Down-Sampling of Point Clouds for the Technical Diagnostics of Buildings and Structures



Abstract
1. Introduction
2. Motivation
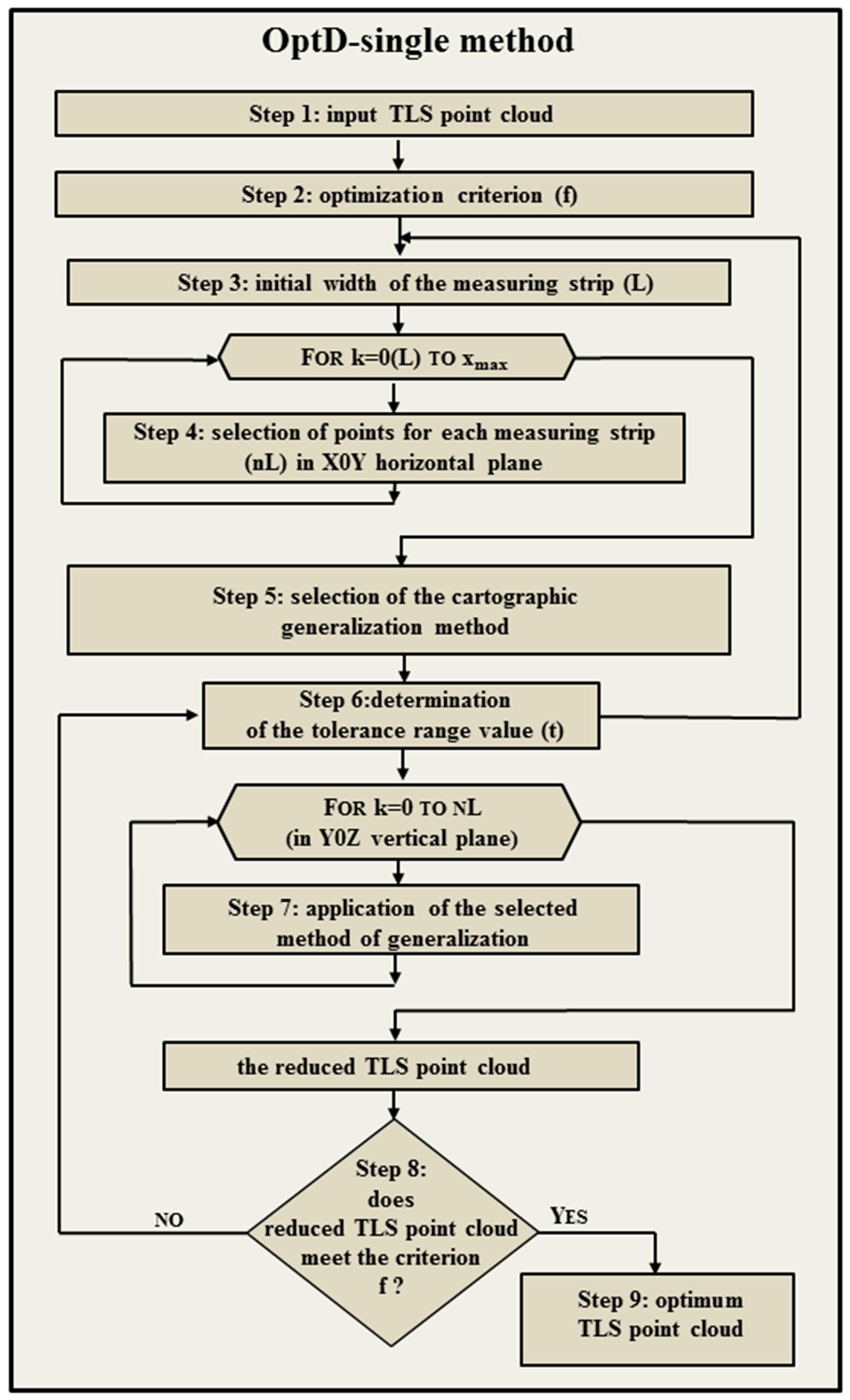
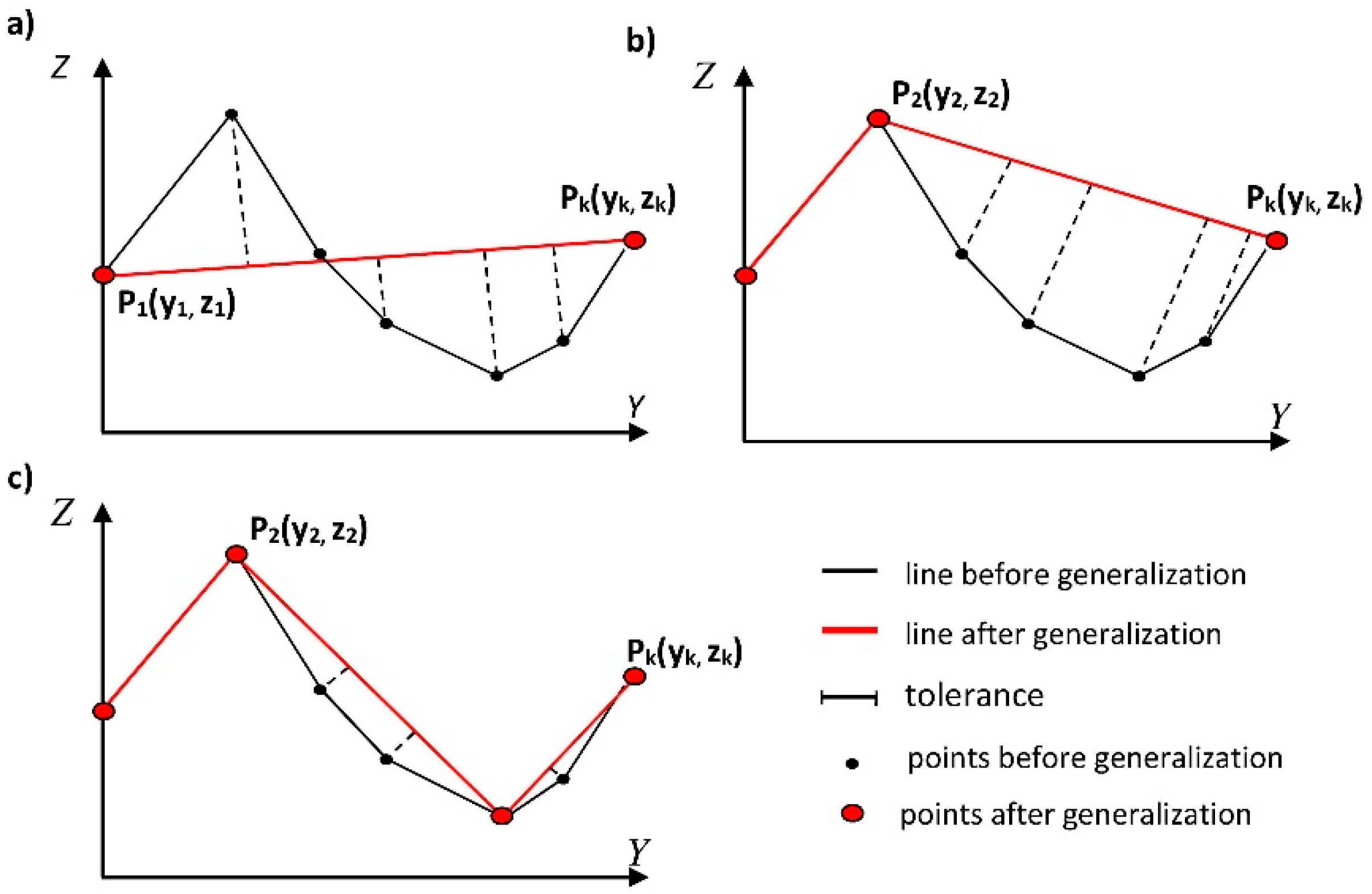
3. Optimization of Large Datasets Based on Using OptD Single Method
