Electro-Thermal and Aging Lithium-Ion Cell Modelling with Application to Optimal Battery Charging


Abstract
1. Introduction
- the design of a charging strategy that permits fast charging and a minimisation of aging resulting from battery temperature increase and large current magnitude,
- the robustness of the strategy with respect to large dynamic behaviour variations.
2. Cell Modelling
- an electrochemical part,
- a thermal part,
- an aging part.
2.1. Description of the Electrochemical Part of the Model
2.2. Description of the Thermal Part of the Model
2.3. Description of the Aging Part of the Model
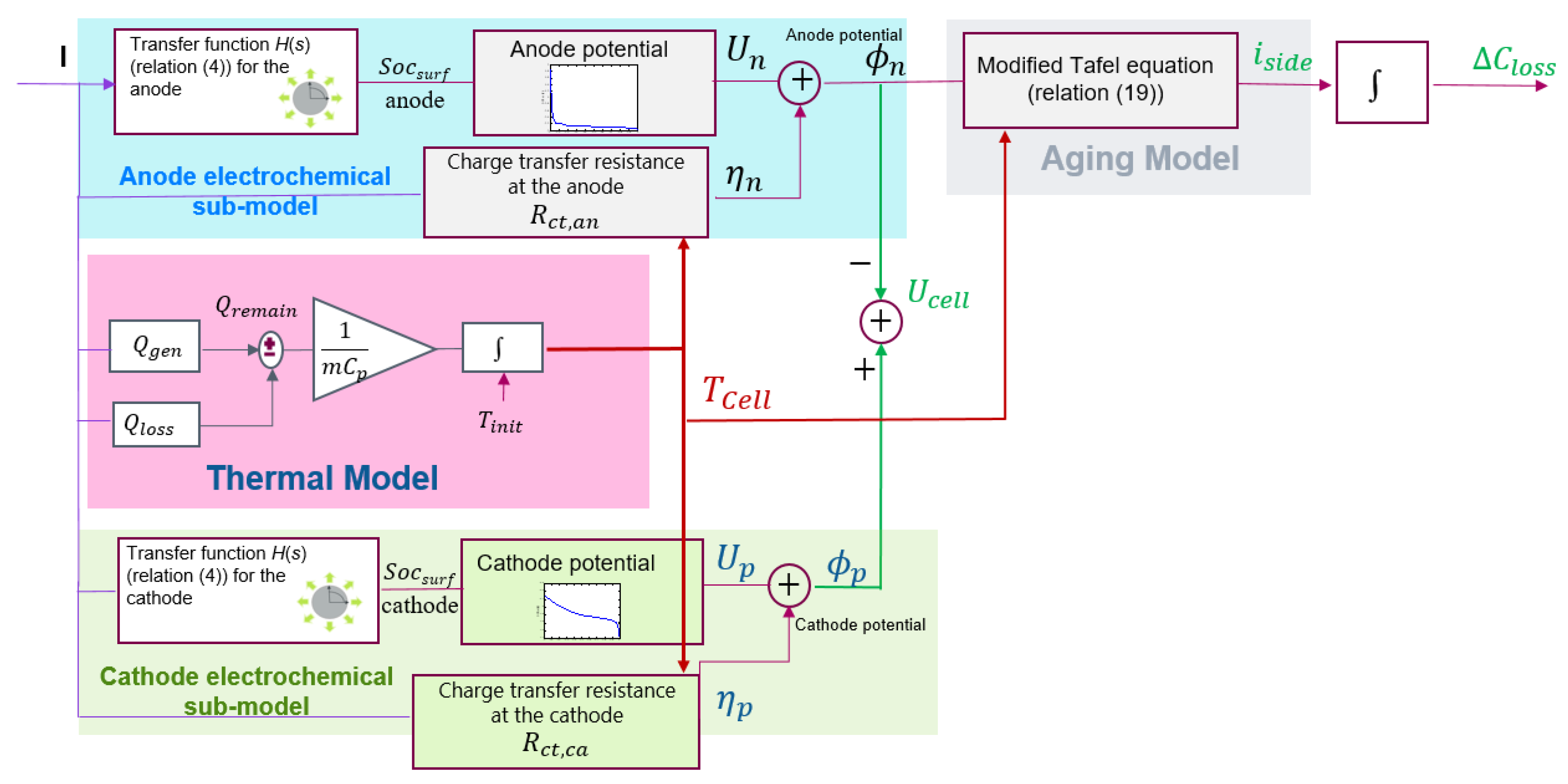
2.4. Whole Cell Model
3. Trajectory Planning
- bounds on the charging current (Ich), in order to avoid exceeding the maximum charge current limits (3.5 C) for safety reasons,
- an increase in the SOC from 5% to 80% (but other ranges of SOC variation can be defined).
