The Optimal Location of Ground-Based GNSS Augmentation Transceivers


Abstract
1. Introduction
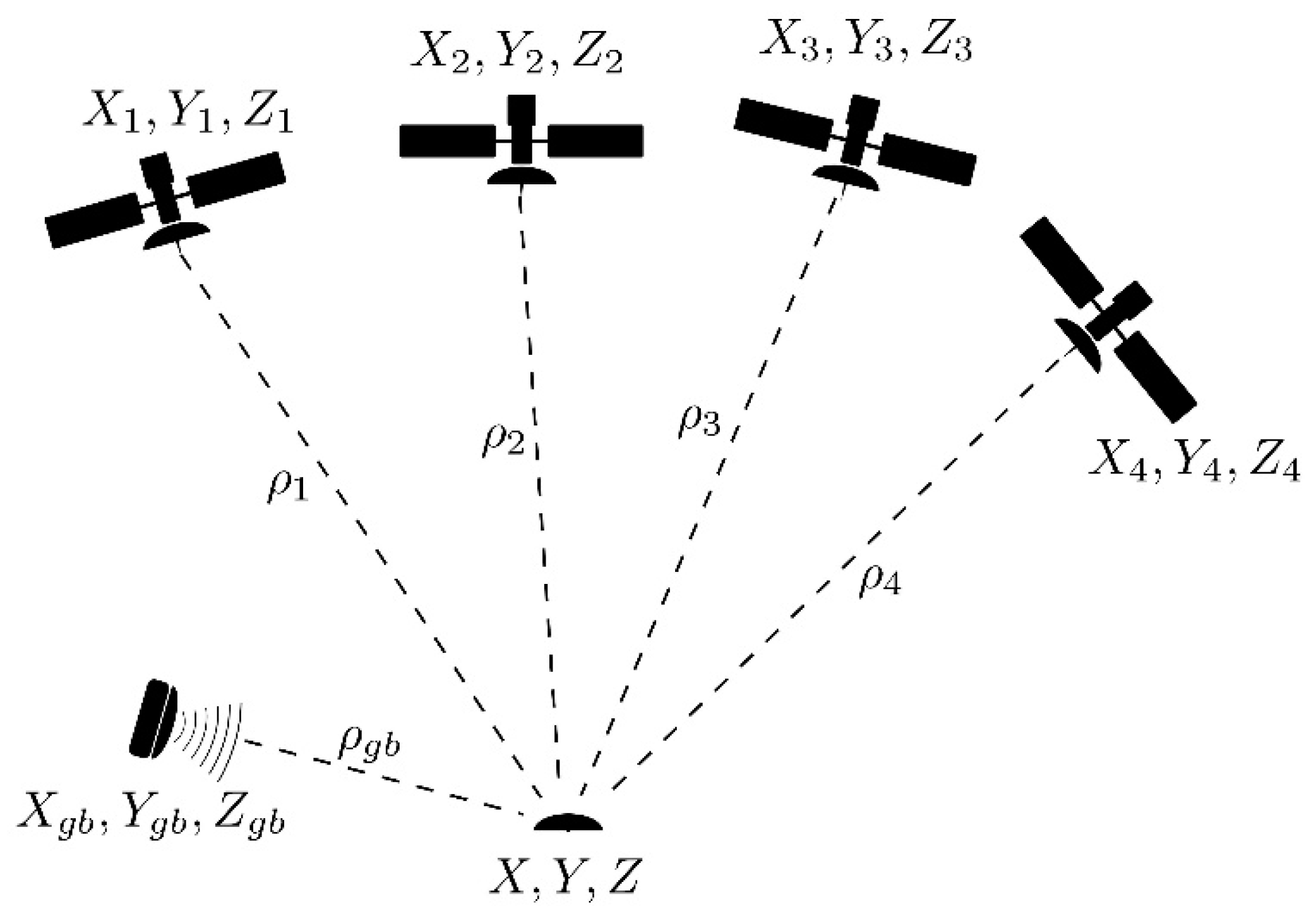
2. Calculation of DOP Values
- geometric dilution of precision (GDOP);
- position (3D) dilution of precision (PDOP);
- time dilution of precision (TDOP)
3. DOP Optimization Strategy
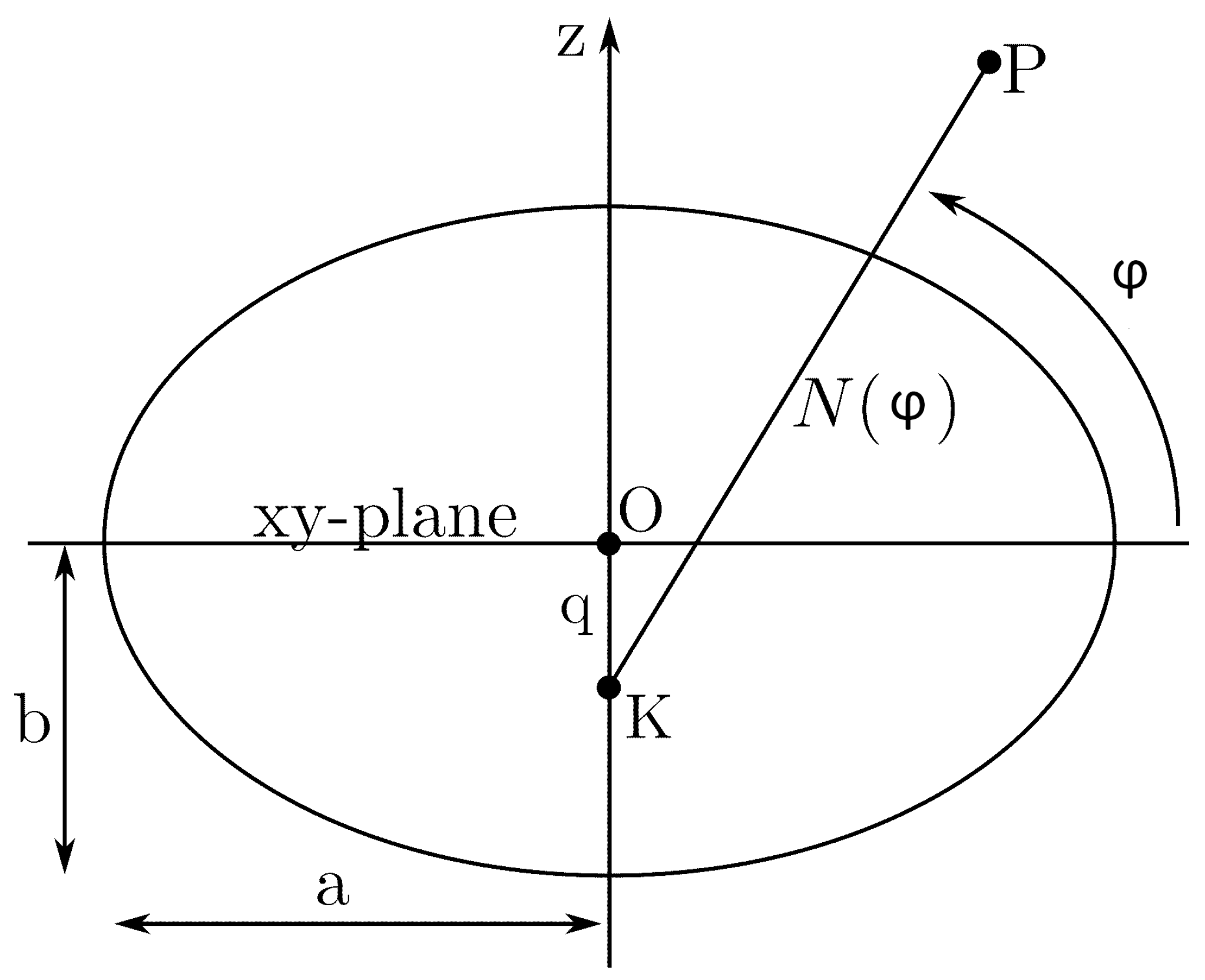
3.1. Coordinate Transformation
3.2. Objective Function
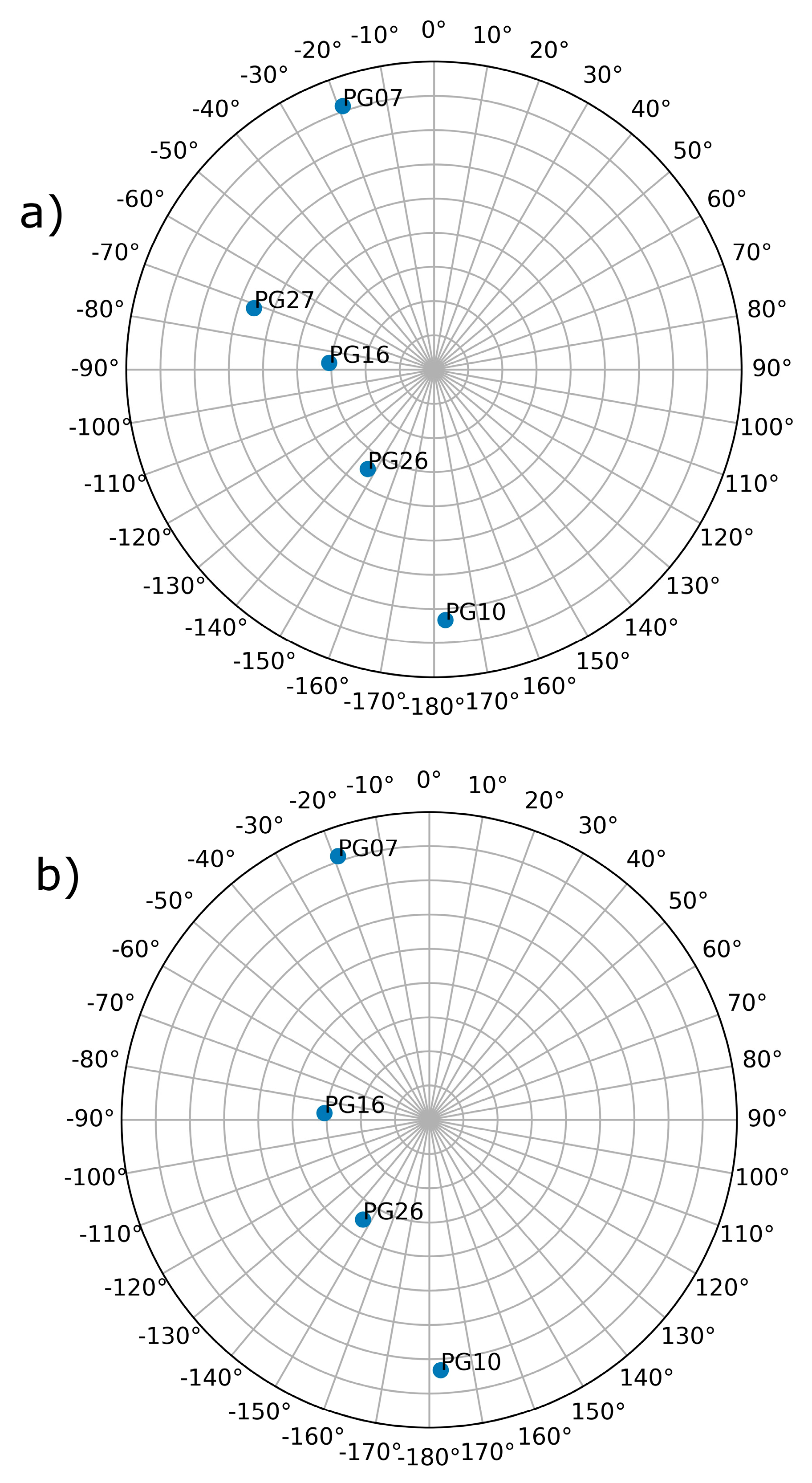
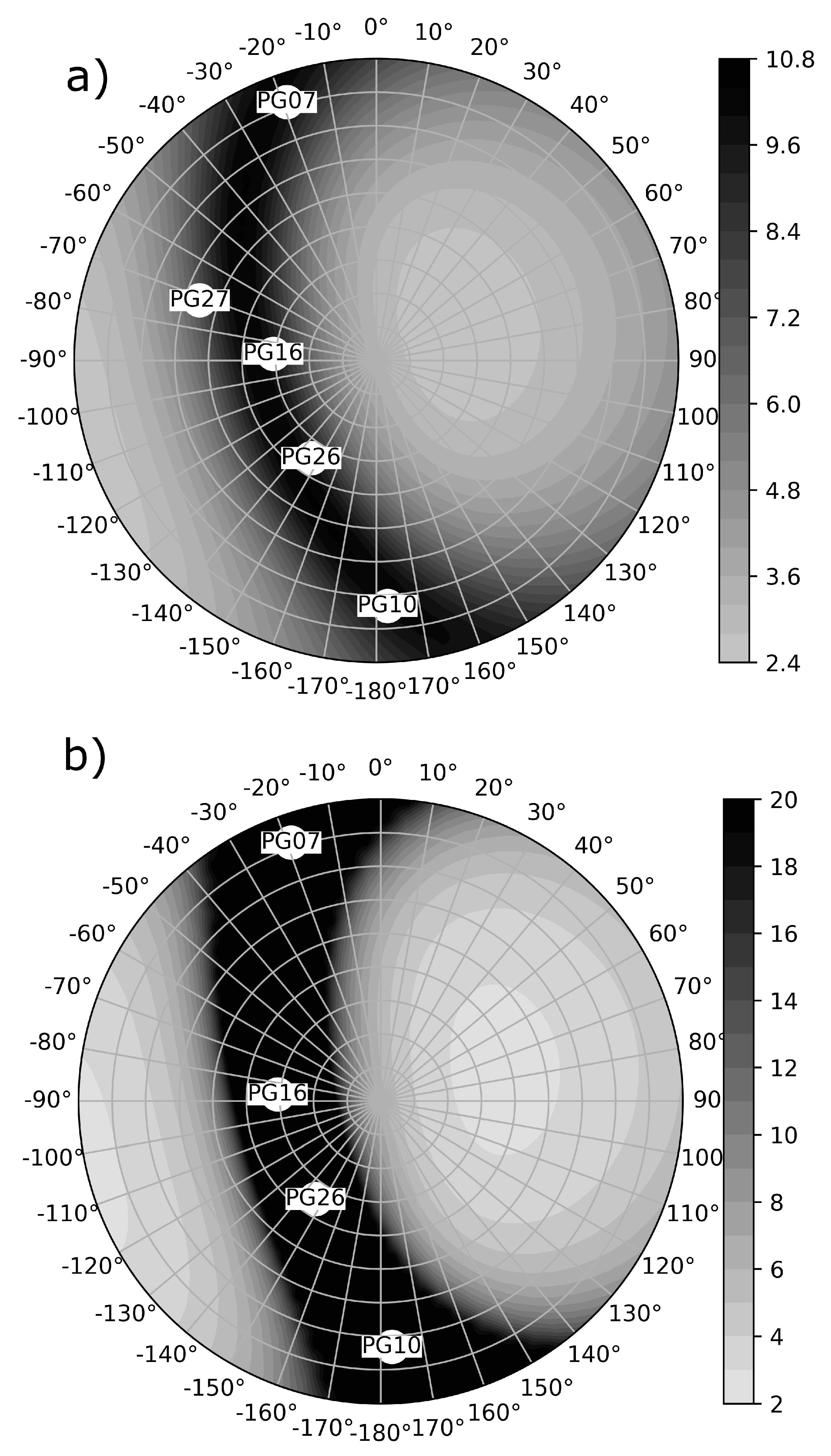
4. Case Study
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Braff, R.; Shively, C. A method of over bounding ground-based augmentation system (GBAS) heavy tail error distributions. J. Navig. 2005, 58, 83103. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, H.; Yu, M.; Guo, H. RSSI Ranging Model and 3D Indoor Positioning with ZigBee Network. In Proceedings of the 2012 IEEE/ION Position Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 1233–1239. [Google Scholar] [CrossRef]
- Farid, Z.; Nordin, R.; Ismail, M. Recent advances in wireless indoor localization techniques and system. J. Comput. Netw. Commun. 2013, 2013, 185138. [Google Scholar] [CrossRef]
