A Multispectral Bayesian Classification Method for Increased Acoustic Discrimination of Seabed Sediments Using Multi-Frequency Multibeam Backscatter Data

 and
and
Abstract
1. Introduction
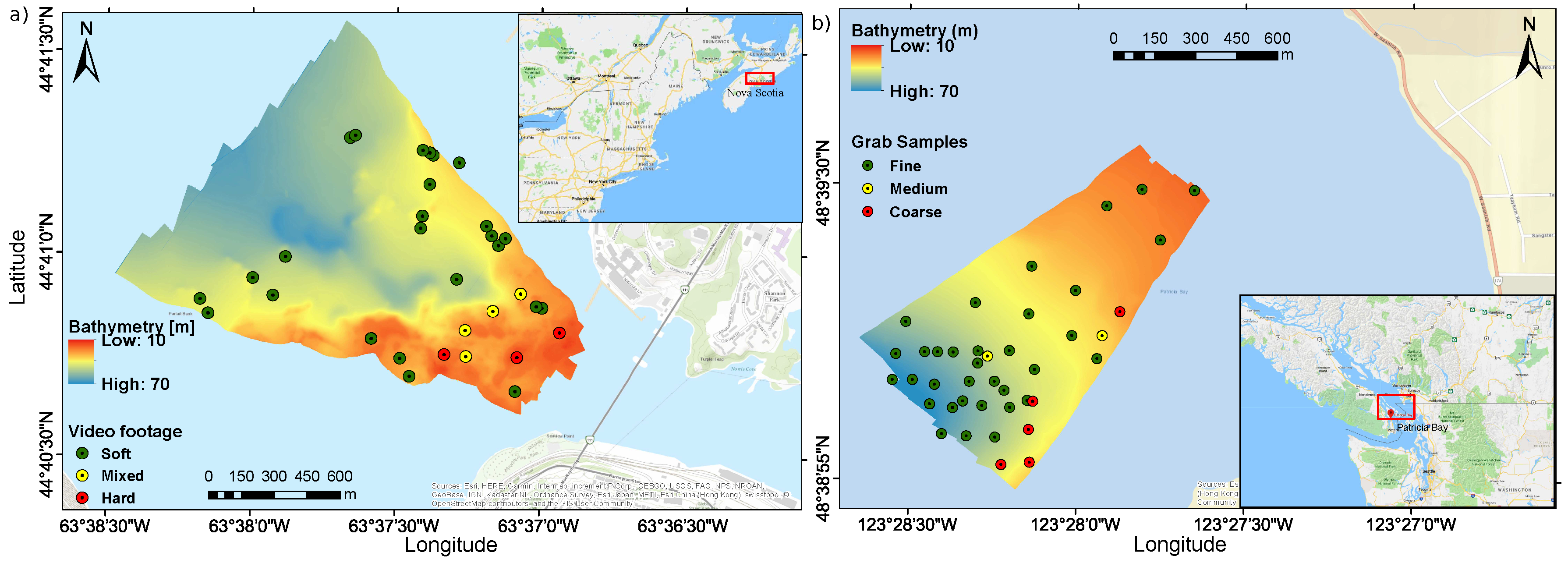
2. Study Area and Dataset
2.1. Bedford Basin
2.2. Patricia Bay
2.3. Multispectral Data
3. Theory and Method
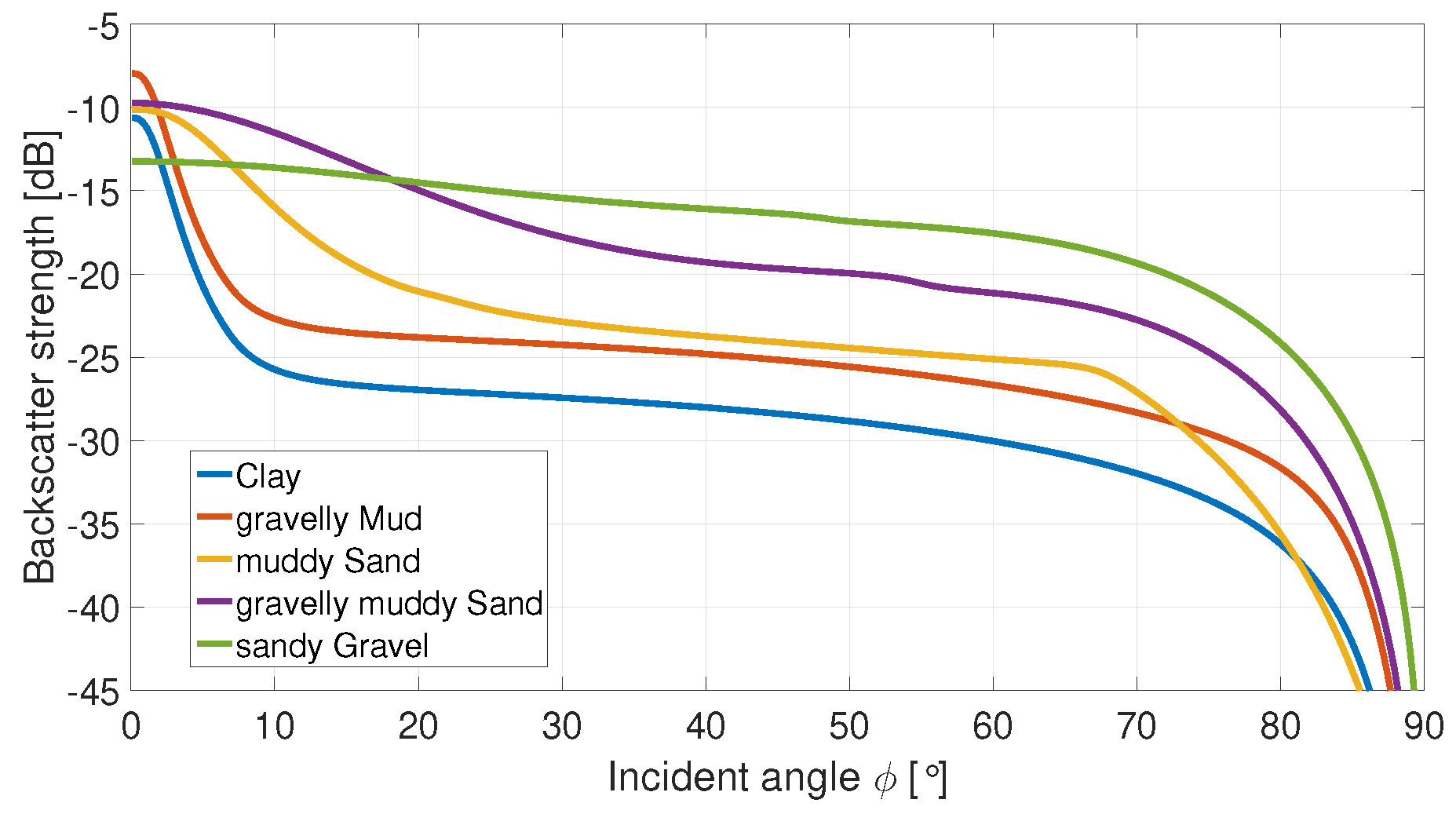
3.1. Acoustic Theory
