

Investigating Elderly Individuals’ Acceptance of Artificial Intelligence (AI)-Powered Companion Robots: The Influence of Individual Characteristics

Abstract
1. Introduction
2. Literature Review
2.1. Companion Robot for the Elderly
2.2. Elderly’s Acceptance of Companion Robot
2.3. Individual Characteristics in Technology Acceptance
2.4. AIDUA Model
3. Hypotheses Development and Research Model
3.1. Technology Optimism
3.2. Innovativeness
3.3. Familiarity
3.4. Performance Expectancy
3.5. Effort Expectancy
3.6. Perceived Risk
3.7. Emotion
4. Methodology
4.1. Study Design
4.2. Questionnaire Development
4.3. Sampling Strategy
4.4. Data Analysis
5. Results
5.1. Participants
5.2. Measurement Model Results
5.3. Structural Model Results
5.4. Moderating Effects
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constructs | Items and Descriptions | References |
|---|---|---|
| Familiarity (FAM) | FAM1: I am familiar with the related information and knowledge of AI companion robots. FAM2: I am familiar with brands and products of AI companion robots. FAM3: I am familiar with services provided by AI companion robots and their functions. FAM4: I am familiar with how to operate AI companion robots. | (J. Liu et al., 2023) |
| Technology optimism (TO) | TO1: Products and services that leverage the newest technologies are much easier to use. TO2: I prefer to use the most cutting-edge technology available. TO3: Technology enhances the efficiency of my work. | (Álvarez-Marín et al., 2023) |
| Innovativeness (INN) | INN1: If I find out that there are new technologies, I seek avenues to test them. INN2: Among my peers, I usually take the lead in trying these new technologies. INN3: I like to experiment with new technologies. | (Álvarez-Marín et al., 2023) |
| Performance expectancy (PE) | PE1: I would find using AI companion robots useful in daily life. PE2: Using AI companion robots would help me accomplish things more quickly. PE3: Using AI companion robots has increased my productivity. PE4: AI companion robots would increase my chances of achieving things that are important to me. | (Venkatesh et al., 2012) |
| Effort expectancy (EE) | EE1: Learning how to use AI companion robots would be easy for me. EE2: My interaction with AI companion robots would be clear and understandable. EE3: I would find using AI companion robots easy. EE4: It would be easy for me to become skilful using AI companion robots. | (Venkatesh et al., 2012) |
| Perceived risk (PR) | PR1: The risk of using AI companion robots is high. PR2: The likelihood of unexpected problems with using AI companion robots is high. PR3: The degree of uncertainty related to using AI companion robots is high. PR4: Overall, the possibility of adverse consequences associated with using AI companion robots is high. | (Esmaeilzadeh, 2020) |
| Emotion (EMO) | EMO 1: Bored-relaxed EMO 2: Malancholic-contented EMO 3: Despairing-hopeful EMO 4: Unsatisfied-satisfied EMO 5: Annoyed-pleased | (Lu et al., 2019) |
| Willingness to use (WTU) | WTU1: I am willing to use AI companion robots. WTU2: I feel happy to interact with AI companion robots. WTU3: I am likely to interact with AI companion robots. | (Lu et al., 2019) |
| Objection to use (OTU) | OTU1: I prefer human contact in service transactions. OTU2: I need emotional exchange during service transactions. OTU3: Interaction with AI companion robot lacks social contact. | (Lu et al., 2019) |
| No. | The Original Questionnaire | The Experts’ Suggestions | Authors’ Response |
|---|---|---|---|
| 1 | …The AI companion robot can interact with the elderly through voice, images, and other means to provide emotional support and companionship. | Use examples to introduce the type and function of AI companion robots directly. | The revision is as below: …The AI companion robot can interact with the elderly through voice, images, and other means to provide emotional support and companionship. Datou Aliang elderly companion robot, “Xiaoli” elderly companion robot, UBTECH Health Care Robot Series. Here is the figure of the companion robot in this study. |
| 2 | / | Highlight the anonymity and informed consent form at the beginning of the questionnaire. | We have added instructions for anonymous filling and an informed consent form at the beginning of the questionnaire. |
