GIS Framework for Spatiotemporal Mapping of Urban Flooding



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
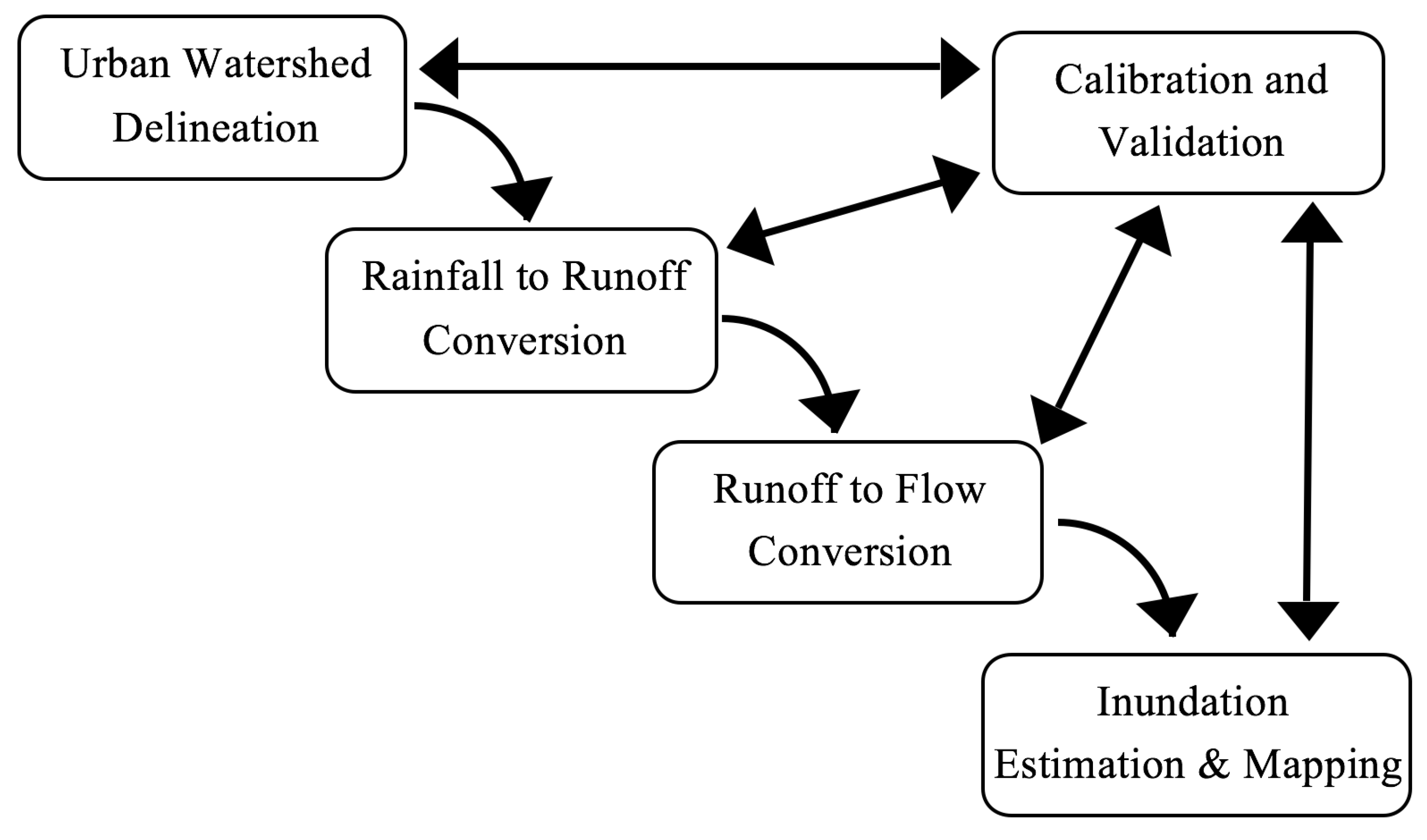
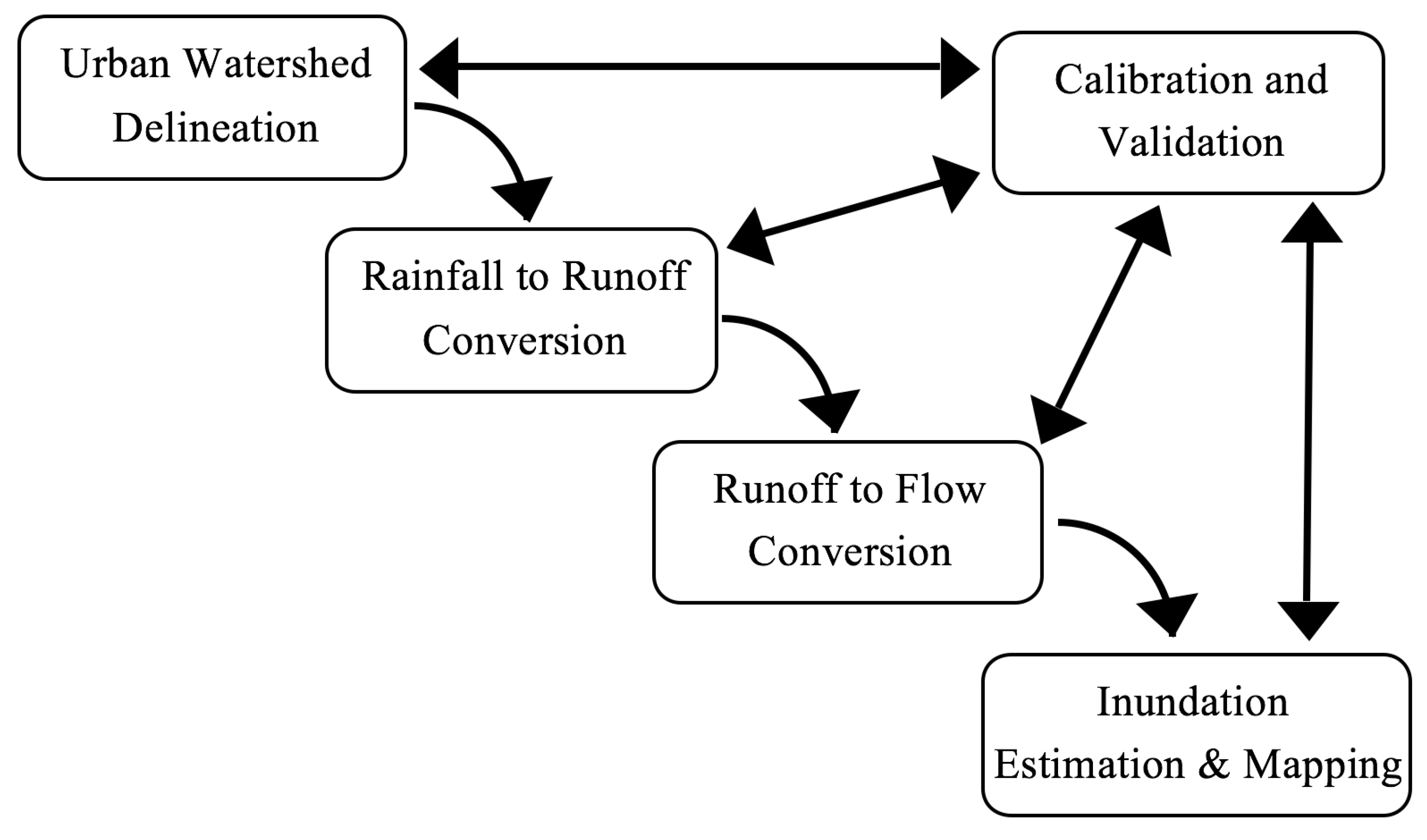
2. GIS Framework Development
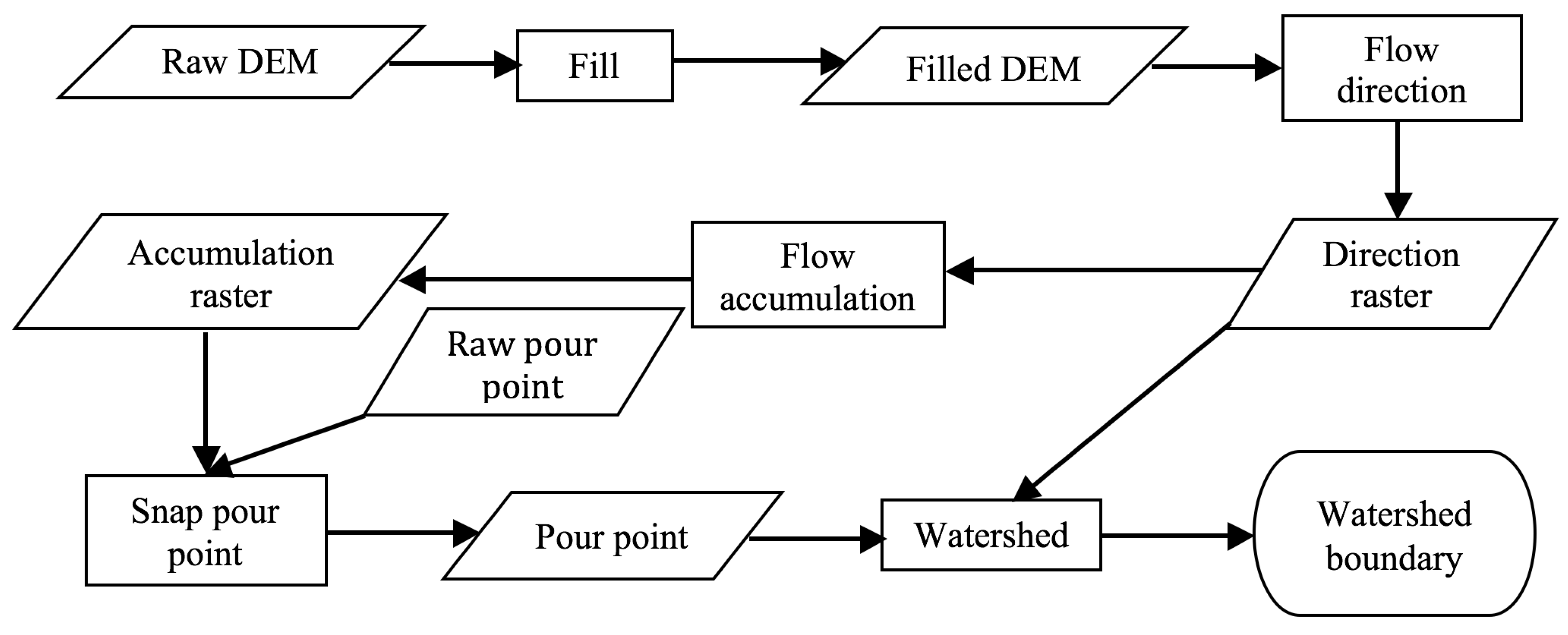
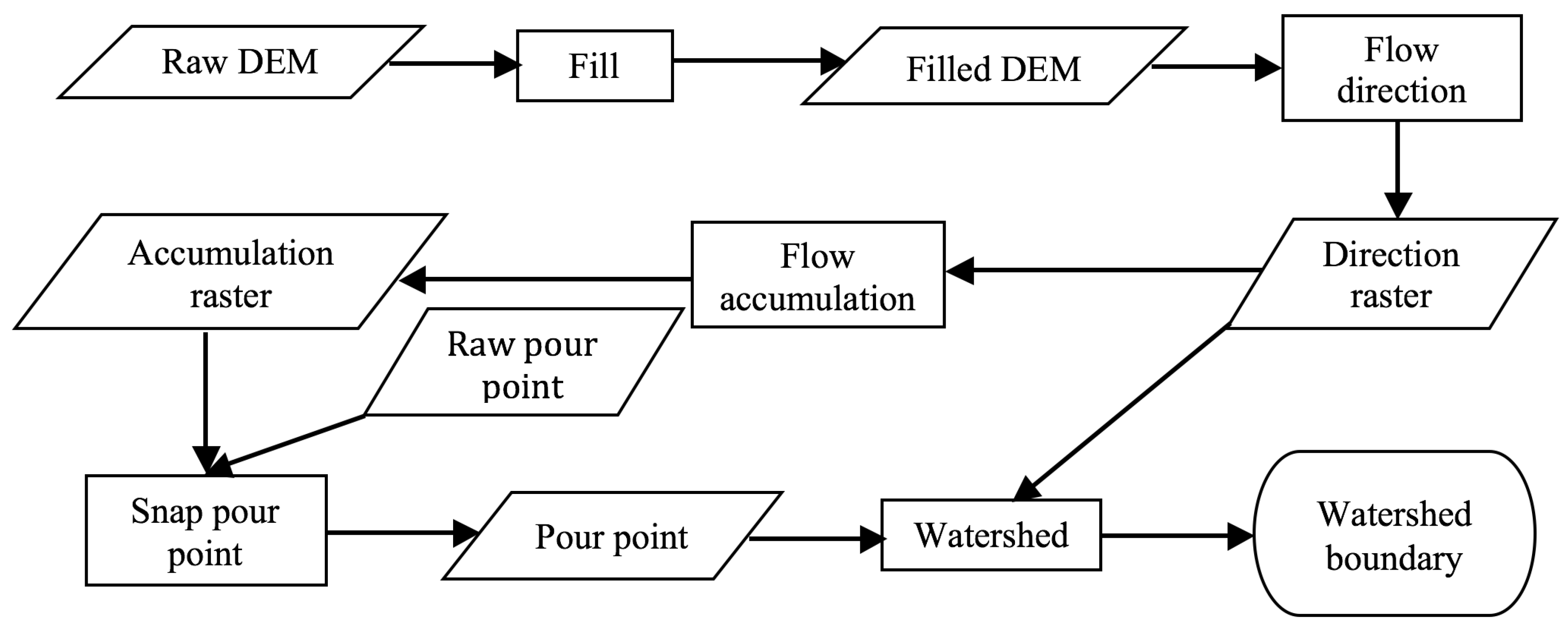
2.1. Urban Watershed Delineation
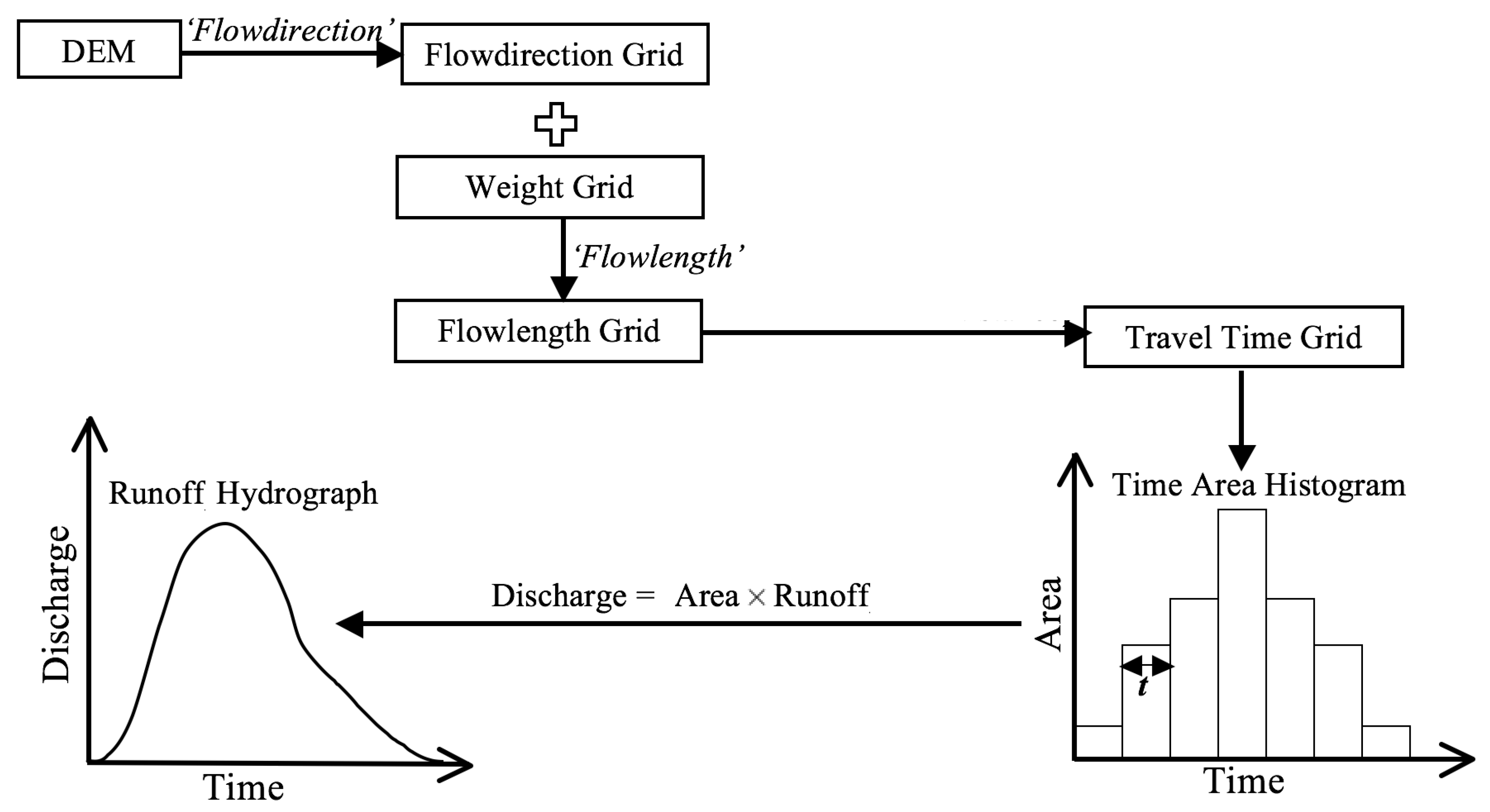
2.2. Rainfall to Runoff Conversion
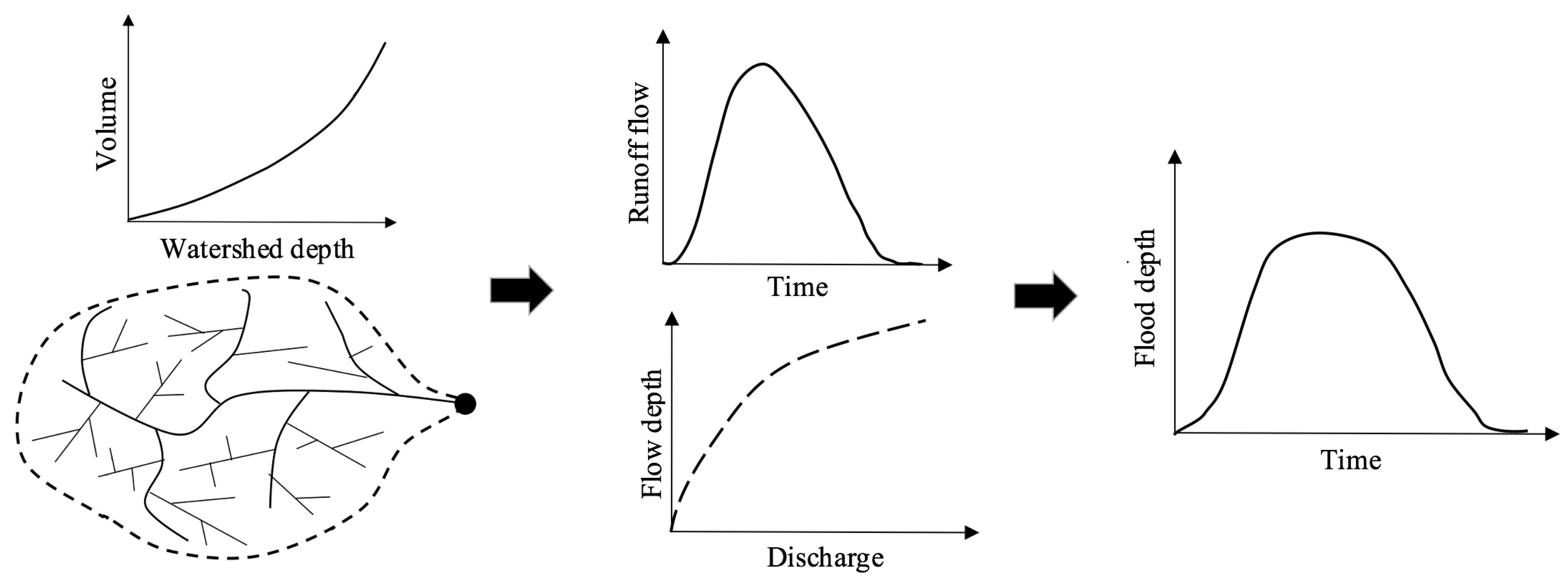
2.3. Runoff to Flow Conversion
2.4. Inundation Estimation and Mapping
2.5. Calibration and Validation
3. Case Studies
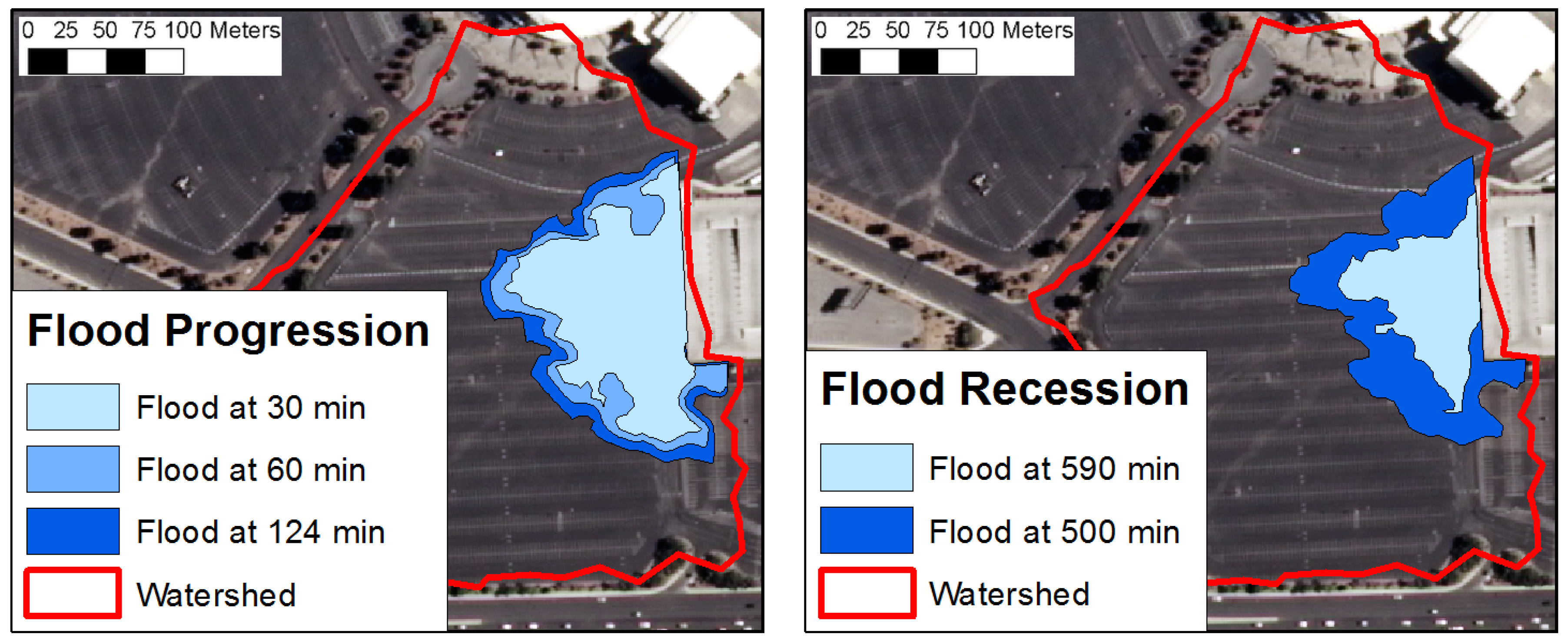
3.1. GIS Framework Testing at Blacklot Study
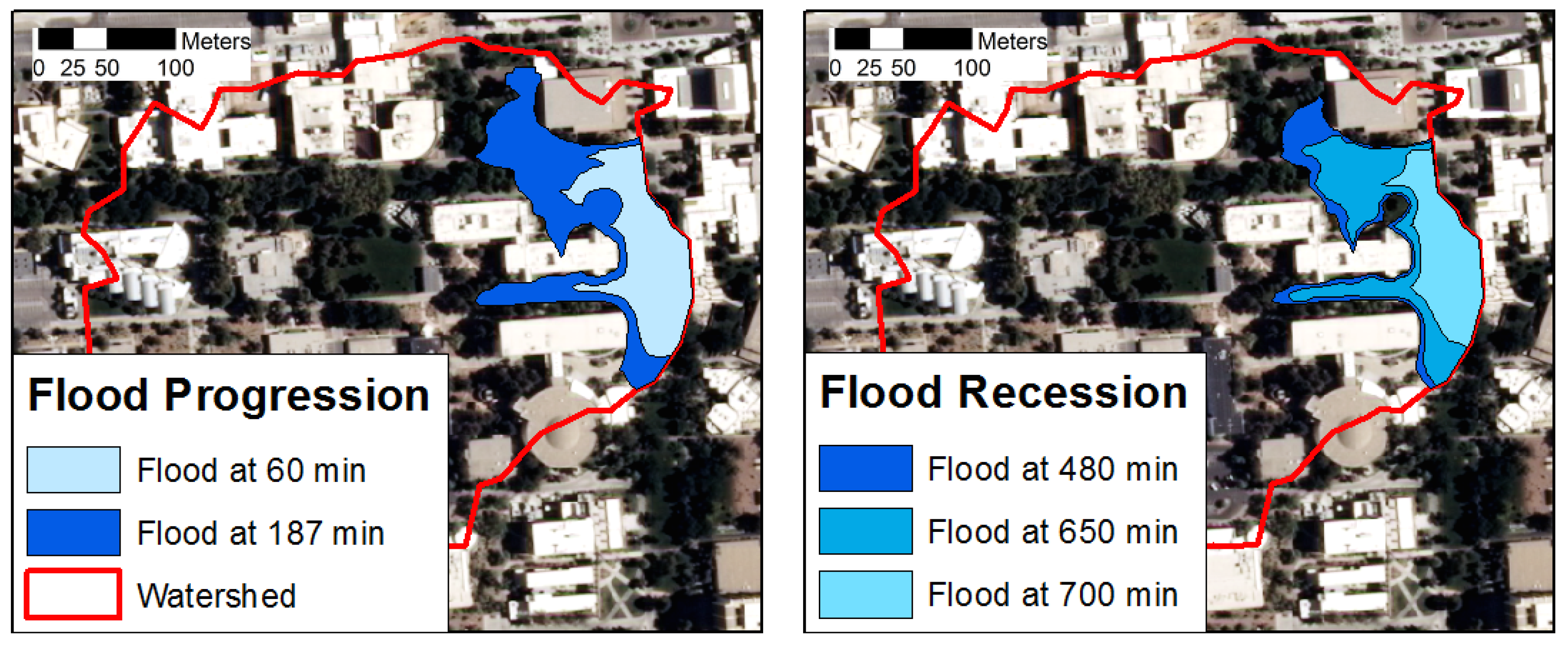
3.2. GIS Framework Testing at East Mall Study Site
4. Discussion
5. Summary and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jing, Z. GIS based urban flood inundation modeling. In Proceedings of the 2010 Second WRI Global Congress on Intelligent Systems (GCIS), Wuhan, China, 16–17 December 2010; Volume 2, pp. 140–143. [Google Scholar]