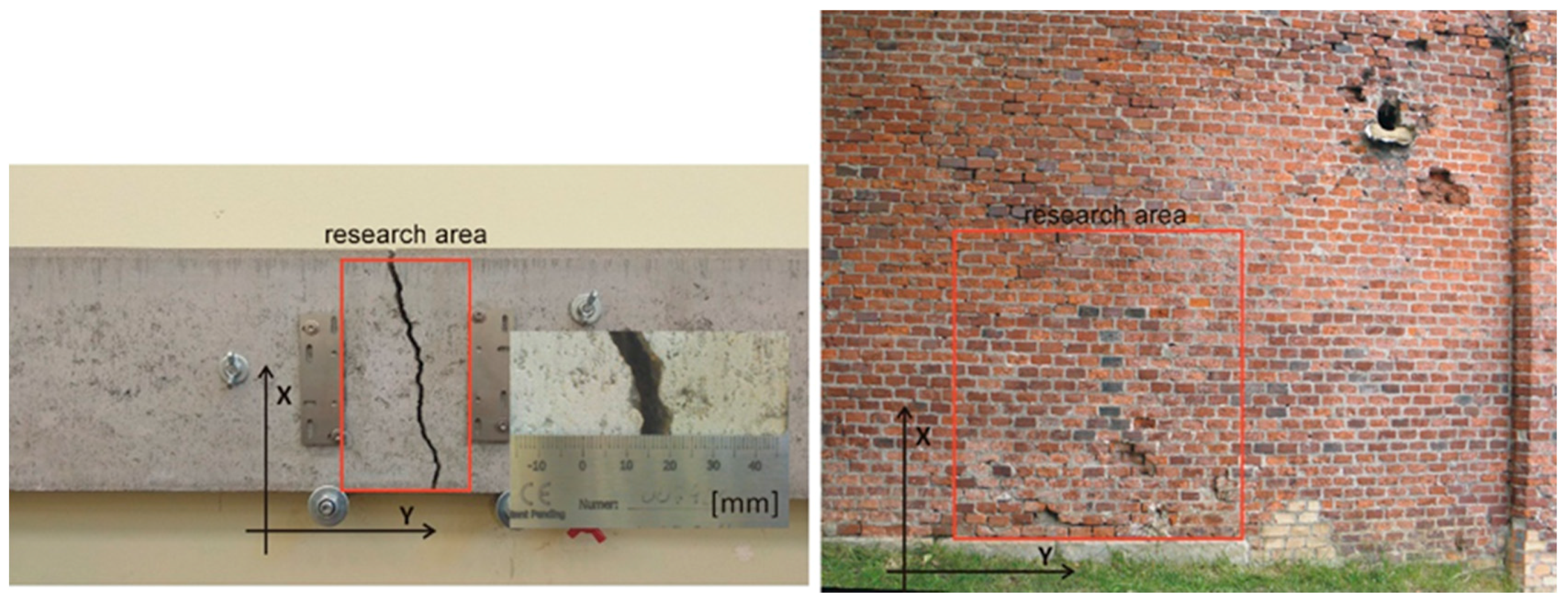
4. Materials and Experiments
4.1. Equipment
4.2. Data Acquisition
4.3. Data Processing
5. Results and Discussion
6. Conclusions
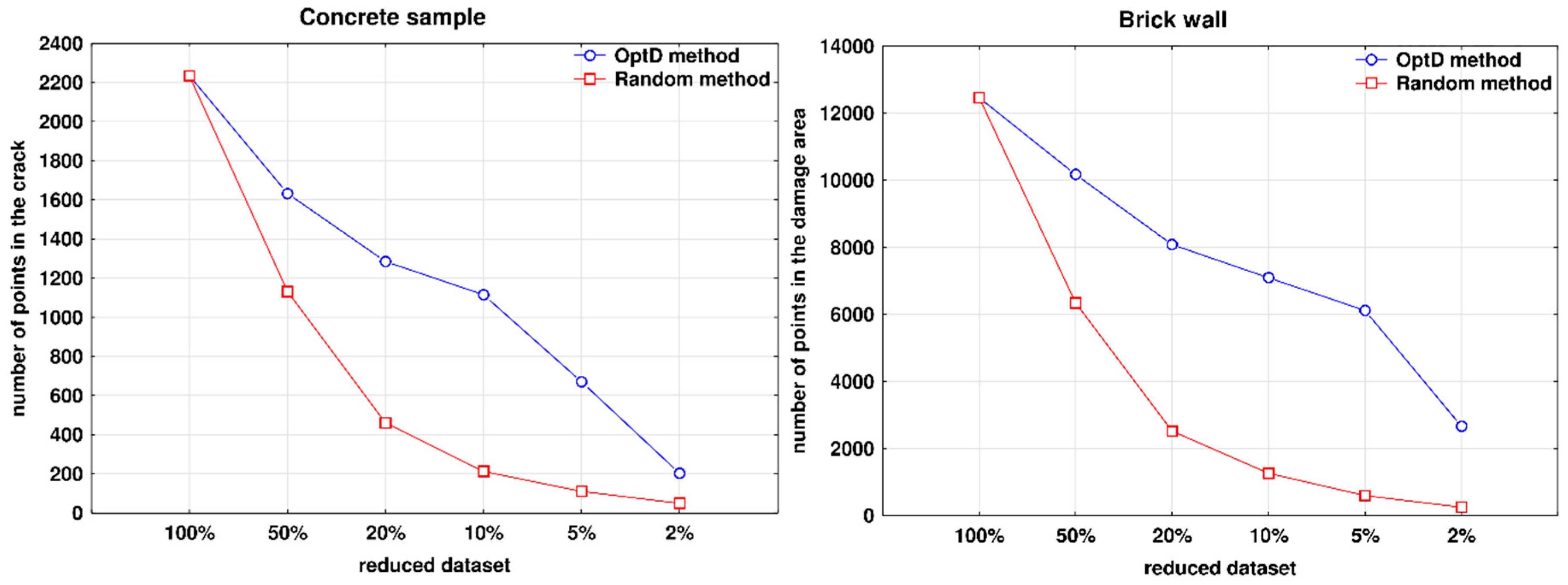