3.2. Acoustic Data Processing Applied to the R2Sonic 2026
3.3. Bayesian Method
3.4. Multispectral Seabed Classification
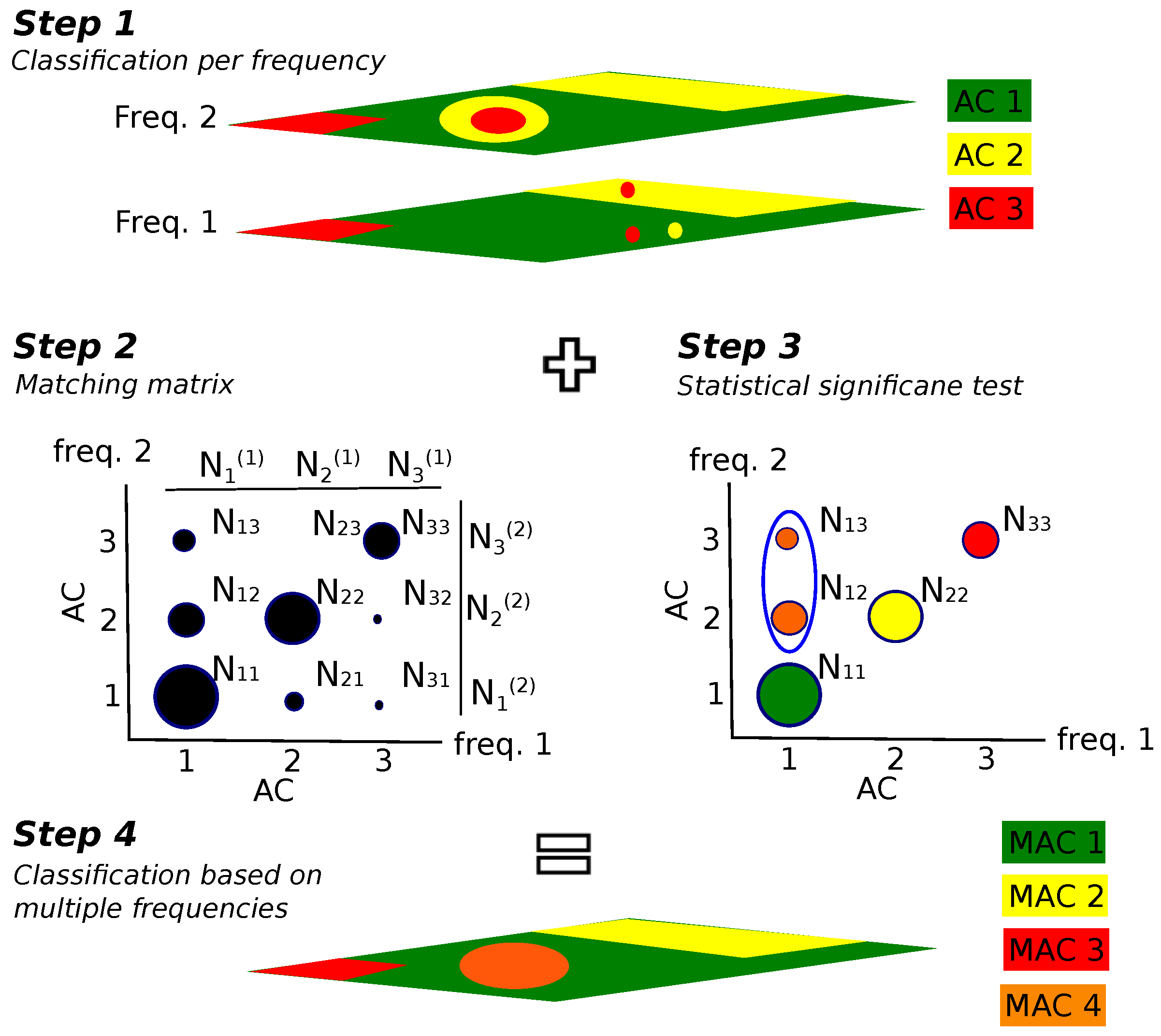
- Step 1.
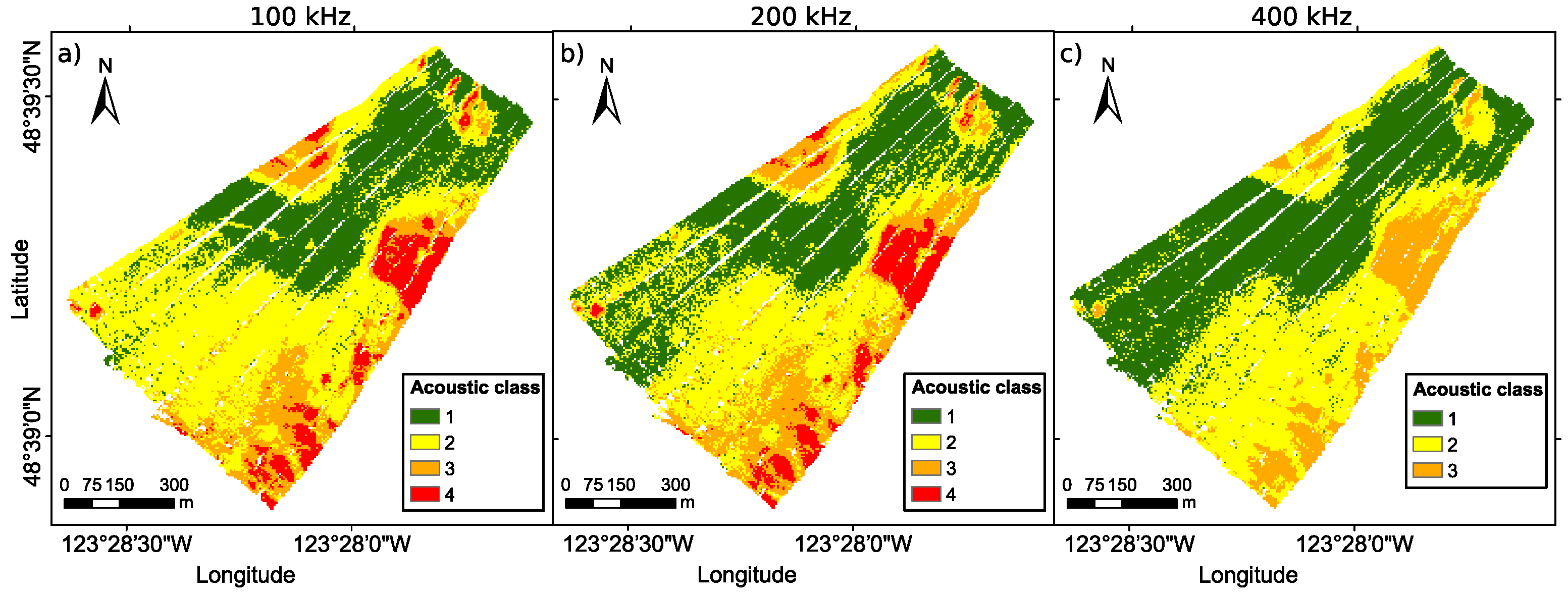
- In this step, the Bayesian method is applied to the backscatter histograms per frequency (see Section 3.3). As such, each frequency results in its own classification map (Figure 2).
- Step 2.