| 3 | Income (RMB) | Please give a more specific explanation of the variable: income. | We have used “Family monthly income (RMB)” to replace the original “income”. |
| 4 | Family monthly income (RMB): Under 3500; 3500–7000; 7000–10,500; 10,500–14,000; Over 14,000 | The values at both ends of the interval should not be repeated. | The revision is as below: Family monthly income (RMB): Under 3499; 3500–6999; 7000–10,499; 10,500–13,999; Over 14,000 |
| 5 | / | Translate attributive clauses should conform to Chinese reading habits, such as “Products and services that leverage the newest technologies are much easier to use”. Please check all sentences involving this issue. | We have modified all sentences involving the translation of attributive clauses to conform to Chinese reading habits. |
| 6 | / | When measuring one dimension of the variable “emotion”, such as “Bored-relaxed”, you should clearly describe the options corresponding to scores 1 to 5. | We have provided particular explanations for this question and described each option corresponding to scores 1 to 5 separately. |
| 7 | / | Please use the back-translation method or AI tools to check if the English-to-Chinese translation is accurate. | We have used the back-translation method to check the accuracy of translation. |
References
- Al-Adwan, A. S., Li, N., Al-Adwan, A., Abbasi, G. A., Albelbisi, N. A., & Habibi, A. (2023). Extending the technology acceptance model (TAM) to Predict University Students’ intentions to use metaverse-based learning platforms. Education and Information Technologies, 28(11), 15381–15413. [Google Scholar] [CrossRef]
- Alba, J. W., & Hutchinson, J. W. (1987). Dimensions of consumer expertise. Journal of Consumer Research, 13(4), 411–454. [Google Scholar] [CrossRef]
- Aldawsari, S., & Chen, Y.-P. P. (2024). Intervention scenarios and robot capabilities for support, guidance and health monitoring for the elderly. Computer Science Review, 54, 100687. [Google Scholar] [CrossRef]
- Almaiah, M. A., Alfaisal, R., Salloum, S. A., Al-Otaibi, S., Shishakly, R., Lutfi, A., Alrawad, M., Mulhem, A. A., Awad, A. B., & Al-Maroof, R. S. (2022). Integrating teachers’ TPACK levels and students’ learning motivation, technology innovativeness, and optimism in an IoT acceptance model. Electronics, 11(19), 3197. [Google Scholar] [CrossRef]
- Alsaad, A. (2023). The dual effect of anthropomorphism on customers’ decisions to use artificial intelligence devices in hotel services. Journal of Hospitality Marketing & Management, 32(8), 1048–1076. [Google Scholar] [CrossRef]
- Anderson, J. C., & Gerbing, D. W. (1988). Structural equation modeling in practice: A review and recommended two-step approach. Psychological Bulletin, 103(3), 411. [Google Scholar] [CrossRef]
- Aymerich-Franch, L., & Gómez, E. (2024). Public perception of socially assistive robots for healthcare in the EU: A large-scale survey. Computers in Human Behavior Reports, 15, 100465. [Google Scholar] [CrossRef]
- Álvarez-Marín, A., Velázquez-Iturbide, J. Á., & Castillo-Vergara, M. (2023). The acceptance of augmented reality in engineering education: The role of technology optimism and technology innovativeness. Interactive Learning Environments, 31(6), 3409–3421. [Google Scholar] [CrossRef]
- Bansal, G., & Gefen, D. (2010). The impact of personal dispositions on information sensitivity, privacy concern and trust in disclosing health information online. Decision Support Systems, 49(2), 138–150. [Google Scholar] [CrossRef]
- Berridge, C., Zhou, Y., Robillard, J. M., & Kaye, J. (2023). Companion robots to mitigate loneliness among older adults: Perceptions of benefit and possible deception. Frontiers in Psychology, 14, 1106633. [Google Scholar] [CrossRef]
- Bertacchini, F., Demarco, F., Scuro, C., Pantano, P., & Bilotta, E. (2023). A social robot connected with chatGPT to improve cognitive functioning in ASD subjects. Frontiers in Psychology, 14, 1232177. [Google Scholar] [CrossRef]
- Broadbent, E., Billinghurst, M., Boardman, S. G., & Doraiswamy, P. M. (2023). Enhancing social connectedness with companion robots using AI. Science Robotics, 8(80), eadi6347. [Google Scholar] [CrossRef]
- Broadbent, E., Garrett, J., Jepsen, N., Ogilvie, V. L., Ahn, H. S., Robinson, H., Peri, K., Kerse, N., Rouse, P., & Pillai, A. (2018). Using robots at home to support patients with chronic obstructive pulmonary disease: Pilot randomized controlled trial. Journal of Medical Internet Research, 20(2), e8640. [Google Scholar] [CrossRef]
