
Digital Technology Supporting the Remote Human-Dog Interaction: Scoping Review


Abstract
Simple Summary
Abstract
1. Introduction
1.1. Background
- What digital technologies are employed to facilitate remote human-dog interaction?
- What activities have been supported by remote human-dog interaction technology?
- What interaction modalities have been used for remote human-dog interaction systems?
- What are the types of evaluations applied to validate the technologies, and what are the primary outcomes assessed when validating remote human-dog interaction technology?
- What are the reported limitations of technology employed for remote human-dog interaction?
1.2. Objective
2. Methods
2.1. Eligibility Criteria
2.1.1. Information Sources
2.1.2. Search
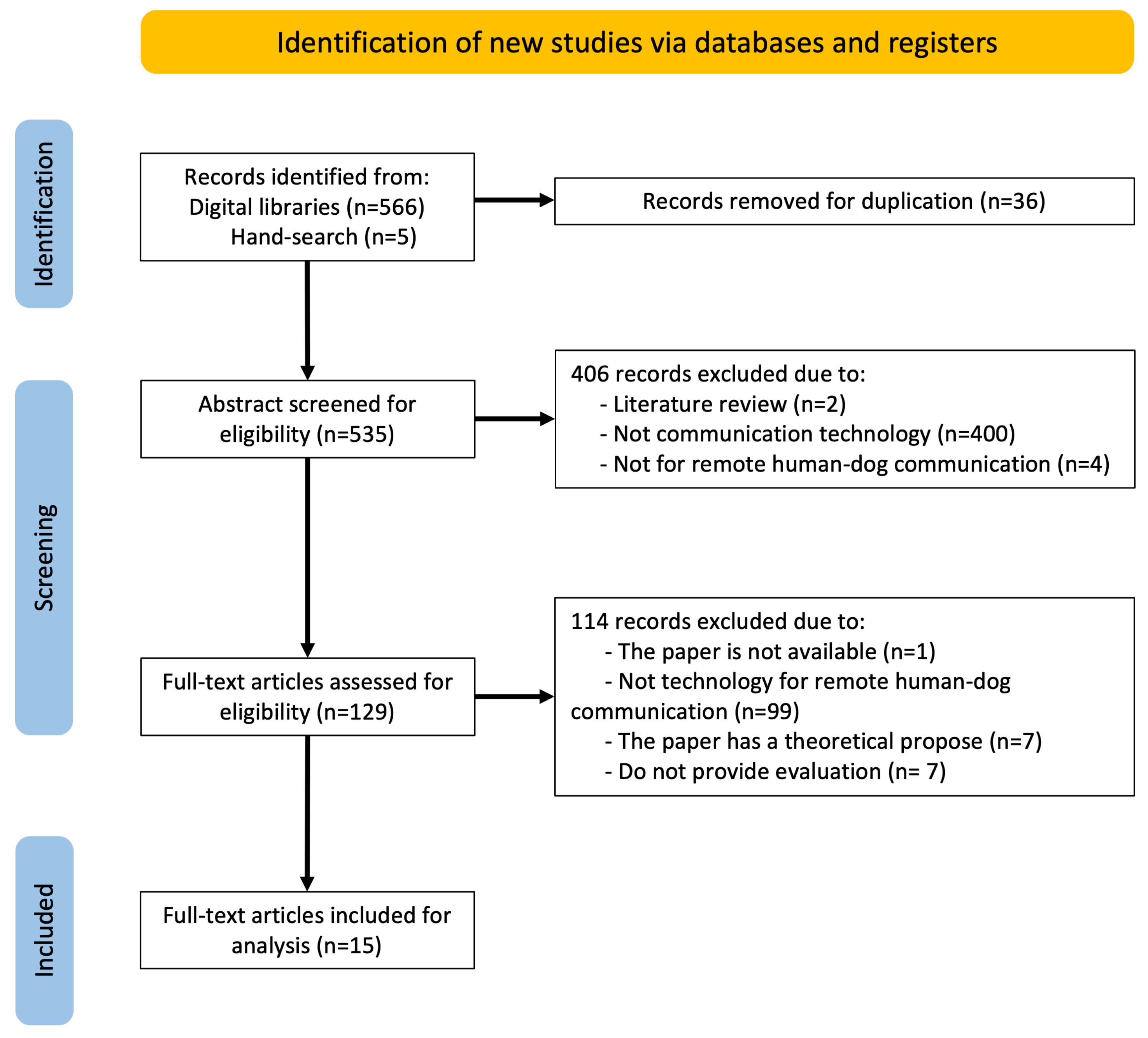
2.1.3. Study Selection
2.1.4. Data Charting and Result Synthesis
3. Results
3.1. Overview
3.2. Digital Technologies Implemented
3.2.1. Technologies for Dogs
3.2.2. Technologies for Humans
3.2.3. Technologies for Processing and Interconnection
3.3. Activities Intended to Support
3.3.1. Assistance and Service Activities
3.3.2. Seeking, Locating, and Rescuing Activities
3.3.3. Companion Activities
3.3.4. General-Purpose Activities
3.4. Interaction Modalities
3.4.1. Interaction Modalities for Dogs
3.4.2. Interaction Modalities for Humans
3.5. Evaluation Procedure and Reported Results
3.5.1. Evaluation of Technologies to Support Dogs Sending Messages
3.5.2. Evaluation of Technologies to Support Dogs Receiving Messages
3.5.3. Technologies for Bidirectional Communication
3.6. Limitations of Remote Human-Dog Communication Technology
4. Discussion
4.1. Principal Findings
4.1.1. Digital Technologies Implemented
4.1.2. Activities Supported by Remote Human-Dog Interaction Technology
4.1.3. Interaction Modalities
4.1.4. Evaluation and Results
4.1.5. Technology Limitations
4.2. Gaps in the Research
- Creation of cutting-edge new technology. Wearable technologies, touchscreens, video and audio interfaces, specialized network systems, and artificial intelligence advances must be integrated to enable future developments that allow humans and canines to execute sophisticated remote socializing and collaboration tasks more naturally.
- Integrate new cross-application research. There is a need to build technology that can be utilized easily and effectively in diverse environments or for different activities.
- Create new interaction modalities. It is necessary to build and create new dog-computer interfaces and multimodal communication systems that consider the whole range of a dog’s senses and interaction methods.
- Develop dog-centered technology. There is a need to shift the technology design paradigm in favor of one focused on the characteristics of dogs. For instance, create small and low-power devices considering the dogs’ breed, size, and body type.
5. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bekoff, M.; Allen, C. Intentional communication and social play. In Animal Play: Evolutionary, Comparative, and Ecological. Perspectives; Cambridge University Press: Cambridge, UK, 1998; pp. 97–114. [Google Scholar]
- Ma, Z.S. Towards computational models of animal communications, an introduction for computer scientists. Cogn. Syst. Res. 2015, 33, 70–99. [Google Scholar] [CrossRef]
- Pepperberg, I.M.; Pepperberg, I.M. The Alex Studies: Cognitive and Communicative Abilities of Grey Parrots; Harvard University Press: Cambridge, CA, USA, 2009. [Google Scholar]
