
Multibody Computer Model of the Entire Equine Forelimb Simulates Forces Causing Catastrophic Fractures of the Carpus during a Traditional Race

 , , ,
, , ,  ,
, 
 and
and 
Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Input Data
2.1.1. CT Scan
2.1.2. Micro-Computed Tomography (µCT)
2.1.3. In Vivo Kinematic Measurements
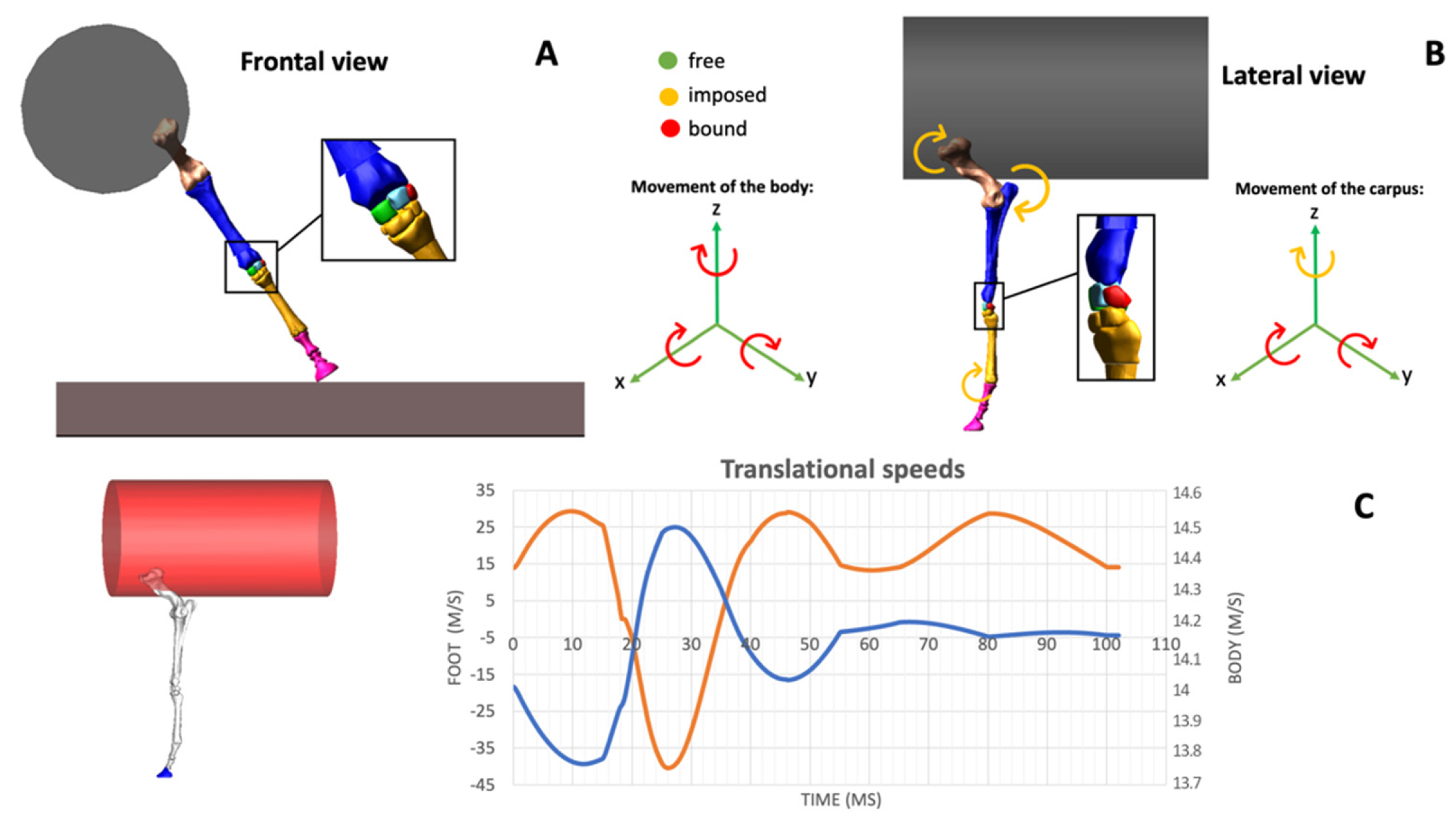
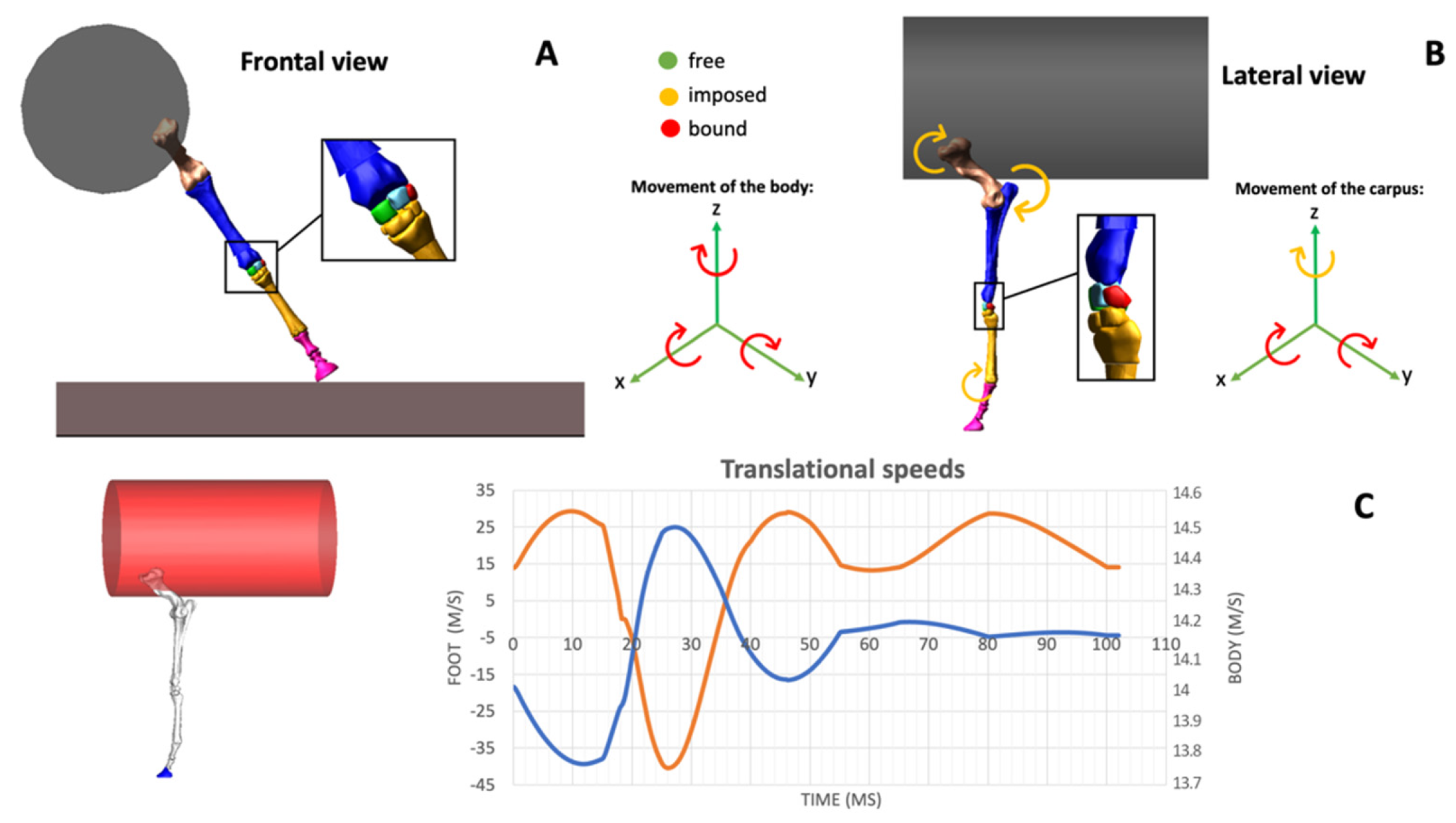
2.2. Computation Modelling
2.3. Pathology
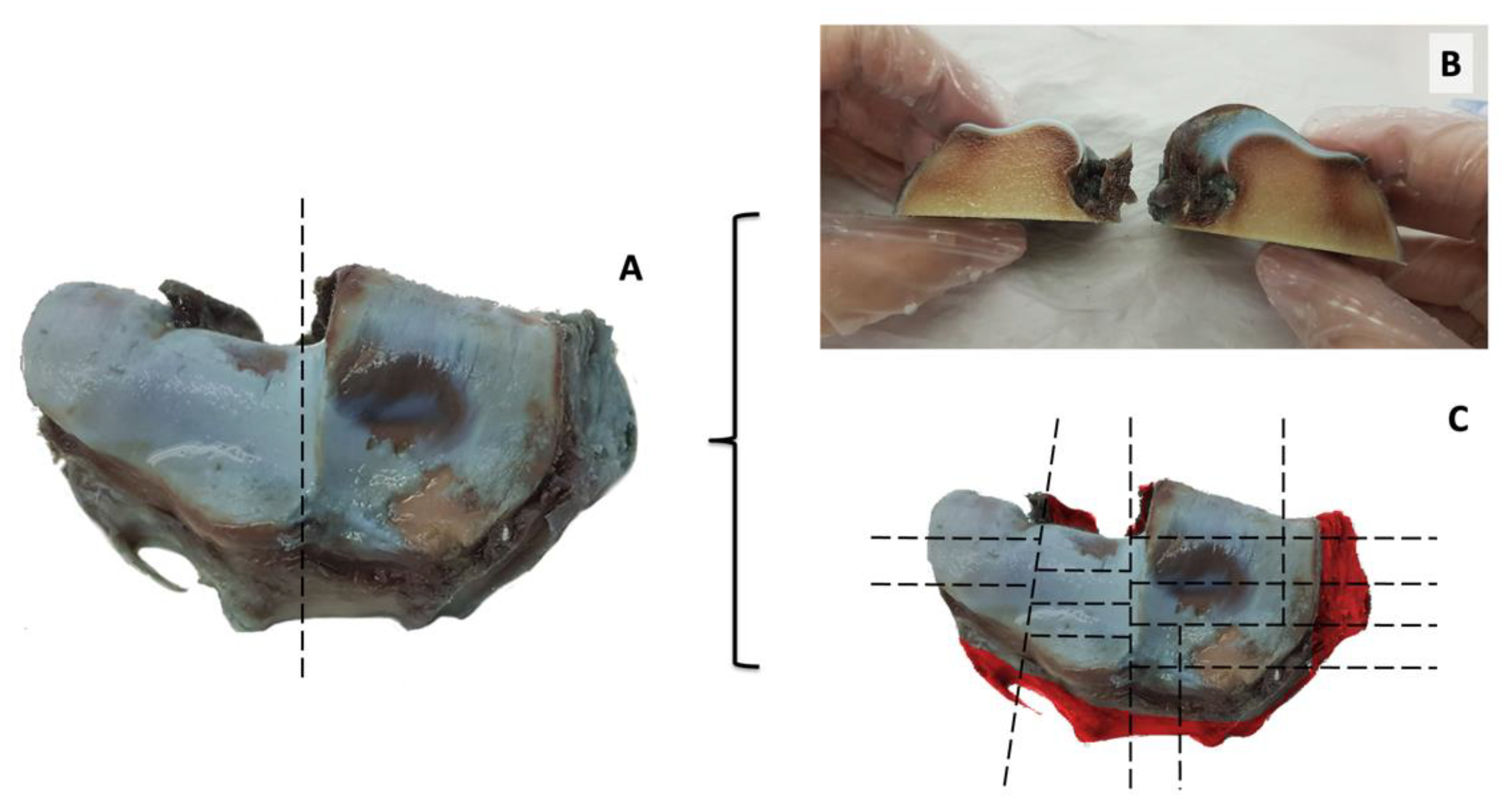