4. Cell Model Linearization
4.1. State-Space Model of the Cell Model
4.2. Operating Points Definition
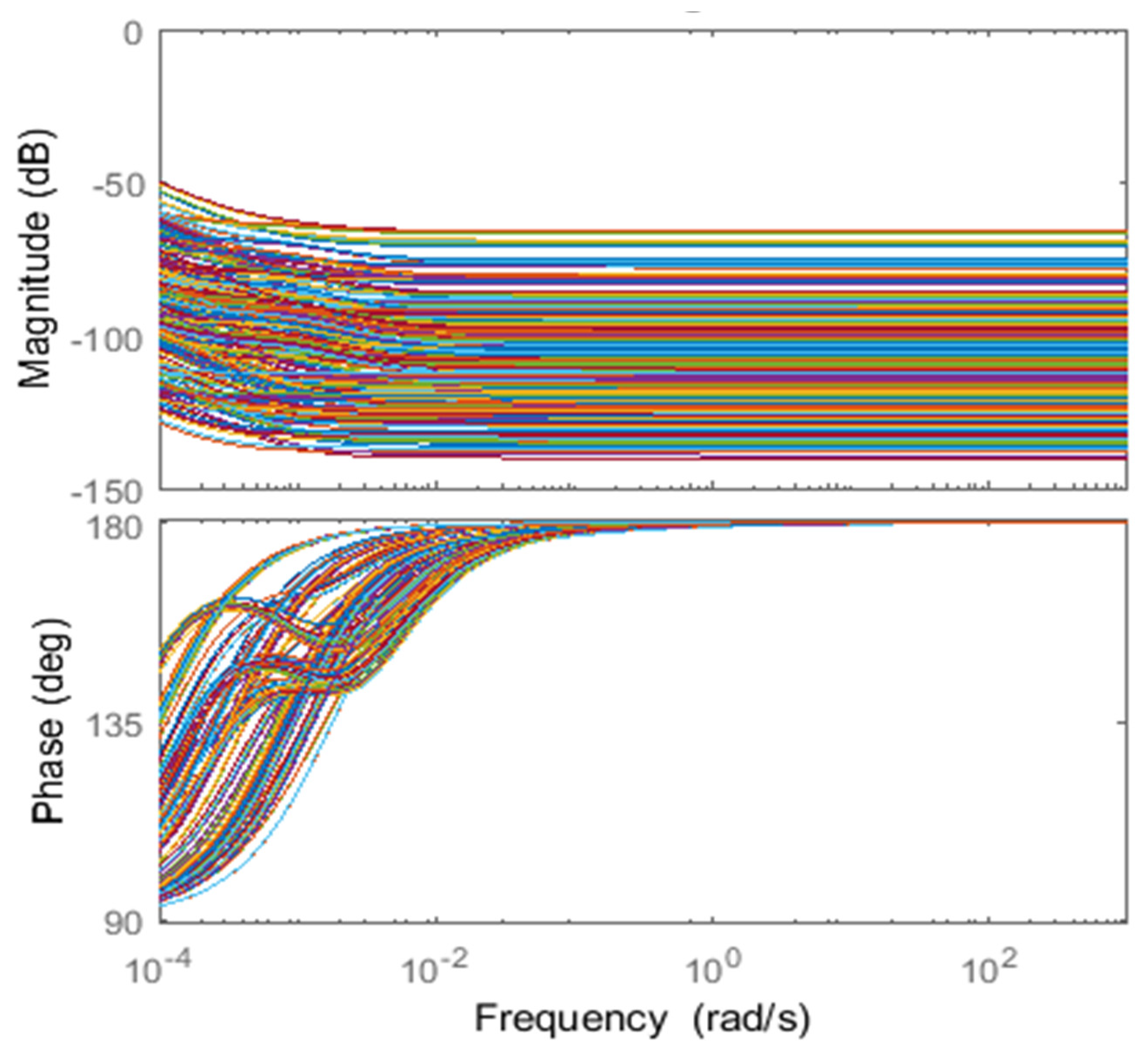
4.3. Uncertain Linear Models Resulting from the Nonlinear Battery Model
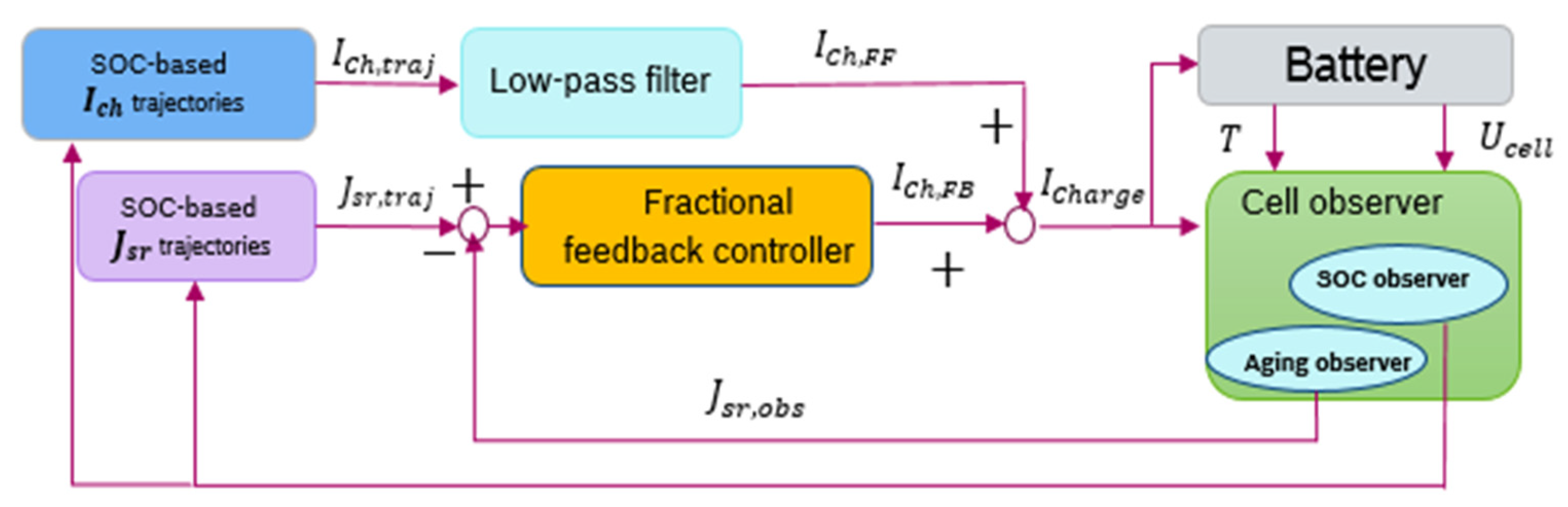
5. Design of the Fast Charging Robust Controller
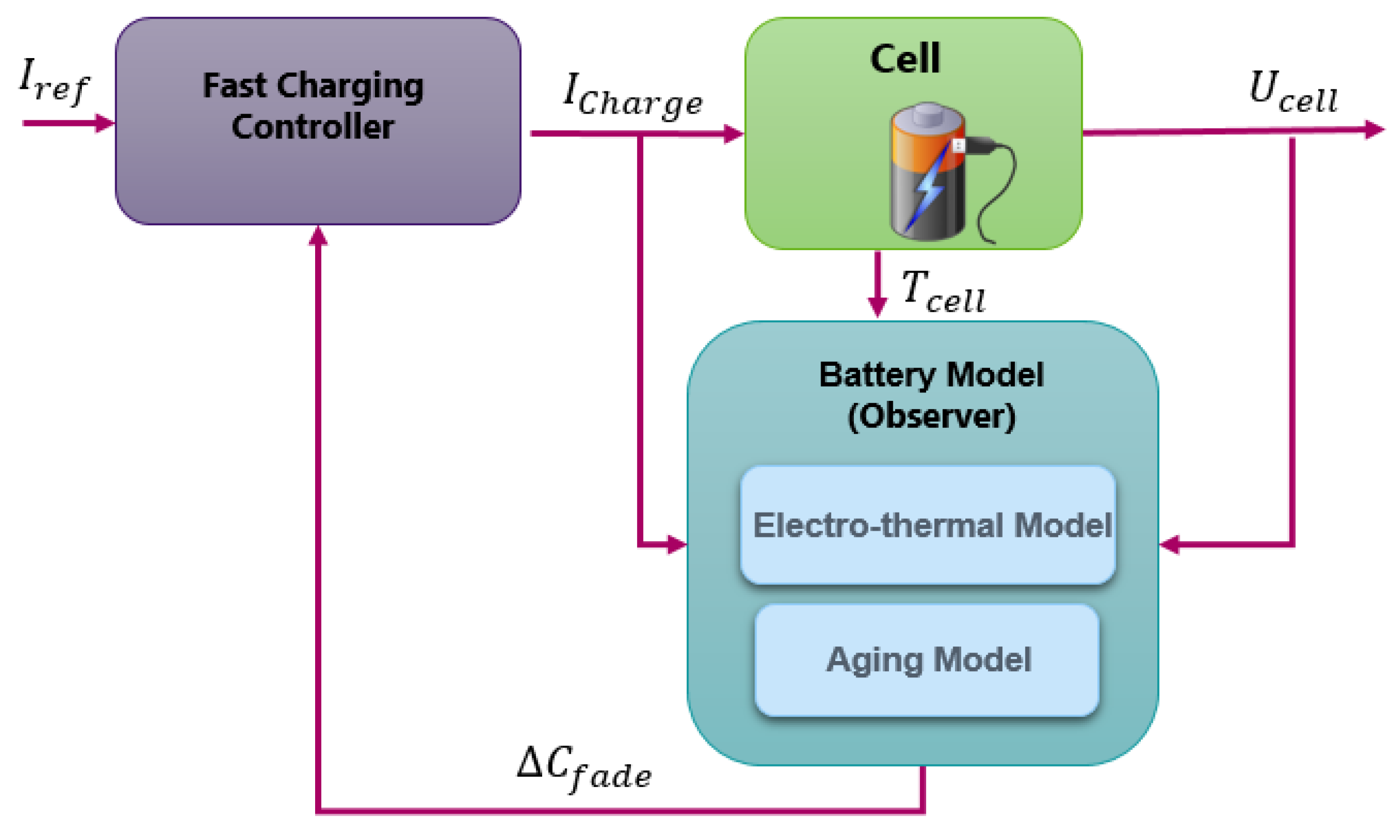
5.1. Closed-Loop Control
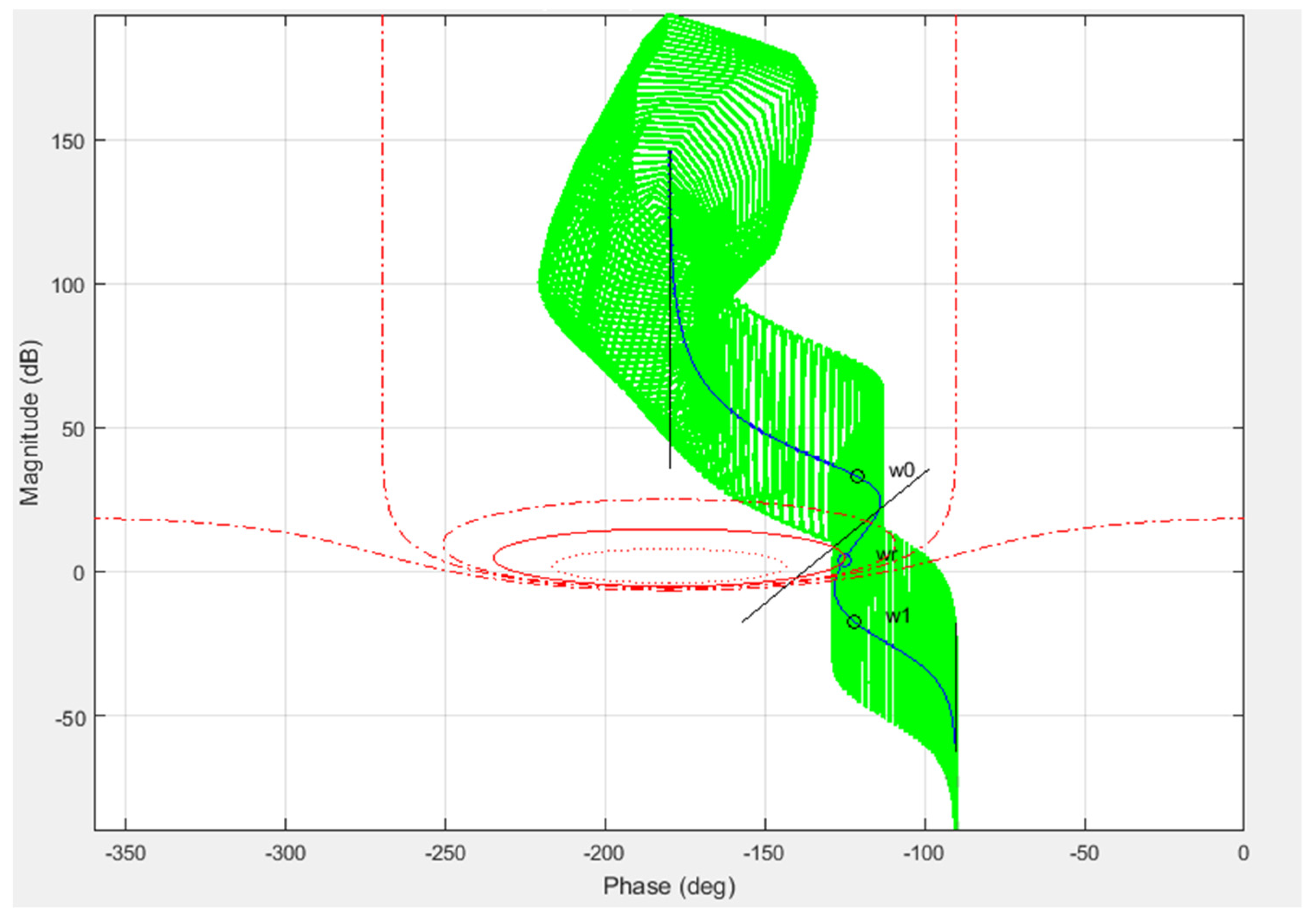
5.2. CRONE Control Methodology for Robust Controller Design
5.3. Design of a CRONE Controller for Fast Charging
- a sensitivity function S(s) resonance peak lower than 6dB to reach a good stability degree;
- a nominal resonance peak of function T(s) equal to 1.7 dB for a small overshoot of the nominal response to a step of the reference signal of ;
- a closed loop bandwidth close to 0.2 rad/s;
- a control effort sensitivity less than 10 A () for a variation of of 10 μA in high-frequency.
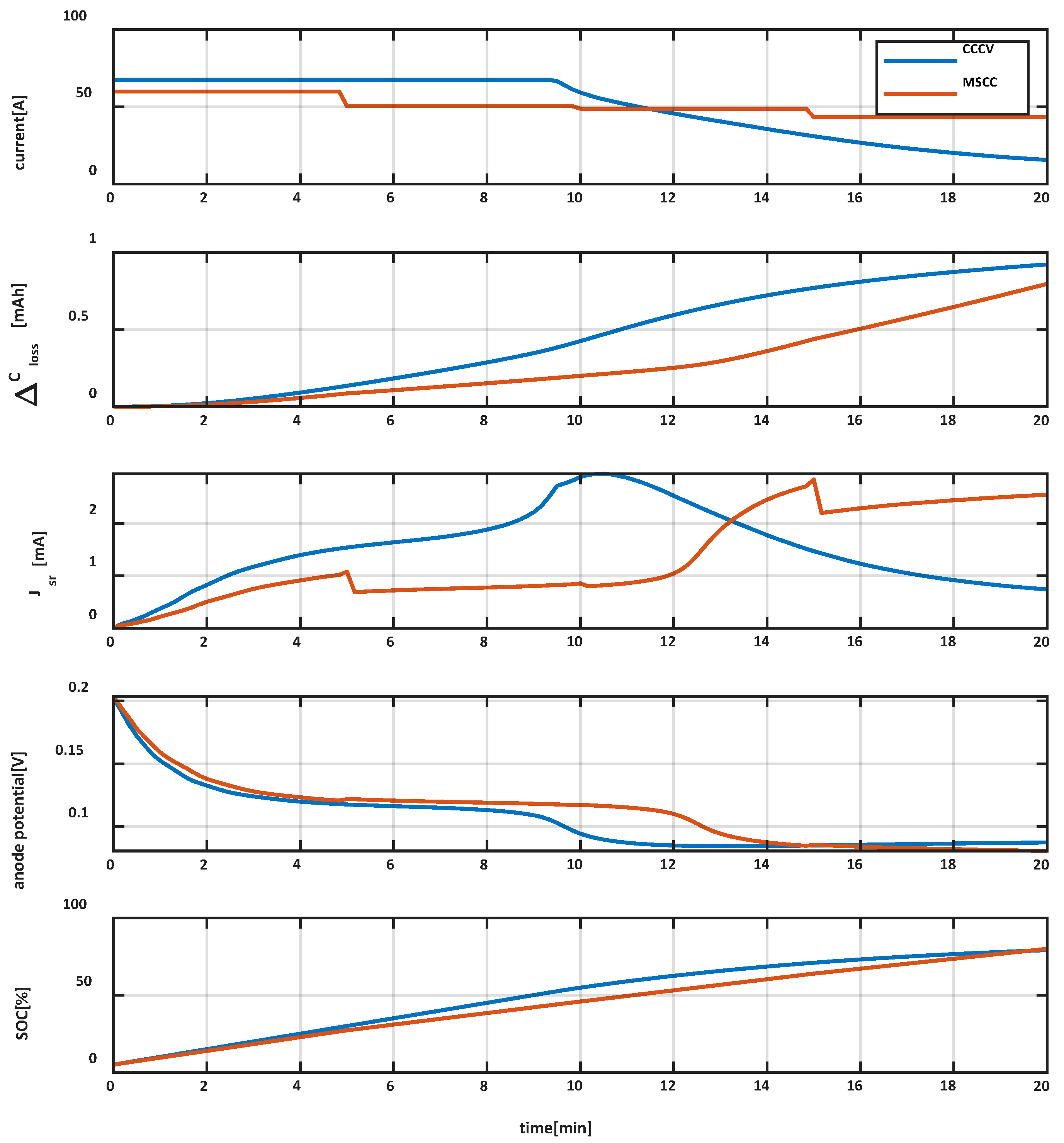
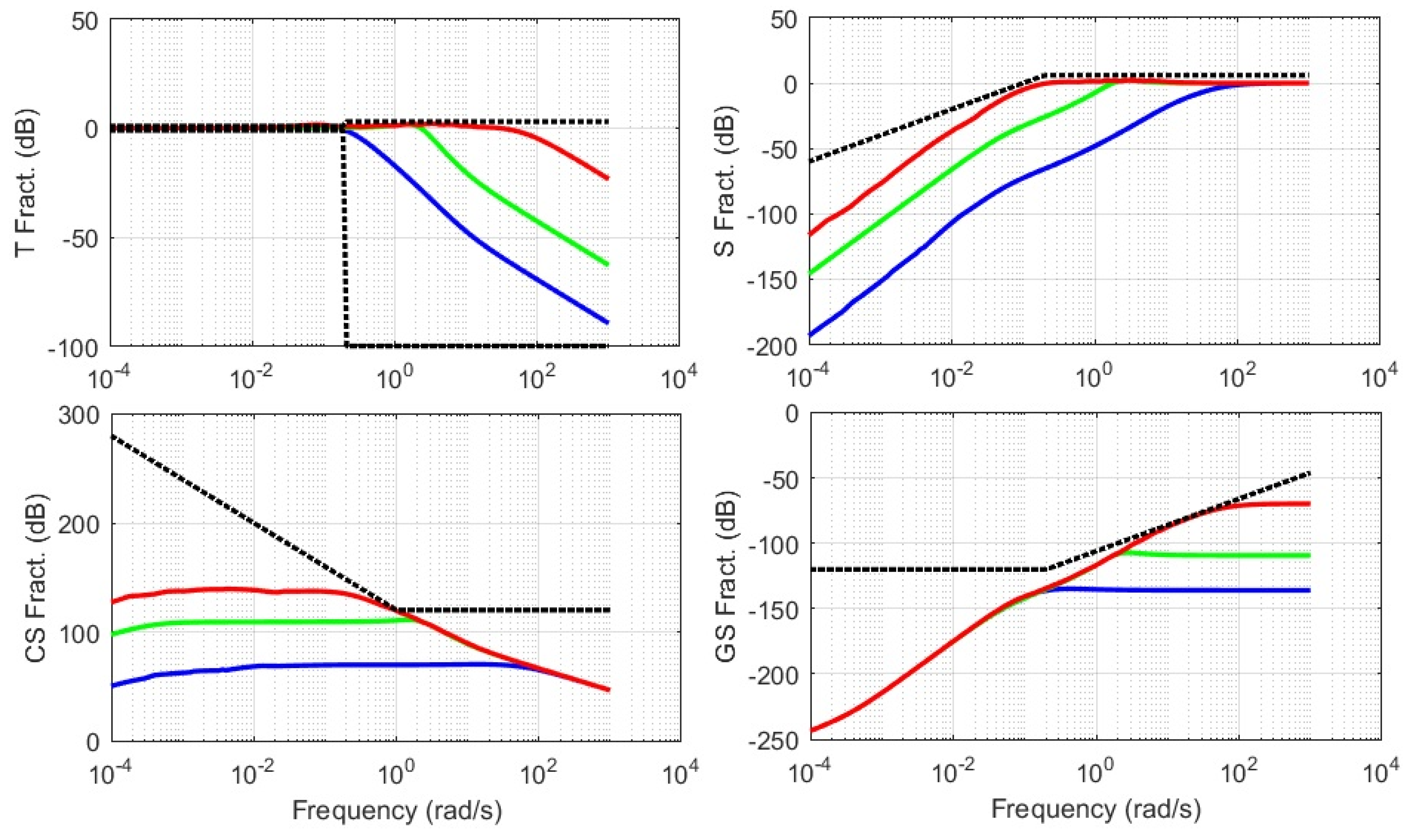
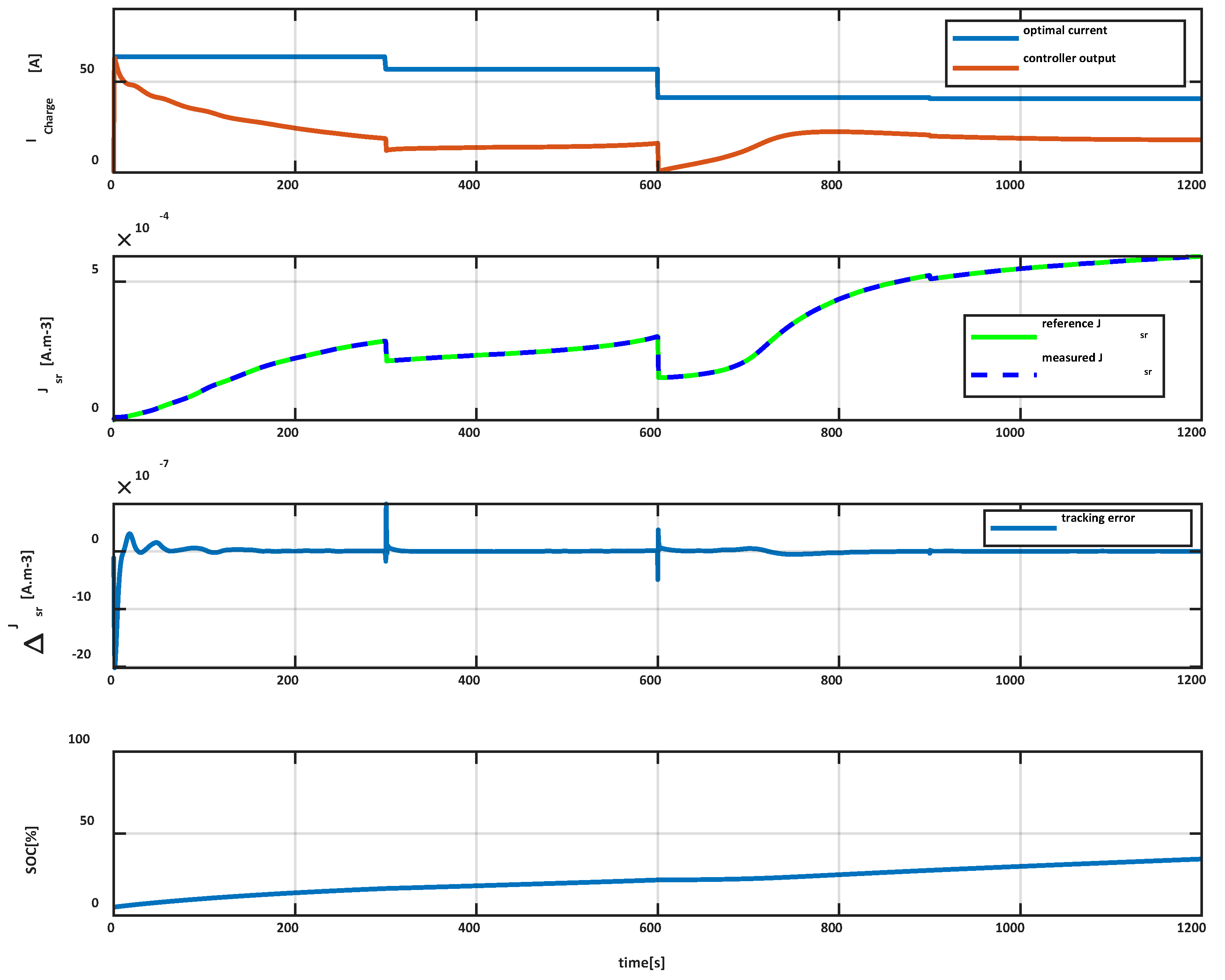
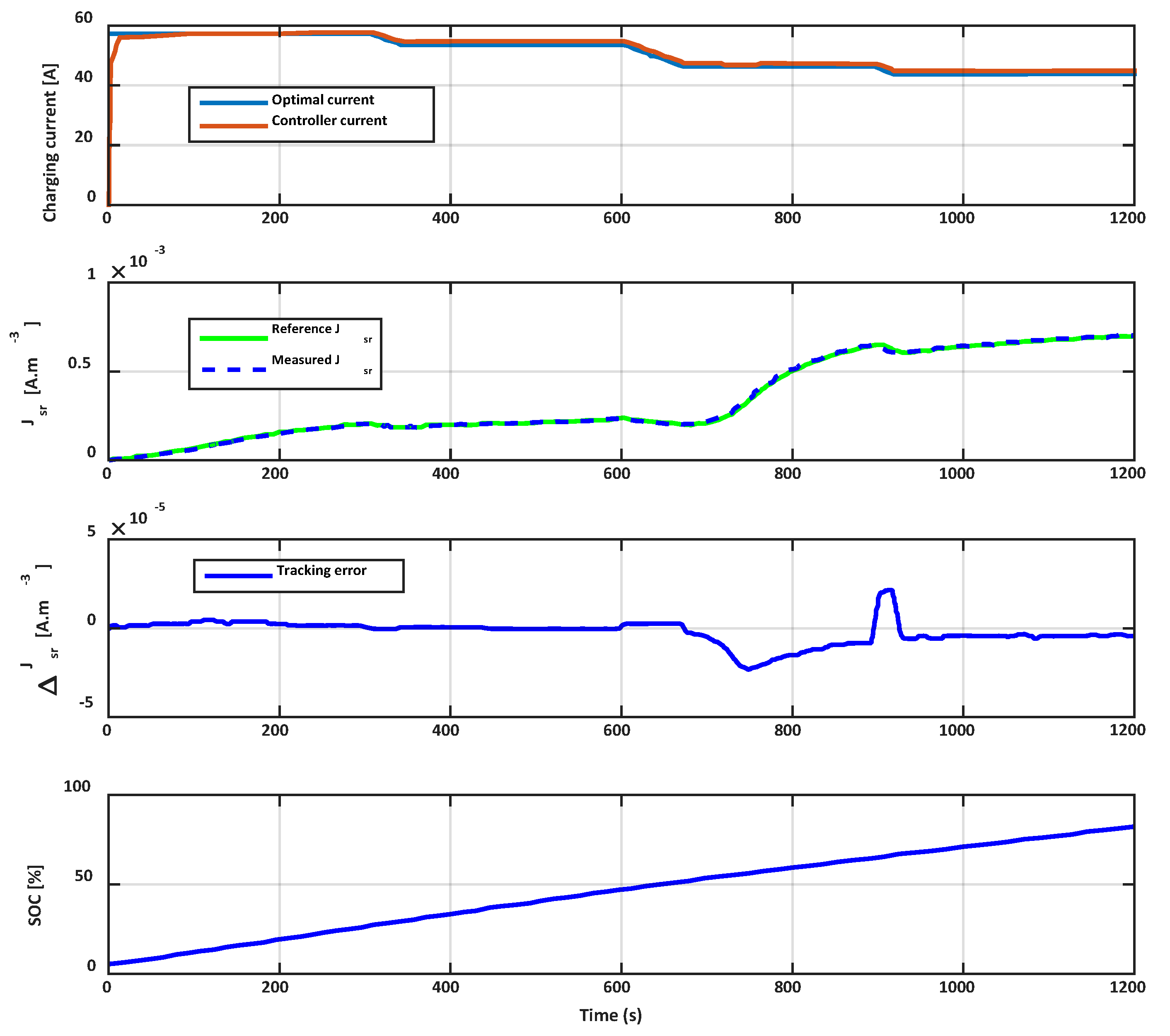
5.4. Analysis of the Control Loop Performance
5.5. Improvement of the Control Strategy
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Botte, G.; Johnson, B.; White, R. Influence of Some Design Variables on the Thermal Behavior of a Lithium-Ion Cell. J. Electrochem. Soc. 2015, 146, 914–923. [Google Scholar] [CrossRef]