- Herman, L.M. Can dolphins understand language? In Proceedings of the LACUS forum. Linguistic Association of Canada and the United States; Eastern Kentucky University: Richmond, KY, USA, 2007; Volume 34, pp. 3–21. [Google Scholar]
- Patterson, F.G.; Gordon, W. Twenty-seven years of Project Koko and Michael. In All Apes Great and Small; Springer: Berlin/Heidelberg, Germany, 2002; pp. 165–176. [Google Scholar]
- Wang, G.D.; Zhai, W.; Yang, H.C.; Fan, R.X.; Cao, X.; Zhong, L.; Wang, L.; Liu, F.; Wu, H.; Cheng, L.G.; et al. The genomics of selection in dogs and the parallel evolution between dogs and humans. Nat. Commun. 2013, 4, 1–9. [Google Scholar] [CrossRef]
- Kis, A.; Ciobica, A.; Topál, J. The effect of oxytocin on human-directed social behaviour in dogs (Canis familiaris). Horm. Behav. 2017, 94, 40–52. [Google Scholar] [CrossRef]
- Payne, E.; Bennett, P.C.; McGreevy, P.D. Current perspectives on attachment and bonding in the dog–human dyad. Psychol. Res. Behav. Manag. 2015, 8, 71. [Google Scholar] [CrossRef]
- Losey, R.J.; Nomokonova, T.; Fleming, L.; Latham, K.; Harrington, L. Domestication and the embodied human–dog relationship: Archaeological perspectives from Siberia. In Dogs in the North; Routledge: London, UK, 2018; pp. 8–27. [Google Scholar]
- Frantz, L.A.; Bradley, D.G.; Larson, G.; Orlando, L. Animal domestication in the era of ancient genomics. Nat. Rev. Genet. 2020, 21, 449–460. [Google Scholar] [CrossRef]
- Morey, D. Dogs: Domestication and the Development of a Social Bond; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Hare, B.; Tomasello, M. Human-like social skills in dogs? Trends Cogn. Sci. 2005, 9, 439–444. [Google Scholar] [CrossRef]
- Benjamin, A.; Slocombe, K. ‘Who’sa good boy?!’Dogs prefer naturalistic dog-directed speech. Anim. Cogn. 2018, 21, 353–364. [Google Scholar] [CrossRef]
- Olson, P.N. The modern working dog—A call for interdisciplinary collaboration. J. Am. Vet. Med Assoc. 2002, 221, 352–355. [Google Scholar] [CrossRef]
- Elgier, A.M.; Jakovcevic, A.; Barrera, G.; Mustaca, A.E.; Bentosela, M. Communication between domestic dogs (Canis familiaris) and humans: Dogs are good learners. Behav. Process. 2009, 81, 402–408. [Google Scholar] [CrossRef]
- Gee, N.R.; Rodriguez, K.E.; Fine, A.H.; Trammell, J.P. Dogs Supporting Human Health and Well-Being: A Biopsychosocial Approach. Front. Vet. Sci. 2021, 8. [Google Scholar] [CrossRef]
- Bussolari, C.; Currin-McCulloch, J.; Packman, W.; Kogan, L.; Erdman, P. I Couldn’t Have Asked for a Better Quarantine Partner: Experiences with Companion Dogs during Covid-19. Animals 2021, 11, 330. [Google Scholar] [CrossRef]
- Friedmann, E.; Thomas, S.; Eddy, T.J. Companion animals and human health. In Companion Animals and Us; Cambridge University Press: Cambridge, UK, 2000; pp. 125–142. [Google Scholar]
- Sherman, B.L.; Mills, D.S. Canine anxieties and phobias: An update on separation anxiety and noise aversions. Vet. Clin. N. Am. Small Anim. Pract. 2008, 38, 1081–1106. [Google Scholar] [CrossRef]
- Paldanius, M.; Kärkkäinen, T.; Väänänen-Vainio-Mattila, K.; Juhlin, O.; Häkkilä, J. Communication technology for human-dog interaction: Exploration of dog owners’ experiences and expectations. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011; pp. 2641–2650. [Google Scholar]
- Mancini, C. Animal-computer interaction: A manifesto. Interactions 2011, 18, 69–73. [Google Scholar] [CrossRef]
- Robinson, C.L. Animal-Computer Interaction: Designing Specialised Technology with Canine Workers; Open University: Milton Keynes, UK, 2017. [Google Scholar]