- Zerger, A.; Smith, D.; Hunter, G.; Jones, S. Riding the storm: A comparison of uncertainty modelling techniques for storm surge risk management. Appl. Geogr. 2002, 22, 307–330. [Google Scholar] [CrossRef]
- Genovese, E. A Methodological Approach to Land Use-Based Flood Damage Assessment in Urban Areas: Prague Case Study; Technical EUR Reports; European Commission: Luxembourg, 2006. [Google Scholar]
- Feyen, J.; Shannon, K.; Neville, M. Water and Urban Development Paradigms: Towards an Integration of Engineering, Design and Management Approaches; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Chen, J.; Hill, A.A.; Urbano, L.D. A GIS-based model for urban flood inundation. J. Hydrol. 2009, 373, 184–192. [Google Scholar] [CrossRef]
- Kilgore, J.L. Development and Evaluation of a GIS-Based Spatially Distributed Unit Hydrograph Model. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 1997. [Google Scholar]
- Shokoohi, A.R. A new approach for isochrone mapping in one dimensional flow for using in time area method. J. Appl. Sci. 2008, 8, 516–521. [Google Scholar] [CrossRef]
- Urbonas, B. Stormwater Runoff Modeling; Is it as Accurate asWe Think? In Proceedings of the International Conference on Urban Runoff Modeling: Intelligent Modeling to Improve Stormwater Management, Arcata, CA, USA, 22–27 July 2007; p. 12. [Google Scholar]
- Leandro, J.; Chen, A.S.; Djordjević, S.; Savić, D.A. Comparison of 1D/1D and 1D/2D coupled (sewer/surface) hydraulic models for urban flood simulation. J. Hydraul. Eng. 2009, 135, 495–504. [Google Scholar] [CrossRef]
- Fraga, I.; Cea, L.; Puertas, J. Validation of a 1D-2D dual drainage model under unsteady part-full and surcharged sewer conditions. Urban Water J. 2017, 14, 74–84. [Google Scholar] [CrossRef]
- Hsu, M.H.; Chen, S.H.; Chang, T.J. Inundation simulation for urban drainage basin with storm sewer system. J. Hydrol. 2000, 234, 21–37. [Google Scholar] [CrossRef]
- Chen, A.S.; Evans, B.; Djordjević, S.; Savić, D.A. A coarse-grid approach to representing building blockage effects in 2D urban flood modelling. J. Hydrol. 2012, 426, 1–16. