Advances in Snow Hydrology Using a Combined Approach of GNSS In Situ Stations, Hydrological Modelling and Earth Observation—A Case Study in Canada

 , , , ,
, , , ,
Abstract
1. Introduction
2. Materials and Methods
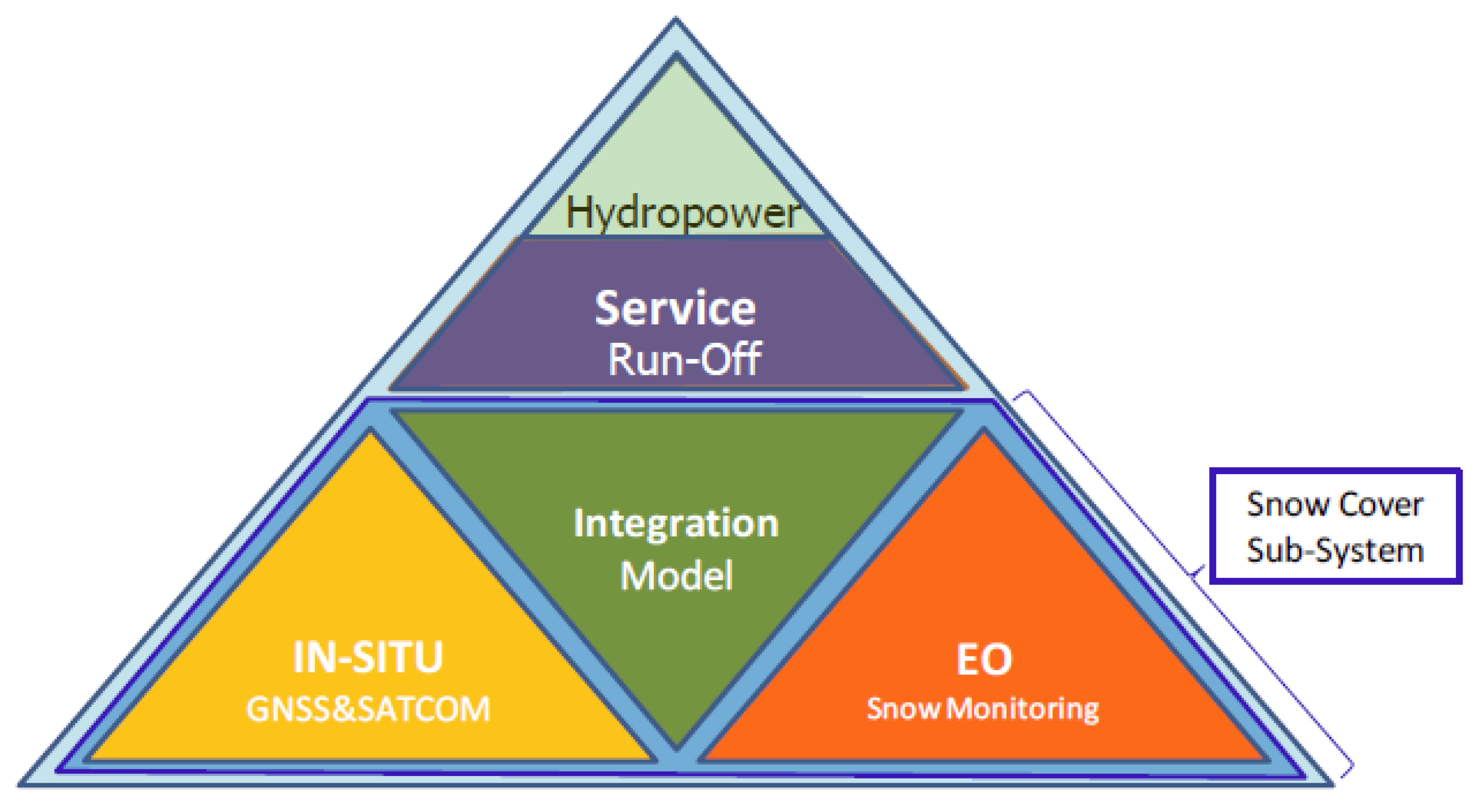
2.1. The SnowSense Concept
2.2. SnowSense Testsites in Canada
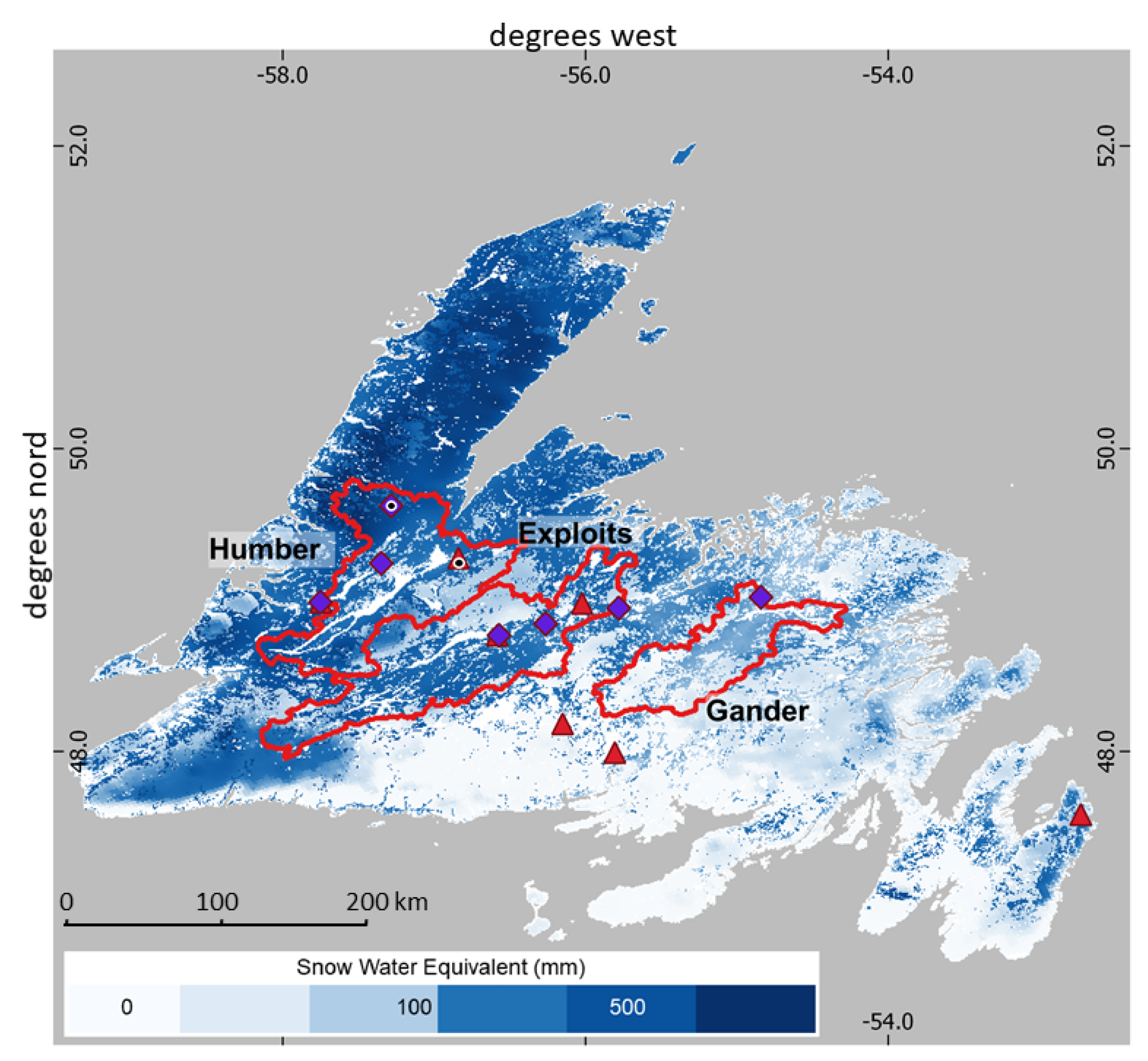
2.2.1. The Island of Newfoundland
2.2.2. The Forêt Montmorency NEIGE Site near Quebec
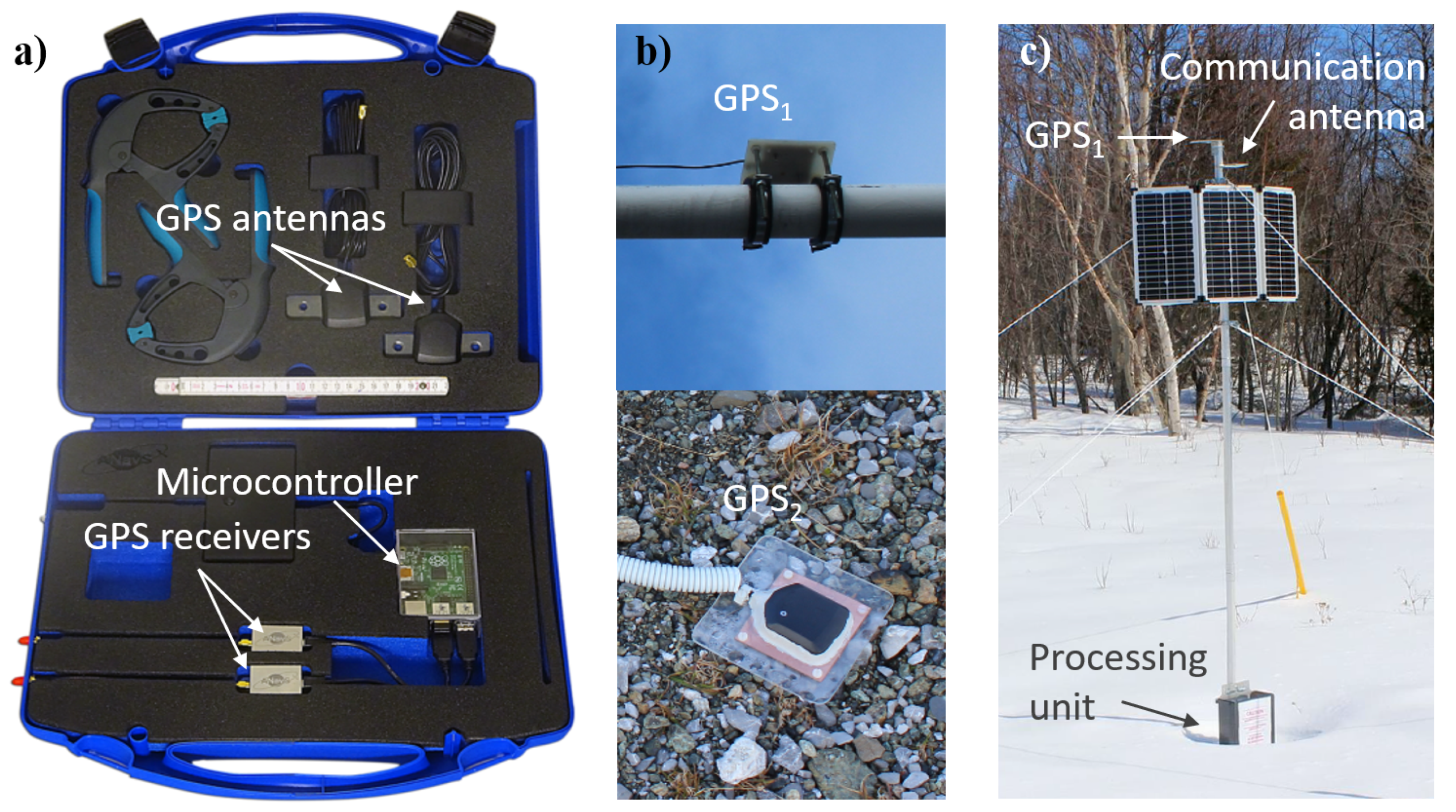
2.3. In Situ Station Design and Setup
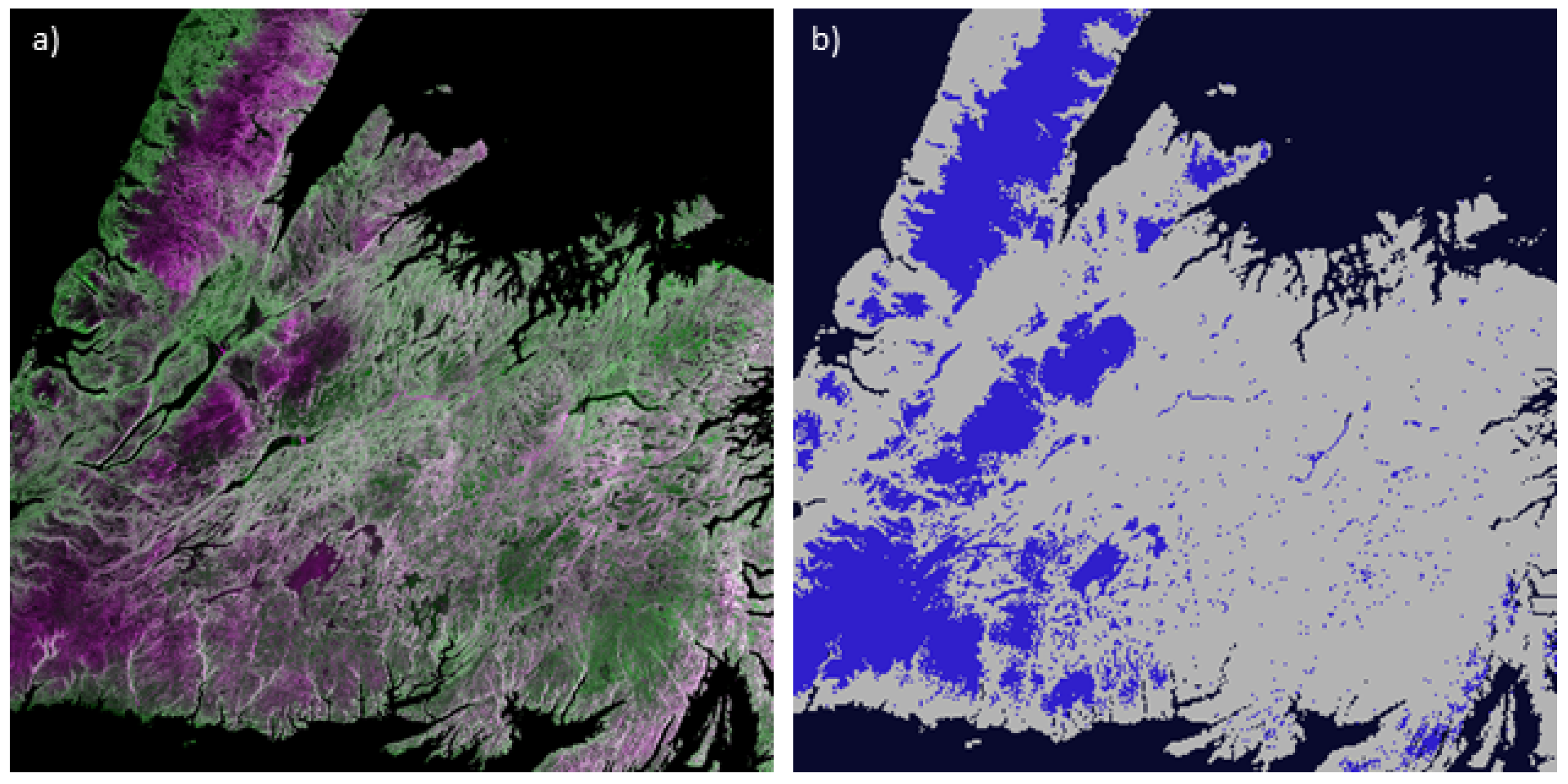
2.4. EO and Data Processing
2.5. Processes of Mass and Energy Transfer—PROMET Model Component
2.6. Assimilation
3. Results and Discussion
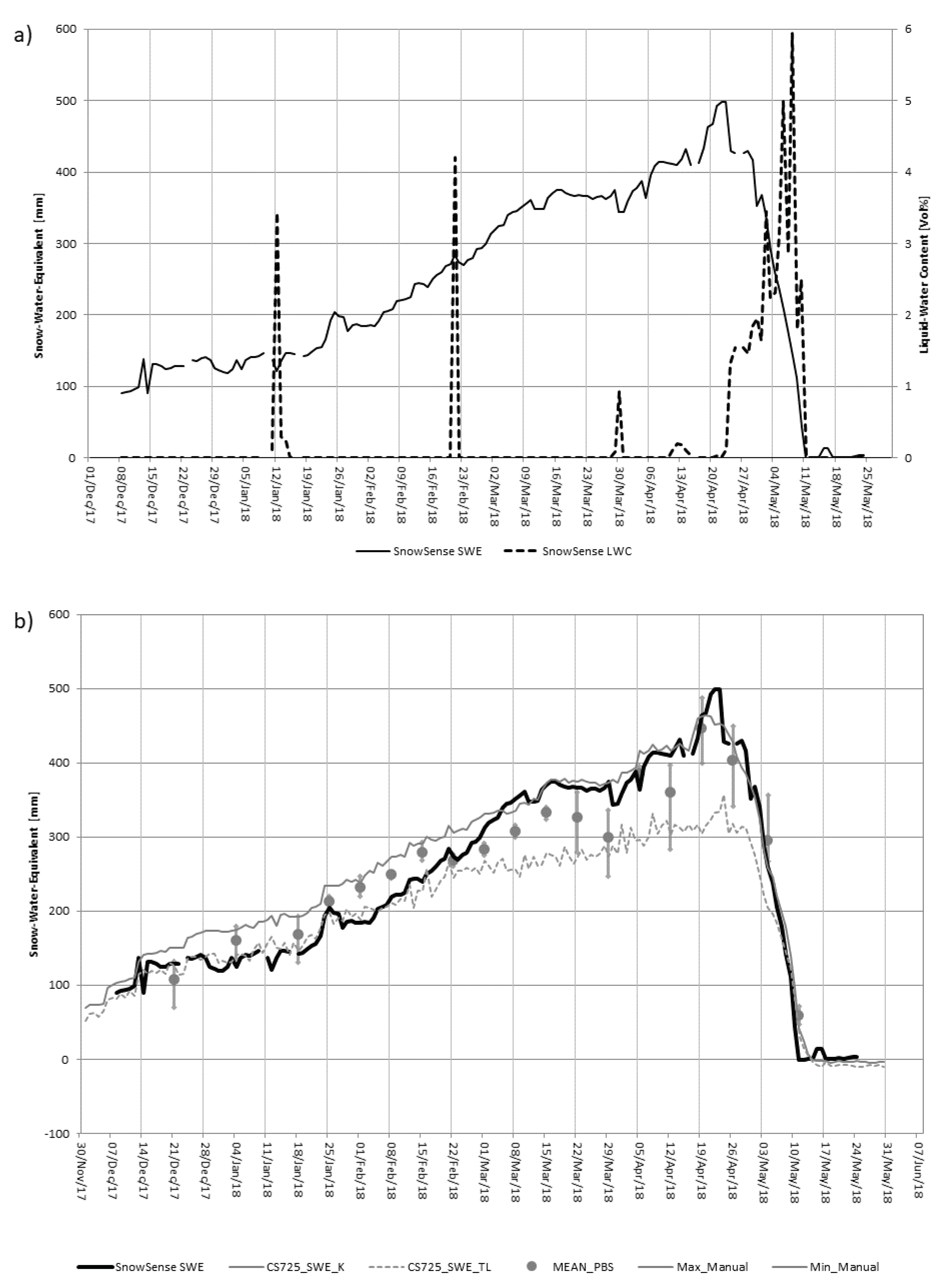
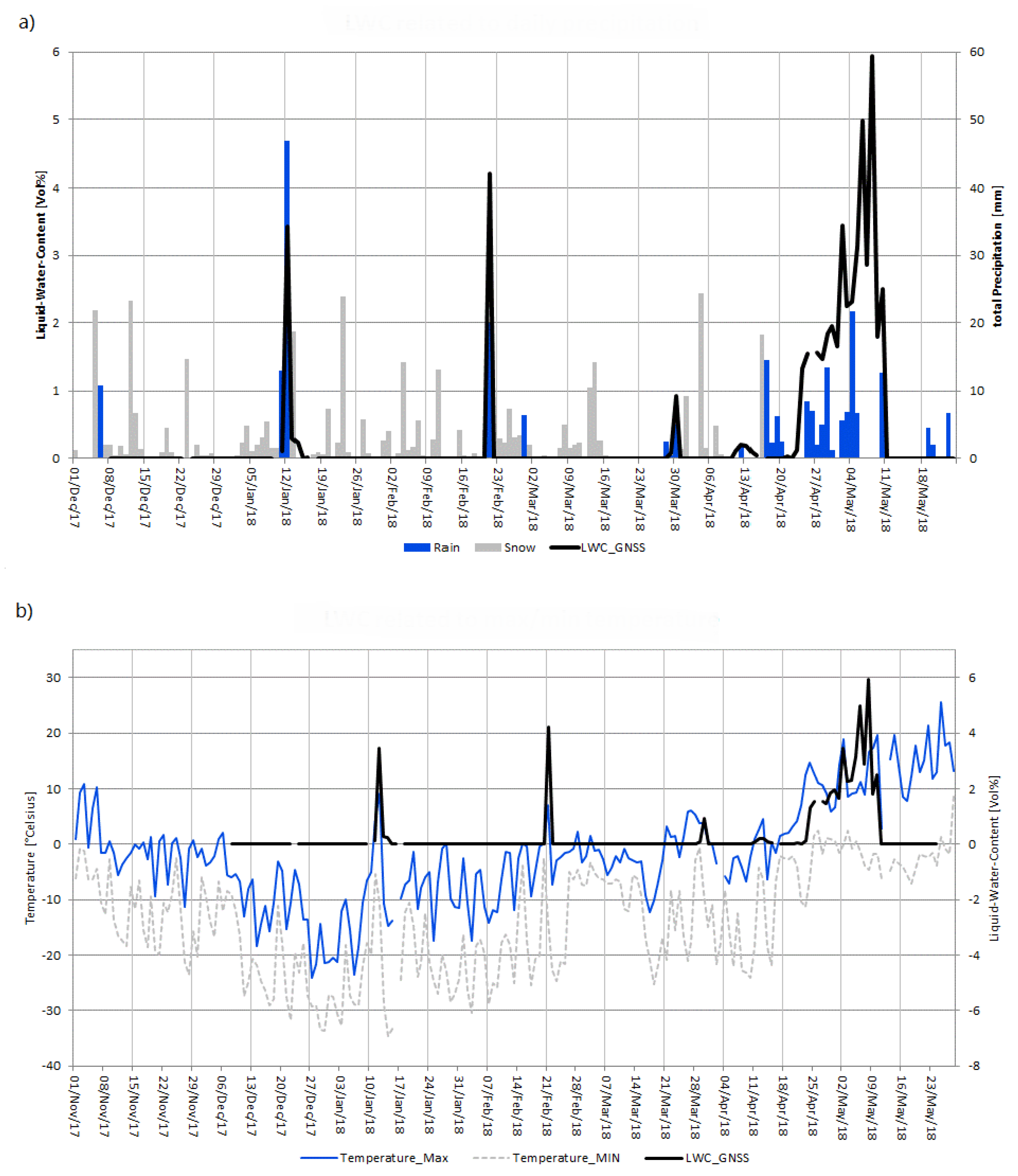
3.1. Station Performance at the Forêt Montmorency NEIGE Site near Quebec
3.2. SnowSense Service for the Island of Newfoundland
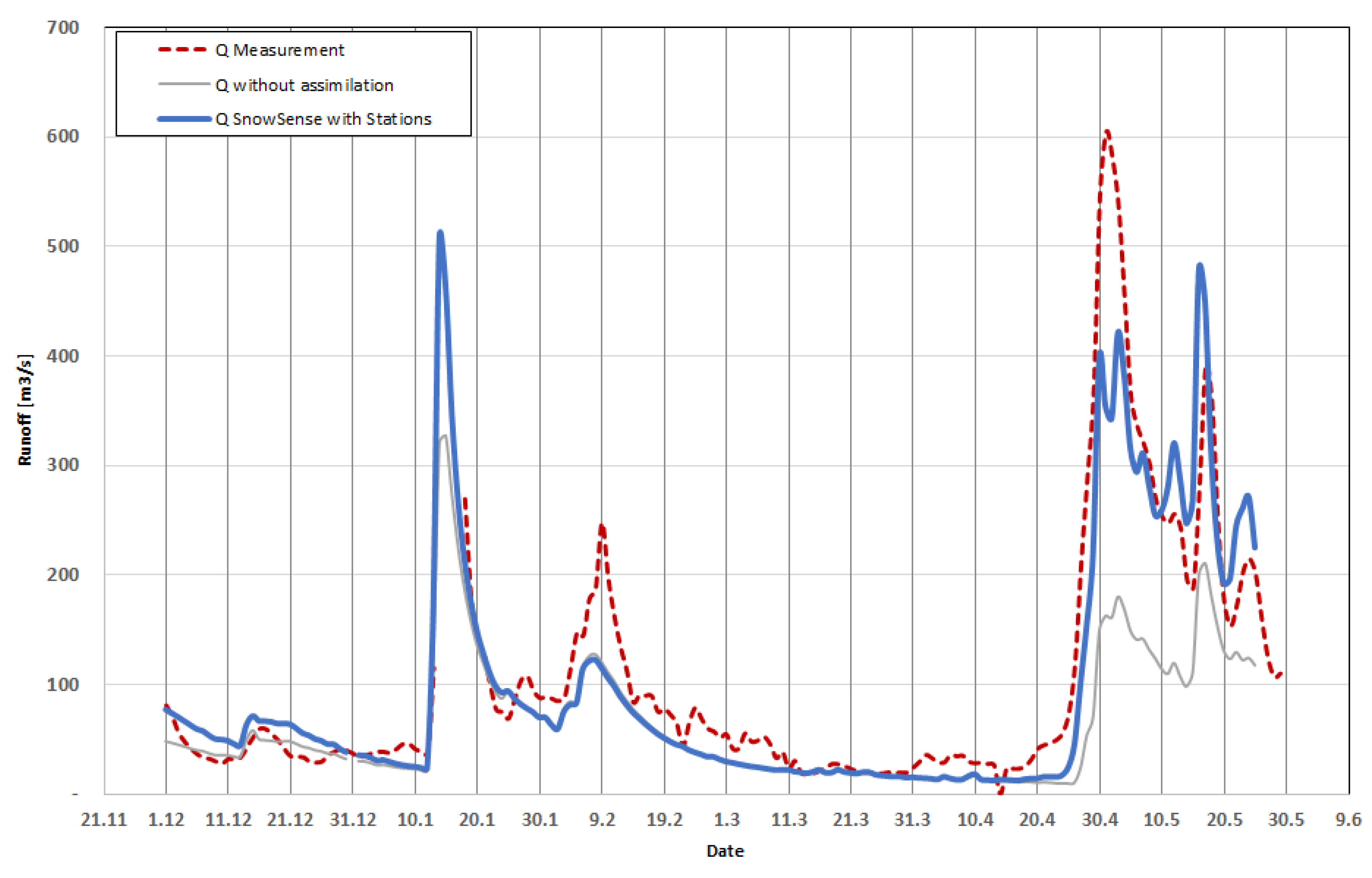
3.2.1. Humber River
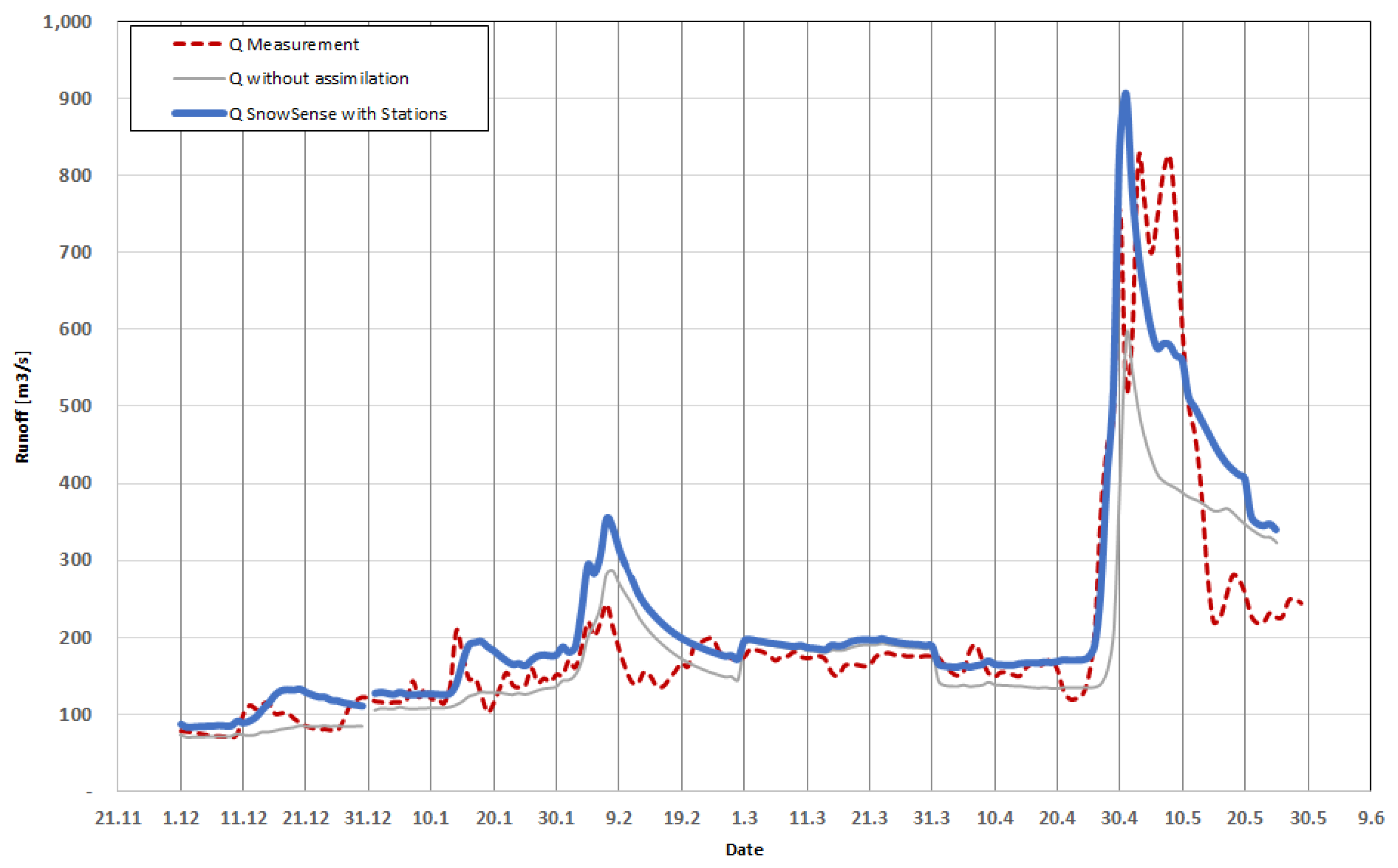
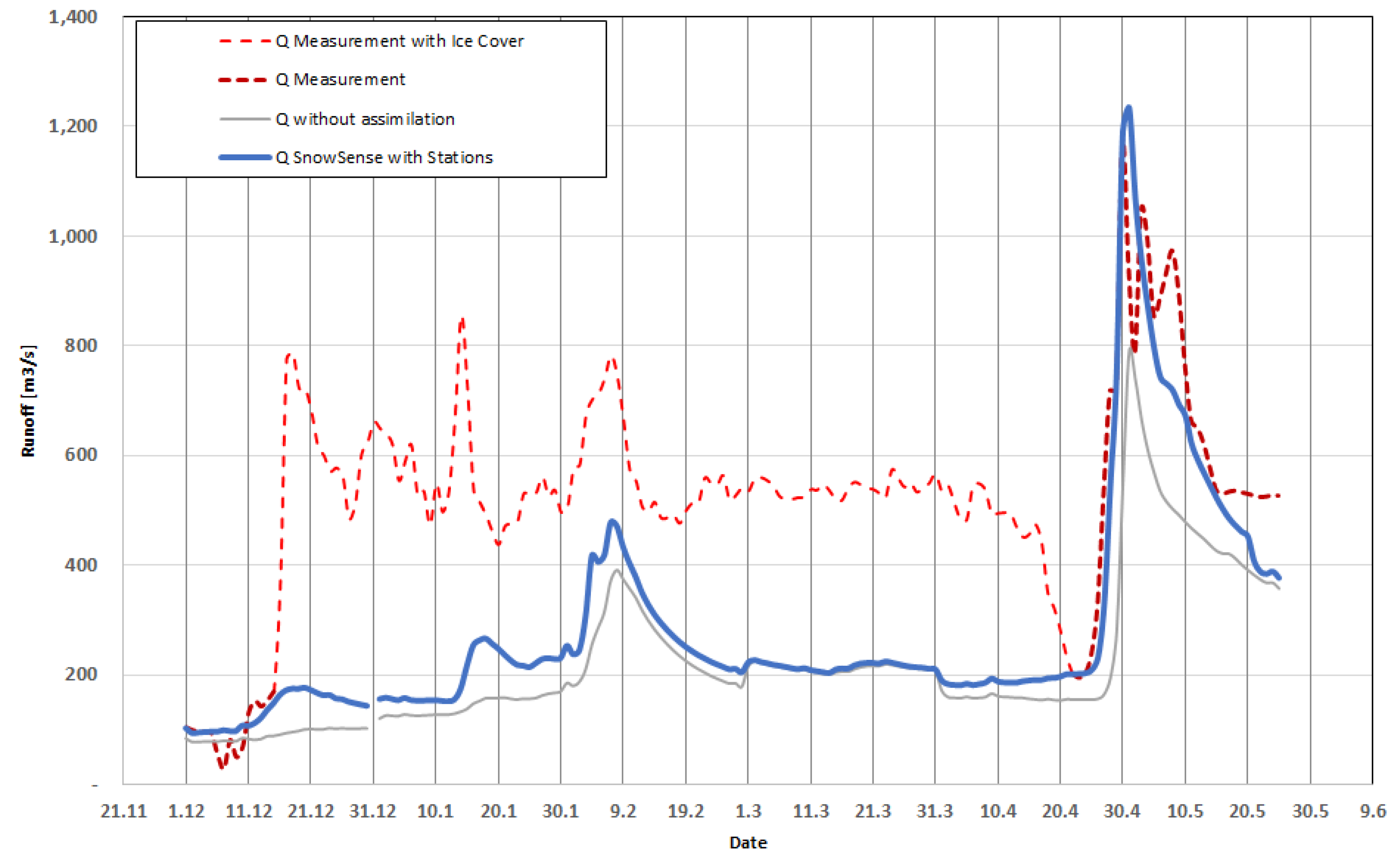
3.2.2. Exploits River
3.3. Advantages and Potential Limitations
3.4. Demo User Feedback