- Hirskyj-Douglas, I.; Pons, P.; Read, J.C.; Jaen, J. Seven years after the manifesto: Literature review and research directions for technologies in animal computer interaction. Multimodal Technol. Interact. 2018, 2, 30. [Google Scholar] [CrossRef]
- Jukan, A.; Masip-Bruin, X.; Amla, N. Smart Computing and Sensing Technologies for Animal Welfare: A Systematic Review. ACM Comput. Surv. 2017, 50. [Google Scholar] [CrossRef]
- Tricco, A.C.; Lillie, E.; Zarin, W.; O’Brien, K.K.; Colquhoun, H.; Levac, D.; Moher, D.; Peters, M.D.; Horsley, T.; Weeks, L.; et al. PRISMA extension for scoping reviews (PRISMA-ScR): Checklist and explanation. Ann. Intern. Med. 2018, 169, 467–473. [Google Scholar] [CrossRef]
- Britt, W.R.; Miller, J.; Waggoner, P.; Bevly, D.M.; Hamilton, J.A. An embedded system for real-time navigation and remote command of a trained canine. Pers. Ubiquitous Comput. 2011, 15, 61–74. [Google Scholar] [CrossRef]
- Golbeck, J.; Neustaedter, C. Pet video chat: Monitoring and interacting with dogs over distance. In Proceedings of the ACM CHI’12 Extended Abstracts on Human Factors in Computing Systems, Austin, TX, USA, 5–10 May 2012; pp. 211–220. [Google Scholar]
- Lemasson, G.; Pesty, S.; Duhaut, D. Increasing communication between a man and a dog. In Proceedings of the 2013 IEEE 4th International Conference on Cognitive Infocommunications (CogInfoCom), Budapest, Hungary, 2–5 December 2013; pp. 145–148. [Google Scholar]
- Jackson, M.M.; Valentin, G.; Freil, L.; Burkeen, L.; Zeagler, C.; Gilliland, S.; Currier, B.; Starner, T. FIDO—Facilitating interactions for dogs with occupations: Wearable communication interfaces for working dogs. Pers. Ubiquitous Comput. 2015, 19, 155–173. [Google Scholar] [CrossRef]
- Valentin, G.; Alcaidinho, J.; Howard, A.; Jackson, M.M.; Starner, T. Towards a canine-human communication system based on head gestures. In Proceedings of the 12th International Conference on Advances in Computer Entertainment Technology, Iskandar, Malaysia, 16–19 November 2015; pp. 1–9. [Google Scholar]
- Robinson, C.; Mancini, C.; van der Linden, J.; Guest, C.; Swanson, L.; Marsden, H.; Valencia, J.; Aengenheister, B. Designing an emergency communication system for human and assistance dog partnerships. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Osaka, Japan, 7–11 September 2015; pp. 337–347. [Google Scholar]
- Alcaidinho, J.; Valentin, G.; Abowd, G.D.; Jackson, M. Training collar-sensed gestures for canine communication. In Proceedings of the Third International Conference on Animal-Computer Interaction, Milton Keynes, UK, 15–17 November 2016; pp. 1–4. [Google Scholar]
- Zeagler, C.; Byrne, C.; Valentin, G.; Freil, L.; Kidder, E.; Crouch, J.; Starner, T.; Jackson, M.M. Search and rescue: Dog and handler collaboration through wearable and mobile interfaces. In Proceedings of the Third International Conference on Animal-Computer Interaction, Milton, Keynes, 15–17 November 2016; pp. 1–9. [Google Scholar]
- Rossi, A.P.; Rodriguez, S.; Cardoso dos Santos, C.R. A dog using skype. In Proceedings of the Third International Conference on Animal-Computer Interaction, Milton, Keynes, 15–17 November 2016; pp. 1–4. [Google Scholar]
- Zeagler, C.; Zuerndorfer, J.; Lau, A.; Freil, L.; Gilliland, S.; Starner, T.; Jackson, M.M. Canine computer interaction: Towards designing a touchscreen interface for working dogs. In Proceedings of the Third International Conference on Animal-Computer Interaction, Milton, Keynes, 15–17 November 2016; pp. 1–5. [Google Scholar]
