Feasibility Test and Analysis for Heavy Haul Freight Using WDPS Based on MIMO-OFDM


Abstract
1. Introduction
2. System Configuration
2.1. Overview of WDPS Development Methodology
- Configuration of heavy haul freight: That consisted of a master locomotive, 50 freights and a slave locomotive. The master and slave locomotives are equipped with WDPS to distribute traction and braking control command data.
- Operation speed: An average speed of 100 km/h
- Test section: The approximately 21 km from Jillye station to Busansinhang station in Korea.
- Common requirement: The heavy haul freight with WDPS should perform the same main function and safety function of the freight train operation using the existing centralized control.
2.2. Electrical Interface of Electric Locomotive
2.3. WDPS Configuration for Distributed Control of Heavy Haul Freight
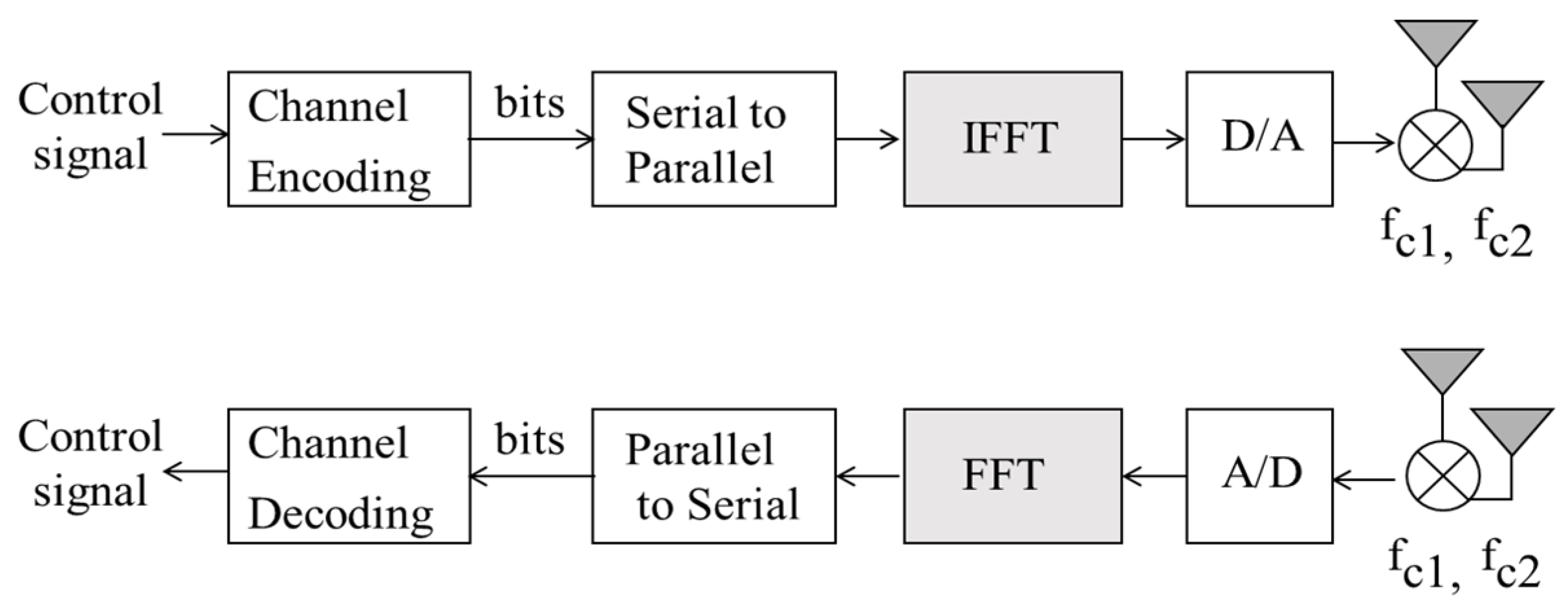
2.3.1. WDPS-Based MIMO-OFMD
2.3.2. WDPS Protocol
2.4. Safety Circuit
- The communication failure: when the wireless communication is cut off for more than 2 s, the safety circuit operates to generate and emergency braking command, and that the cause of failure is indicated on the DU.
