Robust Space Time Adaptive Processing Methods for Synthetic Aperture Radar


Abstract
1. Introduction
2. SAR Simulation Models
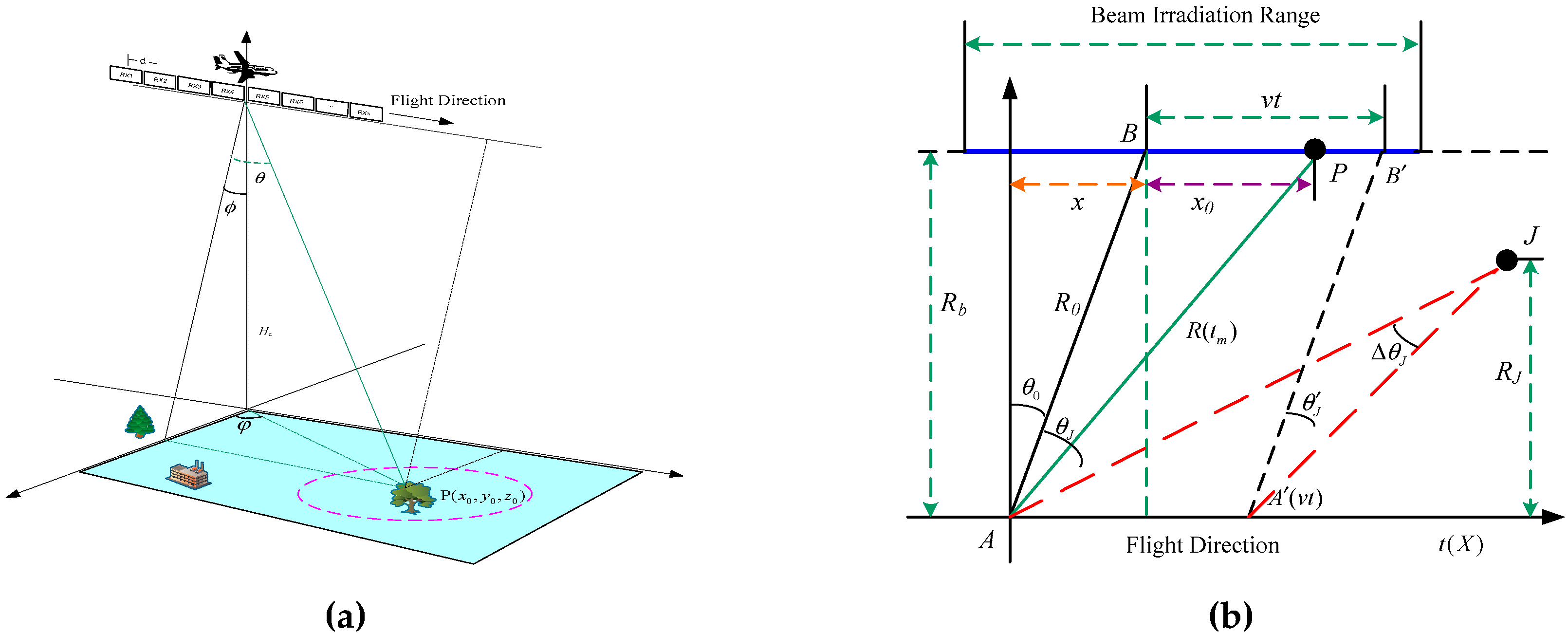
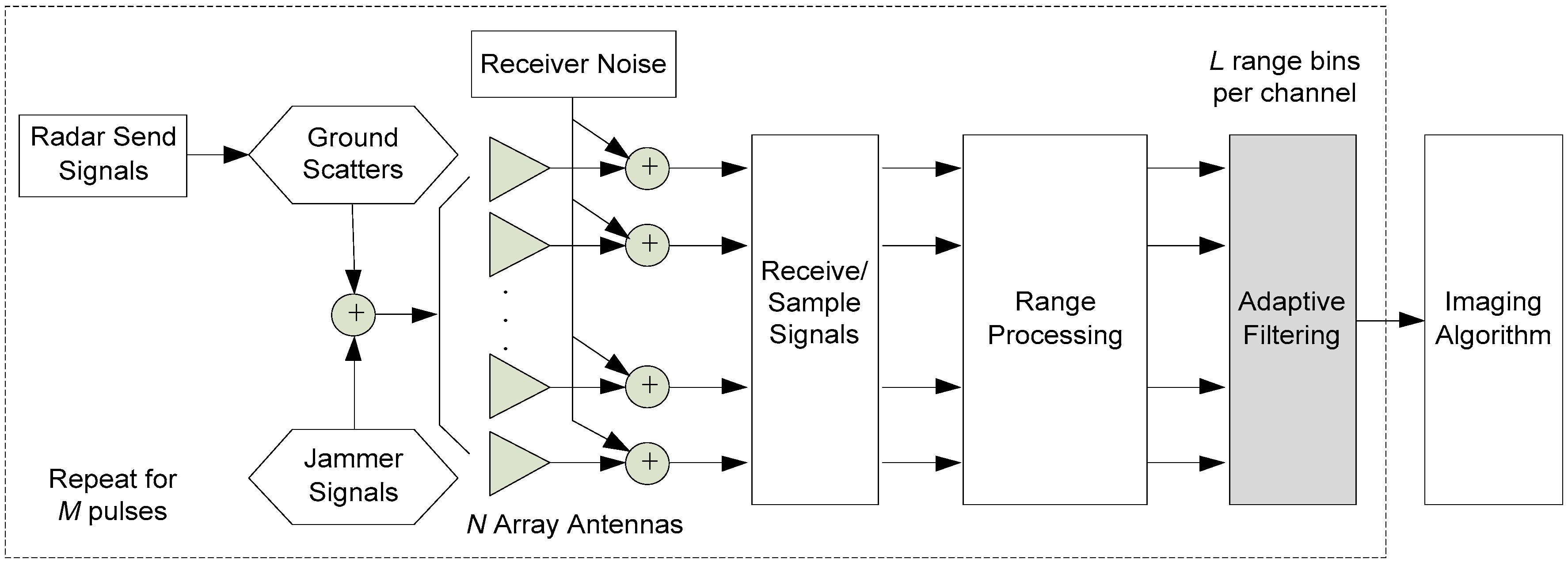
2.1. SAR Signal Model
2.2. Jammer and Noise Models
2.3. Basic STAP Method
2.4. Influence of Platform Motion
3. The Piecewise Constrained STAP Based on Sub-Apertures Framework
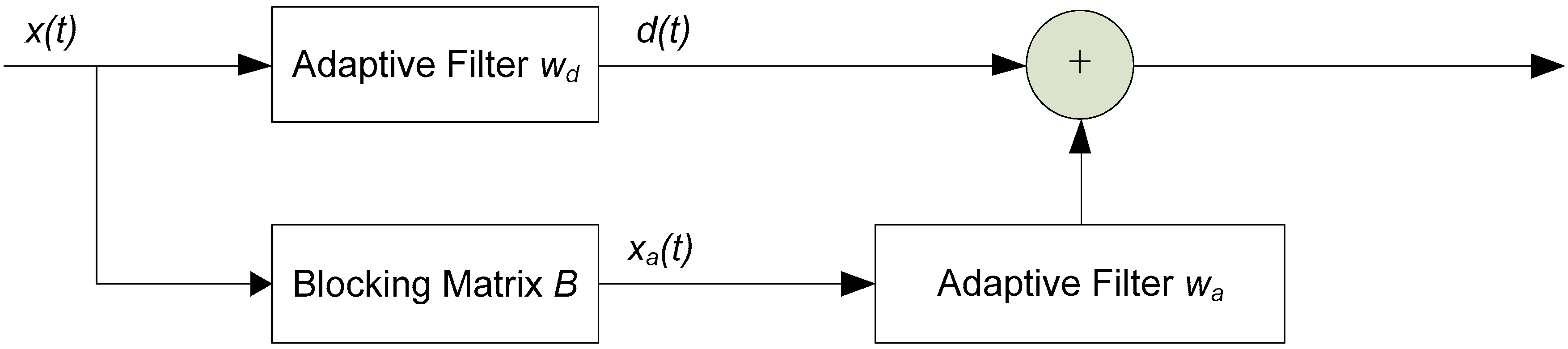
4. The Piecewise Constrained Generalized Sidelobe Canceller
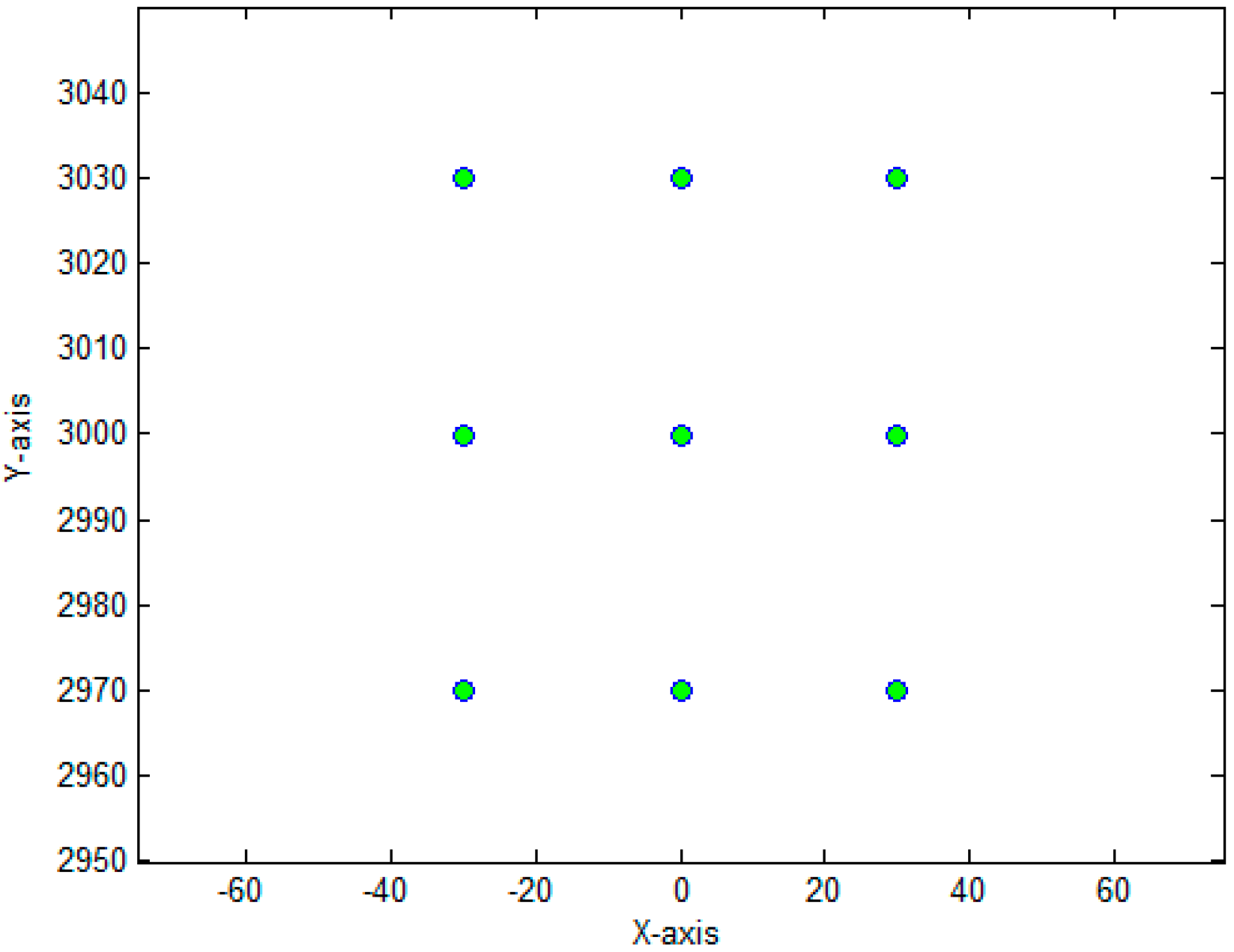
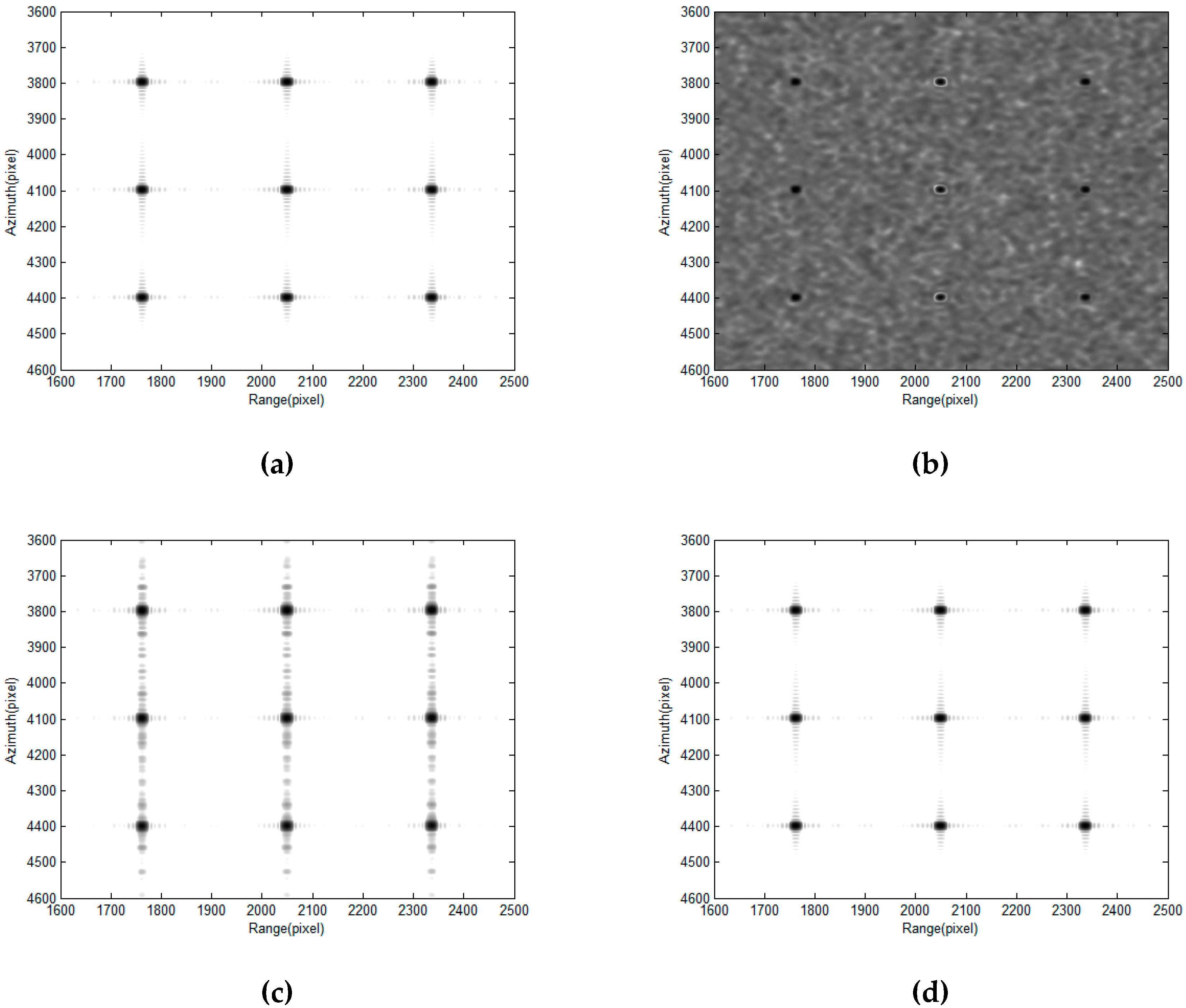
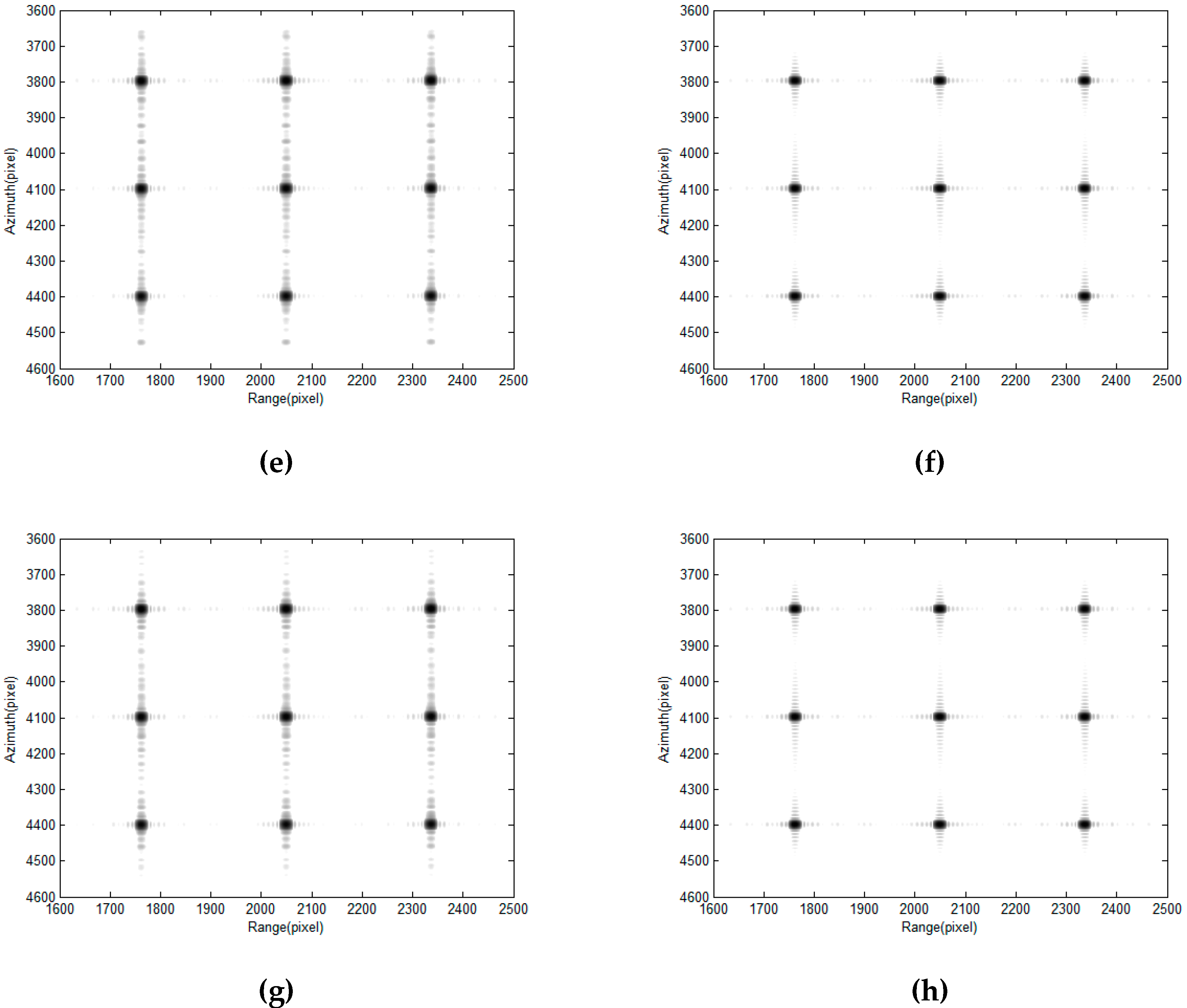
5. Simulation Result
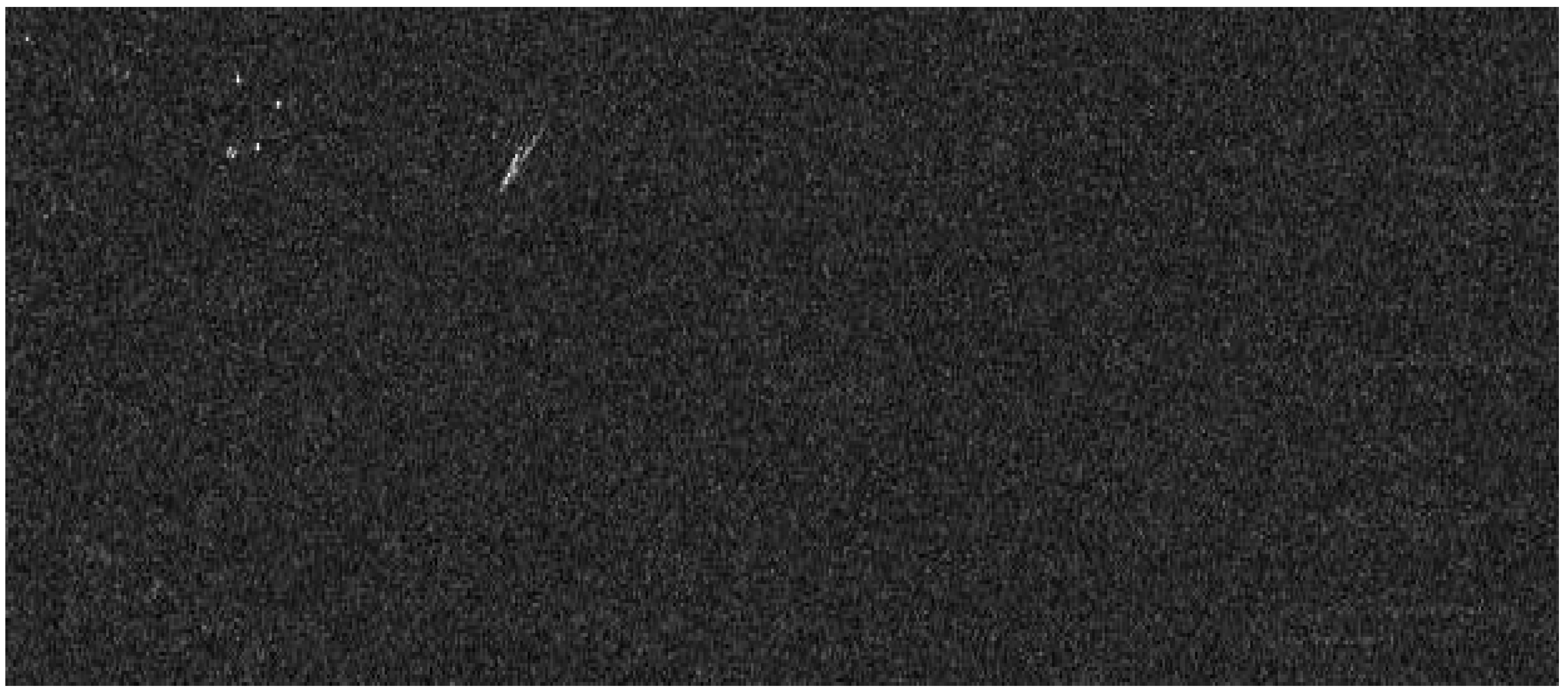
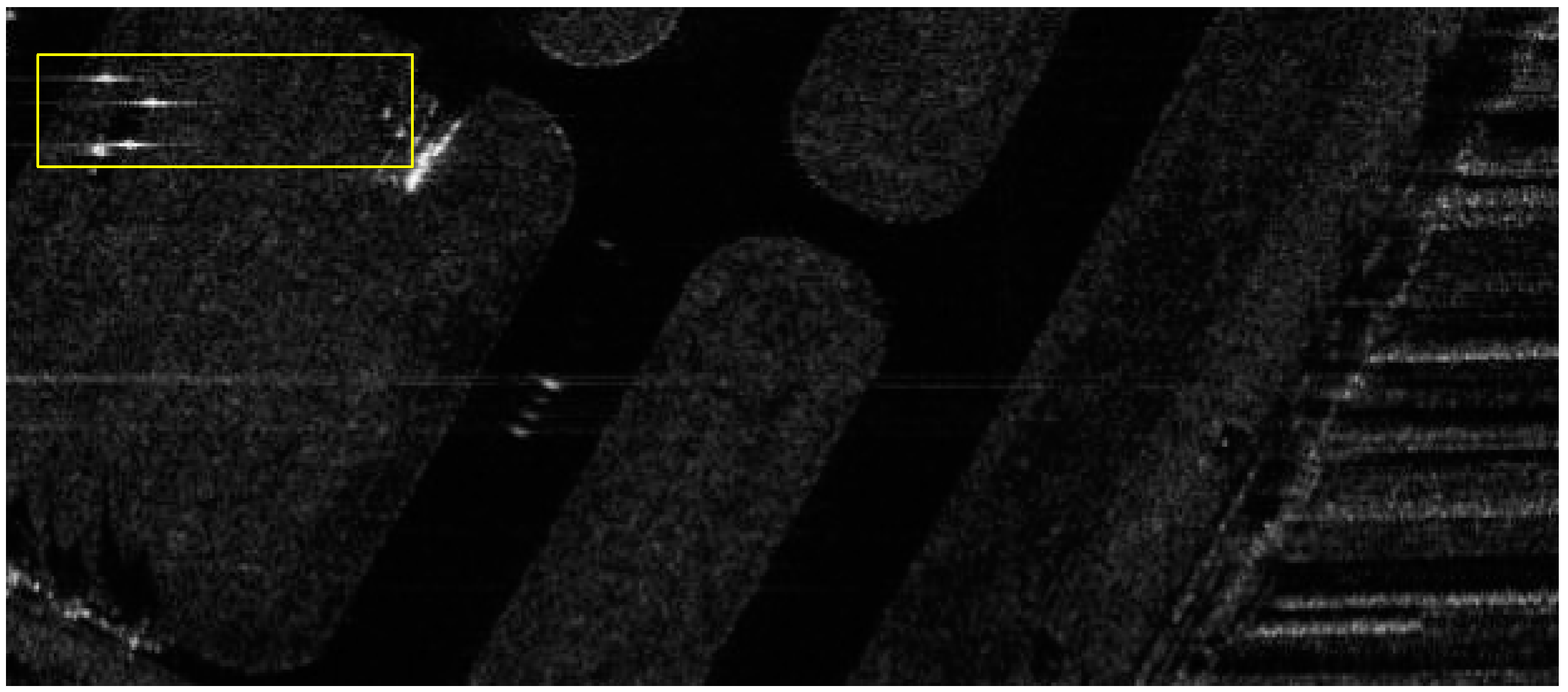
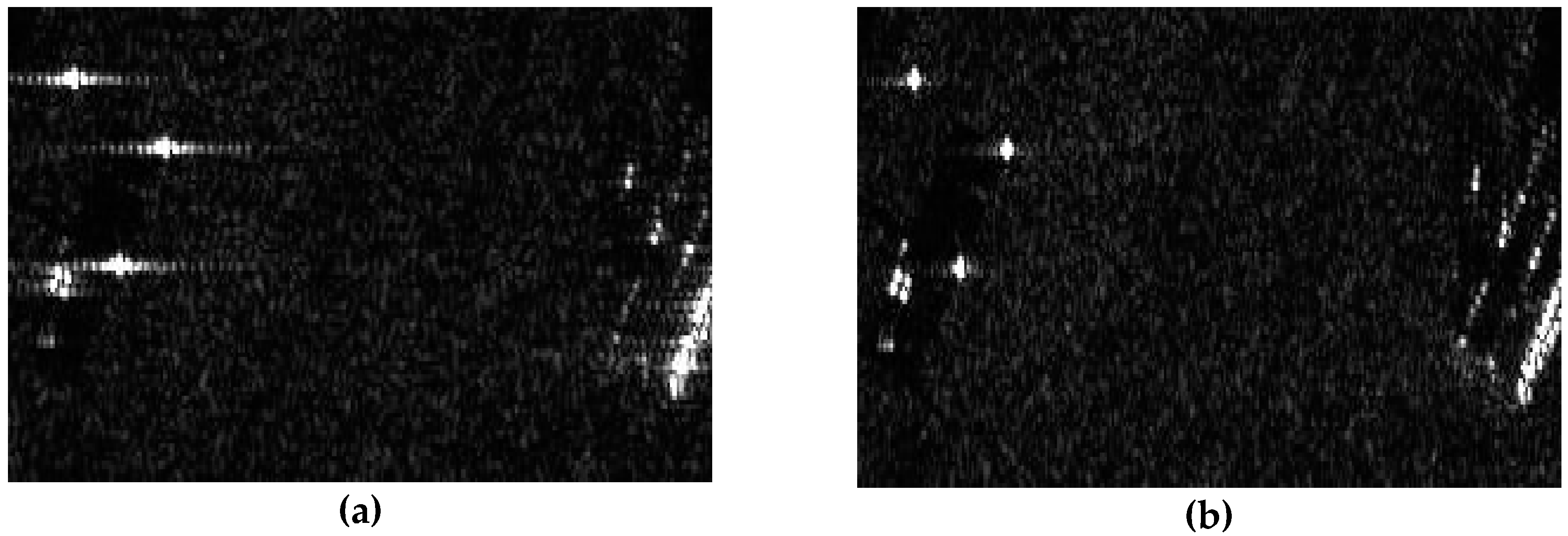
6. Measured Data Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, C. Synthetic Aperture Radar Principle, System Analysis and Application; Science Press: Beijing, China, 1989. [Google Scholar]