- Sabatier, J.; Merveillaut, M.; Francisco, J.; Guillemard, F.; Porcelatto, D. Fractional models for lithium-ion batteries. In Proceedings of the European Control Conference, Zurich, Switzerland, 17–19 July 2013; pp. 3458–3463. [Google Scholar]
- Sabatier, J.; Merveillaut, M.; Francisco, J.; Guillemard, F.; Porcelatto, D. Lithium-ion batteries modeling involving fractional differentiation. J. Power Sources 2014, 262, 36–43. [Google Scholar] [CrossRef]
- Francisco, J.; Sabatier, J.; Lavigne, L.; Guillemard, F.; Moze, M.; Tari, M.; Merveillaut, M.; Noury, A. Lithium-ion battery state of charge estimation using a fractional battery model. In Proceedings of the IEEE International Conference on Fractional Differentiation and its Applications, Catania, Italy, 23–25 June 2014. [Google Scholar]
- Sabatier, J.; Francisco, J.; Guillemard, F.; Lavigne, L.; Moze, M.; Merveillaut, M. Lithium-ion batteries modeling: A simple fractional differentiation based model and its associated parameters estimation method. Signal Process. 2015, 107, 290–301. [Google Scholar] [CrossRef]
- Mohajer, S.; Sabatier, J.; Lanusse, P.; Cois, O. A Fractional-Order Electro-Thermal Aging Model for Lifetime Enhancement of Lithium-ion Batteries. In Proceedings of the MathMod Conference, Vienna, Austria, 21–23 February 2018. [Google Scholar]