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, A.S.; Fu, G.; Djordjević, S.; Zhang, C.; Savić, D.A. An integrated framework for high-resolution urban flood modelling considering multiple information sources and urban features. Environ. Model. Softw. 2018, 107, 85–95. [Google Scholar] [CrossRef]
- Ghimire, B.; Chen, A.S.; Guidolin, M.; Keedwell, E.C.; Djordjević, S.; Savić, D.A. Formulation of a fast 2D urban pluvial flood model using a cellular automata approach. J. Hydroinform. 2013, 15, 676–686. [Google Scholar] [CrossRef]
- Bisht, D.S.; Chatterjee, C.; Kalakoti, S.; Upadhyay, P.; Sahoo, M.; Panda, A. Modeling urban floods and drainage using SWMM and MIKE URBAN: A case study. Nat. Hazards 2016, 84, 749–776. [Google Scholar] [CrossRef]
- Ellis, J.B.; Viavattene, C. Sustainable urban drainage system modeling for managing urban surface water flood risk. CLEAN Soil Air Water 2014, 42, 153–159. [Google Scholar] [CrossRef]
- Zhang, Y.; McBroom, M.W.; Grogan, J.; Hung, I. Snapping a Pour Point for Watershed Delineation in ArcGIS Hydrologic Analysis. The Forestry Source, 14 September 2011. [Google Scholar]