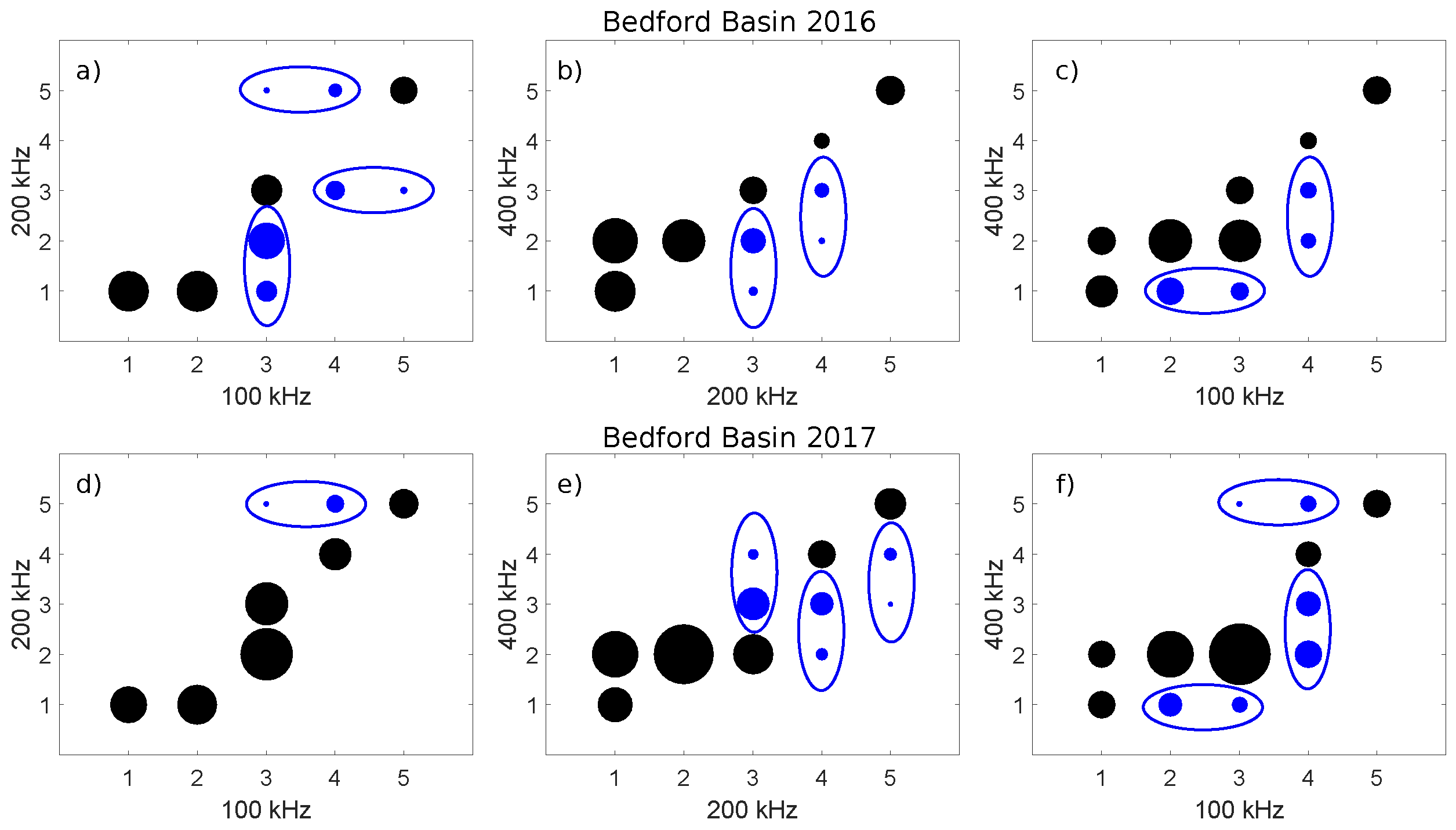
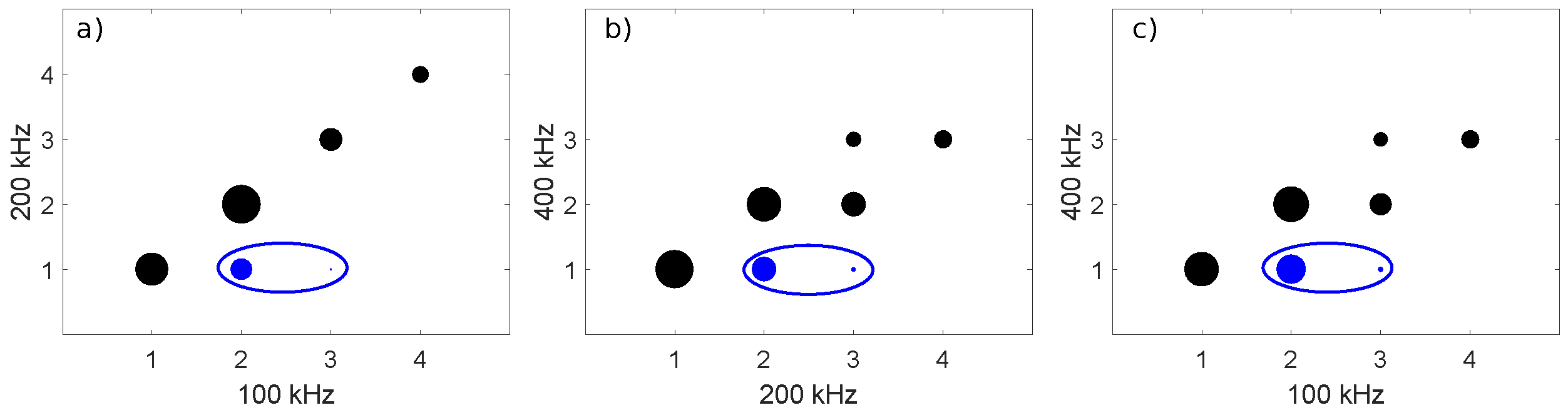
- This step calculates the spatial matching between classes obtained from the classification at the individual frequencies (Figure 2). The results are stored in the so-called matching matrix. Each column of the matching matrix represents the locations classified by , while each row represents the locations classified by .
- Step 3.
- The third step is to test whether or not the combinations found are statistically significant. A statistical significance test is performed to assess the actual existence of classes gained by combining the classification results of different frequencies. This statistically corresponds to the null hypothesis , stated as follows: The AC combination per frequency pair represents an acoustic class. The alternative hypothesis is that the AC combination is not statistically significant and due to the occurrence of misclassification. The null hypothesis needs to be tested for every possible acoustic class combination per frequency pair. This is thus performed on all individual elements of the matching matrix (i.e., the nine elements with , for the example considered in Figure 2).
- The left-hand side of Equation (12) represents an empirical probability based on the classified real data, whereas the right-hand side expresses a theoretical probability based on the Bayesian decision rule. Therefore, if the empirical probability exceeds the theoretical ones, the null hypothesis is accepted and hence a significant multispectral acoustic class (MAC) is identified. This is in agreement with the statistical significance test, that whenever a variable is larger than its standard deviation, it is considered to be statistically significant.
- From Equation (12) it follows that, if the occurrence probability of the combination of and , obtained at f and , is larger than the theoretical probability that this combination occurs due to at least one misclassification (either on , or both), then the null hypothesis is accepted. This combination is thus statistically significant and accepted as a MAC. The rejected combinations are supposed not to be statistically significant.
- Step 4.