- Chang, H. H., Fu, C. S., & Jain, H. T. (2016). Modifying UTAUT and innovation diffusion theory to reveal online shopping behavior: Familiarity and perceived risk as mediators. Information Development, 32(5), 1757–1773. [Google Scholar] [CrossRef]
- Chi, O. H., Chi, C. G., Gursoy, D., & Nunkoo, R. (2023). Customers’ acceptance of artificially intelligent service robots: The influence of trust and culture. International Journal of Information Management, 70, 102623. [Google Scholar] [CrossRef]
- Chi, O. H., Gursoy, D., & Chi, C. G. (2022). Tourists’ attitudes toward the use of artificially intelligent (AI) devices in tourism service delivery: Moderating role of service value seeking. Journal of Travel Research, 61(1), 170–185. [Google Scholar] [CrossRef]
- Choi, J.-C. (2020). User familiarity and satisfaction with food delivery mobile apps. Sage Open, 10(4), 2158244020970563. [Google Scholar] [CrossRef]
- Chuah, S. H.-W., Aw, E. C.-X., & Yee, D. (2021). Unveiling the complexity of consumers’ intention to use service robots: An fsQCA approach. Computers in Human Behavior, 123, 106870. [Google Scholar] [CrossRef]
- Chung, N., Han, H., & Joun, Y. (2015). Tourists’ intention to visit a destination: The role of augmented reality (AR) application for a heritage site. Computers in Human Behavior, 50, 588–599. [Google Scholar] [CrossRef]
- Coghlan, S., Waycott, J., Lazar, A., & Barbosa Neves, B. (2021). Dignity, autonomy, and style of company: Dimensions older adults consider for robot companions. Proceedings of the ACM on Human-Computer Interaction, 5(CSCW1), 1–25. [Google Scholar] [CrossRef] [PubMed]
- Englefield, J. (2024, January 4). LG designs two-legged Al robot that doubles as “home manager andcompanion”. Available online: https://www.dezeen.com/2024/01/04/lg-two-legged-ai-robot-home-manager-companion/ (accessed on 6 May 2025).
- Esmaeilzadeh, P. (2020). Use of AI-based tools for healthcare purposes: A survey study from consumers’ perspectives. BMC Medical Informatics and Decision Making, 20, 1–19. [Google Scholar] [CrossRef]
- Esmaeilzadeh, P., & Maddah, M. (2024). Robotic companions and healthy aging: A mixed-methods exploration of older adults’ perspectives and insights. Technology in Society, 78, 102689. [Google Scholar] [CrossRef]
- Fan, Y. (2024, June 14). China’s solution for a growing senior care crisis: Millions of robots. Available online: https://www.sixthtone.com/news/1013063 (accessed on 2 May 2025).
- Feng, Z., Glinskaya, E., Chen, H., Gong, S., Qiu, Y., Xu, J., & Yip, W. (2020). Long-term care system for older adults in China: Policy landscape, challenges, and future prospects. The Lancet, 396(10259), 1362–1372. [Google Scholar] [CrossRef] [PubMed]
- Fornell, C., & Larcker, D. F. (1981). Evaluating structural equation models with unobservable variables and measurement error. Journal of Marketing Research, 18(1), 39–50. [Google Scholar] [CrossRef]
- Fracasso, F., Buchweitz, L., Theil, A., Cesta, A., & Korn, O. (2022). Social robots acceptance and marketability in Italy and Germany: A cross-national study focusing on assisted living for older adults. International Journal of Social Robotics, 14(6), 1463–1480. [Google Scholar] [CrossRef]
- Gasteiger, N., Ahn, H. S., Fok, C., Lim, J., Lee, C., MacDonald, B. A., Kim, G. H., & Broadbent, E. (2022). Older adults’ experiences and perceptions of living with Bomy, an assistive dailycare robot: A qualitative study. Assistive Technology, 34(4), 487–497. [Google Scholar] [CrossRef]
- Gupta, V. (2024). An empirical evaluation of a generative artificial intelligence technology adoption model from entrepreneurs’ perspectives. Systems, 12(3), 103. [Google Scholar] [CrossRef]
- Gursoy, D., Chi, O. H., Lu, L., & Nunkoo, R. (2019). Consumers acceptance of artificially intelligent (AI) device use in service delivery. International Journal of Information Management, 49, 157–169. [Google Scholar] [CrossRef]
- Heerink, M., Kröse, B., Evers, V., & Wielinga, B. (2010). Assessing acceptance of assistive social agent technology by older adults: The Almere model. Springer. [Google Scholar] [CrossRef]
- Hu, L., & Bentler, P. M. (1999). Cutoff criteria for fit indexes in covariance structure analysis: Conventional criteria versus new alternatives. Structural Equation Modeling: A Multidisciplinary Journal, 6(1), 1–55. [Google Scholar] [CrossRef]