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- IPCC. AR5: Climate Change 2013: The Physical Science Basis; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Kinar, N.J.; Pomeroy, J.W. Measurement of the physical properties of the snowpack. Rev. Geophys. 2015, 53, 481–544. [Google Scholar] [CrossRef]
- Pirazzini, R.; Leppänen, L.; Picard, G.; Lopez-Moreno, J.I.; Marty, C.; Macelloni, G.; Kontu, A.; von Lerber, A.; Tanis, C.M.; Schneebeli, M.; et al. European In-Situ Snow Measurements: Practices and Purposes. Sensors 2018, 18, 2016. [Google Scholar] [CrossRef] [PubMed]
- Johnson, J.B.; Marks, D. The detection and correction of snow water equivalent pressure sensor errors. Hydrol. Process. 2004, 18, 3513–3525. [Google Scholar] [CrossRef]
- Desilets, D.; Zreda, M.; Ferre, T.P.A. Nature’s neutron probe: Land surface hydrology at an elusive scale with cosmic rays. Water Resour. Res. 2010, 46. [Google Scholar] [CrossRef]
- Choquette, Y.; Lavigne, P.; Nadeau, M.; Ducharme, P.; Martin, J.P.; Houdayer, A.; Rogoza, J. GMON, a new sensor for snow water equivalent via gamma monitoring. In Proceedings of the International Snow Science Workshop, Whistler, BC, Canada, 21–27 September 2008. [Google Scholar]
- Smith, C.D.; Kontu, A.; Laffin, R.; Pomeroy, J.W. An assessment of two automated snow water equivalent instruments during the WMO Solid Precipitation Intercomparison Experiment. Cryosphere 2017, 11, 101–116. [Google Scholar] [CrossRef]