- The EB condition of ID 8503 or ID 8506 locomotive: Since the freights are non-powered, the emergency brake contact (EMBR) of the GDB in locomotives is connected to the WDPS to configure the safety circuit as follows, if any of the following configurations are interrupted, the emergency braking command generated.[GDB EMBR signal detection of master locomotive] → [WDPS] → [slave locomotive EB loop open] → [master locomotive EB command] → [EMBR signal of slave locomotive detection] → [WDPS] → [master locomotive EB loop open]
3. Measurement and Test
3.1. Braking Performance Measurement and Analysis
3.2. WDPS Performance Measurement and Analysis
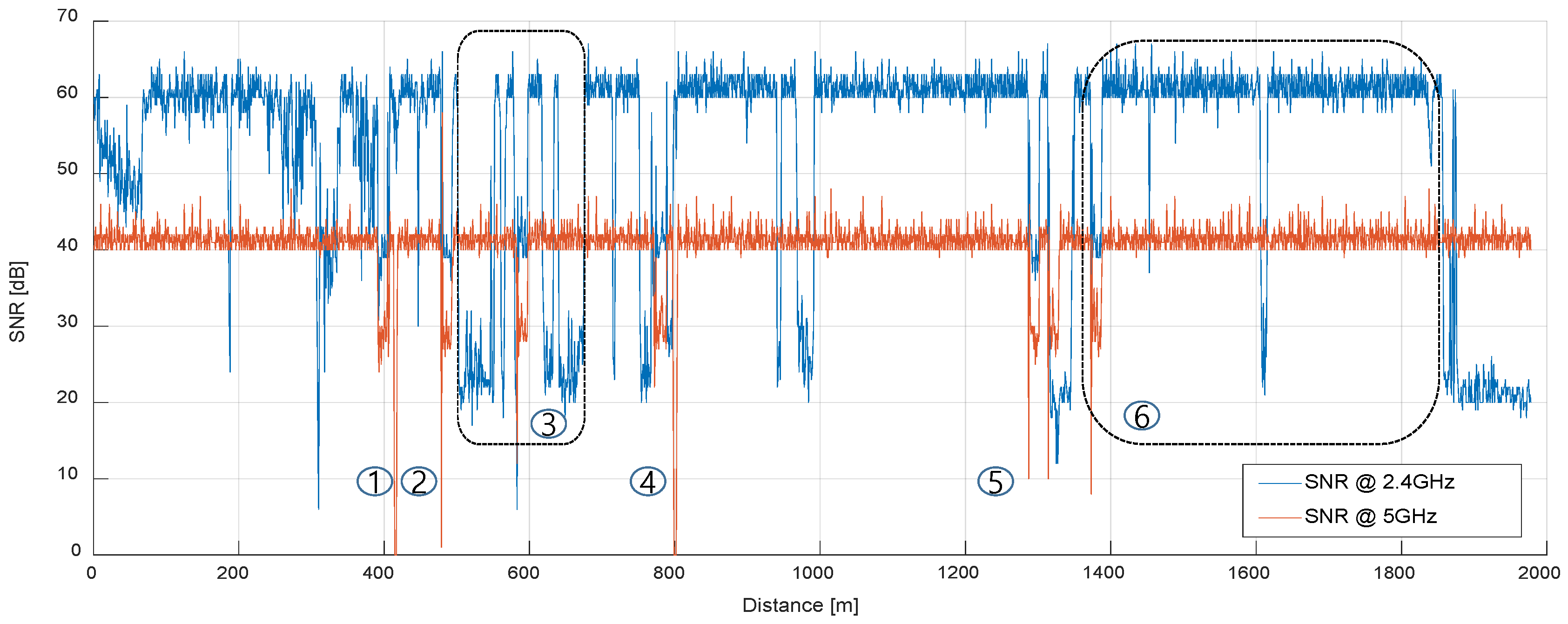
Measured WDPS SNR Analysis
3.3. Functional Test Results
4. Conclusions
- (1)
- We confirmed the operational applicability of distributed control technology for heavy haul freight with WDPS based on WiFi for the first time in Korea. Communication performance, braking performance, and train operation functions (propulsion/braking command, pantograph function, MCB function, and safety circuit) were verified on the track.
- (2)
- Due to the distributed control by WDPS, the braking tube pressure of the master locomotive and the slave locomotive was simultaneously controlled. Therefore, it was confirmed through measurement that the braking and release time of the heavy haul freight was about 1.5 times faster. This can be expected to improve the operational efficiency of freights.
- (3)
- Through SNR measurement of WDPS, it was confirmed that the topography of the track is a major influence on communication performance. Although the same tunnel section, the difference of SNR was confirmed according to the meandering section and the straight flat section due to continuous curves and gradients, that is, whether the LOS was guaranteed.