- Rapinski, J.; Cellmer, S. Analysis of Range Based Indoor Positioning Techniques for Personal Communication Networks. Mob. Netw. Appl. 2016, 21, 539–549. [Google Scholar] [CrossRef]
- Rapinski, J.; Smieja, M. ZigBee Ranging using Phase Shift Measurements. J. Navig. 2015, 68, 665–677. [Google Scholar] [CrossRef]
- Koyuncu, H.; Shuang, H. A survey of indoor positioning and object locating systems, IJCSNS International. J. Comput. Sci. Netw. Secur. 2010, 10, 121–128. [Google Scholar]
- Janowski, A.; Rapinski, J. The analyzes of PDOP factors for a ZigBee groundbased augmentation systems. Pol. Marit. Res. 2017, 24, 108–114. [Google Scholar] [CrossRef]
- Sahinoglu, Z.; Gezici, S.; Guvenc, I. Ultra-wideband Positioning Systems: Theoretical Limits, Ranging Algorithms, and Protocols; Cambridge University Press: Cambridge, UK, 2008; ISBN 9780521873093. [Google Scholar]
- Rapinski, J. The application of ZigBee phase shift measurement in ranging. Acta Geodyn. Geomater. 2015, 12, 291780. [Google Scholar] [CrossRef]
- Bobkowska, K.; Inglot, A.; Mikusova, M.; Tysiąc, P. Implementation of Spatial Information for Monitoring and Analysis of the Area Around the Port Using Laser Scanning Techniques. Pol. Marit. Res. 2017, 24, 10–15. [Google Scholar] [CrossRef]