- Morrison, A.; Møller, R.H.; Manresa-Yee, C.; Eshraghi, N. The impact of training approaches on experimental setup and design of wearable vibrotactiles for hunting dogs. In Proceedings of the Third International Conference on Animal-Computer Interaction, Milton, Keynes, 15–17 November 2016; pp. 1–10. [Google Scholar]
- Byrne, C.; Freil, L.; Starner, T.; Jackson, M.M. A method to evaluate haptic interfaces for working dogs. Int. J. Hum.-Comput. Stud. 2017, 98, 196–207. [Google Scholar] [CrossRef]
- Byrne, C.; Zeagler, C.; Freil, L.; Rapoport, A.; Jackson, M.M. Dogs using touchscreens in the home: A case study for assistance dogs operating emergency notification systems. In Proceedings of the Fifth International Conference on Animal-Computer Interaction, Atlanta, GA, USA, 4–6 December 2018; pp. 1–10. [Google Scholar]
- Golan, Y.; Serota, B.; Shapiro, A.; Shriki, O.; Nisky, I. A vibrotactile vest for remote human-dog communication. In Proceedings of the 2019 IEEE World Haptics Conference (WHC), Tokyo, Japan, 9–12 July 2019; pp. 556–561. [Google Scholar]
- Hirskyj-Douglas, I.; Piitulainen, R.; Lucero, A. Forming the Dog Internet: Prototyping a Dog-to-Human Video Call Device. In Proceedings of the ACM International Conference on Interactive Surfaces and Spaces, Lodz, Poland, 14–17 November 2021; pp. 1–20. [Google Scholar]
- Parenti, L.; Foreman, A.; Meade, B.J.; Wirth, O. A revised taxonomy of assistance animals. J. Rehabil. Res. Dev. 2013, 50, 745. [Google Scholar] [CrossRef]
- Zeagler, C.; Gilliland, S.; Freil, L.; Starner, T.; Jackson, M. Going to the dogs: Towards an interactive touchscreen interface for working dogs. In Proceedings of the 27th Annual ACM Symposium on User Interface Software and Technology, Honolulu, HI, USA, 5–8 October 2014; pp. 497–507. [Google Scholar]
- Howell, T.J.; Nieforth, L.; Thomas-Pino, C.; Samet, L.; Agbonika, S.; Cuevas-Pavincich, F.; Fry, N.E.; Hill, K.; Jegatheesan, B.; Kakinuma, M.; et al. Defining terms used for animals working in support roles for people with support needs. Animals 2022, 12, 1975. [Google Scholar] [CrossRef]


{kind=link}
| Characteristic | Studies, n (%) |
|---|---|
| Interfaces for dogs | |
| To generate messages | |
| Touchscreen | 2(13) |
| Bite sensor | 1(7) |
| Tug sensor | 1(7) |
| Gesture sensor, bite sensor, tug sensor | 1(10) |
| Gesture sensor | 2(13) |
| To receive messages | |
| Vibrotactile | 3(20) |
| Audio | 1(7) |
| Audio and vibrotactile | 1(7) |
| To generate and receive messages | |
| Videochat | 2(13) |
| Videochat and bite sensor | 1(7) |
| Interfaces for humans | |
| To generate messages | |
| Mobile application | 3(20) |
| Handheld transmitter | 1(7) |
| To receive messages | |
| Mobile applications | 3(20) |
| To generate and receive messages | |
| Videochat | 3(20) |
| Do not show human interface | 5(15) |
| Activities addressed | |
| Search-and-rescue | 5(33) |
| Assistance | 5(33) |
| Companion | 3(20) |
| General purpose | 2(14) |
| Interaction modalities for dogs | |
| Haptic | 8(53) |
| Haptic and sound | 1(7) |
| Video and sound | 2(13) |
| Sound | 1(7) |
| Wearable | 2(13) |
| Video, sound and haptic | 1(7) |
| Evaluation protocol | |
| Pilot study with dogs | 14(93) |
| Pilot study with trainers | 1(7) |
| Technology | Year | Main Functionalities | Dog Activities Addressed | Message Direction | Dog Interaction Modality | Evaluation Protocol | Dog Training Sessions | Main Reported Results |
|---|---|---|---|---|---|---|---|---|