- The results prove that the proposed OptD method is appropriate for reducing the TLS dataset in the diagnostics of buildings and structures;
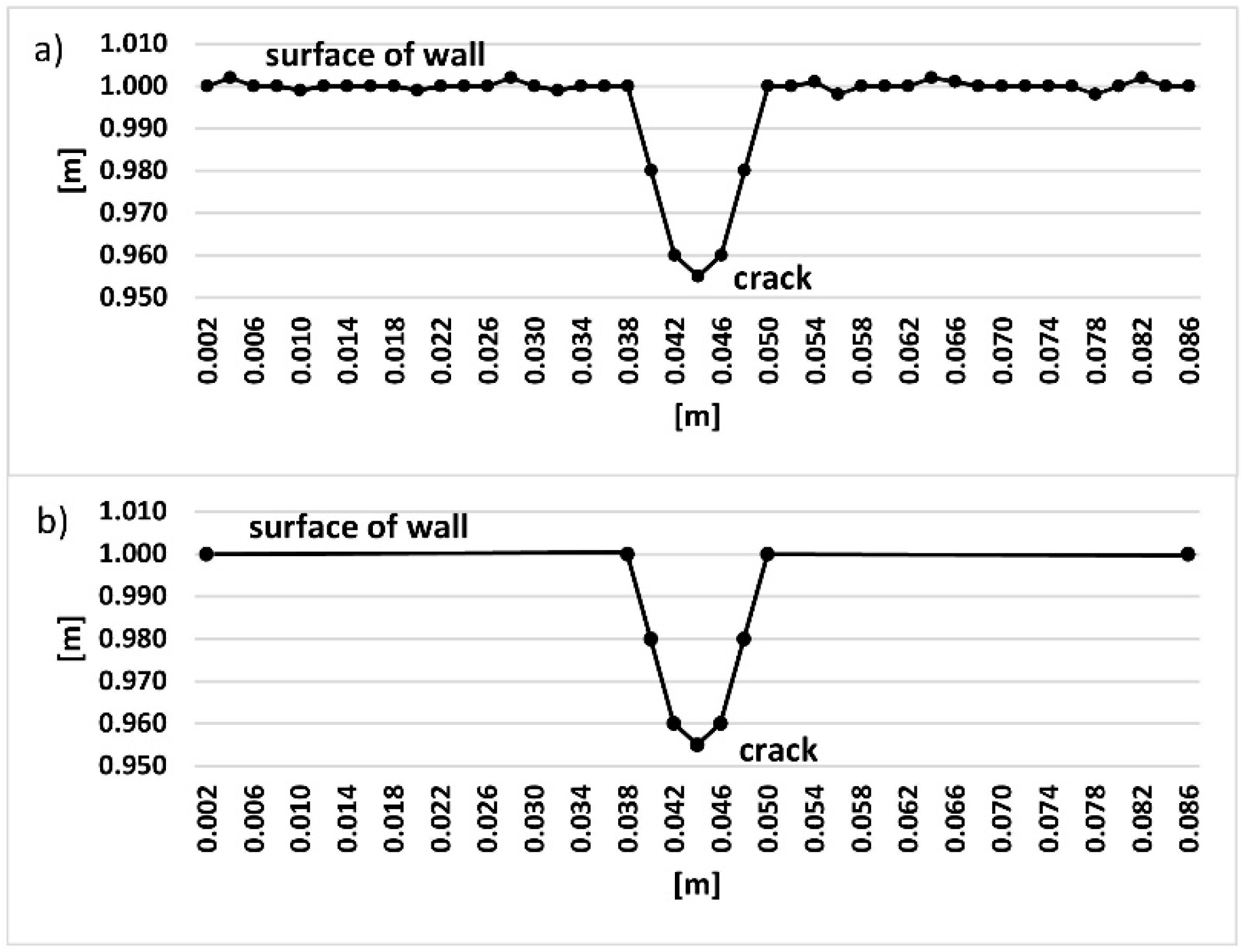
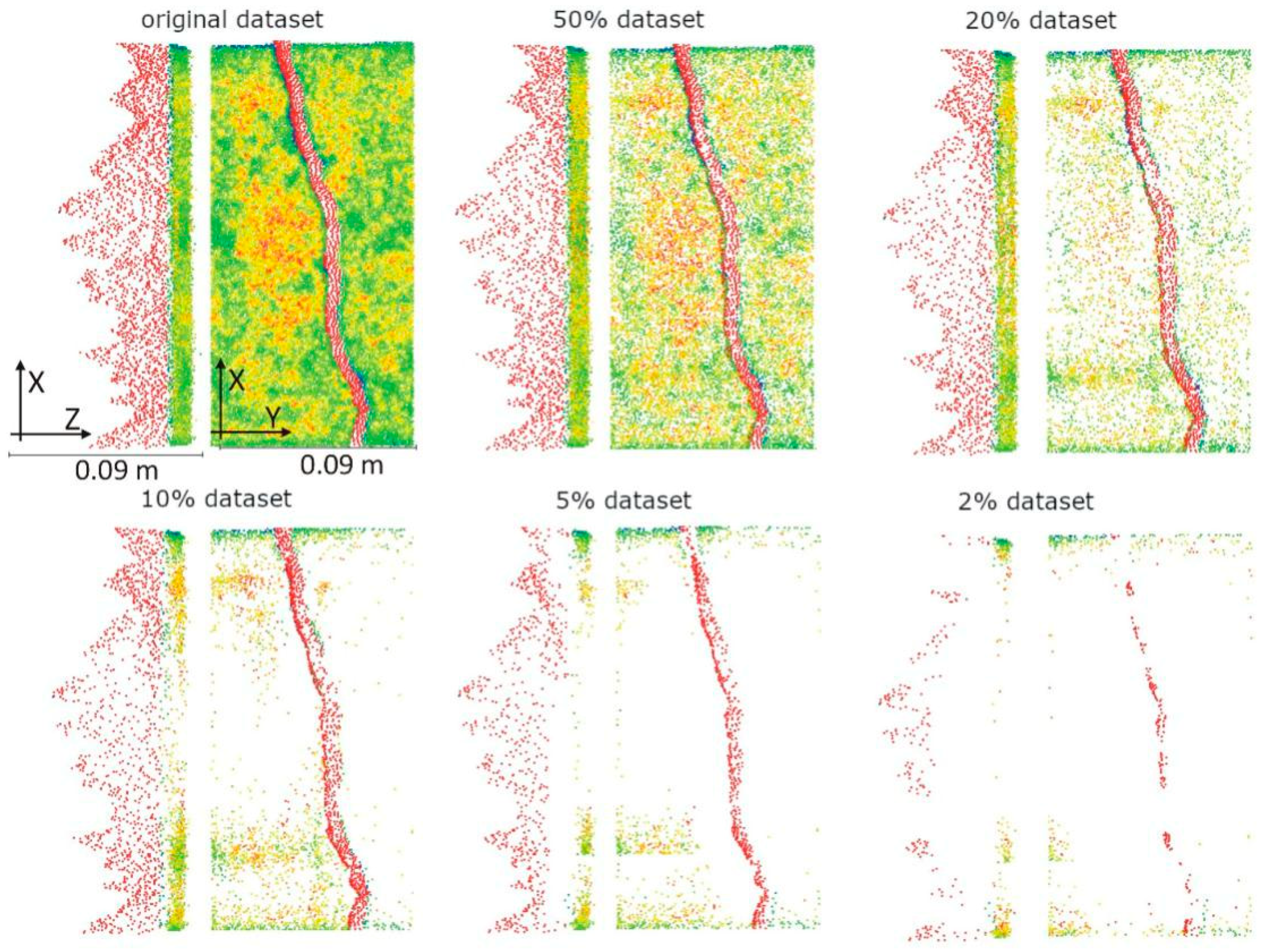
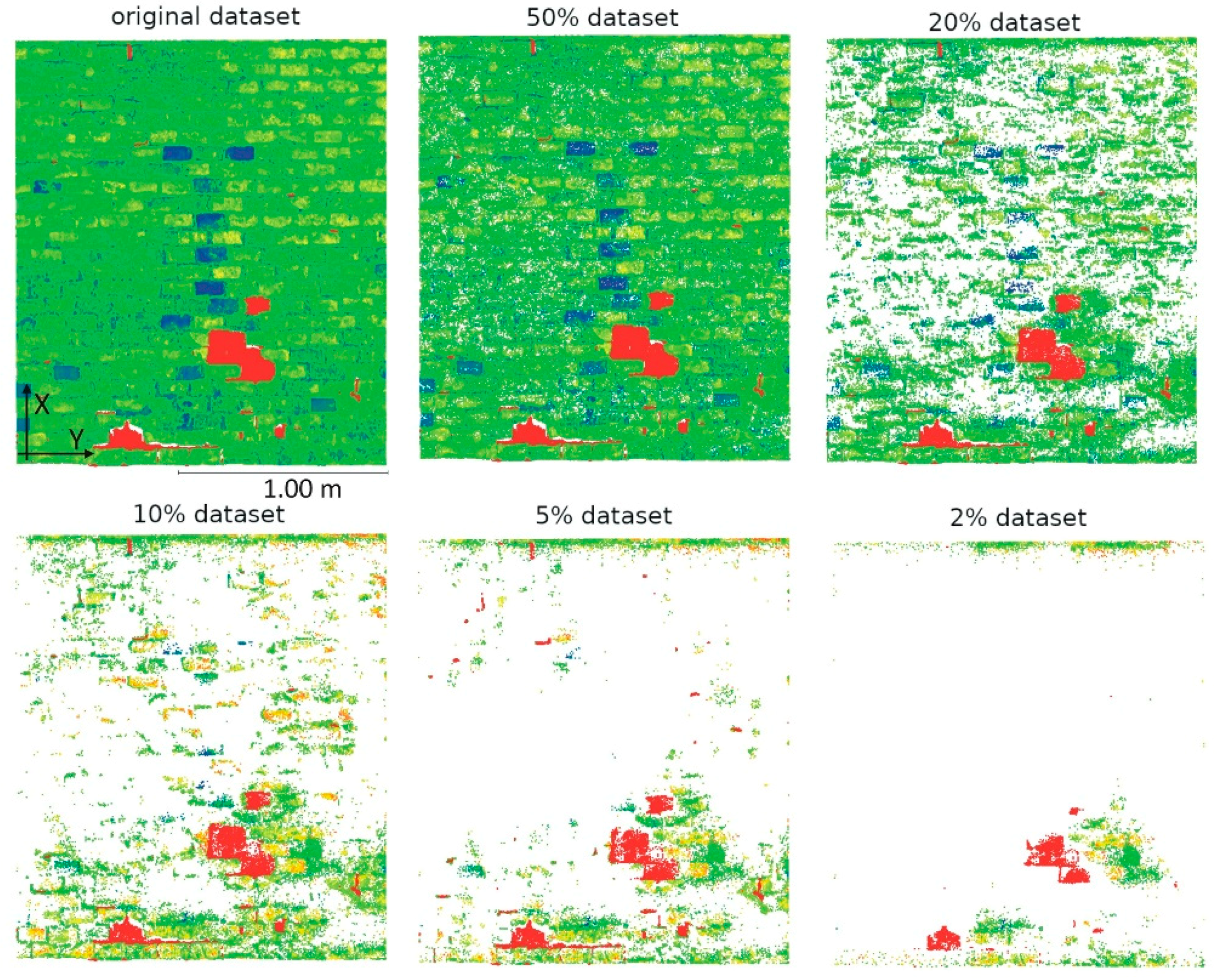