- Koch, F.; Henkel, P.; Appel, F.; Schmid, L.; Bach, H.; Lamm, M.; Prasch, M.; Schweizer, J.; Mauser, W. Retrieval of snow water equivalent, liquid water content and snow height of dry and wet snow by combining GPS signal attenuation and time delay. Water Resour. Res. 2018. submitted. [Google Scholar]
- Larson, K.; Gutmann, E.; Zavorotny, V.; Braun, J.; Williams, M.; Nievinski, F. Can we measure snow depth with GPS receivers? Geophys. Res. Lett. 2009, 36, L17502. [Google Scholar] [CrossRef]
- Koch, F.; Prasch, M.; Schmid, L.; Schweizer, J.; Mauser, W. Measuring Snow Liquid Water Content with Low-Cost GPS Receivers. Sensors 2014, 14, 20975–20999. [Google Scholar] [CrossRef] [PubMed]
- Henkel, P.; Koch, F.; Appel, F.; Bach, H.; Prasch, M.; Schmid, L.; Schweizer, J.; Mauser, W. Snow Water Equivalent of Dry Snow Derived From GNSS Carrier Phases. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3561–3572. [Google Scholar] [CrossRef]
- Steiner, L.; Meindl, M.; Fierz, C.; Geiger, A. An assessment of sub-snow GPS for quantification of snow water equivalent. Cryosphere 2018, 12, 3161–3175. [Google Scholar] [CrossRef]