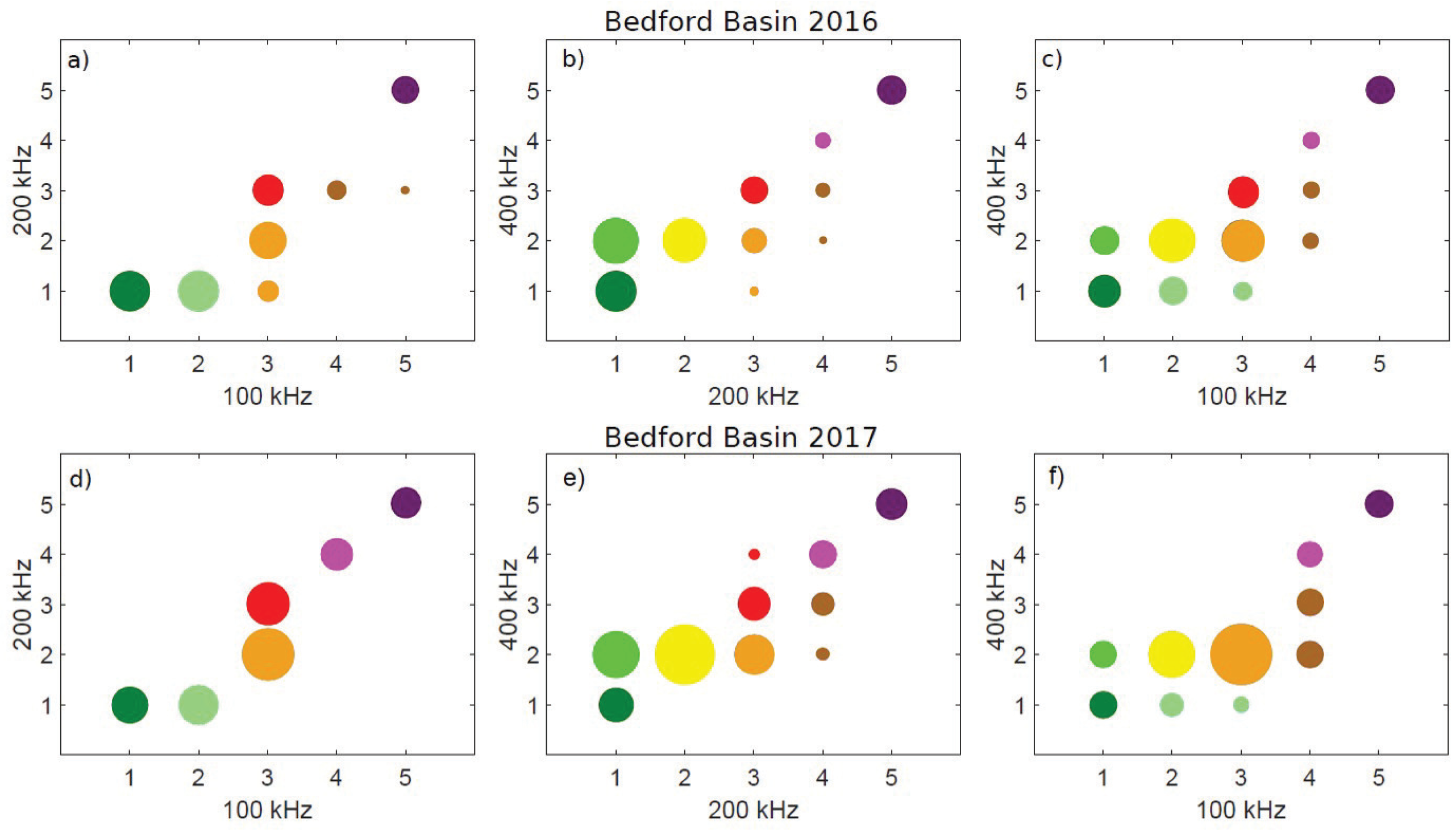
- This step generates the acoustic multispectral classification map, i.e., a MAC to each location within the survey area is assigned. In case only two frequencies are employed (as shown in Figure 2), a MAC is assigned to each location according to the corresponding AC combination. Considering n frequencies, the number of frequency pairs increases to , and the generation of the AC map becomes k-dimensional. That means that each location corresponds to k AC combinations. Let us assume that, for each location, we have k numbers of acoustic candidates, i.e., . The most probable candidate is selected to be the final MAC of that location. This is achieved based on the probabilities of the correct classification of frequency pairs. For example, the theoretical probability of the correct classification of the frequency pair is with . Per location, each acoustic candidate has thus a probability of occurrence . The acoustic candidate with the highest possible probability is considered to be the most probable one, and hence the corresponding MAC of the frequency pair is obtained. This will be followed to make a unique classification map over available frequency pairs.