- Liu, J.; Qiu, X.; Han, B.; Xiao, D. Study on geo-location of sliding spotlight mode of GF-3 satellite. In Proceedings of the 5th IEEE Asia-Pacific Conference on Synthetic Aperture Radar, APSAR, Singapore, 1–4 September 2015. [Google Scholar]
- Mittermayer, J.; Lord, R.; Borner, E. Sliding spotlight SAR processing for TerraSAR-X using a new formulation of the extended chirp scaling algorithm. In Proceedings of the IGARSS 2003 Proceedings, Toulouse, France, 21–25 July 2003; pp. 1462–1464. [Google Scholar]
- Dumper, K.; Cooper, P.S.; Wons, A.F. Spaceborne synthetic aperture radar and noise jamming. In Proceedings of the IEE Radar Systems, Edinburgh, UK, 14–16 October 1997; pp. 411–414. [Google Scholar]
- Zhao, B.; Zhou, F.; Tao, M.; Zhang, Z. Improved method for synthetic aperture radar scattered wave deception jamming. IET Radar Sonar Navig. 2014, 9, 155–160. [Google Scholar] [CrossRef]
- Wang, W.; Cai, J. A technique for jamming bi-and multistatic SAR systems. IEEE Geosci. Remote Sens. Lett. 2007, 4, 80–82. [Google Scholar] [CrossRef]