- Hall, D. Remote Sensing of Ice and Snow; Springer: New York, NY, USA, 2012. [Google Scholar]
- Tedesco, M. Remote Sensing of the Cryosphere; Wiley: Hoboken, NJ, USA, 2014. [Google Scholar]
- Malenovsky, Z.; Rott, H.; Cihlar, J.; Schaepman, M.E.; Garcia-Santos, G.; Fernandes, R.; Berger, M. Sentinels for science: Potential of Sentinel-1, -2, and -3 missions for scientific observations of ocean, cryosphere, and land. Remote Sens. Environ. 2012, 120, 91–101. [Google Scholar] [CrossRef]
- Hall, D.K.; Riggs, G.A.; Salomonson, V.V.; DiGirolamo, N.E.; Bayr, K.J. MODIS snow-cover products. Remote Sens. Environ. 2002, 83, 181–194. [Google Scholar] [CrossRef]
- Lopez, P.; Sirguey, P.; Arnaud, Y.; Pouyaud, B.; Chevallier, P. Snow cover monitoring in the Northern Patagonia Icefield using MODIS satellite images (2000–2006). Glob. Planet. Chang. 2008, 61, 103–116. [Google Scholar] [CrossRef]
- Sirguey, P.; Mathieu, R.; Arnaud, Y. Subpixel monitoring of the seasonal snow cover with MODIS at 250 m spatial resolution in the Southern Alps of New Zealand: Methodology and accuracy assessment. Remote Sens. Environ. 2009, 113, 160–181. [Google Scholar] [CrossRef]