- Horritt, M.; Bates, P. Effects of spatial resolution on a raster based model of flood flow. J. Hydrol. 2001, 253, 239–249. [Google Scholar] [CrossRef]
- Werner, M. Impact of grid size in GIS based flood extent mapping using a 1D flow model. Phys. Chem. Earth Part B Hydrol. Oceans Atmos. 2001, 26, 517–522. [Google Scholar] [CrossRef]
- Chen, J.; Hill, A. Modeling urban flood hazard: just how much does dem resolution matter? Pap. Proc. Appl. Geogr. Conf. 2007, 30, 372. [Google Scholar]
- Prodanović, D.; Stanić, M.; Milivojević, V.; Simić, Z.; Arsić, M. DEM-based GIS algorithms for automatic creation of hydrological models data. J. Serb. Soc. Comput. Mech. 2009, 3, 64–85. [Google Scholar]
- National Weather Service. Unit Hydrograph (UHG) Technical Manual. 2005. Available online: http://www.nohrsc.noaa.gov/technology/gis/uhg_manual.html (accessed on 7 September 2013).
- Lindsay, J.B.; Rothwell, J.J.; Davies, H. Mapping outlet points used for watershed delineation onto DEM-derived stream networks. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Craig, J.; Liu, G.; Soulis, E. Runoff—Infiltration partitioning using an upscaled Green—AMPT solution. Hydrol. Process. 2010, 24, 2328–2334. [Google Scholar] [CrossRef]