4. Results
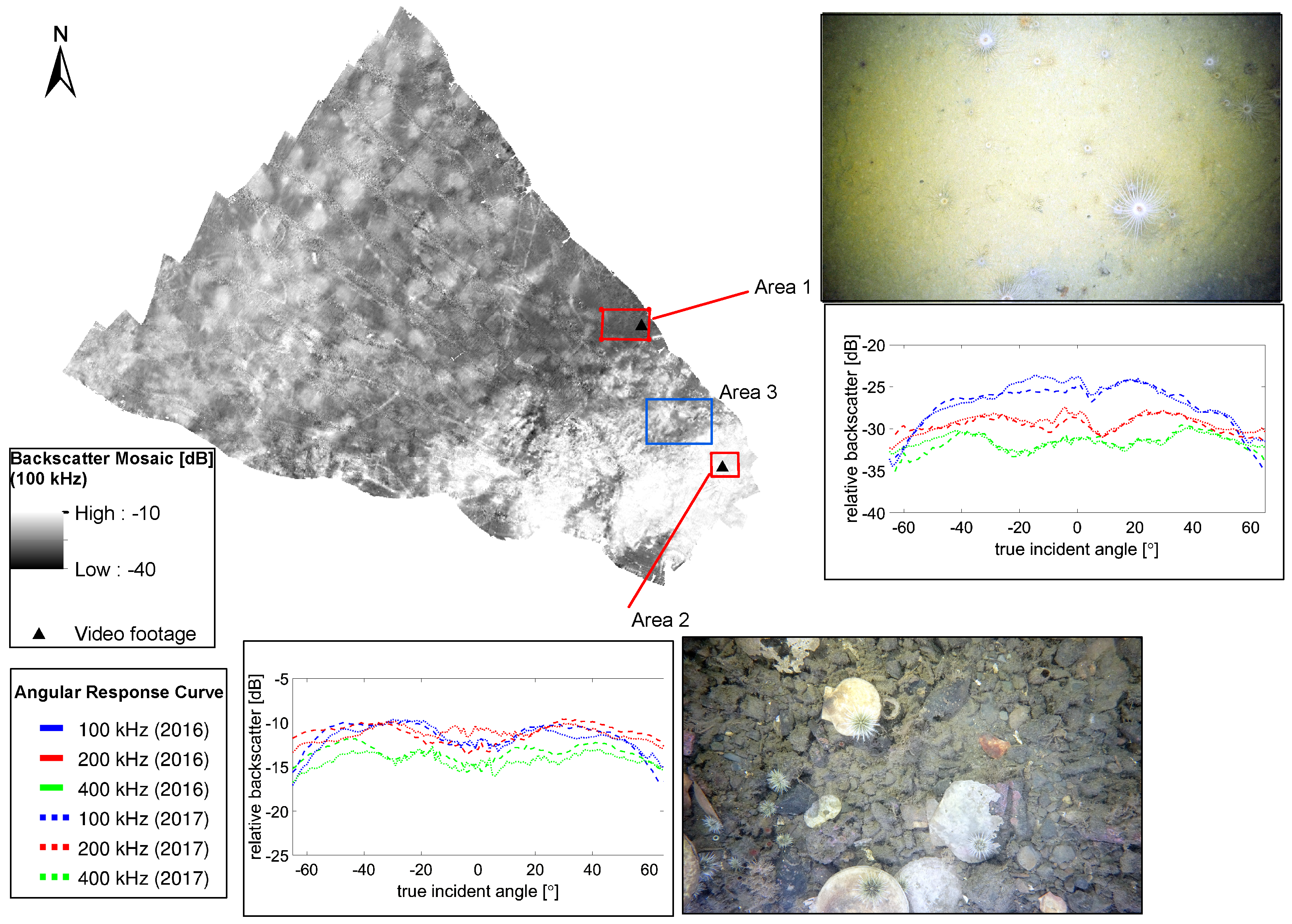
4.1. Verification and Interpretation of Acoustic Data Processing
4.2. Application of the Bayesian Method to Multispectral Backscatter Data
4.2.1. Bedford Basin
4.2.2. Patricia Bay
4.3. Evaluation of the Benefit of Using Multiple Frequencies
4.3.1. Bedford Basin
4.3.2. Patricia Bay
4.4. Combination of Multiple Frequencies
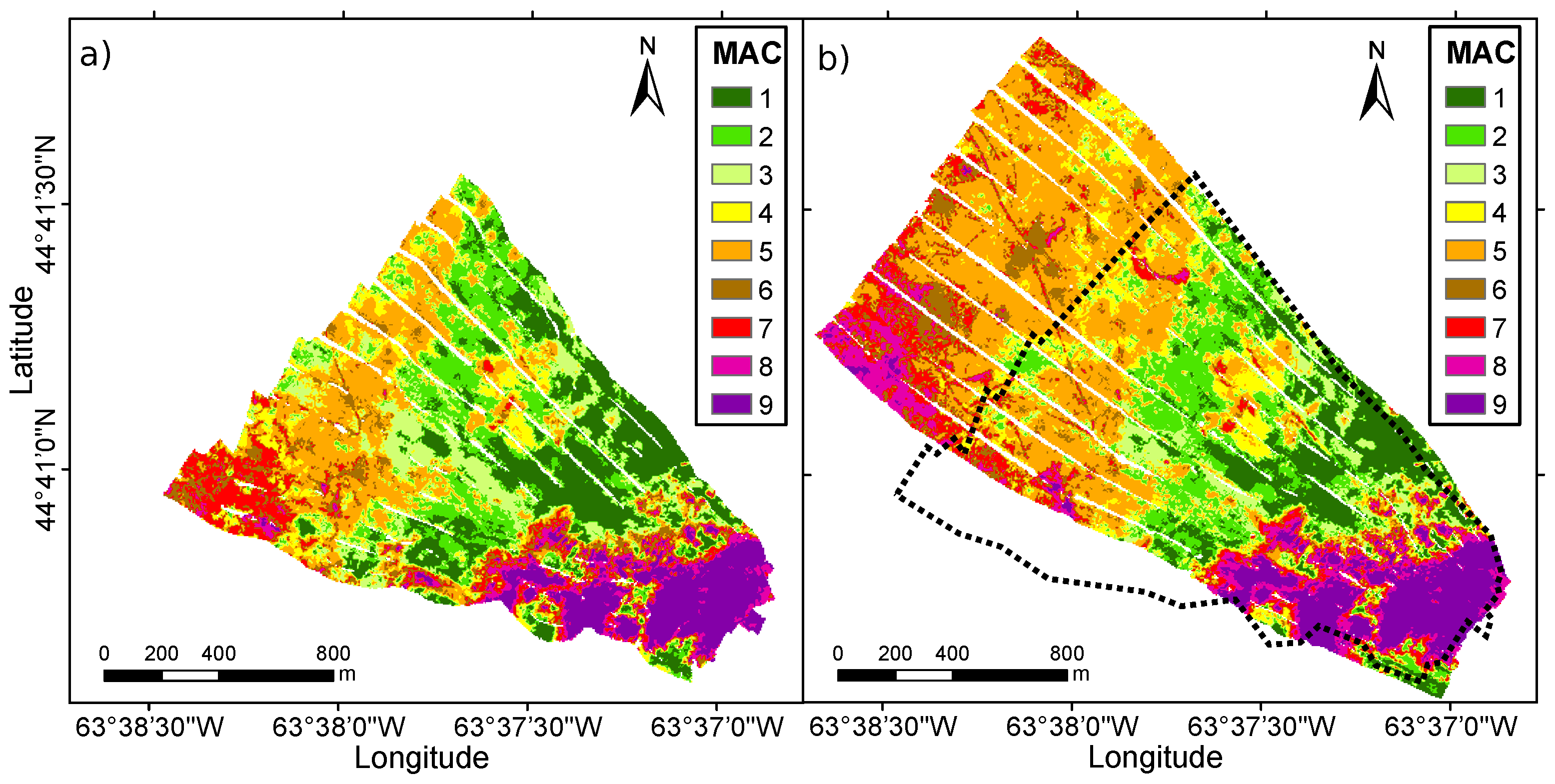
4.4.1. Bedford Basin
- more temporarily and spatially stable or
- acoustically less affected to slight changes in the sediment composition; for example, deposition of small amount of sand on a muddy sediment affects the resulting backscatter more than that on gravelly sediment does.
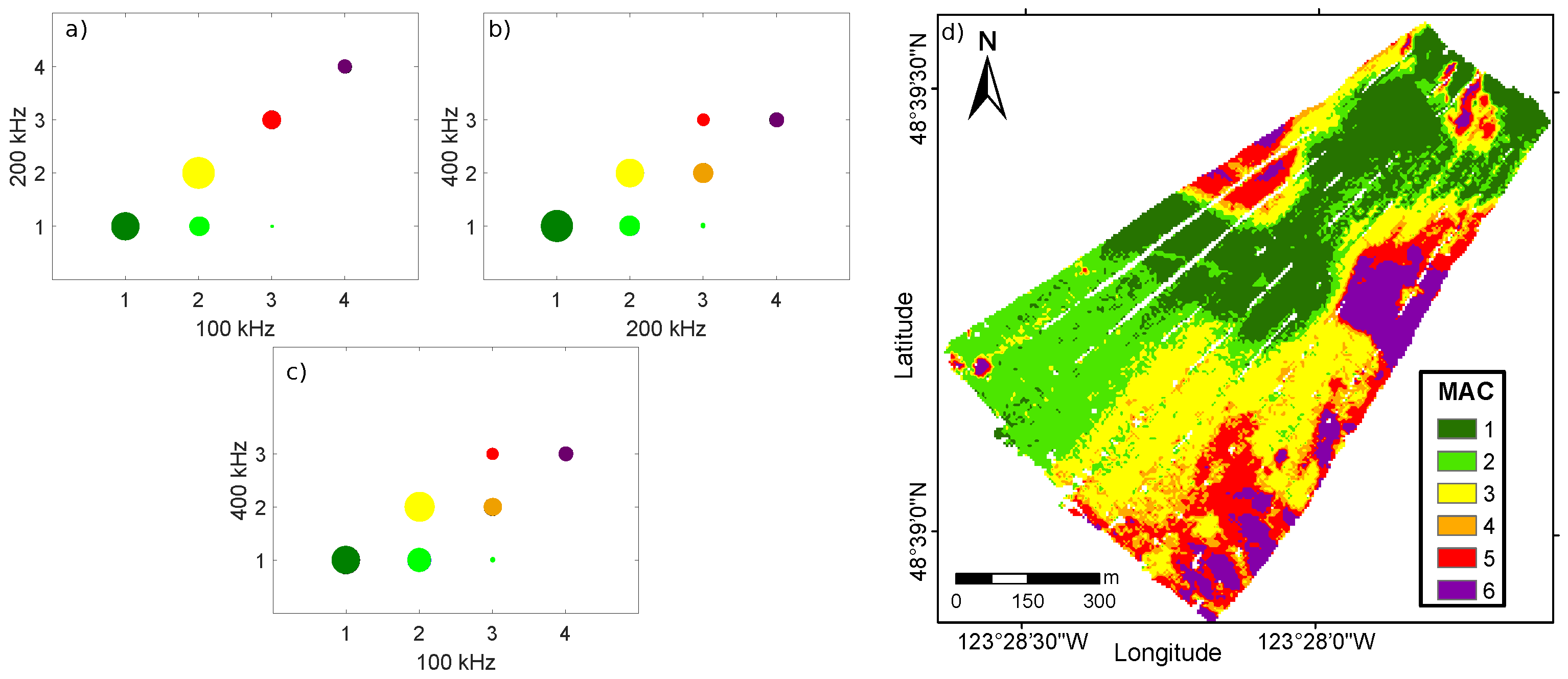
4.4.2. Patricia Bay
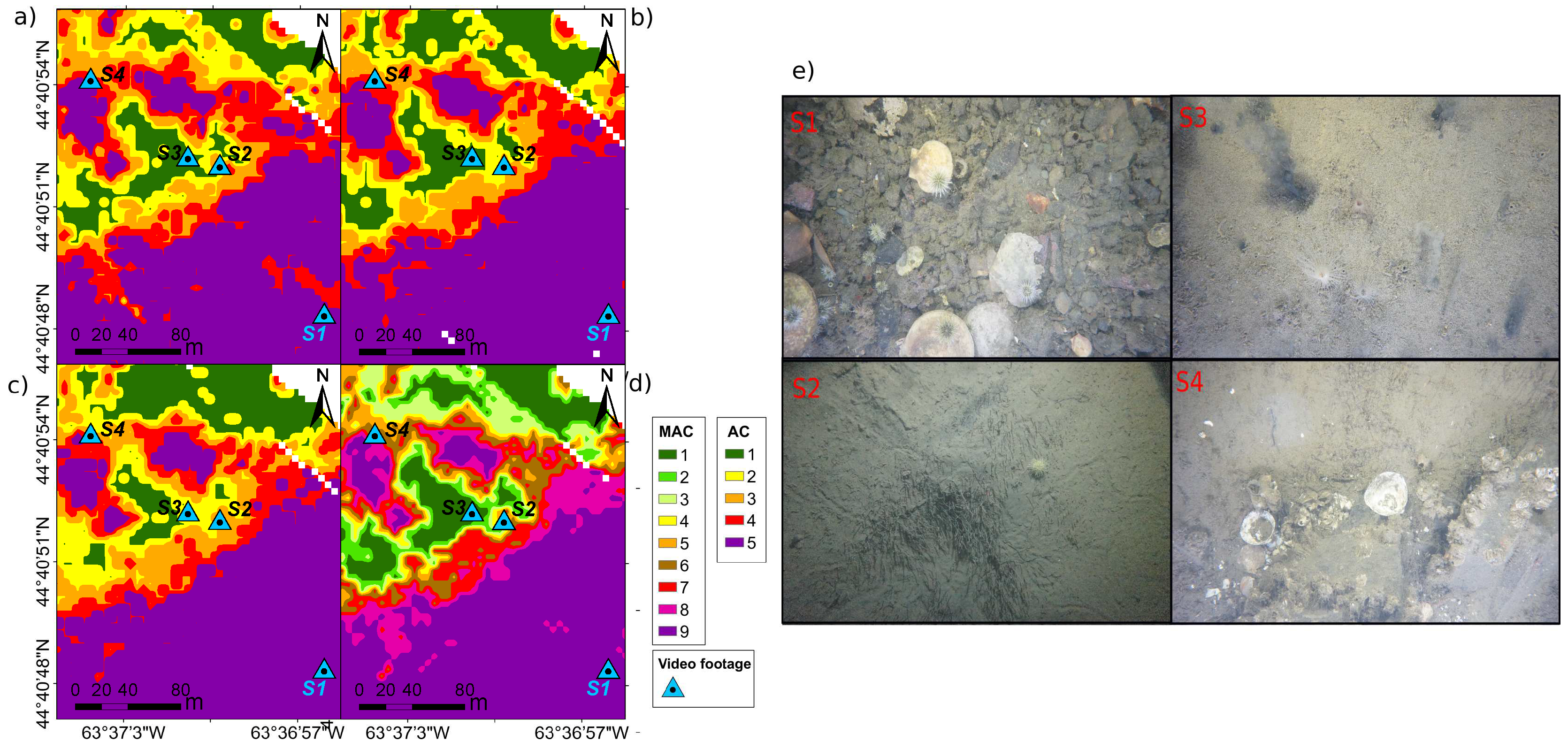
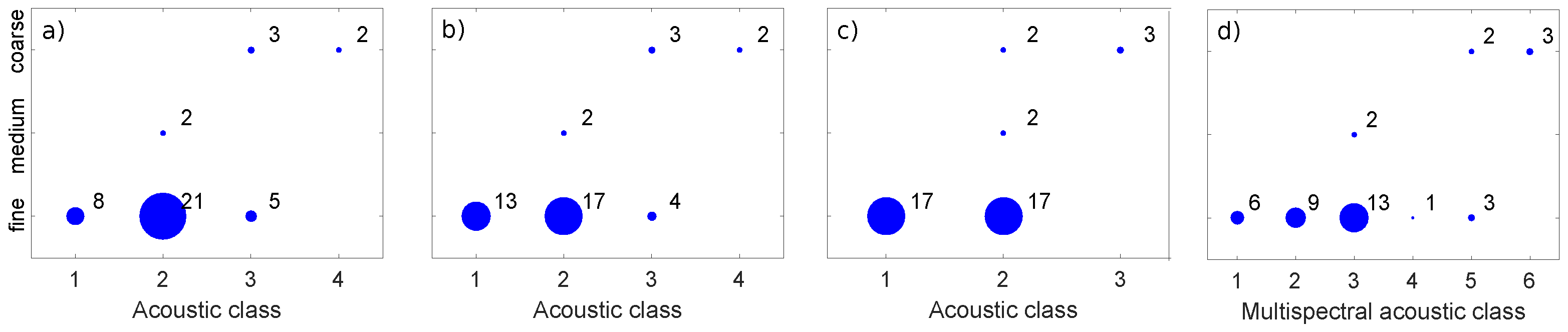
4.5. Correspondence between Ground-Truth and Acoustic Classification
4.5.1. Bedford Basin
4.5.2. Patricia Bay
5. Discussion
- (1)
- Combining 100 and 400 kHz, in general, reveals the most additional information about the seabed. This is in agreement with the study of Hughes Clark [17], who pointed out that at least a frequency spacing of one octave is required to use the frequency dependency of backscatter but that a separation of two octaves (100 vs. 400 kHz ) is desired.
- (2)
- The use of multiple frequencies allows for a better acoustic discrimination of seabed sediments than single-frequency data. For all datasets, in particular for the Bedford Basin, more MACs are revealed than ACs by applying the multispectral classification algorithm. However, careful interpretation of the additional classes is required. There are three possible reasons: (i) the relationship between roughness and acoustic wavelength, (ii) a dominating scattering regime, and (iii) signal penetration. The first and second issue reflect the additional discrimination of the surficial sediments, whereas the third reason combines information from different depths at the seabed. Insights into the relative importance of the above factors are needed to interpret the MAC map.
