; Woensel, T.V. A selected review on the negative externalities of the freight transportation: Modeling and pricing. Transp. Res. E Logist. 2015, 77, 95–114. [Google Scholar] [CrossRef]
- Song, B.D.; Park, K.; Kim, J. Persistent UAV delivery logistics: MILP formulation and efficient heuristic. Comput. Ind. Eng. 2018, 120, 418–428. [Google Scholar] [CrossRef]
- Gevaers, R.; Van de Voorde, E.; Vanelslander, T. Characteristics of innovations in last mile logistics using best practices, case studies and making the link with green and sustainable logistics. In Proceedings of the European Transport Conference, Leiden, The Netherlands, 5–7 October 2009; pp. 1–21. [Google Scholar]
- Lemke, J.; Iwan, S.; Korczak, J. Usability of the parcel lockers from the customer perspective–The research in Polish Cities. Transp. Res. Proc. 2016, 16, 272–287. [Google Scholar] [CrossRef]
- Deutsch, Y.; Golany, B. A parcel locker network as a solution to the logistics last mile problem. Int. J. Prod. 2017, 56, 251–261. [Google Scholar] [CrossRef]
- Devari, A.; Nikolaev, A.G.; He, Q. Crowdsourcing the last mile delivery of online orders by exploiting the social networks of retail store customers. Transp. Res. E Logist. 2017, 105, 105–122. [Google Scholar] [CrossRef]
- Kafle, N.; Zou, B.; Lin, J. Design and modeling of a crowdsource-enabled system for urban parcel relay and delivery. Transp. Res. B Meth. 2017, 99, 62–82. [Google Scholar] [CrossRef]
- Tarantilis, C.D.; Kiranoudis, C.T. Distribution of fresh meat. J. Food Eng. 2002, 51, 85–91. [Google Scholar] [CrossRef]
- Song, B.D.; Ko, Y.D. A vehicle routing problem of both refrigerated and general type vehicles for perishable food products delivery. J. Food Eng. 2016, 169, 61–71. [Google Scholar] [CrossRef]
- Jovanovic, A.D.; Pamucar, D.S.; Pejcic-Tarle, S. Green vehicle routing in urban zones: A neuro-fuzzy approach. Expert Syst. Appl. 2014, 41, 3189–3203. [Google Scholar] [CrossRef]
- Desaulniers, G.; Errico, F.; Irnich, S.; Schneider, M. Exact algorithms for electric vehicle routing problems with time windows. Oper. Res. 2016, 64, 1388–1405. [Google Scholar] [CrossRef]
- Lee, K.; Chae, J.; Kim, J. A courier service with electric bicycles in an Urban Area: The case in Seoul. Sustainability 2019, 11, 1255. [Google Scholar] [CrossRef]
- Clarke, R. Understanding the drone epidemic. Comput. Law Secur. Rev. 2014, 30, 230–246. [Google Scholar] [CrossRef]
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Ferrandez, S.M.; Harbison, T.; Weber, T.; Sturges, R.; Rich, R. Optimization of a truck-drone in tandem delivery network using k-means and genetic algorithm. Int. J. Ind. 2016, 9, 374–388. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 70–85. [Google Scholar] [CrossRef]
- Campbell, J.F.; Sweeney, D.C.; Zhang, J. Strategic design for delivery with trucks and drones. Supply Chain Anal. Rep. SCMA. 2017, 04(1), 1–38. [Google Scholar]
- Agatz, N.; Bouman, P.; Schmidt, M.; Optimization approaches for the traveling salesman problem with drone. ERIM Report Series in Management. 2018. Reference No. ERS-2015-011-LIS. Available online: http://ssrn.com/abstract=2639672 (accessed on 25 May 2020).