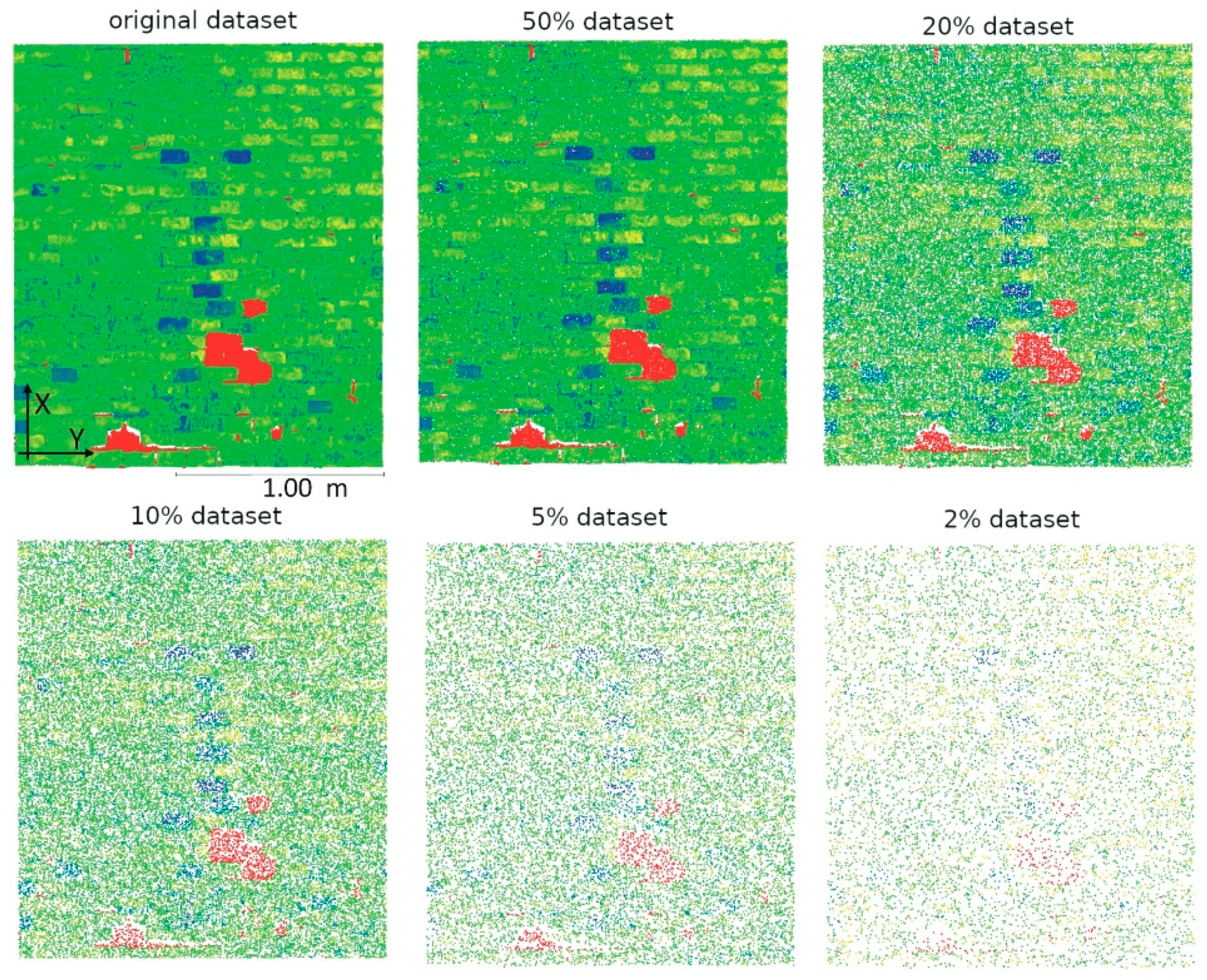
- The down-sampling of the point clouds from the wall measurement using the OptD method allows more points to be left in the detailed part of the scanned object (crack or cavity) than in uncomplicated structures or areas (even surface);
- The OptD method allows total control over the number of points in the dataset after reduction;
- The disadvantage of the proposed OptD method is that it leaves a large number of points at the border research area.