- (3)
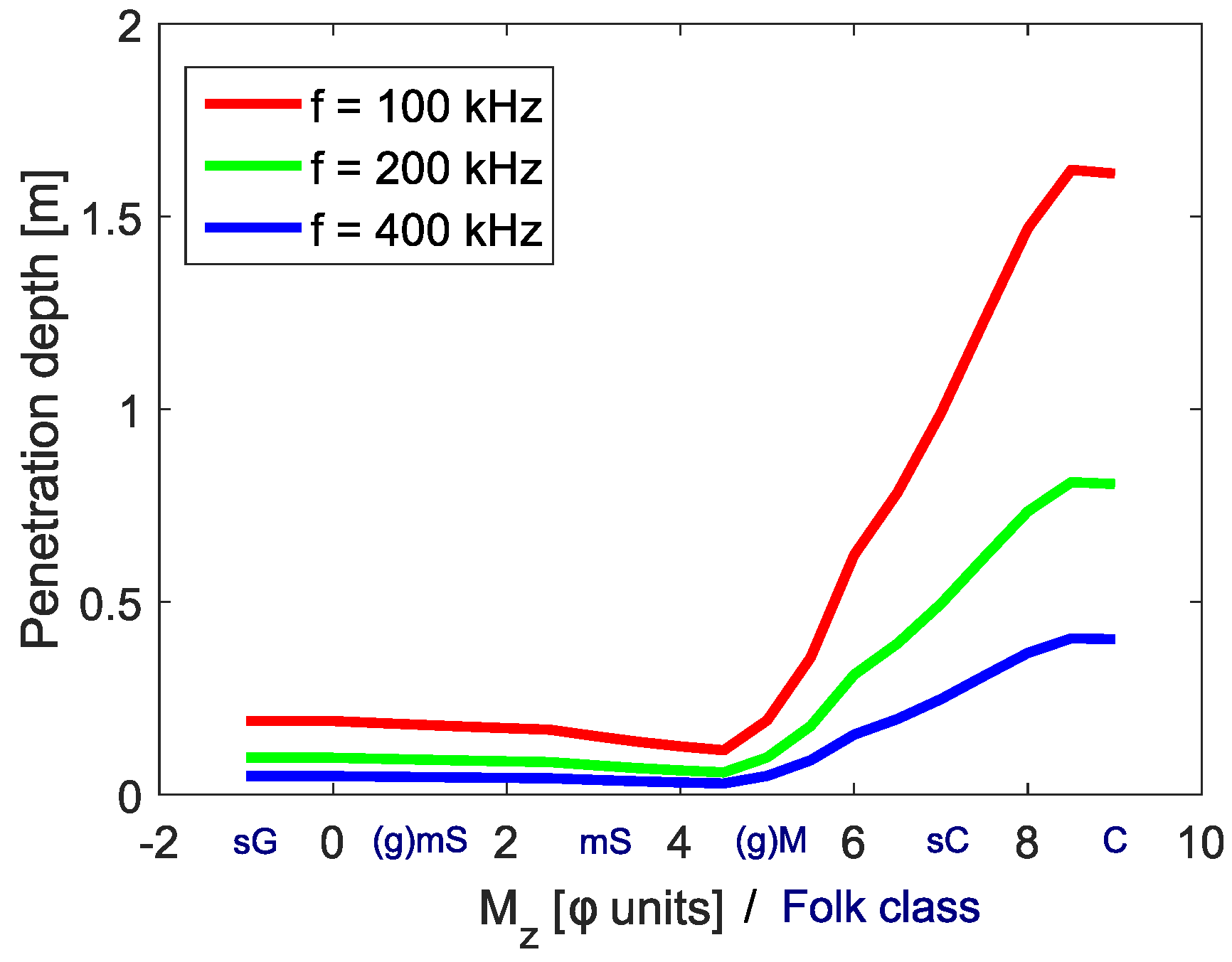
- The optimal frequency selection for ASC depends on the local seabed. The results from two different study areas have shown that the most discriminative frequency and the benefit of using multiple frequencies for ASC highly depends on the local seabed, and a general conclusion cannot be drawn. In the Bedford Basin, a significantly increased discrimination performance is observed, which seems to be mainly based on the increasing signal penetration from 400 to 100 kHz. In Patricia Bay, we observed only a slightly increased discrimination performance. This might result from the fact that the finest sediment in that area is muddy sand and the corresponding signal penetration does not differ very much for the different frequencies. However, we need to consider that the 10-year time difference between ground truthing and acoustic data acquisition results in unknown uncertainties. The surficial sediment distribution might have changed within this period.
Benefits Versus Drawbacks of Multispectral Backscatter
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lecours, V.; Dolan, M.F.J.; Micallef, A.; Lucieer, V.L. A review of marine geomorphometry, the quantitative study of the seafloor. Hydrol. Earth Syst. Sci. 2016, 20, 3207–3244. [Google Scholar] [CrossRef]
- Brown, C.J.; Smith, S.J.; Lawton, P.; Anderson, J.T. Benthic habitat mapping: A review of progress towards improved understanding of the spatial ecology of the seafloor using acoustic techniques. Estuar. Coast. Shelf Sci. 2011, 92, 502–520. [Google Scholar] [CrossRef]
- Jackson, D.R.; Richardson, M.D. High-Frequency Seafloor Acoustics. In High-Frequency Seafloor Acoustics; Springer: New York, NY, USA, 2007. [Google Scholar] [CrossRef]
- Williams, K.L.; Jackson, D.A.; Tang, D.; Briggs, K.B.; Thorsos, E.I. Acoustic Backscattering from a Sand and a Sand/Mud Environment: Experiments and Data/Model Comparisons. IEEE J. Ocean. Eng. 2009, 34, 388–398. [Google Scholar] [CrossRef]
- Applied Physics Laboratory, University of Washington. APL-UW High-Frequency Ocean Environmental Acoustic Models Handbook; Technical Report APL-UW TR9407; Applied Physics Laboratory, University of Washington: Seattle, WA, USA, 1994. [Google Scholar]
- Medwin, H.; Clay, C. Fundamentals of Acoustical Oceanography; Elsevier Inc.: Amsterdam, The Netherlands, 1998. [Google Scholar] [CrossRef]
- Ivakin, A.N.; Sessarego, J. High frequency broad band scattering from water-saturated granular sediments: Scaling effects. J. Acoust. Soc. Am. 2007, 122, 165–171. [Google Scholar] [CrossRef] [PubMed]
- Buscombe, D.; Grams, P.E.; Kaplinski, M.A. Compositional Signatures in Acoustic Backscatter over Vegetated and Unvegetated Mixed Sand-Gravel Riverbeds. J. Geophys. Res. Earth Surf. 2017, 122, 1771–1793. [Google Scholar] [CrossRef]
- Ryan, W.B.F.; Flood, R.D. Side-looking sonar backscatter response at dual frequencies. Mar. Geophys. Res. 1996, 18, 689–705. [Google Scholar] [CrossRef]
- Guillon, L.; Lurton, X. Backscattering from buried sediment layers: The equivalent input backscattering strength model. J. Acoust. Soc. Am. 2001, 109, 122–132. [Google Scholar] [CrossRef]
- Schneider von Deimling, J.; Weinrebe, W.; Tóth, Z.; Fossing, H.; Endler, R.; Rehder, G.; Spieß, V. A low frequency multibeam assessment: Spatial mapping of shallow gas by enhanced penetration and angular response anomaly. Mar. Pet. Geol. 2013, 44, 217–222. [Google Scholar] [CrossRef]
- Jackson, D.R.; Baird, A.M.; Crisp, J.J.; Thomson, P.A.G. High-frequency bottom backscatter measurements in shallow water. J. Acoust. Soc. Am. 1986, 80, 1188–1199. [Google Scholar] [CrossRef]
- Urick, R.J. The backscattering of Sound from a Harbor Bottom. J. Acoust. Soc. Am. 1954, 26, 231–235. [Google Scholar] [CrossRef]
- Hefner, B.T.; Jackson, D.R.; Ivakin, A.M.; Tang, D. High frequency measurements of backscatttering from heterogeneities and discrete scatteres in sand sediments. In Proceedings of the Tenth European Conference on Underwater Acoustics (ECUA2010), Istanbul, Turkey, 5–9 July 2010; Volume 3, pp. 1386–1390. [Google Scholar]
- Eleftherakis, D.; Snellen, M.; Amiri-Simkooei, A.R.; Simons, D.G. Observations regarding coarse sediment classification based on multi-beam echo-sounder’s backscatter strength and depth residuals in Dutch rivers. J. Acoust. Soc. Am. 2004, 135, 3305–3315. [Google Scholar] [CrossRef] [PubMed]
- Snellen, M.; Gaida, T.C.; Koop, L.; Alevizos, E.; Simons, D.G. Performance of multibeam echosounder backscatter-based classification for monitoring sediment distributions using multitemporal large-scale ocean data sets. IEEE J. Ocean. Eng. 2018, 99, 1–14. [Google Scholar] [CrossRef]
- Hughes Clark, J.E. Multispectral Acosutic Backscatter from Multibeam, Improved Classification Potential. In Proceedings of the United States Hydrographic Conference, National Harbor, MD, USA, 15–19 March 2015. [Google Scholar]
- Brown, C.J.; Beaudoin, J.; Brissette, M.; Gazzola, V. Setting the Stage for Multispectral Acoustic Backscatter Research. In Proceedings of the United States Hydrographic Conference, Galveston, TX, USA, 20 March 2017. [Google Scholar]
- Lu, D.; Weng, Q. A survey of image classification methods and techniques for improving classification performance. Int. J. Remote Sens. 2007, 28, 823–870. [Google Scholar] [CrossRef]
- Simons, D.G.; Snellen, M. A Bayesian approach to seafloor classification using multi-beam echo-sounder backscatter data. Appl. Acoust. 2009, 70, 1258–1268. [Google Scholar] [CrossRef]
- Alevizos, E.; Snellen, M.; Simons, D.G.; Siemens, K.; Greinert, J. Acoustic discrimination of relatively homogeneous fine sediments using Bayesian classification on MBES data. Mar. Geol. 2015, 370, 31–34. [Google Scholar] [CrossRef]
- Lyons, A.P.; Abraham, D.A. Statistical characterization of high-frequency shallow-water seafloor backscatter. J. Acoust. Soc. Am. 1999, 106, 1307–1315. [Google Scholar] [CrossRef]
- Fader, G.B.J.; Miller, R.O. Surficial Geology, Halifax Harbour, Nova Scotia; Bulletin 590; Geological Survey of Canada: Ottawa, ON, Canada, 2008.