- Huang, T., & Huang, C. (2020). Elderly’s acceptance of companion robots from the perspective of user factors. Universal Access in the Information Society, 19(4), 935–948. [Google Scholar] [CrossRef]
- Huang, T., & Huang, C. (2021). Attitudes of the elderly living independently towards the use of robots to assist with activities of daily living. Work, 69(1), 55–65. [Google Scholar] [CrossRef] [PubMed]
- Jang, S. H., & Lee, C. W. (2018). The impact of location-based service factors on usage intentions for technology acceptance: The moderating effect of innovativeness. Sustainability, 10(6), 1876. [Google Scholar] [CrossRef]
- Kamal, S. A., Shafiq, M., & Kakria, P. (2020). Investigating acceptance of telemedicine services through an extended technology acceptance model (TAM). Technology in Society, 60, 101212. [Google Scholar] [CrossRef]
- Karahanna, E., Straub, D. W., & Chervany, N. L. (1999). Information technology adoption across time: A cross-sectional comparison of pre-adoption and post-adoption beliefs. MIS Quarterly, 23(2), 183–213. [Google Scholar] [CrossRef]
- Kim, J., Kim, S., Kim, S., Lee, E., Heo, Y., Hwang, C.-Y., Choi, Y.-Y., Kong, H.-J., Ryu, H., & Lee, H. (2021). Companion robots for older adults: Rodgers’ evolutionary concept analysis approach. Intelligent Service Robotics, 14, 729–739. [Google Scholar] [CrossRef]
- Kok, C. L., Ho, C. K., Teo, T. H., Kato, K., & Koh, Y. Y. (2024). A novel implementation of a social robot for sustainable human engagement in homecare services for ageing populations. Sensors, 24(14), 4466. [Google Scholar] [CrossRef]
- Krakovski, M., Kumar, S., Givati, S., Bardea, M., Zafrani, O., Nimrod, G., Bar-Haim, S., & Edan, Y. (2021). “Gymmy”: Designing and testing a robot for physical and cognitive training of older adults. Applied Sciences, 11(14), 6431. [Google Scholar] [CrossRef]
- Lazarus, R. S. (1991a). Cognition and motivation in emotion. American Psychologist, 46(4), 352. [Google Scholar] [CrossRef]
- Lazarus, R. S. (1991b). Progress on a cognitive-motivational-relational theory of emotion. American Psychologist, 46(8), 819. [Google Scholar] [CrossRef] [PubMed]
- Lee, O. E., Lee, H., Park, A., & Choi, N. G. (2024). My precious friend: Human-Robot interactions in home care for socially isolated older adults. Clinical Gerontologist, 47(1), 161–170. [Google Scholar] [CrossRef] [PubMed]
- Li, W., Ding, H., Gui, J., & Tang, Q. (2024). Patient acceptance of medical service robots in the medical intelligence era: An empirical study based on an extended AI device use acceptance model. Humanities and Social Sciences Communications, 11(1), 1495. [Google Scholar] [CrossRef]
- Lin, H., Chi, O. H., & Gursoy, D. (2020). Antecedents of customers’ acceptance of artificially intelligent robotic device use in hospitality services. Journal of Hospitality Marketing & Management, 29(5), 530–549. [Google Scholar] [CrossRef]
- Liu, J., Wan, F., Zou, J., & Zhang, J. (2023). Exploring factors affecting people’s willingness to use a voice-based in-car assistant in electric cars: An empirical study. World Electric Vehicle Journal, 14(3), 73. [Google Scholar] [CrossRef]
- Liu, Y., Gan, Y., Song, Y., & Liu, J. (2021). What influences the perceived trust of a voice-enabled smart home system: An empirical study. Sensors, 21(6), 2037. [Google Scholar] [CrossRef]
- Lu, L., Cai, R., & Gursoy, D. (2019). Developing and validating a service robot integration willingness scale. International Journal of Hospitality Management, 80, 36–51. [Google Scholar] [CrossRef]
- Ma, X., & Huo, Y. (2023). Are users willing to embrace ChatGPT? Exploring the factors on the acceptance of chatbots from the perspective of AIDUA framework. Technology in Society, 75, 102362. [Google Scholar] [CrossRef]
- Nan, D., Kim, Y., Huang, J., Jung, H. S., & Kim, J. H. (2022). Factors affecting intention of consumers in using face recognition payment in offline markets: An acceptance model for future payment service. Frontiers in Psychology, 13, 830152. [Google Scholar] [CrossRef]
- Nepomuceno, M. V., Laroche, M., & Richard, M.-O. (2014). How to reduce perceived risk when buying online: The interactions between intangibility, product knowledge, brand familiarity, privacy and security concerns. Journal of Retailing and Consumer Services, 21(4), 619–629. [Google Scholar] [CrossRef]
- Norman, D. (2004). Emotional design: Why we love (or hate) everyday things. Basic Civitas Books. ISBN 0465051359. [Google Scholar]
