2.1. Related Work
Path planning-based reconnaissance establishes a path in advance by a central operator or planner before reconnoitering the scanning area. When the path is determined, a UAV flies along with the planned path [
17]. In [
18], the authors studied a path planning based on multiple UAVs for a polygonal-shaped area. The convex areas are partitioned into the same number as UAVs. The UAVs perform patrolling missions in their own assigned area. If a UAV malfunctions, the area allocated to each UAV is re-established. In [
4,
5,
6,
8,
11], authors studied path-planning with optimization algorithms such as bee colony [
4], ant colony [
5], particle swarm [
6,
8,
11], etc. They planed optimal paths to avoid threatening spots (e.g., an area easily detected by enemy radar) or to pass through important locations. On the other hand, if there are no important locations and threatening spots, the UAV moves straight to the destination established by the operator.
In [
19], the authors categorized the Paparazzi mobility model [
20] and the Semi-Random Circular Movement model [
21] into the path-planned method because those models move with certain patterns. The Paparazzi mobility model has five movement patterns which are stay-at, oval, way-point, eight, and scan. The probabilities for performing stay-at, oval, and scan are 30% each, while those of selecting eight and way-point patterns are 5% each. The Semi-Random Circular Movement model is proposed to patrol specific areas based on orbiting movement. In this model, a UAV generates several destinations to fly with a spiral pattern. Once arriving at the final destination, the UAV generates new destinations and repeats this process.
The second approach is the reconnaissance based on the random mobility model which is well-known for modeling a movement of mobile node over a time period not only in mobile ad-hoc networks (MANET) but also in flying ad-hoc networks (FANET) [
22]. The Random Waypoint model has been used as a basic model because of its simplicity [
23]. A UAV generates a new destination randomly in the scanning area and then moves to that destination. When a UAV arrives at the destination, it repeats this process. The Random Markov Process model [
12] is another random mobility model which stochastically decides one of three actions: Turn-left, straight ahead, and turn-right.
The Gauss–Markov mobility model [
24] represents realistic movement of a node because it determines the next coordinate from the previous velocity and direction. This model was designed to adjust randomness of diverse levels by applying one tuning parameter. The Enhanced Gauss–Markov mobility model [
16] applies the Gauss–Markov model for UAV reconnaissance. This model considers smooth movement within the scanning area and a smooth turn in the boundary area. When a node approaches near the boundary area, it avoids a collision by changing mean direction deviation and mean variance of direction deviation.
The Distributed Pheromone Repel (DPR) model [
12] is inspired by the swarm intelligence which is the collective behavior of animals such as ants, bees, birds, etc. Ants interact by sharing their local information and move toward the strong pheromone. On the other hand, as the DPR model is designed for reconnaissance, UAVs move to areas with less pheromones. Each node has its own virtual map to store pheromone distribution and updates the map by broadcasting with nearby nodes. Other models based on pheromones are the Hybrid Markov Mobility Model with Pheromones (H3MP) [
13] and the Multiple Pheromone UAV Mobility Model (MPUMM) [
14]. H3MP is proposed for a patrol-surveillance scenario to detect targets in a realistic area that is non-square. It divides the area into
N zones with the K-means algorithm. A UAV moves toward a zone with transition probabilities based on pheromones and the number of detections. In MPUMM, a UAV operates with two pheromones which are repulsive and attractive. The repulsive pheromone is used for reconnaissance. A UAV reconnoiters the scanning area with repulsive pheromone when there is no target. On the other hand, the attractive pheromone is employed for target tracking. If a UAV discovers a target, the UAV traces that target by attractive pheromone.
Random Destination with Partitioned Zone is another model which reconnoiters by communicating with each UAV [
15]. This model divides the scanning area to be reconnoitered into
zones and manages the number of visited destinations in each zone by communicating with the nearby UAVs. When a UAV flies to the destination, it stochastically selects the zone with fewer destinations.
2.2. Research Motivation
Random mobility models are beneficial for multi-UAV reconnaissance due to their randomness and robustness to failure. In the path-planning reconnaissance, it is possible for targets or enemies to predict UAVs’ movement so that they can hide for the expected reconnaissance time. On the contrary, the random mobility model makes it difficult to predict the reconnaissance time. In addition, the random mobility model can endure some malfunctions of UAVs because a UAV can visit anywhere in the reconnaissance area.