- (4)
- For the stable operation of WDPS, the first method should be arranged so that the wireless device satisfies the LOS condition when applying the high-frequency band. The second method when choosing a frequency, we can allocate two or more other channels in the 2.4 GHz band or consider the latest communication methods in the band below the 2.4 GHz band (e.g., LTE in 850, 950, 900 MHz, 1.8 GHz, etc.).
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AP | Access Point |
| BC | Brake Cylinder |
| BP | Brake Pipe |
| CAN | Controller Area Network |
| CCU | Central Control Unit |
| DU | Display Unit |
| EB | Emergency Brake |
| ECP | Electronic Controlled Pneumatic |
| EMBR | Emergency Brake contact Relay |
| FSB | Full Service Brake |
| FSK | Frequency Shift keying |
| GDB | General Distributed Board |
| ID | Identification |
| ISI | Inter Symbol Interference |
| KORAIL | Korea Rail Corporation |
| LOS | Line Of Sight |
| MCB | Main Circuit Breaker |
| MIMO | Multi-Input Multi-Output |
| MVB | Multifunction Vehicle Bus |
| NLOS | Non-Line Of Sight |
| OFDM | Orthogonal Frequency Division Multiplexing |
| RSSI | Received Signal Strength Indication |
| SNR | Signal to Noise Ratio |
| TCN | Train Communication Network |
| TCMS | Train Control and Monitoring System |
| WDPS | Wireless Distributed Power System |
| WTB | Wire Train Bus |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Description |
| Electric feeding | AC 25,000 V 60 Hz |
| braking | Electric/air braking(P4a) |
| power of traction | 450 kN |
| control | VVVF-IGBT |
| Signal | ATS/ATP |
| network | TCN 2.0 (MVB, WTB) |
Appendix B
| Measuring location | Centralized Control FSB | Distributed Control FBS | ||||||
|---|---|---|---|---|---|---|---|---|
| Brake Delay Time [s] | Brake Equivalent Response Time [s] | Brake Release Delay Time [s] | Release Time [s] (0 bar) | Brake Delay Time [s] | Brake Equivalent Response Time [s] | Brake Release Delay Time [s] | Release Time [s] (0 bar) | |
| Locomotive | 1.4 | 8.2 | 6.3 | 46.0 | 1.2 | 7.6 | 5.4 | 20.0 |
| 1st freight | 0.7 | 8.4 | 5.8 | 19.8 | 0.4 | 8.6 | 5.2 | 17.0 |
| 10th freight | 1.2 | 22.0 | 3.0 | 21.4 | 1.0 | 15.6 | 6.5 | 19.0 |
| 20th freight | 1.7 | 26.0 | 15.2 | 40.8 | 1.4 | 13.6 | 8.8 | 21.4 |
| 30th freight | 4.4 | 26.0 | 20.0 | 45.2 | 2.0 | 12.8 | 9.2 | 21.2 |
| 50th freight | 3.4 | 32.0 | 23.2 | 43.6 | 0.9 | 10.6 | 4.2 | 12.6 |
Appendix C
| Measuring Location | Centralized control EB | Distributed control EB | ||||||
|---|---|---|---|---|---|---|---|---|
| Brake Delay Time [s] | Brake Equivalent Response Time [s] | Brake Release Delay Time [s] | Release Time [s] (0 bar) | Brake Delay Time [s] | Brake Equivalent Response Time [s] | Brake Release Delay Time [s] | Release Time [s] (0 bar) | |
| Locomotive | 0.4 | 1.8 | 37.0 | 91.0 | 0.4 | 1.7 | 28.4 | 58.2 |
| 1st freight | 0.2 | 2.87 | 13.4 | 24.0 | 0.2 | 2.4 | 13.8 | 24.4 |
| 10th freight | 0.7 | 4.3 | 23.4 | 44.0 | 0.6 | 4.0 | 22.4 | 34.0 |
| 20th freight | 1.2 | 5.8 | 45.6 | 68.2 | 1.2 | 5.2 | 27.8 | 39.8 |
| 30th freight | 1.7 | 7.0 | 46.2 | 64.6 | 1.6 | 5.4 | 24.6 | 35.8 |
| 50th freight | 2.9 | 8.7 | 49.6 | 65.2 | 0.4 | 1.8 | 13.0 | 21.4 |
Appendix D
| Item | Description | |
|---|---|---|
| 2.4 G chip | TX | 18~23 dBm |
| IEEE 802.11 b/g/n | RX | −90 dBm |
| 5 G chip | TX | 18~23 dBm |
| IEEE 802.11a/n | RX | −90 dBm |
| ANTENNA beam width | 50° (Nominal) | |
| ANTENNA gain | 8~12 dBi | |
| VSWR | 2.0: 1 | |
| polarization | Linear | |
| Impedance | 50 Ω | |
References
- Yang, J.H. A study on the development of logistics information technology for revitalization of railway transports. Korea Electron. Trade 2009, 7, 125–151. [Google Scholar] [CrossRef]