| 1. Harness with sensors and actuators [26] | 2011 | Vest that allows handlers to command and track a trained canine in real-time using a sensor suite and a tone generator. | Search-and-rescue | Human to Dog | Haptic and sound-Vibrations and audio commands | Pilot test-1 dog | The dog had previous field/hunt trials and explosive detection training. The dog was trained to respond to tones and vibrations, but no training session details are provided. | The system can use data from the canine’s sensors to provide audio and vibration commands and control signals to autonomously guide the dog to destinations and send information to the handler. |
| 2. PC with Skype [27] | 2012 | Video chat system that augments a Skype audio-video connection with remote interaction features. | Companion | Bidirectional | Video and sound | Pilot test-10 dogs | Authors do not mention the dog’s previous training. The dogs were trained to interact with the screen but no training session details are provided. | They demonstrated the potential of pet-based videochat systems that enable owners to watch their pets while not at home and communicate with them via audio and visuals, promoting animal engagement. |
| 3. Harness with speakers [28] | 2013 | Vest allowing to command the dog through an embedded voice and recognizes some activities of the dog: walk, seat, run, lying. | General | Human to Dog | Hearing commands | Pilot test-1 dog | The participant dog was already familiar with the basic vocal commands. The authors do not specify a training period. | They demonstrated that dogs obey recorded vocal commands. Furthermore, using their system, the handler can remotely monitor the dog’s activity. |
| 4. Harness with sensors [29] | 2015 | Five different haptic sensors that dogs could activate based on natural dog behaviors such as biting, tugging, and nose touches. | General | Dog to Human | Haptic-Bit, tug, and nose gestures | Pilot test-3 dogs | The dogs had previous assistance training. No more than four sessions per day, with a 30-min break in between, were held for sensor-specific training, and each session lasted no longer than 15 min. | It is feasible to design wearables that canine handlers can dependably activate. 100% of the commands transmitted through capacitive and pneumatic sensors resulted in successful activations for all eight dogs. |
| 5. Collar with sensors [30] | 2015 | Collar that detects gestures using a motion sensor. Each gesture is paired with a predetermined message that is voiced to the handler by a smartphone. | Search-and-rescue | Dog to Human | Gestures recognition | Pilot test-3 dogs | The dogs had previous training in alert, assistance, and police tasks. The gesture training occurred in at most four 30-min long sessions for each dog. | The authors demonstrated that working dogs could use gestures (spin, twirl, right sequence, left sequence) to communicate with humans. The results when evaluating the gestures recognition collar were not totally satisfactory since important aspects to improve in the design were detected. |
| 6. Trigger that activates an alarm upon detachment [31] | 2015 | Alarm system that enables assistance dogs to call for help using a detaching component that the dog could pull off to trigger the alarm. | Assistance | Dog to Human | Haptic-Pulling rope | Pilot test-4 dogs | All dogs in this study already knew how to ’tug’ and retrieve on command. The dogs were trained to use the mechanism but no training session details are provided. | The main contribution was the set of lessons learned from the particular design application and design process that included the dogs, their owners, and trainers in the process. |