- Biffard, B.R. Seabed Remote Sensing by Single-Beam Echosounder: Models, Methods and Applications. Ph.D. Thesis, University of Victoria, Victoria, BC, Canada, 2011. [Google Scholar]
- Lurton, X.; Lamarche, G. Backscatter Measurements by Seafloor-Mapping Sonars; Guidelines and Recommendations. Technical Report. 2015. Available online: http://geohab.org/wp-content/uploads/2013/02/BWSG-REPORT-MAY2015.pdf (accessed on 29 November 2018).
- Lurton, X. Modelling of the sound field radiated by multibeam echosounders for acoustical impact assessment. Appl. Acoust. 2016, 101, 201–221. [Google Scholar] [CrossRef]
- Augustin, J.M.; Lurton, X. Image amplitude calibration and processing for seafloor mapping sonars. Eur. Oceans 2005. [Google Scholar] [CrossRef]
- Schimel, A.C.G.; Beaudoin, J.; Parnum, I.M.; Le Bas, T.; Schmidt, V.; Keith, G.; Ierodiaconou, D. Multibeam sonar backscatter data processing. Mar. Geophys. Res. 2018, 39, 121–137. [Google Scholar] [CrossRef]
- Amiri-Simkooei, A.R.; Snellen, M.; Simons, D.G. Riverbed sediment classification using multi-beam echo-sounder backscatter data. J. Acoust. Soc. Am. 2009, 126, 1724–1738. [Google Scholar] [CrossRef]
- Lurton, X. An Introduction to Underwater Acoustics; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Roche, M.; Degrendele, K.; Vrignaud, C.; Loyer, S.; Le Bas, T.; Augustin, J.M.; Lurton, X. Control of the repeatability of high frequency multibeam echosounder backscatter by using natural reference areas. Mar. Geophys. Res. 2018, 39, 89–104. [Google Scholar] [CrossRef]
- Eleftherakis, D.; Berger, L.; Le Bouffant, N.; Pacault, A.; Augustin, J.M.; Lurton, X. Backscatter calibration of high-frequency multibeam echosounder using a reference single-beam system, on natural seafloor. Mar. Geophys. Res. 2018, 39, 55–73. [Google Scholar] [CrossRef]
- Francois, R.E.; Garrison, G.R. Sound absorption based on ocean measurements. Part I: Pure water and magnesium sulfate contributions. J. Acoust. Soc. Am. 1982, 72, 896–907. [Google Scholar] [CrossRef]
- Francois, R.E.; Garrison, G.R. Sound absorption based on ocean measurements. Part II: Boric acid contribution and equation for total absorption. J. Acoust. Soc. Am. 1982, 72, 1879–1890. [Google Scholar] [CrossRef]
- Coleman, T.F.; Li, Y. On the convergence of interior-reflective Newton methods for nonlinear minimization subject to bounds. Math. Program. 1994, 67, 189–224. [Google Scholar] [CrossRef]
- Coleman, T.F.; Li, Y. An Interior, Trust Region Approach for Nonlinear Minimization Subject to Bounds. SIAM J. Optim. 1996, 6, 418–445. [Google Scholar] [CrossRef]
- Parnum, I.M.; Gavrilov, A.N. High-frequency multibeam echo-sounder measurements of seafloor backscatter in shallow water: Part 2—Mosaic production, analysis and classification. Underw. Technol. 2011, 31, 3–12. [Google Scholar] [CrossRef]
- Hamilton, E.L. Compressional-Wave Attenuation in marine sediments. Geophysics 1972, 37, 620–646. [Google Scholar] [CrossRef]
- Gaida, T.C.; Snellen, M.; van Dijk, T.A.G.P.; Simons, D.G. Geostatistical modelling of multibeam backscatter for full-coverage seabed sediment maps. Hydrobiologia 2018, 1–25. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | 100 kHz, 200 kHz, 400 kHz |
| Number of beams | 256 |
| Beam width ( and ) | 2 × 2 (100 kHz), 1 × 1 (200 kHz), × (400 kHz) |
| Swath coverage | 65 for starboard and port side |
| Nominal pulse Length | 150 s |
| Pulse type | Shaped continuous wave |
| Receiver Bandwidth B | 7500 Hz |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gaida, T.C.; Tengku Ali, T.A.; Snellen, M.; Amiri-Simkooei, A.; Van Dijk, T.A.G.P.; Simons, D.G. A Multispectral Bayesian Classification Method for Increased Acoustic Discrimination of Seabed Sediments Using Multi-Frequency Multibeam Backscatter Data. Geosciences 2018, 8, 455. https://doi.org/10.3390/geosciences8120455
Gaida TC, Tengku Ali TA, Snellen M, Amiri-Simkooei A, Van Dijk TAGP, Simons DG. A Multispectral Bayesian Classification Method for Increased Acoustic Discrimination of Seabed Sediments Using Multi-Frequency Multibeam Backscatter Data. Geosciences. 2018; 8(12):455. https://doi.org/10.3390/geosciences8120455
Chicago/Turabian StyleGaida, Timo C., Tengku Afrizal Tengku Ali, Mirjam Snellen, Alireza Amiri-Simkooei, Thaiënne A. G. P. Van Dijk, and Dick G. Simons. 2018. "A Multispectral Bayesian Classification Method for Increased Acoustic Discrimination of Seabed Sediments Using Multi-Frequency Multibeam Backscatter Data" Geosciences 8, no. 12: 455. https://doi.org/10.3390/geosciences8120455
APA StyleGaida, T. C., Tengku Ali, T. A., Snellen, M., Amiri-Simkooei, A., Van Dijk, T. A. G. P., & Simons, D. G. (2018). A Multispectral Bayesian Classification Method for Increased Acoustic Discrimination of Seabed Sediments Using Multi-Frequency Multibeam Backscatter Data. Geosciences, 8(12), 455. https://doi.org/10.3390/geosciences8120455