- Li, W.; Liang, D.; Dong, Z. A new jamming method on parasitic spaceborne SAR system. In Proceedings of the IGARSS 2005 Proceedings, Seoul, Korea, 29 July 2005; pp. 4611–4614. [Google Scholar]
- Smith, T.L.; Hill, R.D.; Hayward, S.D.; Yates, G. Filtering approaches for interference suppression in low frequency SAR. IEE Proc. Radar Sonar Navig. 2006, 153, 338–344. [Google Scholar] [CrossRef]
- Miller, T.; Potter, L.; McCorkle, J. RFI suppression for ultra wide band radar. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 1142–1156. [Google Scholar] [CrossRef]
- Zhou, F.; Xing, M.; Bai, X.; Sun, G. Narrow Band interference suppression for SAR based on complex empirical mode decomposition. IEEE Geosci. Remote Sens. Lett. 2009, 6, 423–427. [Google Scholar] [CrossRef]
- Nguyen, L.; Tuan, T.; Wong, D.; Soumekh, M. Adaptive coherent suppression of multiple wide band width RFI sources in SAR. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XI, Orlando, FL, USA, 12–15 April 2004; Volume 5427, pp. 1–16. [Google Scholar]
- Lord, R.T.; Inggs, M.R. Efficient RFI suppression in SAR using LMS adaptive filter integrated with range/Doppler algorithm. Electron. Lett. 1999, 35, 629–630. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, R.; Xing, M.; Bao, Z. Eigen subspace based filtering with application in narrow band interference suppression for SAR. IEEE Geosci. Remote Sens. Lett. 2007, 4, 75–79. [Google Scholar] [CrossRef]
- Zhou, F.; Tao, M. Research on Methods for Narrow-Band Interference Suppression in Synthetic Aperture Radar Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3476–3485. [Google Scholar] [CrossRef]
- Rosenberg, L.; Gray, D.A. Constrained fast-time STAP techniques for interference suppression in multichannel SAR. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1792–1805. [Google Scholar] [CrossRef]
- Ender, J.H.G. Space-time adaptive processing for synthetic aperture radar. In Proceedings of the IEE Colloquium on Space-Time Adaptive Processing, London, UK, 6 April 1998; pp. 1–8. [Google Scholar]