- Vo, T.T.; Chen, X.; Shen, W.; Kapoor, A. New charging strategy for lithium-ion batteries based on the integration of Taguchi method and state of charge estimation. J. Power Sources 2015, 273, 413–422. [Google Scholar] [CrossRef]
- Abdollahi, A.; Han, X.; Avvari, G.V.; Raghunathan, N.; Balasingam, B.; Pattipati, K.R.; Bar-Shalom, Y. Optimal battery charging, Part I: Minimizing time-to-charge, energy loss, and temperature rise for OCV-resistance battery model. J. Power Sources 2016, 303, 388–398. [Google Scholar] [CrossRef]
- Perez, H.E.; Hu, X.; Dey, S.; Moura, S.J. Optimal Charging of Li-Ion Batteries with Coupled Electro-Thermal-Aging Dynamics. IEEE Trans. Veh. Technol. 2017, 66, 7761–7770. [Google Scholar] [CrossRef]
- Choe, S.-Y.; Li, X.; Xiao, M. Fast charging method based on estimation of ion concentrations using a reduced order of Electrochemical Thermal Model for lithium ion polymer battery. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–11. [Google Scholar]
- Jie Cai, J.; Zhang, H.; Jin, X. Aging-aware predictive control of PV-battery assets in buildings. Appl. Energy 2019, 236, 478–488. [Google Scholar]
- Torchio, M.; Magni, L.; Braatz, R.D.; Raimondo, D.M. Optimal Health-aware Charging Protocol for Lithium-ion Batteries: A Fast Model Predictive Control Approach. IFAC-PapersOnLine 2016, 49, 827–832. [Google Scholar] [CrossRef]