- Kim, E.; Gatabe, C.; Hall, D.; Newlin, J.; Misakonis, A.; Elder, K.; Marshall, H.P.; Hiemstra, C.; Brucker, L.; De Marco, E.; et al. Overview of SnowEx Year 1 Activities. In Proceedings of the SnowEx Workshop, Longmont, CO, USA, 8–10 August 2017; Available online: https://ntrs.nasa.gov/search.jsp?R=20170007518 (accessed on 9 January 2019).
- Cline, D.W.; Bales, R.C.; Dozier, J. Estimating the spatial distribution of snow in mountain basins using remote sensing and energy balance modeling. Water Resour. Res. 1998, 34, 1275–1285. [Google Scholar] [CrossRef]
- Immerzeel, W.; Droogers, P.; de Jong, S.; Bierkens, M. Large-scale monitoring of snow cover and runoff simulation in Himalayan river basins using remote sensing. Remote Sens. Environ. 2009, 113, 40–49. [Google Scholar] [CrossRef]
- Mauser, W.; Bach, H. PROMET–Large scale distributed hydrological modelling to study the impact of climate change on the water flows of mountain watersheds. J. Hydrol. 2009, 376, 362–377. [Google Scholar] [CrossRef]
- Banfield, C.E.; Jacobs, J.D. Regional Patterns of Temperature and Precipitation for Newfoundland and Labrador during the past Century. Can. Geogr. 1998, 42, 354–364. [Google Scholar] [CrossRef]
- Environment Canada. The Climate of Newfoundland. Available online: http://atlantic-web1.ns.ec.gc.ca/climatecentre/default.asp?lang=En&n=83846147-1 (accessed on 9 January 2019).