- Zhang, L.; Zhuan, X. Optimal operation of heavy-haul trains equipped with electronically controlled pneumatic brake systems using model predictive control methodology. IEEE Trans. Control Syst. Technol. 2014, 22, 13–22. [Google Scholar] [CrossRef]
- Hamilton, B.A. ECP Brake System for Freight Service; FRA Report: Washington, DC, USA, 2006. [Google Scholar]
- Carriere, K.J.; Halowell, J.; Kull, R.; Wolf, C. ECP brake design changes, system improvements and technology progression. In Proceedings of the IHHA 2015 Conference, Perth, Australia, 21–24 June 2015. [Google Scholar]
- Adnan, B.M.; Alamgir, F.M. Performance simulation and comparision in High Altitude Platforms (HAPs) communications systems under PSK, DPSK, QAM & FSK modulation schemes and AWGN, Rician & Rayleigh communication channels. In Proceedings of the 2016 IEEE 7th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, USA, 13–15 October 2016; pp. 1–11. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, C.; Ma, D. Influence of locomotive wireless sync control technology on the longitudinal force of 20000t heavy haul combined train. J. China Rail. Sci. 2008, 29, 78–83. [Google Scholar]
- Gao, C.; Ji, B.; Zhang, B. Research and application of LOCOTROL technologies for heavy haul trains on Datong-Qinhuangdao railway line. J. Electr. Locomot. Mass Transit Veh. 2006, 29, 5–741. [Google Scholar]
- Huang, S.; Zhang, F.; Guo, Q.; Dong, D. Synchronous control system based on wireless data transmission for 50,000-t heavy-haul trains. Adv. Mech. Eng. 2018, 10, 1687814018784827. [Google Scholar] [CrossRef]
- ITU-R Report M.2442-0 (11/2018), Current and Future Usage of Railway Radio Communication Systems Between Train and Trackside. Available online: https://www.itu.int/pub/R-REP-M.2442-2019 (accessed on 12 June 2012).
- Sniady, A.; Soler, J. LTE for railways: Impact on performance of ETCS railway signaling. IEEE Veh. Technol. Mag. 2014, 9, 69–77. [Google Scholar] [CrossRef]
- Ai, B.O.; Cheng, X.; Kürner, T.; Zhong, Z.; Guan, K.; He, R.; Xiong, L.; David, W.M.; David, G.M.; Briso-Rodriguez, C. Challenges toward wireless communications for high-speed railway. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2143–2158. [Google Scholar] [CrossRef]
- Moreno, J.; Riera, J.M.; de Haro, L.; Rodriguez, C. A survey on future railway radio communications services: Challenges and opportunities. IEEE Commun. Mag. 2015, 53, 62–68. [Google Scholar] [CrossRef]
- Mahasukhon, P.; Sharif, H.; Hempel, M.; Zhou, T.; Ma, T.; Shrestha, P.L. A study on energy efficient multi-tier multi-hop wireless sensor networks for freight-train monitoring. In Proceedings of the 2011 7th International Wireless Communications and Mobile Computing Conference, Istanbul, Turkey, 4–8 July 2011; pp. 297–301. [Google Scholar] [CrossRef]
- Schiavo, A.L. Fully autonomous wireless sensor network for freight wagon monitoring. IEEE Sens. J. 2016, 16, 9053–9063. [Google Scholar] [CrossRef]
- Li, X.; Song, Q.; Tao, H.; Liu, X.; Zhang, S.; Wang, X.; Luo, Q.; Peng, X. Evaluation on anti-interference to WLAN equipments for spatial deployment of CBTC systems in tunnels. In Proceedings of the 2014 IEEE/CIC International Conference on Communications in China (ICCC), Shanghai, China, 13–15 October 2014; pp. 47–52. [Google Scholar] [CrossRef]
- IEEE1474.1-2004—IEEE Standard for Communications-Based Train Control (CBTC) Performance and Functional Requirements. 2005, pp. 1–45. Available online: https://standards.globalspec.com/std/1233374/IEEE%201474.1 (accessed on 12 June 2012).