- Romero, A.; Goldar, A.; Garone, E. A Model Predictive Control Application for a Constrained Fast Charge of Lithium-ion Batteries. In Proceedings of the 13th International Modelica Conference, Regensburg, Germany, 4–6 March 2019. [Google Scholar]
- Zou, C.; Manzie, C.; Nešić, D. Model Predictive Control for Lithium-Ion Battery Optimal Charging. IEEE/ASME Trans. Mechatron. 2018, 23, 947–957. [Google Scholar] [CrossRef]
- Klein, R.; Chaturvedi, N.A.; Christensen, J.; Ahmed, J.; Findeisen, R.; Kojic, A. Optimal charging strategies in lithium-ion battery. In Proceedings of the American Control Conference (ACC), San Francisco, CA, USA, 29 June–1 July 2011. [Google Scholar]
- Yan, J.; Xu, G.; Qian, H.; Xu, Y.; Song, Z. Model Predictive Control-Based Fast Charging for Vehicular Batteries. Energies 2011, 4, 1178–1196. [Google Scholar] [CrossRef]
- Cheng, M.; Chen, B. Nonlinear Model Predictive Control of a Power-Split Hybrid Electric Vehicle with Consideration of Battery Aging. ASME J. Dyn. Syst. Meas. Control 2019, 141, 081008. [Google Scholar] [CrossRef]
- Kandler, A.S.; Rahn, D.C.; Wang, C. Control oriented ID electrochemical model of lithium ion battery. IEEE Trans. Control Syst. Technol. 2010, 18, 2565–2578. [Google Scholar]
- Smith Kandler, A. Electrochemical Modeling, Estimation and Control of Lithium-ion Batteries. Ph.D. Thesis, Pennsylvania University, Philadelphia, PA, USA, 2006. [Google Scholar]