- Obrenovic, B., Gu, X., Wang, G., Godinic, D., & Jakhongirov, I. (2024). Generative AI and human–robot interaction: Implications and future agenda for business, society and ethics. AI & Society, 40, 677–690. [Google Scholar] [CrossRef]
- Parasuraman, A. (2000). Technology Readiness Index (TRI) a multiple-item scale to measure readiness to embrace new technologies. Journal of Service Research, 2(4), 307–320. [Google Scholar] [CrossRef]
- Parasuraman, A., & Colby, C. L. (2015). An updated and streamlined technology readiness index: TRI 2.0. Journal of Service Research, 18(1), 59–74. [Google Scholar] [CrossRef]
- Rauf, N. H., & Santoso, H. A. (2023). Human-robot interaction on elderly companion robot development using dual intent entity transformer. In Proceedings of the 2023 IEEE 7th international conference on information technology, information systems and electrical engineering (ICITISEE), Purwokerto, Indonesia, 29–30 November 2023 (pp. 268–274). IEEE. [Google Scholar] [CrossRef]
- Ren, Z. (2024, October 27). Silicon Ai intelligent emotional companion robot helps smart pension become a hot spot in the capital market. Available online: https://roll.sohu.com/a/820831848_121611385 (accessed on 5 May 2025).
- Revell, G. (2024). Generative ai applications in the health and well-being domain: Virtual and robotic assistance and the need for niche language models (nlms). In Applications of generative AI (pp. 189–207). Springer. [Google Scholar] [CrossRef]
- Ribeiro, M. A., Gursoy, D., & Chi, O. H. (2022). Customer acceptance of autonomous vehicles in travel and tourism. Journal of Travel Research, 61(3), 620–636. [Google Scholar] [CrossRef]
- Rogers, E. M., Singhal, A., & Quinlan, M. M. (2014). Diffusion of innovations. In An integrated approach to communication theory and research (pp. 432–448). Routledge. [Google Scholar]
- Samsung Newsroom. (2024). A day in the life with Ballie: An AI companion robot for the home. Available online: https://news.samsung.com/us/samsung-ballie-ai-companion-robot-home-video-ces-2024 (accessed on 3 May 2025).
- Seo, K. H., & Lee, J. H. (2021). The emergence of service robots at restaurants: Integrating trust, perceived risk, and satisfaction. Sustainability, 13(8), 4431. [Google Scholar] [CrossRef]
- Shanmugavel, N., & Micheal, M. (2022). Exploring the marketing related stimuli and personal innovativeness on the purchase intention of electric vehicles through technology acceptance model. Cleaner Logistics and Supply Chain, 3, 100029. [Google Scholar] [CrossRef]
- Shavit, T., Lahav, E., & Rosenboim, M. (2016). Don’t fear risk, learn about it: How familiarity reduces perceived risk. Applied Economics Letters, 23(15), 1069–1072. [Google Scholar] [CrossRef]
- Steinfeld, E., & Maisel, J. (2012). Universal design: Creating inclusive environments. John Wiley & Sons. [Google Scholar]
- Sun, X., Chen, Z., & Jiang, Q. (2024). An empirical study on the willingness of young elderly to use elderly companion robot. International Journal of Human–Computer Interaction, 41, 4015–4036. [Google Scholar] [CrossRef]
- Tizhoosh, H. R., & Pantanowitz, L. (2018). Artificial intelligence and digital pathology: Challenges and opportunities. Journal of Pathology Informatics, 9(1), 38. [Google Scholar] [CrossRef]
- Venkatesh, V. (2022). Adoption and use of AI tools: A research agenda grounded in UTAUT. Annals of Operations Research, 308(1), 641–652. [Google Scholar] [CrossRef]
- Venkatesh, V., Thong, J. Y. L., & Xu, X. (2012). Consumer acceptance and use of information technology: Extending the unified theory of acceptance and use of technology. MIS Quarterly, 36(1), 157–178. [Google Scholar] [CrossRef]
- Wang, C., Chen, S., Wu, Y., Zhang, Z., Zhou, L., Liu, S., Chen, Z., Liu, Y., Wang, H., & Li, J. (2023). Neural codec language models are zero-shot text to speech synthesizers. arXiv, arXiv:2301.02111. [Google Scholar] [CrossRef]
- Wang, L., Zhang, Q., Ye, M.-J., Wong, P. P. W., & Gong, Y. (2024). Green hotels visit intention among young adults: Integrating the familiarity, novelty, trust, perceived risk, and theory of planned behaviour. Humanities and Social Sciences Communications, 11(1), 1390. [Google Scholar] [CrossRef]
- WHO. (2024). Ageing and health in China. Available online: https://www.who.int/china/health-topics/ageing (accessed on 2 May 2025).