- Ha, Q.M.; Deville, Y.; Pham, Q.D.; Ha, M.H. On the min-cost traveling salesman problem with drone. Transp. Res. Part C Emerg. Technol. 2018, 86, 597–621. [Google Scholar] [CrossRef]
- Jeong, H.Y.; Song, B.D.; Lee, S. Truck-drone hybrid delivery routing: Payload-energy dependency and No-Fly zones. Int. J. Prod. Econ. 2019, 214, 220–233. [Google Scholar] [CrossRef]
- Torabbeigi, M.; Lim, G.J.; Kim, S.J. Drone delivery scheduling optimization considering payload-induced battery consumption rates. J. Intell. Robot. Syst. 2020, 97, 471–487. [Google Scholar] [CrossRef]
- eMarketer. A Brief Overview of the Global Ecommerce Market. eMarketer Retail, 2019. Available online: https://retail.emarketer.com/article/brief-overview-of-global-ecommerce-market/59690010ebd40005284d5cc5 (accessed on 25 May 2020).
- Wang, F.; Zhu, Y.; Wang, F.; Liu, J.; Ma, X.; Fan, X. Car4Pac: Last mile parcel delivery through intelligent car trip sharing. IEEE Trans. Intell. Transp. Syst. 2019, Early Access. 1–15. [Google Scholar] [CrossRef]
- Castagno, J.; Yao, Y.; Atkins, E. Realtime Rooftop Landing Site Identification and Selection in City Simulation. 2019. Available online: https://arxiv.org/abs/1903.03829 (accessed on 9 June 2020).
- D’Andrea, R. Can drones deliver? IEEE Trans. Autom. Sci. Eng. 2014, 11, 647–648. [Google Scholar] [CrossRef]
- IBM Knowledge Center. Running out of Memory. 2017. Available online: https://www.ibm.com/support/knowledgecenter/en/SSSA5P_12.10.0/ilog.odms.cplex.help/CPLEX/UsrMan/topics/discr_optim/mip/troubleshoot/61_mem_gone.html (accessed on 15 June 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Unit | Value |
|---|---|---|
| Vehicle mass | kg | 8 |
| (Maximum) Payload mass | kg | 2 |
| (Average) Cruising velocity | km/h | 50 |
| Power transfer efficiency for motor and propeller | - | 0.5 |
| Lift to drag ratio | - | 3 |
| Power consumption of electronics | kWh | 0.1 |
| Battery consumption | kWh | 0.6 |
| Battery capacity | kW | 1.54 |
| Recharging time (to full) | hour | 1.5 |
| Operating hours | hour | 9 |
| Incidental working hours (take-off, landing, loading and dropping packages) | hour | 0.25 |
| # | Size | # of Drones | # of Destinations | GUROBI | Heuristic | ||
|---|---|---|---|---|---|---|---|
| Objective Value | Computational Time (sec) | Objective Value | Computational Time (sec) | ||||
| 1 | Small | 2 | 10 | 33 | 0.11 | 33 | 0.08 |
| 2 | 26 | 0.16 | 26 | 0.18 | |||
| 3 | 31 | 0.22 | 31 | 1.11 | |||
| 4 | 26 | 0.1 | 26 | 0.18 | |||
| 5 | 30 | 0.16 | 30 | 0.08 | |||
| 6 | 26 | 0.01 | 26 | 0.19 | |||
| 7 | 27 | 0.09 | 27 | 0.06 | |||
| 8 | 30 | 0.08 | 30 | 0.39 | |||
| 9 | 29 | 0.32 | 29 | 0.61 | |||