- Rosenberg, L.; Gray, D.A. Anti-jamming techniques for multichannel SAR imaging. IEE Proc.–Radar Sonar Navig. 2006, 153, 234–242. [Google Scholar] [CrossRef]
- Guerci, J.R. Space-Time Adaptive Processing for Radar; Artech House: Norwood, MA, USA, 2003. [Google Scholar]
- Titi, G.W.; Marshall, D.F. The ARPA/NAVY Mountaintop Program: Adaptive signal processing for airborne early warning radar. In Proceedings of the 1996 IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP-96), Atlanta, GA, USA, 9 May 1996; pp. 1165–1168. [Google Scholar]
- Bacci, A.; Martorella, M.; Gray, D.A.; Berizzi, F. Space-Doppler adaptive processing for radar imaging of moving targets masked by ground clutter. IET Radar Sonar Navig. 2015, 9, 712–726. [Google Scholar] [CrossRef]
- Bacci, A.; Martorella, M.; Gray, D.A.; Gelli, S.; Berizzi, F. Virtual multichannel SAR for ground moving target imaging. IET Radar Sonar Navig. 2016, 10, 50–62. [Google Scholar] [CrossRef]
- Su, H.; Liu, H.; Shui, P.; Bao, Z. Adaptive Beamforming for Nonstationary HF Interference Cancellation in Skywave Over-the-Horizon Radar. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 312–324. [Google Scholar] [CrossRef]