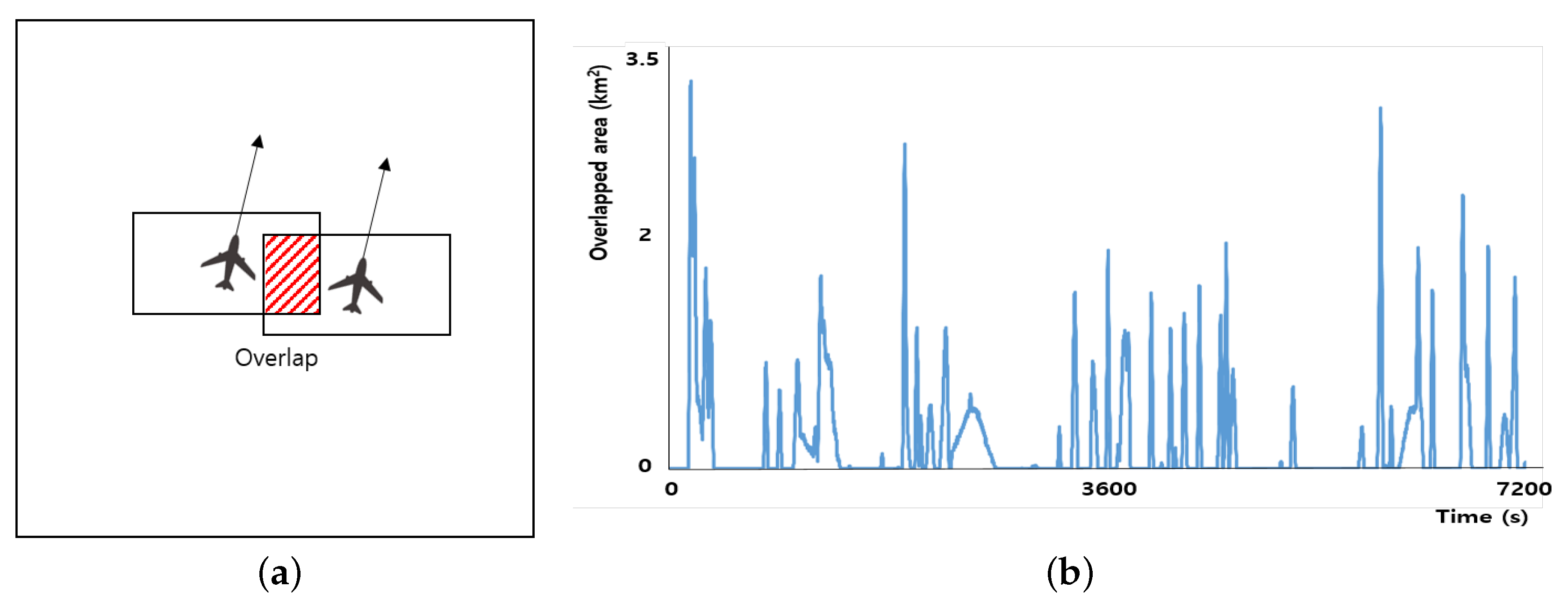
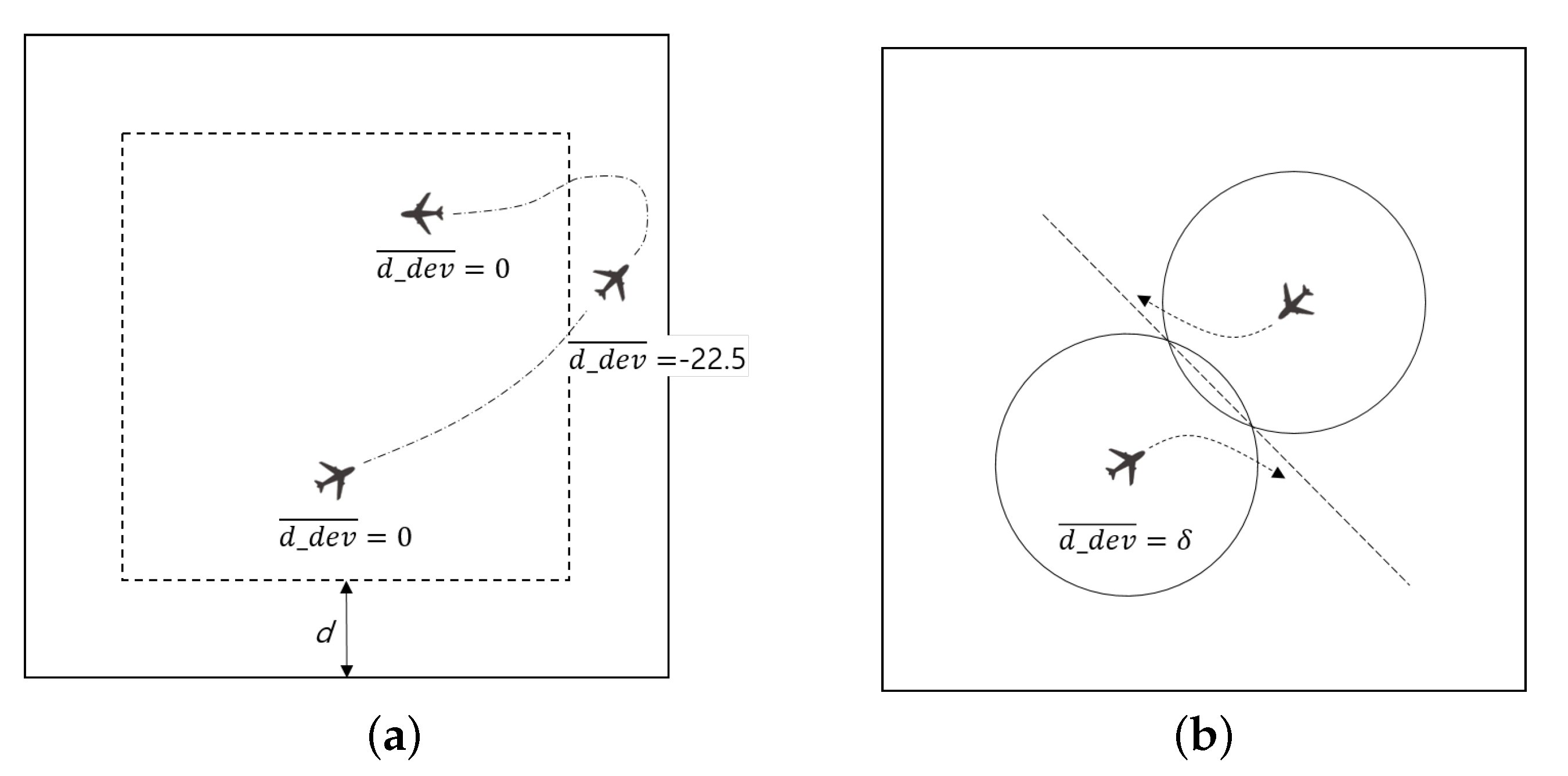
However, one weakness of multi-UAVs reconnaissance based on the random mobility model is overlapped reconnaissance which is defined by simultaneous reconnaissance of the same area by two or more UAVs. As the scan area or camera scanning area is larger than the UAV, a part of the scan area can be overlapped by multiple UAVs, as shown in
Figure 1a. If two UAVs fly towards a similar destination with an overlapped area, the overlapped area becomes the loss in terms of coverage efficiency. Even in the case where two UAVs at the same instant fly in the opposite directions with overlapped areas, the area scanned by one UAV can be re-visited soon by the other UAV. This is a cause of imbalance of reconnaissance. The overlapped reconnaissance can also lead to collision of UAVs.
Figure 1a shows an example of overlapped reconnaissance area for random mobility model-based reconnaissance. We simulated Random Waypoint model in the range of 30 km × 30 km. The UAV model follows
Table 1 and the camera scan range is given by 2 km × 1 km.
Figure 1b shows the overlapped area for two hours by ten UAVs. As shown in
Figure 1b, UAVs reconnoiter overlapped area frequently (about 40%) for two-hour reconnaissance.
While much recent work has proposed efficient random mobility models for multi-UAV reconnaissance [
12,
13,
14,
15], none of work considers overlapped reconnaissance. Thus, in this paper, we focus on avoiding overlapped reconnaissance by redesigning the existing reconnaissance mobility models. We provide overlap avoidance schemes for well-known random mobility models of multi-UAV reconnaissance. Those models include Random Waypoint, Random Markov Process, Enhanced Gauss–Markov, and Distributed Pheromone Repel models.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}