- Yang, Q., & Lee, Y.-C. (2024). Enhancing financial advisory services with GenAI: Consumer perceptions and attitudes through service-dominant logic and artificial intelligence device use acceptance perspectives. Journal of Risk and Financial Management, 17(10), 470. [Google Scholar] [CrossRef]
- Zhao, X., Zhang, S., Sun, S., Nan, D., & Kim, J. H. (2025). Exploring factors influencing word-of-mouth intentions for AI profile picture generation services: Evidence from the TAM, self-presentation theory, and perceived risk theory. International Journal of Human–Computer Interaction, 1–9. [Google Scholar] [CrossRef]
- Zilber. (2022). Elderly New Yorkers to get robots to retrieve loneliness. New York Post. Available online: https://nypost.com/2022/05/25/elderly-new-yorkers-to-get-robots-to-help-relieve-loneliness/ (accessed on 2 May 2025).


| Attribute | Value | Frequency | Percent |
|---|---|---|---|
| Gender | Male | 250 | 55.3% |
| Female | 202 | 44.7% | |
| Age | 60–64 | 103 | 22.8% |
| 65–69 | 134 | 29.6% | |
| 70–74 | 134 | 29.6% | |
| 75–79 | 63 | 13.9% | |
| 80 or above | 18 | 4.0% | |
| Educational level | Under primary school | 89 | 19.7% |
| Junior high school | 111 | 24.6% | |
| High school/technical secondary school | 119 | 26.3% | |
| Diploma | 90 | 19.9% | |
| Undergraduate or above | 43 | 9.5% | |
| Family Monthly income (RMB) | Under 3499 | 63 | 13.9% |
| 3500–6999 | 135 | 29.9% | |
| 7000–10,499 | 145 | 32.1% | |
| 10,500–13,999 | 83 | 18.4% | |
| Over 14,000 | 26 | 5.7% |
| Constructs | Items | Standardised Factor Loading | Average Variance Extracted (AVE) | Composite Reliability (CR) |
|---|---|---|---|---|
| Familiarity (FAM) | FAM1 | 0.853 | 0.721 | 0.912 |
| FAM2 | 0.893 | |||
| FAM3 | 0.839 | |||
| FAM4 | 0.810 | |||
| Technology optimism (TO) | TO1 | 0.854 | 0.690 | 0.870 |
| TO2 | 0.779 | |||
| TO3 | 0.857 | |||
| Innovativeness (INN) | INN1 | 0.810 | 0.677 | 0.863 |
| INN2 | 0.813 | |||
| INN3 | 0.845 | |||
| Performance expectancy (PE) | PE1 | 0.901 | 0.730 | 0.915 |
| PE2 | 0.859 | |||
| PE3 | 0.815 | |||
| PE4 | 0.840 | |||