- Janowski, A.; Szulwic, J.; Tysiąc, P.; Wojtowicz, A. Airborne and mobile laser scanning in measurements of sea cliffs on the southern Baltic. In Proceedings of the 15th International Multidisciplinary Scientific Geoconference SGEM 2015, Albena, Bulgaria, 18–24 June 2015; Volume 2. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Kleusberg, A. GPS for Geodesy; Springer: Berlin/Heidelberg, Germany, 1998; ISBN 978-3-642-72013-0. [Google Scholar] [CrossRef]
- Farrell, J.A. Aided Navigation GPS with High Rate Sensors; McGraw-Hill: New York, NJ, USA, 2008; ISBN 0071493298/9780071493291. [Google Scholar]
- Liu, B.; Teng, Y.; Huang, Q. GDOP minimum in multi-GNSS positioning. Adv. Space Res. 2017, 60, 1400–1403. [Google Scholar] [CrossRef]
- Byrd, R.H.; Lu, P.; Nocedal, J. A Limited Memory Algorithm for Bound Constrained Optimization. SIAM J. Sci. Stat. Comput. 1995, 16, 1190–1208. [Google Scholar] [CrossRef]
- Morales, J.L.; Nocedal, J. L-BFGS-B: Remark on Algorithm 778: L-BFGS-B, FORTRAN routines for large scale bound constrained optimization. ACM Trans. Math. Softw. 2011, 38, 1. [Google Scholar] [CrossRef]