Author Contributions
Funding
Conflicts of Interest
References
- Prantl, H.; Nicholson, L.; Sailer, R.; Hanzer, F.; Juen, I.; Rastner, P. Glacier Snowline Determination from Terrestrial Laser Scanning Intensity Data. Geosciences 2017, 7, 60. [Google Scholar] [CrossRef]
- Barbarella, M.; Fiani, M.; Lugli, A. Uncertainty in terrestrial laser scanner surveys of landslides. Remote Sens. 2017, 9, 113. [Google Scholar] [CrossRef]
- Suchocki, C. Application of terrestrial laser scanner in cliff shores monitoring. Rocz. Ochr. Sr. 2009, 11, 715–725. [Google Scholar]
- Janowski, A.; Szulwic, J.; Tysiąc, P.; Wojtowicz, A. Airborne And Mobile Laser Scanning In Measurements Of Sea Cliffs On The Southern Baltic. Photogramm. Remote Sens. 2015, 2015, 17–24. [Google Scholar] [CrossRef]
- Corso, J.; Roca, J.; Buill, F. Geometric Analysis on Stone Façades with Terrestrial Laser Scanner Technology. Geosciences 2017, 7, 103. [Google Scholar] [CrossRef]
- Ziolkowski, P.; Szulwic, J.; Miskiewicz, M. Deformation Analysis of a Composite Bridge during Proof Loading Using Point Cloud Processing. Sensors 2018, 18, 4332. [Google Scholar] [CrossRef] [PubMed]
- Cabaleiro, M.; Riveiro, B.; Arias, P.; Caamaño, J.C. Algorithm for beam deformation modeling from LiDAR data. Meas. J. Int. Meas. Confed. 2015, 20–31. [Google Scholar] [CrossRef]
- Riveiro, B.; González-Jorge, H.; Varela, M.; Jauregui, D.V. Validation of terrestrial laser scanning and photogrammetry techniques for the measurement of vertical underclearance and beam geometry in structural inspection of bridges. Meas. J. Int. Meas. Confed. 2013, 784–794. [Google Scholar] [CrossRef]
- Suchocki, C.; Katzer, J. TLS technology in brick walls inspection. In Proceedings of the 2018 Baltic Geodetic Congress (BGC Geomatics), Olsztyn, Poland, 21–23 June 2018; IEEE: Olsztyn, Poland, 2018; pp. 359–363. [Google Scholar]
- Suchocki, C.; Jagoda, M.; Obuchovski, R.; Šlikas, D.; Sužiedelytė-Visockienė, J. The properties of terrestrial laser system intensity in measurements of technical conditions of architectural structures. Metrol. Meas. Syst. 2018, 25, 779–792. [Google Scholar] [CrossRef]
- Bobkowska, K.; Szulwic, J.; Tysiąc, P. Bus bays inventory using a terrestrial laser scanning system. MATEC Web Conf. 2017, 122, 1–6. [Google Scholar] [CrossRef]
- Tan, K.; Cheng, X.; Ju, Q.; Wu, S. Correction of Mobile TLS Intensity Data for Water Leakage Spots Detection in Metro Tunnels. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1711–1715. [Google Scholar] [CrossRef]
- Rodríguez-Gonzálvez, P.; Fernández-Palacios, B.J.; Muñoz-Nieto, Á.L.; Arias-Sanchez, P.; Gonzalez-Aguilera, D. Mobile LiDAR system: New possibilities for the documentation and dissemination of large cultural heritage sites. Remote Sens. 2017, 9, 189. [Google Scholar] [CrossRef]
- Rüther, H.; Chazan, M.; Schroeder, R.; Neeser, R.; Held, C.; Walker, S.J.; Matmon, A.; Horwitz, L.K. Laser scanning for conservation and research of African cultural heritage sites: The case study of Wonderwerk Cave, South Africa. J. Archaeol. Sci. 2009, 36, 1847–1856. [Google Scholar] [CrossRef]
- Chiabrando, F.; Lo Turco, M.; Rinaudo, F. Modeling the decay in an hbim starting from 3d point clouds. A followed approach for cultural heritage knowledge. In Proceedings of the 26th International CIPA Symposium 2017, Ottawa, ON, Canada, 28 August–1 September 2017; pp. 605–612. [Google Scholar] [CrossRef]
- Liu, W.; Chen, S.; Hauser, E. LiDAR-based bridge structure defect detection. Exp. Tech. 2011, 35, 27–34. [Google Scholar] [CrossRef]
- Bian, H.; Bai, L.; Chen, S.-E.; Wang, S.-G. Lidar Based Edge-Detection for Bridge Defect Identification. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 11–15 March 2012. [Google Scholar] [CrossRef]
- Suchocki, C.; Katzer, J.; Rapiński, J. Terrestrial Laser Scanner as a Tool for Assessment of Saturation and Moisture Movement in Building Materials. Period. Polytech. Civ. Eng. 2018, 62, 1–6. [Google Scholar] [CrossRef]
- Suchocki, C.; Katzer, J. Terrestrial laser scanning harnessed for moisture detection in building materials—Problems and limitations. Autom. Constr. 2018, 94, 127–134. [Google Scholar] [CrossRef]