| Effort expectancy (EE) | EE1 | 0.854 | 0.730 | 0.916 |
| EE2 | 0.832 | |||
| EE3 | 0.860 | |||
| EE4 | 0.872 | |||
| Perceived risk (PR) | PR1 | 0.898 | 0.762 | 0.928 |
| PR2 | 0.893 | |||
| PR3 | 0.848 | |||
| PR4 | 0.852 | |||
| Emotion (EMO) | EMO1 | 0.809 | 0.709 | 0.924 |
| EMO2 | 0.874 | |||
| EMO3 | 0.863 | |||
| EMO4 | 0.813 | |||
| EMO5 | 0.848 | |||
| Willingness to use (WTU) | WTU1 | 0.830 | 0.710 | 0.880 |
| WTU2 | 0.858 | |||
| WTU3 | 0.840 | |||
| Objection to use (OTU) | OTU1 | 0.877 | 0.720 | 0.885 |
| OTU2 | 0.837 | |||
| OTU3 | 0.831 |
| Construct | AVE | FAM | TO | INN | PE | EE | PR | EMO | WTU | OTU |
|---|---|---|---|---|---|---|---|---|---|---|
| FAM | 0.721 | (0.849) | ||||||||
| TO | 0.690 | 0.168 ** | (0.831) | |||||||
| INN | 0.677 | 0.098 | 0.344 *** | (0.823) | ||||||
| PE | 0.730 | 0.107 * | 0.254 *** | 0.293 *** | (0.854) | |||||
| EE | 0.730 | 0.144 ** | 0.288 *** | 0.295 *** | 0.222 *** | (0.854) | ||||
| PR | 0.762 | −0.281 *** | 0.127 * | 0.127 * | 0.181 *** | 0.058 | (0.873) | |||
| EMO | 0.709 | 0.175 ** | 0.302 *** | 0.316 *** | 0.227 *** | 0.299 *** | −0.113 * | (0.842) | ||
| WTU | 0.710 | 0.021 | 0.206 *** | 0.254 *** | 0.257 *** | 0.226 *** | 0.132 * | 0.224 *** | (0.843) | |
| OTU | 0.720 | 0.042 | 0.123 * | −0.028 | 0.116 * | 0.070 | 0.089 | −0.222 *** | 0.121 * | (0.849) |
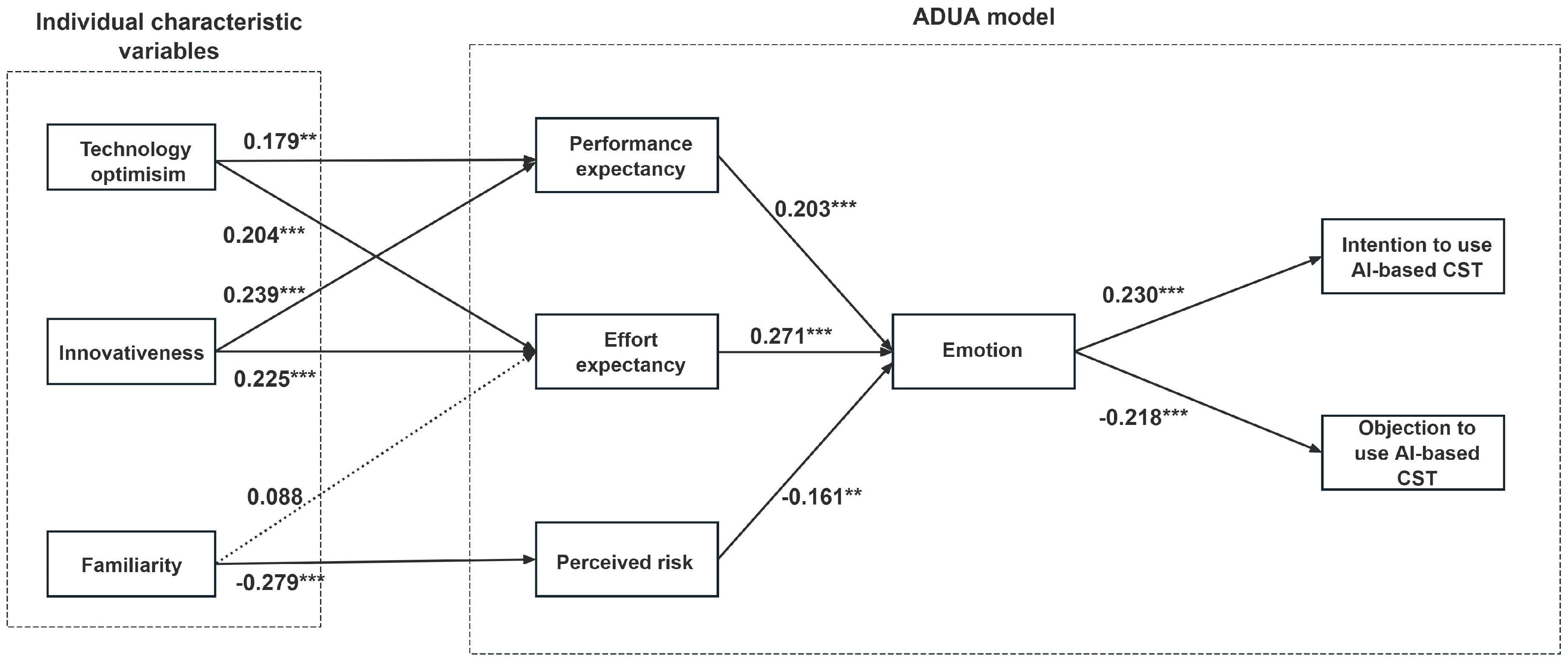
| Hypotheses | Relationships | Standardised Coefficient | T-Value | p-Value | Supported |
|---|---|---|---|---|---|
| H1 | TO → PE | 0.179 | 2.961 | 0.003 | Supported |
| H2 | TO → EE | 0.204 | 3.674 | 0.000 | Supported |
| H3 | INN → PE | 0.239 | 4.060 | 0.000 | Supported |
| H4 | INN → EE | 0.225 | 3.920 | 0.000 | Supported |
| H5 | FAM → EE | 0.088 | 1.658 | 0.097 | Not supported |
| H6 | FAM → PR | −0.279 | −5.360 | 0.000 | Supported |
| H7 | PE → EMO | 0.203 | 3.787 | 0.000 | Supported |
| H8 | EE → EMO | 0.271 | 5.185 | 0.000 | Supported |
| H9 | PR → EMO | −0.161 | −3.409 | 0.001 | Supported |
| H10 | EMO → WTU | 0.230 | 4.325 | 0.000 | Supported |
| H11 | EMO → OTU | −0.218 | −3.911 | 0.000 | Supported |