- Newman, J.; Thomas-Alyea, K.E. Electrochemical Systems, 3rd ed.; Wiley: Hoboken, NJ, USA, 2004. [Google Scholar]
- Shabani, B.; Biju, M. Theoretical Modelling Methods for Thermal Management of Batteries. Energies 2015, 8, 10153–10177. [Google Scholar] [CrossRef]
- Ramadass, P.; Haran, B.; Gomadam, P.; White, R.; Popov, B. Development of First Principles Capacity Fade Model for Li-Ion Cells. J. Electrochem. Soc. 2004, 151, A196. [Google Scholar] [CrossRef]
- Randall, A.; Perkins, R.; Zhang, X.; Plett, G. Controls oriented reduced order modeling of solid-electrolyte interphase layer growth. J. Power Sources 2012, 209, 282–288. [Google Scholar] [CrossRef]
- Guan, P.; Liu, L.; Lin, X. Simulation and Experiment on Solid Electrolyte Interphase (SEI) Morphology Evolution and Lithium-Ion Diffusion. J. Electrochem. Soc. 2015, 162, A1798–A1808. [Google Scholar] [CrossRef]
- Ikeya, T.; Sawada, N.; Murakami, J.I.; Kobayashi, K.; Hattori, M.; Murotani, N.; Ujiie, S.; Kajiyama, K.; Nasu, H.; Narisoko, H.; et al. Multi-step constant-current charging method for an electric vehicle nickel/metal hydride battery with high-energy efficiency and long cycle life. J. Power Sources 2002, 105, 6–12. [Google Scholar] [CrossRef]