- Teza, G.; Galgaro, A.; Moro, F. Contactless recognition of concrete surface damage from laser scanning and curvature computation. NDT E Int. 2009, 42, 240–249. [Google Scholar] [CrossRef]
- Riveiro, B.; Morer, P.; Arias, P.; De Arteaga, I. Terrestrial laser scanning and limit analysis of masonry arch bridges. Constr. Build. Mater. 2011, 25, 1726–1735. [Google Scholar] [CrossRef]
- Kedzierski, M.; Fryskowska, A. Methods of laser scanning point clouds integration in precise 3D building modelling. Meas. J. Int. Meas. Confed. 2015, 221–232. [Google Scholar] [CrossRef]
- Armesto-González, J.; Riveiro-Rodríguez, B.; González-Aguilera, D.; Rivas-Brea, M.T. Terrestrial laser scanning intensity data applied to damage detection for historical buildings. J. Archaeol. Sci. 2010, 37, 3037–3047. [Google Scholar] [CrossRef]
- Laefer, D.F.; Truong-Hong, L.; Carr, H.; Singh, M. Crack detection limits in unit based masonry with terrestrial laser scanning. NDT E Int. 2014, 62, 66–76. [Google Scholar] [CrossRef]
- Du, X.; Zhuo, Y. A point cloud data reduction method based on curvature. In Proceedings of the 2009 IEEE 10th International Conference on Computer-Aided Industrial Design and Conceptual Design: E-Business, Creative Design, Manufacturing—CAID CD’2009, Wenzhou, China, 26–29 November 2009; pp. 914–918. [Google Scholar] [CrossRef]
- Mancini, F.; Castagnetti, C.; Rossi, P.; Dubbini, M.; Fazio, N.L.; Perrotti, M.; Lollino, P. An integrated procedure to assess the stability of coastal rocky cliffs: From UAV close-range photogrammetry to geomechanical finite element modeling. Remote Sens. 2017, 9, 1235. [Google Scholar] [CrossRef]
- Orts-Escolano, S.; Morell, V.; Garcia-Rodriguez, J.; Cazorla, M. Point cloud data filtering and downsampling using growing neural gas. In Proceedings of the International Joint Conference on Neural Networks, Dallas, TX, USA, 4–9 August 2013. [Google Scholar] [CrossRef]
- Moreno, C.; Li, M. A comparative study of filtering methods for point clouds in real-time video streaming. In Lecture Notes in Engineering and Computer Science, Proceedings of the World Congress on Engineering and Computer Science 2016, San Francisco, USA, 19–21 October 2016; Newswood Limited: Hong Kong, China, 2016; ISBN 978-988-14047-1-8. [Google Scholar]
- Jang, J.; Hwang, S.; Park, K. Intensity control of a phase-shift based laser scanner for reducing distance errors caused by different surface reflectivity. In Proceedings of the International Conference on Sensing Technology ICST, Palmerston North, New Zealand, 28 November–1 December 2011. [Google Scholar] [CrossRef]
- San José Alonso, J.I.; Martínez Rubio, J.; Fernández Martín, J.J.; García Fernández, J. Comparing Time-of-Flight and Phase-Shift. the Survey of the Royal Pantheon in the Basilica of San Isidoro (León). ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXVIII-5/W16, 377–385. [Google Scholar] [CrossRef]
- Jacobs, G. Understanding Spot Size for Laser Scanning. Professional Surveyor Magazine, October 2006. [Google Scholar]
- Crespo, C.; Armesto, J.; González-Aguilera, D.; Arias, P. Damage Detection on Historical Buildings Using Unsupervised Classification Techniques. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, XXXVIII, 184–188. [Google Scholar]
- Rabah, M.; Elhattab, A.; Fayad, A. Automatic concrete cracks detection and mapping of terrestrial laser scan data. NRIAG J. Astron. Geophys. 2013, 250–255. [Google Scholar] [CrossRef]
- Lin, Y.-J.; Benziger, R.R.; Habib, A. Planar-Based Adaptive Down-Sampling of Point Clouds. Photogramm. Eng. Remote Sens. 2016, 82, 955–966. [Google Scholar] [CrossRef]
- Błaszczak-Bąk, W.; Sobieraj-Żłobińska, A.; Kowalik, M. The OptD-multi method in LiDAR processing. Meas. Sci. Technol. 2017, 28, 7500–7509. [Google Scholar] [CrossRef]
- Błaszczak-Bąk, W. New optimum dataset method in LiDAR processing. Acta Geodyn. Geomater. 2016, 13, 381–388. [Google Scholar] [CrossRef]
- Błaszczak-Bąk, W.; Koppanyi, Z.; Toth, C. Reduction Method for Mobile Laser Scanning Data. ISPRS Int. J. Geo-Inf. 2018, 7, 285. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Sabel, D.; Wagner, W. Optimisation of global grids for high-resolution remote sensing data. Comput. Geosci. 2014, 72, 84–93. [Google Scholar] [CrossRef]
- Gosciewski, D. Selection of interpolation parameters depending on the location of measurement points. GIScience Remote Sens. 2013, 50, 515–526. [Google Scholar] [CrossRef]