- Beven, K.; Robert, E. Horton’s perceptual model of infiltration processes. Hydrol. Process. 2004, 18, 3447–3460. [Google Scholar] [CrossRef]
- Stall, J.B. Storm Sewer Design—An Evaluation of the RRL Method; US Government Printing Office: Washington, DC, USA, 1972; Volume 1.
- Cronshey, R. Urban Hydrology for Small Watersheds; Technical Report; US Department of Agriculture, Soil Conservation Service, Engineering Division: Washington, DC, USA, 1986.
- Yuan, Y.; Nie, W.; McCutcheon, S.C.; Taguas, E.V. Initial abstraction and curve numbers for semiarid watersheds in Southeastern Arizona. Hydrol. Process. 2014, 28, 774–783. [Google Scholar] [CrossRef]
- Ponce, V.M.; Hawkins, R.H. Runoff curve number: Has it reached maturity? J. Hydrol. Eng. 1996, 1, 11–19. [Google Scholar] [CrossRef]
- Olivera, F.; Maidment, D. Geographic Information Systems (GIS)-based spatially distributed model for runoff routing. Water Resour. Res. 1999, 35, 1155–1164. [Google Scholar] [CrossRef]
- De Smedt, F.; Liu, Y.; Gebremeskel, S. Hydrologic Modeling on a Catchment Scale Using GIS and Remote Sensed Land Use Information; WIT Press: Southampton, UK, 2000; pp. 295–304. [Google Scholar]
- Ashour, R.A. Description of a simplified GIS-based surface water model for an arid catchment in Jordan. In Proceedings of the 20th Annual International ESRI User Conference, San Diengo, CA, USA, 8–12 June 2000; pp. 26–30. [Google Scholar]
- Usul, N.; Yilmaz, M. Estimation of instantaneous unit hydrograph with Clark’s Technique in GIS. In Proceedings of the 2002 ESRI International User Conference, San Diego, CA, USA, 8–12 July 2002; ESRI On-Line. Available online: http://proceedings.esri.com/library/userconf/proc02 (accessed on 15 December 2018).
- Thompson, D.B. The Rational Method; Civil Engineering Deptartment, Texas Tech University: Lubbock, TX, USA, 2006. [Google Scholar]
- Sorrell, R.C.; Hamilton, D.A. Computing Flood Discharges for Small Ungaged Watersheds; Geological and Land Management Division, Michigan Department of Environmental Quality: Lansing, MI, USA, 2003.