- Sabatier, J.; Lanusse, P.; Melchior, P.; Oustaloup, A. Fractional order differentiation and robust control design. In CRONE, H-Infinity and Motion Control, Intelligent Systems, Control and Automation: Science and Engineering; Springer: Dordrecht, The Netherlands, 2015; Volume 77, pp. 2213–8986. [Google Scholar]
- Lanusse, P. CRONE Control System Design, a CRONE Toolbox for Matlab. 2010. Available online: http://www.imsbordeaux.fr/CRONE/toolbox (accessed on 1 June 2017).
- Oustaloup, A.; Melchior, P.; Lanusse, P.; Cois, O.; Dancla, F. The CRONE toolbox for Matlab. In Proceedings of the 11th IEEE International Symposium on Computer-Aided Control System Design, CACSD, Anchorage, AK, USA, 25–27 September 2000; pp. 190–195. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Unit |
|---|---|---|
| Mass of the cell | kg | |
| Specific heat capacity | J·kg−1·K−1 | |
| Polarization voltage | V | |
| High frequency resistance | Ω | |
| I | Input current | A |
| Heat transfer coefficient | W·m−2·K | |
| Cell surface area | m2 | |
| Ambient temperature | K |
| Symbol | Parameter | Unit |
|---|---|---|
| Specific surface area | m−1 | |
| Exchange current density | A·m−2 | |
| Symmetry factor | - | |
| n | Number of transferred electrons | - |
| Activation Energy | kJ·mol−1 | |
| SEI layer thickness | m | |
| Molar mass of SEI layer | kg·mol−1 | |
| Density of SEI layer | kg·m−3 | |
| SEI layer conductivity | S·m−1 | |