- Wolfe, P. Convergence conditions for ascent methods. SIAM Rev. 1969, 11, 226–235. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S. Numerical Optimization; Springer: New York, NY, USA, 2006; ISBN 978-0-387-40065-5. [Google Scholar]
- McKinney, W. Python for Data Analysis: Data Wrangling with Pandas, NumPy, and IPython; O’Reilly Media: Sebastopol, CA, USA, 2012. [Google Scholar]
- International Civil Aviation Organization (ICAO). Annex 10 to the Convention on the Internation Civil Aviation Volume I (Radio Navigation Aids), 5th ed.; International Civil Aviation Organization (ICAO): Montréal, QC, Canada, 2007. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Position | ||||
|---|---|---|---|---|
| Iteration | NE | SE | SW | NW |
| 0 | 3.75 | 5.58 | 16.54 | 34.41 |
| 1 | 3.11 | 5.86 | 12.53 | 12.53 |
| 2 | 2.91 | 4.66 | 7.98 | 7.98 |
| 3 | 2.76 | 3.23 | 6.20 | 6.20 |
| 4 | 2.75 | 2.98 | 4.64 | 4.64 |
| 5 | 2.83 | 3.72 | 3.72 | |
| 6 | 2.75 | 3.12 | 3.12 | |
| 7 | 2.75 | 2.82 | 2.82 | |
| 8 | 2.76 | 2.76 | ||
| 9 | 2.75 | 2.75 | ||
| 10 | 2.75 | 2.75 | ||
| 11 | 2.75 | 2.75 | ||
| Initial Position | ||||
|---|---|---|---|---|
| NE | SE | SW | NW | |