- Bobba, A.G.; Lam, D.C.L.; Kay, D.; Ullah, W. Interfacing a hydrological model with the RAISON expert system. Water Resour. Manag. 1992, 6, 25–34. [Google Scholar] [CrossRef]
- Lamm, M.; Koch, F.; Appel, F.; Henkel, P. Estimation of Snow Parameters with GPS and Galileo. In Proceedings of the International Symposium ELMAR, Zadar, Croatia, 16–19 September 2018. [Google Scholar]
- European Space Agency (ESA). SENTINEL-1 SAR User Guide. Available online: https://sentinel.esa.int/web/sentinel/user-guides/sentinel-1-sar (accessed on 9 January 2019).
- Appel, F.; Bach, H.; Heege, T.; de la Mar, J.; Siegert, F.; Rücker, G. APPS4GMES–Development of operational products and services for GMES a bavarian initiative. In Proceedings of the ESA Living Planet Symposium, Edinburgh, UK, 9–13 September 2013. [Google Scholar]
- Appel, F.; Bach, H.; Loew, A.; Ludwig, R.; Mauser, W. Monitoring and Modeling of the Snow Cover Dynamic in Southern Germany-Capabilities of Optical and Microwave Remote Sensing. In Proceedings of the 25th Annual Symposium of the European Association of Remote Sensing Laboratories (EARSeL), Porto, Portugal, 6–11 June 2005. [Google Scholar]