- Wang, Y.; He, B.; Takase, K. Effects of temporal resolution on hydrological model parameters and its impact on prediction of river discharge/Effets de la résolution temporelle sur les paramètres d’un modèle hydrologique et impact sur la prévision de l’écoulement en rivière. Hydrol. Sci. J. 2009, 54, 886–898. [Google Scholar] [CrossRef]
- Ahmad, M.M.; Ghumman, A.R.; Ahmad, S. Estimation of Clark’s instantaneous unit hydrograph parameters and development of direct surface runoff hydrograph. Water Resour. Manag. 2009, 23, 2417–2435. [Google Scholar] [CrossRef]
- Ahmad, S.; Simonovic, S.P. Developing runoff hydrograph using artificial neural networks. In Proceedings of the ASCE EWRI Conference-Bridging the Gap: Meeting the World’s Water and Environmental Resources Challenges, Orlando, FL, USA, 20–24 May 2001. [Google Scholar]
- Ahmad, S.; Simonovic, S.P. An artificial neural network model for generating hydrograph from hydro-meteorological parameters. J. Hydrol. 2005, 315, 236–251. [Google Scholar] [CrossRef]
- Guo, J.C.; MacKenzie, K.A.; Mommandi, A. Design of Street Sump Inlet. J. Hydraul. Eng. 2009, 135, 1000–1004. [Google Scholar] [CrossRef]
- UDFCD. Urban Storm Drainage Criteria Manual-Volume 1: Management, Hydrology, and Hydraulics. 2002. Available online: http://udfcd.org/volume-one (accessed on 15 December 2013).
- Brath, A.; Montanari, A.; Moretti, G. Assessing the effect on flood frequency of land use change via hydrological simulation (with uncertainty). J. Hydrol. 2006, 324, 141–153. [Google Scholar] [CrossRef]
- Inam, A.; Adamowski, J.; Prasher, S.; Albano, R. Parameter estimation and uncertainty analysis of the Spatial Agro Hydro Salinity Model (SAHYSMOD) in the semi-arid climate of Rechna Doab, Pakistan. Environ. Model. Softw. 2017, 94, 186–211. [Google Scholar] [CrossRef]
- Albano, R.; Sole, A.; Adamowski, J.; Perrone, A.; Inam, A. Using FloodRisk GIS freeware for uncertainty analysis of direct economic flood damages in Italy. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 220–229. [Google Scholar] [CrossRef]
- ESRI. What Is a Python Add-In? 2019. Available online: http://desktop.arcgis.com/en/arcmap/latest/analyze/python-addins/what-is-a-python-add-in.htm (accessed on 13 January 2019).
- Albano, R.; Mancusi, L.; Sole, A.; Adamowski, J. FloodRisk: A collaborative, free and open-source software for flood risk analysis. Geomat. Natl. Hazards Risk 2017, 8, 1812–1832. [Google Scholar] [CrossRef]
- NRCS. Soil Survey Geographic Database (SSURGO). 2013. Available online: http://websoilsurvey.sc.egov.usda.gov (accessed on 9 September 2013).
- USGS. National Land Cover Dataset (NLCD). 2011. Available online: http://www.mrlc.gov (accessed on 8 September 2013).
- Pridgon, F. Flash Floods Hit UNLV, Many Stranded. 2012. Available online: https://www.unlvfreepress.com/flash-floods-hit-unlv-many-stranded/ (accessed on 7 September 2013).
- Goulden, T.; Hopkinson, C.; Jamieson, R.; Sterling, S. Sensitivity of watershed attributes to spatial resolution and interpolation method of LiDAR DEMs in three distinct landscapes. Water Resour. Res. 2014, 50, 1908–1927. [Google Scholar] [CrossRef]
- Aronica, G.; Freni, G.; Oliveri, E. Uncertainty analysis of the influence of rainfall time resolution in the modelling of urban drainage systems. Hydrol. Process. 2005, 19, 1055–1071. [Google Scholar] [CrossRef]
- Guo, J.C.Y.; MacKenzie, K. Hydraulic Efficiency of Grate and Curb-Opening Inlets under Clogging Effect; Technical Report; Colorado Department of Transportation, DTD Applied Research and Innovation Branch: Denver, CO, USA, 2012.
- Ghaffari, G. The impact of DEM resolution on runoff and sediment modelling results. Res. J. Environ. Sci. 2011, 5, 691–702. [Google Scholar] [CrossRef]
- Formoso, J.A. Local Businesses on the Rebound after ‘The Great Flood’. 2013. Available online: https://www.unlvfreepress.com/local-businesses-on-the-rebound-after-the-great-flood/ (accessed on 5 September 2013).




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abedin, S.J.H.; Stephen, H. GIS Framework for Spatiotemporal Mapping of Urban Flooding. Geosciences 2019, 9, 77. https://doi.org/10.3390/geosciences9020077
Abedin SJH, Stephen H. GIS Framework for Spatiotemporal Mapping of Urban Flooding. Geosciences. 2019; 9(2):77. https://doi.org/10.3390/geosciences9020077
Chicago/Turabian StyleAbedin, Sayed Joinal Hossain, and Haroon Stephen. 2019. "GIS Framework for Spatiotemporal Mapping of Urban Flooding" Geosciences 9, no. 2: 77. https://doi.org/10.3390/geosciences9020077
APA StyleAbedin, S. J. H., & Stephen, H. (2019). GIS Framework for Spatiotemporal Mapping of Urban Flooding. Geosciences, 9(2), 77. https://doi.org/10.3390/geosciences9020077