| 7. Harness with movement sensors [32] | 2016 | Collar that senses gestures using an inertial measurement unit and relays specific alerts to a smartphone application. | Assistance | Dog to Human | Gestures recognition | Pilot test-2 dogs | Only one dog had previous experience with gestures. Each training session lasted at most 10 min. The learning time for each gesture varied depending on the dog’s prior training experience but did not exceed 15 training sessions per gesture. | Dogs were successfully trained to perform gestures. However, the sensing harness was not evaluated. After training, dogs could continue to make the signals without the harness, but less precisely. Dogs still recall the gesture when prompted with a verbal and physical cue over three months. |
| 8. Harness with bite sensor [33] | 2016 | Wearable bite sensor for search-and-rescue dogs that communicates with their handler via a mobile application. | Search-and-rescue | Dog to Human | Haptic- bite | Pilot test-3 trainers | The dogs had previous training in search and rescue. A dog was trained to use the vest, but no training session details are provided. | Three K9-Search and Rescue experts evaluated the system. They recommended improvements to the vest for durability, visibility, and connectivity to the handler; and improvements to the app regarding mapping, iconography, and annotation. |
| 9. PC with Skype [34] | 2016 | Video call interactions with the dog and a treat dispenser triggered to release food from a distant location. | Companion | Bidirectional | Video and sound | Pilot test-1 dog | The dog was trained to correctly respond to verbal cues requested through Skype, but no training session details are provided. | The video capability not only gives the owner the option to check on their pet frequently to ensure that it is safe, but it also allows them to engage in meaningful communication with the pet. |
| 10. Touchscreen [35] | 2016 | Touchscreen interfaces usable for assistance dogs in the home. Validation of interaction techniques such as lift-off selection and sliding gestural motions. | Assistance | Dog to Human | Haptic-Nose touching | Pilot test-5 dogs | The dogs were trained in a 15–20 min sessions with at least 30 min rest between each training session. | The most effective technology for canine interaction is infrared touchscreens with backing projection monitors. The most efficient training technique for touchscreen interactions involving tapping is shaping. Luring can be used successfully to train sliding/gestural interactions at first, but it should be swiftly replaced with shaping. |
| 11. Harness with vibrator [36] | 2016 | Harness to provide vibrotactile commands to dogs, working with variable-intensity vibrating motors mounted to a modified hug shirt. | Search-and-rescue | Human to Dog | Haptic-vibrations | Pilot test-4 dogs | The dogs had previous hunting, track, and obedience training. A dog was trained to correctly respond to vibrotactile cues, but no training session details are provided. | The authors tested the design of the vest and vibrating actuators. They concluded that it is crucial to correctly identify previous training methods and prepare modified experimental settings that consider each dog’s learning experience. |