- Nagler, T.; Rott, H. Retrieval of wet snow by means of multitemporal SAR data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 754–765. [Google Scholar] [CrossRef]
- Mauser, W.; Schädlich, S. Modelling the spatial distribution of evapotranspiration on different scales using remote sensing data. J. Hydrol. 1998, 212–213, 250–267. [Google Scholar] [CrossRef]
- Ludwig, R.; Mauser, W. Modelling catchment hydrology within a GIS based SVAT-model framework. Hydrol. Earth Syst. Sci. 2000, 4, 239–249. [Google Scholar] [CrossRef]
- Strasser, U.; Mauser, W. Modelling the spatial and temporal variations of the water balance for the Weser catchment 1965–1994. J. Hydrol. 2001, 254, 199–214. [Google Scholar] [CrossRef]
- Nachtergaele, F.; van Velthuizen, H.; Verelst, L. Harmonized World Soil Database. In Proceedings of the 19th World Congress of Soil Science, Soil Solutions for a Changing World, Brisbane, Australia, 1–6 August 2010. [Google Scholar]
- Zabel, F.; Mauser, W. 2-way coupling the hydrological land surface model PROMET with the regional climate model MM5. Hydrol. Earth Syst. Sci. 2013, 17, 1705–1714. [Google Scholar] [CrossRef]
- Government of Canada. HRDPS Data in GRIB2 Format. Available online: https://weather.gc.ca/grib/grib2_HRDPS_HR_e.html (accessed on 9 January 2019).