| Initial resistance of SEI layer | Ω·m2 | |
| Resistance of side reaction product | Ω·m2 | |
| Charging current | A |
| Symbol | Parameter | Unit |
|---|---|---|
| Capacity loss | mAh | |
| Thickness of SEI layer | m | |
| Electrode average concentration | Ah | |
| Electrode partial concentration | Ah | |
| Battery terminal voltage | V | |
| Anode potential | V | |
| Open Circuit Voltage | V |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohajer, S.; Sabatier, J.; Lanusse, P.; Cois, O. Electro-Thermal and Aging Lithium-Ion Cell Modelling with Application to Optimal Battery Charging. Appl. Sci. 2020, 10, 4038. https://doi.org/10.3390/app10114038
Mohajer S, Sabatier J, Lanusse P, Cois O. Electro-Thermal and Aging Lithium-Ion Cell Modelling with Application to Optimal Battery Charging. Applied Sciences. 2020; 10(11):4038. https://doi.org/10.3390/app10114038
Chicago/Turabian StyleMohajer, Sara, Jocelyn Sabatier, Patrick Lanusse, and Olivier Cois. 2020. "Electro-Thermal and Aging Lithium-Ion Cell Modelling with Application to Optimal Battery Charging" Applied Sciences 10, no. 11: 4038. https://doi.org/10.3390/app10114038
APA StyleMohajer, S., Sabatier, J., Lanusse, P., & Cois, O. (2020). Electro-Thermal and Aging Lithium-Ion Cell Modelling with Application to Optimal Battery Charging. Applied Sciences, 10(11), 4038. https://doi.org/10.3390/app10114038