| 12. Harness with vibrator [37] | 2017 | Vest with vibration actuators at different points on the dog body that is evaluated measuring the working dog’s ability to perform distinct tasks. | Assistance | Dog to Human | Haptic- vibrations in shoulders and bite | Pilot test-11 dogs | The dogs had diverse previous training. Training sessions were no more than fifteen minutes long. Each dog had no more than four training sessions per day, with at least thirty minutes between them. Training sessions were conducted until the dog mastered the haptic cue. | They demonstrated that canines can be taught to react to haptic stimuli. Over 93% of haptic cues resulted in the dog reporting perceiving the cue, for the highest power level of vibration. Not surprisingly, the lower power levels resulted in lower Dog Response Rates, with the lowest power level under 57%. |
| 13. Touchscreen [38] | 2018 | Touchscreens mounted in the home triggered by the dog interaction to alert in emergencies. | Assistance | Dog to Human | Haptic-Nose touch | Pilot test-3 dogs | The dogs had diverse previous training and diverse experience with touchscreens. Dogs require less than 40 min of total training time, spread out over less than a week. | Dogs can be taught to use their noses to press a sequence of touchscreen icons to signal a medical emergency in less than a week with just five-minute training sessions each day. Dogs can locate the touchscreen from different rooms and only activate the touchscreen only when given the training cue. |
| 14. Harness with vibrator [39] | 2019 | Harness embedded with vibration motors associating four different types of vibrations with different commands. | Search-and-rescue | Human to Dog | Haptic-vibrations in shoulders | Pilot test-1 dog | The dogs had never received any formal training. The dog was trained to correctly respond to vibrotactile cues, but no training session details are provided. | Vibrotactile indications successfully directed dogs to carry out several tasks (turn around, lie down, approach handler, walk backward). Dogs responded well to a single haptic command, matching their vocal command sensitivity. |
| 15. PC with Skype and bite sensor [40] | 2021 | Video call device to allow a dog to remotely call their human, giving the animal control and agency over technology in their home. | Companion | Bidiectional | Haptic, video and sound | Pilot test-1 dog | The dog had no previous professional training but had previous technology experience with screen devices and motion and facial trackers. The trainer performs five use demonstration actions to teach the dog how to use the ball to call. | Thanks to the system, dogs could video call their human whenever and wherever they wanted. The experimental design provided knowledge on how to create Internet of Things systems using canines. Through prototyping, dogs were incorporated into the early stages of design. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Vizzuett, L.; Espinosa-Curiel, I.E.; Pérez-Espinosa, H. Digital Technology Supporting the Remote Human-Dog Interaction: Scoping Review. Animals 2023, 13, 699. https://doi.org/10.3390/ani13040699
Rodríguez-Vizzuett L, Espinosa-Curiel IE, Pérez-Espinosa H. Digital Technology Supporting the Remote Human-Dog Interaction: Scoping Review. Animals. 2023; 13(4):699. https://doi.org/10.3390/ani13040699
Chicago/Turabian StyleRodríguez-Vizzuett, Liliana, Ismael E. Espinosa-Curiel, and Humberto Pérez-Espinosa. 2023. "Digital Technology Supporting the Remote Human-Dog Interaction: Scoping Review" Animals 13, no. 4: 699. https://doi.org/10.3390/ani13040699
APA StyleRodríguez-Vizzuett, L., Espinosa-Curiel, I. E., & Pérez-Espinosa, H. (2023). Digital Technology Supporting the Remote Human-Dog Interaction: Scoping Review. Animals, 13(4), 699. https://doi.org/10.3390/ani13040699