- Andreadis, K.M.; Lettenmaier, D.P. Assimilating remotely sensed snow observations into a macroscale hydrology model. Adv. Water Resour. 2006, 29, 872–886. [Google Scholar] [CrossRef]
- Nagler, T.; Rott, H.; Malcher, P.; Müller, F. Assimilation of meteorological and remote sensing data for snowmelt runoff forecasting. Remote Sens. Environ. 2008, 112, 1408–1420. [Google Scholar] [CrossRef]
- Magnusson, J.; Gustafsson, D.; Hüsler, F.; Jonas, T. Assimilation of point SWE data into a distributed snow cover model comparing two contrasting methods. Water Resour. Res. 2014, 50, 7816–7835. [Google Scholar] [CrossRef]
- Sensoy, A.; Schwanenberg, D.; Sorman, A.; Akkol, B.; Montero, R.; Uysal, G. Assimilating H-SAF and MODIS Snow Cover Data into the Conceptual Models HBV and SRM. In Proceedings of the Conference on EGU, Vienna, Austria, 27 April–2 May 2014. [Google Scholar]
- Jörg-Hess, S.; Griessinger, N.; Zappa, M. Probabilistic Forecasts of Snow Water Equivalent and Runoff in Mountainous Areas. J. Hydrometeorol. 2015, 16, 2169–2186. [Google Scholar] [CrossRef]
- Helmert, J.; Sensoy Sorman, A.; Alvarado Montero, R.; De Michele, C.; de Rosnay, P.; Dumont, M.; Finger, D.C.; Lange, M.; Picard, G.; Potopova, V.; et al. Review of Snow Data Assimilation Methods for Hydrological, Land Surface, Meteorological and Climate Models: Results from a COST HarmoSnow Survey. Geosciences 2018, 8, 489. [Google Scholar] [CrossRef]
- Appel, F.; Bach, H.; Ohl, N.; Mauser, W. Provision Of Snow Water Equivalent From Satellite Data and the Hydrological Model PROMET Using Data Assimilation Techniques. In Proceedings of the IGARSS 2007 International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007. [Google Scholar]
- Wright, M.; Kavanaugh, J.; Labine, C. Performance Analysis of GMON3 Snow Water Equivalency Sensor. In Proceedings of the 79th Annual Western Snow Conference, Stateline, NV, USA, 18–21 April 2011. [Google Scholar]
- Schmid, L.; Koch, F.; Heilig, A.; Prasch, M.; Eisen, O.; Mauser, W.; Schweizer, J. A novel sensor combination (upGPR-GPS) to continuously and nondestructively derive snow cover properties. Geophys. Res. Lett. 2015, 42, 3397–3405. [Google Scholar] [CrossRef]
- Choquette, Y.; Ducharme, P.; Rogoza, J. CS725, an accurate sensor for the snow water equivalent and soil moisture measurements. In Proceedings of the International Snow Science Workshop, Grenoble, France, 7–11 October 2013; pp. 931–936. [Google Scholar]
- Mauser, W.; Klepper, G.; Zabel, F.; Delzeit, R.; Hank, T.; Putzenlechner, B.; Calzadilla, A. Global biomass production potentials exceed expected future demand without the need for cropland expansion. Nat. Commun. 2015, 6, 8946. [Google Scholar] [CrossRef] [PubMed]
- Mauser, W.; Prasch, M. Regional Assessment of Global Change Impacts: The Project GLOWA-Danube; Springer: New York, NY, USA, 2015. [Google Scholar]
- Lindenschmidt, K.E.; Sydor, M.; Carson, R.W. Modelling ice cover formation of a lake–river system with exceptionally high flows (Lake St. Martin and Dauphin River, Manitoba). Cold Reg. Sci. Technol. 2012, 82, 36–48. [Google Scholar] [CrossRef]
- Shen, H.T. Mathematical modeling of river ice processes. Cold Reg. Sci. Technol. 2010, 62, 3–13. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE [mm w.e.] | R2 | |
|---|---|---|
| GMON CS725_K, manual | 71.94 | 0.71 |
| GMON CS725_TL, manual | 91.38 | 0.15 |
| GMON CS725_K, GNSS | 35.89 | 0.93 |
| GMON CS725_TL, GNSS | 68.22 | 0.53 |
| manual, GNSS | 65.98 | 0.64 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Appel, F.; Koch, F.; Rösel, A.; Klug, P.; Henkel, P.; Lamm, M.; Mauser, W.; Bach, H. Advances in Snow Hydrology Using a Combined Approach of GNSS In Situ Stations, Hydrological Modelling and Earth Observation—A Case Study in Canada. Geosciences 2019, 9, 44. https://doi.org/10.3390/geosciences9010044
Appel F, Koch F, Rösel A, Klug P, Henkel P, Lamm M, Mauser W, Bach H. Advances in Snow Hydrology Using a Combined Approach of GNSS In Situ Stations, Hydrological Modelling and Earth Observation—A Case Study in Canada. Geosciences. 2019; 9(1):44. https://doi.org/10.3390/geosciences9010044
Chicago/Turabian StyleAppel, Florian, Franziska Koch, Anja Rösel, Philipp Klug, Patrick Henkel, Markus Lamm, Wolfram Mauser, and Heike Bach. 2019. "Advances in Snow Hydrology Using a Combined Approach of GNSS In Situ Stations, Hydrological Modelling and Earth Observation—A Case Study in Canada" Geosciences 9, no. 1: 44. https://doi.org/10.3390/geosciences9010044
APA StyleAppel, F., Koch, F., Rösel, A., Klug, P., Henkel, P., Lamm, M., Mauser, W., & Bach, H. (2019). Advances in Snow Hydrology Using a Combined Approach of GNSS In Situ Stations, Hydrological Modelling and Earth Observation—A Case Study in Canada. Geosciences, 9(1), 44. https://doi.org/10.3390/geosciences9010044