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Can. Cartogr. 1973, 10, 112–122. [Google Scholar] [CrossRef]
- Visvalingam, M.; Whyatt, J.D. Line generalisation by repeated elimination of points. Cartogr. J. 1993, 30, 46–51. [Google Scholar] [CrossRef]
- Opheim, H. Smoothing a digitized curve by data reduction methods. In Eurographics Conference Proceedings; Encarnacao, J.L., Ed.; The Eurographics Association: Munich, Germany, 1981; pp. 127–135. [Google Scholar]
- CloudCompare User Manual, Version 2.6.1. 2018. Available online: www.cloudcompare.org (accessed on 5 January 2019).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Number of Points | No Damage (di ≤ 5 mm) | Damage (di > 5 mm) | |||||
|---|---|---|---|---|---|---|---|
| Number of Points | % Original Dataset | Relation to the Original Dataset | Number of Points | % Original Dataset | Relation to the Original Dataset | ||
| original dataset | 32938 | 30704 | 93.2 | 100% | 2234 | 6.8 | 100% |
| 50% dataset | 16352 | 14720 | 90.0 | 47.9% | 1632 | 10.0 | 73.1% |
| 20% dataset | 6594 | 5310 | 80.5 | 17.3% | 1284 | 19.5 | 57.5% |
| 10% dataset | 3316 | 2201 | 66.4 | 7.2% | 1115 | 33.6 | 49.9% |
| 5% dataset | 1653 | 983 | 59.5 | 3.2% | 670 | 40.5 | 30.0% |
| 2% dataset | 659 | 456 | 69.2 | 1.5% | 203 | 30.8 | 9.1% |
| Total Number of Points | No Damage (di ≤ 5 mm) | Damage (di > 5 mm) | |||||
|---|---|---|---|---|---|---|---|
| Number of Points | % Original Dataset | Relation to the Original Dataset | Number of Points | % Original Dataset | Relation to the Original Dataset | ||
| original dataset | 32938 | 30704 | 93.2 | 100% | 2234 | 6.8 | 100% |
| 50% dataset | 16352 | 15221 | 93.1 | 49.6% | 1131 | 6.9 | 50.6% |
| 20% dataset | 6594 | 6134 | 93.0 | 20.0% | 460 | 7.0 | 20.6% |
| 10% dataset | 3316 | 3104 | 93.6 | 10.1% | 212 | 6.4 | 9.5% |
| 5% dataset | 1653 | 1543 | 93.3 | 5.0% | 110 | 6.7 | 4.9% |
| 2% dataset | 659 | 610 | 92.6 | 2.0% | 49 | 7.4 | 2.2% |
| Total Number of Points | No Damage (di ≤ 15 mm) | Damage (di > 15 mm) | |||||
|---|---|---|---|---|---|---|---|
| Number of Points | % Original Dataset | Relation to the Original Dataset | Number of Points | % Original Dataset | Relation to the Original Dataset | ||
| original dataset | 456556 | 444096 | 97.3 | 100% | 12460 | 2.7 | 100% |
| 50% dataset | 229167 | 218999 | 95.6 | 49.3% | 10168 | 4.4 | 81.6% |
| 20% dataset | 91514 | 83434 | 91.2 | 18.8% | 8080 | 8.8 | 64.8% |
| 10% dataset | 45569 | 38478 | 84.4 | 8.7% | 7091 | 15.6 | 56.9% |
| 5% dataset | 22661 | 16547 | 73.0 | 3.7% | 6114 | 27.0 | 49.1% |
| 2% dataset | 9182 | 6520 | 71.0 | 1.5% | 2662 | 29.0 | 21.4% |
| Total Number of Points | No Damage (di ≤ 15 mm) | Damage (di > 15 mm) | |||||
|---|---|---|---|---|---|---|---|
| Number of Points | % Original Dataset | Relation to the Original Dataset | Number of Points | % Original Dataset | Relation to the Original Dataset | ||
| original dataset | 456556 | 444096 | 97.3 | 100% | 12460 | 2.7 | 100% |
| 50% dataset | 229167 | 222827 | 97.2 | 50.2% | 6340 | 2.8 | 50.9% |
| 20% dataset | 91514 | 88997 | 97.2 | 20.0% | 2517 | 2.8 | 20.2% |
| 10% dataset | 45569 | 44312 | 97.2 | 10.0% | 1257 | 2.8 | 10.1% |
| 5% dataset | 22661 | 22063 | 97.4 | 5.0% | 598 | 2.6 | 4.8% |
| 2% dataset | 9182 | 8933 | 97.3 | 2.0% | 249 | 2.7 | 2.0% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suchocki, C.; Błaszczak-Bąk, W. Down-Sampling of Point Clouds for the Technical Diagnostics of Buildings and Structures. Geosciences 2019, 9, 70. https://doi.org/10.3390/geosciences9020070
Suchocki C, Błaszczak-Bąk W. Down-Sampling of Point Clouds for the Technical Diagnostics of Buildings and Structures. Geosciences. 2019; 9(2):70. https://doi.org/10.3390/geosciences9020070
Chicago/Turabian StyleSuchocki, Czesław, and Wioleta Błaszczak-Bąk. 2019. "Down-Sampling of Point Clouds for the Technical Diagnostics of Buildings and Structures" Geosciences 9, no. 2: 70. https://doi.org/10.3390/geosciences9020070
APA StyleSuchocki, C., & Błaszczak-Bąk, W. (2019). Down-Sampling of Point Clouds for the Technical Diagnostics of Buildings and Structures. Geosciences, 9(2), 70. https://doi.org/10.3390/geosciences9020070