- Fabrizio, G.A.; Gershman, A.B. Robust adaptive beamforming for HF surface wave over the horizon radar. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 510–525. [Google Scholar] [CrossRef]
- Su, H. Adaptive HF interference cancellation for skywave over-the-horizon radar. Electron. Lett. 2011, 47, 50–52. [Google Scholar] [CrossRef]
- Klemm, R. Space Time Adaptive Processing: Principles and Applications; IEE Press: London, UK, 1998. [Google Scholar]
- Melvin, W.L. A STAP overview. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 19–35. [Google Scholar] [CrossRef]
- Reed, S.; Mallett, J.D.; Brennan, L.E. Rapid Convergence Rate in Adaptive Arrays. IEEE Trans. Aerosp. Electron. Syst. 2004, 10, 853–863. [Google Scholar] [CrossRef]
- Buckley, K.; Griffiths, L.J. An adaptive generalized sidelobe canceller with derivative constraints. IEEE Trans. Antennas Propag. 1986, 34, 311–319. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Carrier frequency (fc) | 10 GHz |
| Bandwidth (B) | 200 MHz |
| Number of pulses (M) | 1024 / 512 |
| Range bins (Mr) | 2048 |
| Number of receive channel (N) | 16 |
| Element spacing | 0.5 λ |
| Range resolution | 1 m |
| Azimuth resolution | 1 m |
| Velocity (vc) | 150 m/s |
| Height of platform (Hc) | 3000 m |
| SAR Squint angle (θ0) | 15° |
| Range center | 40 km |
| Jammer offset/ Direction of jammer(θJ) | 35 km/ 10° |
| Jam noise ratio/Signal noise ratio | 20 dB/ 15 dB |
| Theoretical Azimuth Resolution | 1.19 m | ||
|---|---|---|---|
| Item | Number of Sub-Apertures | Conventional Method | Proposed Method |
| Simulation Azimuth Resolution | M = 16 | 1.48 m | 1.27 m |
| M = 32 | 1.49 m | 1.27 m | |
| M = 64 | 1.47 m | 1.27 m | |
| Simulation Azimuth PSLR/ISLR | M = 16 | −21.9 dB / −16.4 dB | −25.2 dB / −22.3 dB |
| M = 32 | −22.2 dB / −17.7 dB | −25.2 dB / −22.3 dB | |
| M = 64 | −22.8 dB / −17.9 dB | −25.2 dB / −22.3 dB | |
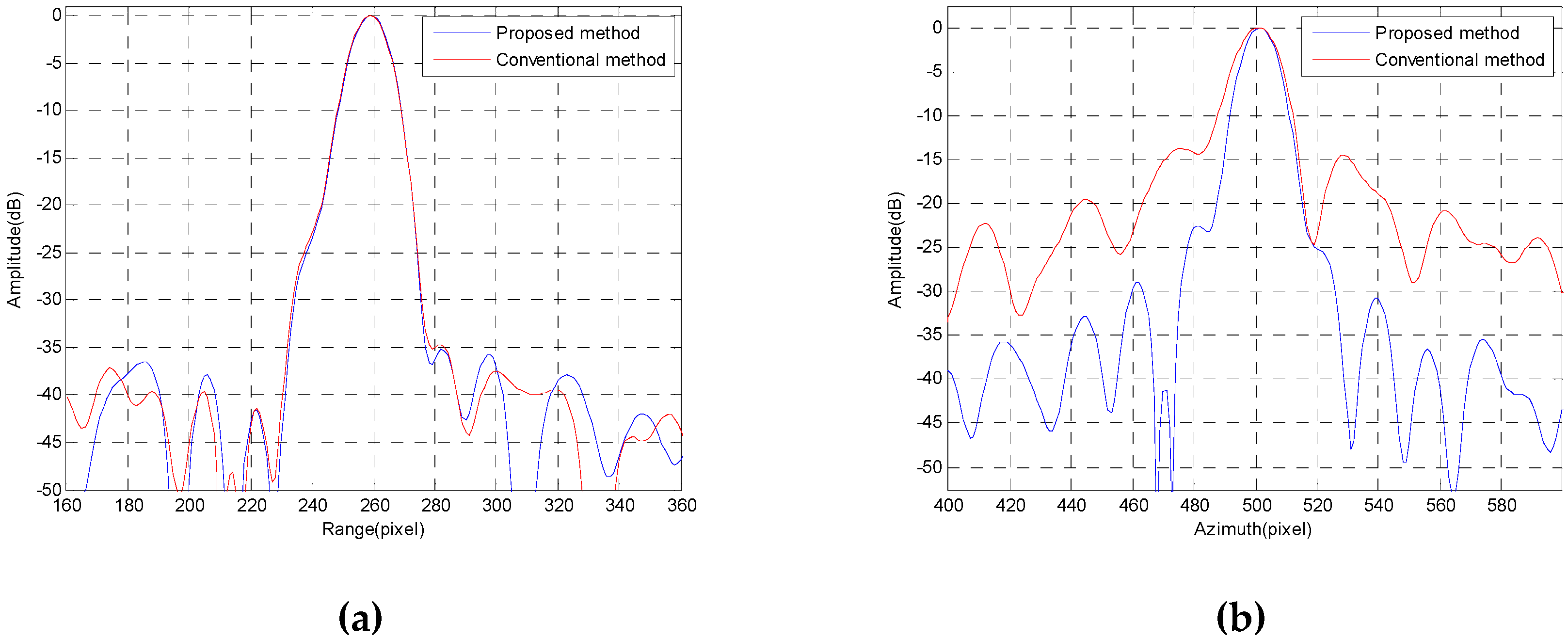
| Item | Conventional Method | Proposed Method |