- Pascoe, R.D.; Eichorn, T.N. What is communication-based train control? Veh. Technol. Mag. IEEE 2009, 4, 16–21. [Google Scholar] [CrossRef]
- IEC 61375-2-1, Electronic railway equipment—Train communication network (TCN)—Part 2-1: Wire Train Bus (WTB). Available online: https://standards.globalspec.com/std/1529862/iec-61375-2-1 (accessed on 12 June 2012).
- IEC 61375-3-1, Electronic railway equipment—Train communication network (TCN)—Part 3-1: Multifunction Vehicle Bus (MVB). Available online: https://standards.globalspec.com/std/1529853/iec-61375-3-1 (accessed on 12 June 2012).
- Chen, S.; Zhu, C. ICI and ISI analysis and mitigation for OFDM systems with insufficient cyclic prefix in time-varying channels. IEEE Trans. Consum. Electron. 2004, 50, 78–83. [Google Scholar] [CrossRef]
- Steendam, H.; Moeneclaey, M. Analysis and optimization of the performance of OFDM on frequency-selective time-selective fading channels. IEEE Trans. Commun. 1999, 47, 1811–1819. [Google Scholar] [CrossRef]
- Nowak, T.; Hartmann, M.; Zech, T.; Thielecke, J. A path loss and fading model for RSSI-based localization in forested areas. In Proceedings of the 2016 IEEE-APS Topical Conference on Antennas and Propagation in Wireless Communications (APWC), Cairns, Australia, 19–23 September 2016. [Google Scholar] [CrossRef]
- Bae, J.-N.; Park, W.-C.; Kim, J.-Y. Performance of MIMO-OFDM system with linear pre-equalization over fading channel. J. Korean Inst. Electromagn. Eng. Sci. 2010, 21, 1269–1274. [Google Scholar] [CrossRef]
- Lee, D.K.; Park, S.W.; Lee, G.; Kim, K.; Shin, P.W. Brake system characteristics analysis in domestic long freight train configuration. J. Korean Railw. Soc. 2017, 359–362. [Google Scholar]





| Interface | Description |
|---|---|
| WDPS ↔ braking unit | braking control command |
| WDPS ↔ CCU | speed data, braking data, pantograph data, MCB data, moving distance, master or slave data, etc. |
| Test Item | Results | ||
|---|---|---|---|
| Brake Equivalent Response Time | Brake Release Times (Measured) | ||
| FSB | Centralized control | 23.6 s | 25.4 s at 30th freight |
| Distributed control | 7.0 s | 8.8 s at 20th freight | |
| EB | Centralized control | 5.9 s | 44.2 s at 30th freight |
| Distributed control | 3.6 s | 18.4 s at 20th freight | |
| Test Item | Result |
| Pantograph function | Valid raise/down pantograph signal is detected and pantograph state is correctly displayed on DU. |
| Main circuit breaker function | Valid Main circuit breaker close signal is detected and main breaker state is correctly displayed on DU. |
| Air compressor control | Valid air compression on signal is detected and air compressor state is correctly displayed on DU. |
| Emergency brake function | Valid EB signal is detected and brake mode is correctly displayed on DU. |
| Service brake function | Valid SB signal is detected, command is executed and cylinder pressure is correctly displayed on DU. |
| Safety circuit function | Valid safety circuit cutoff is detected, emergency brake mode is correctly displayed on DU. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Park, T. Feasibility Test and Analysis for Heavy Haul Freight Using WDPS Based on MIMO-OFDM. Appl. Sci. 2020, 10, 4074. https://doi.org/10.3390/app10124074
Lee K, Park T. Feasibility Test and Analysis for Heavy Haul Freight Using WDPS Based on MIMO-OFDM. Applied Sciences. 2020; 10(12):4074. https://doi.org/10.3390/app10124074
Chicago/Turabian StyleLee, Kangmi, and Taewon Park. 2020. "Feasibility Test and Analysis for Heavy Haul Freight Using WDPS Based on MIMO-OFDM" Applied Sciences 10, no. 12: 4074. https://doi.org/10.3390/app10124074
APA StyleLee, K., & Park, T. (2020). Feasibility Test and Analysis for Heavy Haul Freight Using WDPS Based on MIMO-OFDM. Applied Sciences, 10(12), 4074. https://doi.org/10.3390/app10124074