| 10 | 30 | 0.28 | 30 | 0.51 | |||
| 11 | 28 | 0.29 | 28 | 0.37 | |||
| 12 | 29 | 0.01 | 29 | 0.15 | |||
| 13 | 25 | 0.41 | 25 | 0.11 | |||
| 14 | 29 | 0.23 | 29 | 0.46 | |||
| 15 | 24 | 0.01 | 24 | 0.09 | |||
| 16 | 30 | 0.01 | 30 | 0.15 | |||
| 17 | 31 | 0.11 | 31 | 1.06 | |||
| 18 | 25 | 0.07 | 25 | 0.12 | |||
| 19 | 28 | 0.11 | 28 | 0.09 | |||
| 20 | 24 | 0.01 | 24 | 0.07 | |||
| Average: | 0.14 | 0.3 | |||||
| 21 | Medium | 4 | 20 | 55 | 3.55 | 55 | 0.67 |
| 22 | 55 | 1.34 | 55 | 0.58 | |||
| 23 | 61 | 1.08 | 61 | 2.04 | |||
| 24 | 57 | 3.49 | 57 | 0.92 | |||
| 25 | 59 | 6.29 | 59 | 2.21 | |||
| 26 | 53 | 1.42 | 53 | 0.77 | |||
| 27 | 57 | 3.26 | 57 | 1.12 | |||
| 28 | 59 | 5.81 | 59 | 2.25 | |||
| 29 | 56 | 12.4 | 56 | 1.19 | |||
| 30 | 61 | 1.44 | 61 | 2.12 | |||
| 31 | 61 | 49.57 | 61 | 0.36 | |||
| 32 | 56 | 1.22 | 56 | 0.93 | |||
| 33 | 52 | 29.21 | 52 | 1.12 | |||
| 34 | 58 | 0.85 | 58 | 0.33 | |||
| 35 | 59 | 1.54 | 59 | 0.28 | |||
| 36 | 58 | 6.27 | 58 | 2.08 | |||
| 37 | 60 | 0.99 | 60 | 0.12 | |||
| 38 | 59 | 2.73 | 59 | 1.08 | |||
| 39 | 58 | 3.35 | 58 | 1.07 | |||
| 40 | 55 | 8.41 | 55 | 1.22 | |||
| Average: | 7.21 | 1.12 | |||||
| 41 | Large | 10 | 50 | - | - | 141 | 6.55 |
| 42 | - | - | 136 | 3.36 | |||
| 43 | - | - | 146 | 10.01 | |||
| 44 | - | - | 143 | 4.99 | |||
| 45 | - | - | 141 | 8.03 | |||
| 46 | - | - | 142 | 7.27 | |||
| 47 | - | - | 147 | 7.67 | |||
| 48 | - | - | 145 | 6.29 | |||
| 49 | - | - | 142 | 4.09 | |||
| 50 | - | - | 151 | 15.87 | |||
| 51 | - | - | 140 | 4.89 | |||
| 52 | - | - | 145 | 7.53 | |||
| 53 | - | - | 145 | 9.12 | |||
| 54 | - | - | 145 | 8.75 | |||
| 55 | - | - | 145 | 10.93 | |||
| 56 | - | - | 144 | 11.99 | |||
| 57 | - | - | 155 | 8.78 | |||
| 58 | 148 | 16.41 | 148 | 3.83 | |||
| 59 | - | - | 147 | 9.09 | |||
| 60 | 133 | 40.22 | 133 | 1.15 | |||
| Average: | 7.51 | ||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Moon, H.; Jung, H. Drone-Based Parcel Delivery Using the Rooftops of City Buildings: Model and Solution. Appl. Sci. 2020, 10, 4362. https://doi.org/10.3390/app10124362
Kim J, Moon H, Jung H. Drone-Based Parcel Delivery Using the Rooftops of City Buildings: Model and Solution. Applied Sciences. 2020; 10(12):4362. https://doi.org/10.3390/app10124362
Chicago/Turabian StyleKim, Junsu, Hongbin Moon, and Hosang Jung. 2020. "Drone-Based Parcel Delivery Using the Rooftops of City Buildings: Model and Solution" Applied Sciences 10, no. 12: 4362. https://doi.org/10.3390/app10124362
APA StyleKim, J., Moon, H., & Jung, H. (2020). Drone-Based Parcel Delivery Using the Rooftops of City Buildings: Model and Solution. Applied Sciences, 10(12), 4362. https://doi.org/10.3390/app10124362