| Path Direction | Male | Female | Sig. Diff. |
|---|---|---|---|
| TO → PE | 0.176 * | 0.175 * | 0.001 |
| TO → EE | 0.234 ** | 0.154 | −0.166 |
| INN → PE | 0.184 ** | 0.350 *** | 0.079 |
| INN → EE | 0.219 ** | 0.285 ** | −0.066 |
| FAM → EE | 0.023 | 0.159 * | −0.136 |
| FAM → PR | −0.221 ** | −0.360 *** | 0.139 |
| Path Direction | Low-Level Group | High-Level Group | Sig. Diff. |
|---|---|---|---|
| TO → PE | 0.236 ** | 0.139 | 0.097 |
| TO → EE | 0.287 *** | 0.117 | −0.094 |
| INN → PE | 0.214 ** | 0.308 ** | 0.170 |
| INN → EE | 0.231 ** | 0.224 * | 0.007 |
| FAM → EE | 0.039 | 0.138 | −0.098 |
| FAM → PR | −0.266 *** | −0.319 *** | 0.053 |
| Path Direction | Low-Level Group | High-Level Group | Sig. Diff. |
|---|---|---|---|
| TO → PE | 0.221 ** | 0.143 | 0.077 |
| TO → EE | 0.290 *** | 0.135 | −0.139 |
| INN → PE | 0.197 * | 0.336 *** | 0.154 |
| INN → EE | 0.186 * | 0.305 ** | −0.120 |
| FAM → EE | 0.044 | 0.120 | −0.076 |
| FAM → PR | −0.240 ** | −0.325 *** | 0.085 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Wang, X.; Zhang, J. Investigating Elderly Individuals’ Acceptance of Artificial Intelligence (AI)-Powered Companion Robots: The Influence of Individual Characteristics. Behav. Sci. 2025, 15, 697. https://doi.org/10.3390/bs15050697
Liu J, Wang X, Zhang J. Investigating Elderly Individuals’ Acceptance of Artificial Intelligence (AI)-Powered Companion Robots: The Influence of Individual Characteristics. Behavioral Sciences. 2025; 15(5):697. https://doi.org/10.3390/bs15050697
Chicago/Turabian StyleLiu, Jing, Xingang Wang, and Jiaqi Zhang. 2025. "Investigating Elderly Individuals’ Acceptance of Artificial Intelligence (AI)-Powered Companion Robots: The Influence of Individual Characteristics" Behavioral Sciences 15, no. 5: 697. https://doi.org/10.3390/bs15050697
APA StyleLiu, J., Wang, X., & Zhang, J. (2025). Investigating Elderly Individuals’ Acceptance of Artificial Intelligence (AI)-Powered Companion Robots: The Influence of Individual Characteristics. Behavioral Sciences, 15(5), 697. https://doi.org/10.3390/bs15050697