| Number of iterations | 4 | 7 | 11 | 11 |
| Number of function evaluations | 18 | 28 | 13 | 13 |
| Number of segments explored during Cauchy searches | 5 | 8 | 13 | 13 |
| Number of BFGS updates skipped | 0 | 0 | 0 | 0 |
| Number of active bounds at final generalized | 0 | 0 | 1 | 1 |
| Cauchy point norm of the final projected gradient | 0.27 | 2.64 | 1.12 × 10−8 | 1.12 × 10−8 |
| Final function value | 2.75 | 2.75 | 2.75 | 2.75 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rapinski, J.; Janowski, A. The Optimal Location of Ground-Based GNSS Augmentation Transceivers. Geosciences 2019, 9, 107. https://doi.org/10.3390/geosciences9030107
Rapinski J, Janowski A. The Optimal Location of Ground-Based GNSS Augmentation Transceivers. Geosciences. 2019; 9(3):107. https://doi.org/10.3390/geosciences9030107
Chicago/Turabian StyleRapinski, Jacek, and Artur Janowski. 2019. "The Optimal Location of Ground-Based GNSS Augmentation Transceivers" Geosciences 9, no. 3: 107. https://doi.org/10.3390/geosciences9030107
APA StyleRapinski, J., & Janowski, A. (2019). The Optimal Location of Ground-Based GNSS Augmentation Transceivers. Geosciences, 9(3), 107. https://doi.org/10.3390/geosciences9030107