|---|---|---|
| Azimuth Resolution | 1.32 m | 1.09 m |
| Azimuth PSLR/ISLR | −13.8 dB / −10.6 dB | −23.2 dB / −19.1 dB |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, S.; Tang, L.; Nie, X.; Bai, Y.; Zhang, X.; Li, P. Robust Space Time Adaptive Processing Methods for Synthetic Aperture Radar. Appl. Sci. 2020, 10, 3609. https://doi.org/10.3390/app10103609
Shen S, Tang L, Nie X, Bai Y, Zhang X, Li P. Robust Space Time Adaptive Processing Methods for Synthetic Aperture Radar. Applied Sciences. 2020; 10(10):3609. https://doi.org/10.3390/app10103609
Chicago/Turabian StyleShen, Shijian, Lan Tang, Xin Nie, Yechao Bai, Xinggan Zhang, and Pin Li. 2020. "Robust Space Time Adaptive Processing Methods for Synthetic Aperture Radar" Applied Sciences 10, no. 10: 3609. https://doi.org/10.3390/app10103609
APA StyleShen, S., Tang, L., Nie, X., Bai, Y., Zhang, X., & Li, P. (2020). Robust Space Time Adaptive Processing Methods for Synthetic Aperture Radar. Applied Sciences, 10(10), 3609. https://doi.org/10.3390/app10103609