2.3.1. Macroscopic Evaluation of the Specimen
2.3.2. Histopathology
3. Results
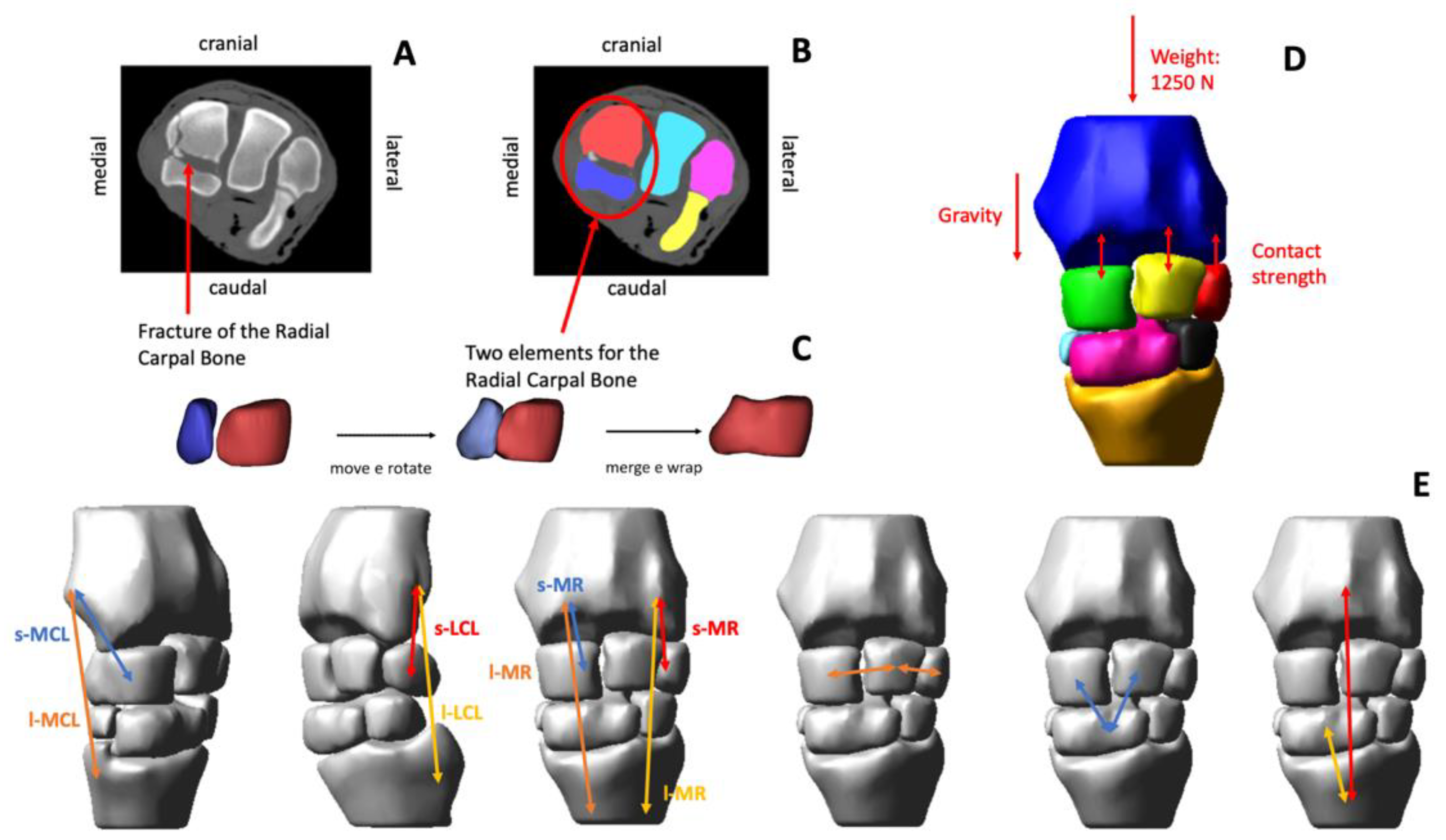
3.1. Radiology and CT Scan
3.2. Computation Modelling
3.3. Pathology
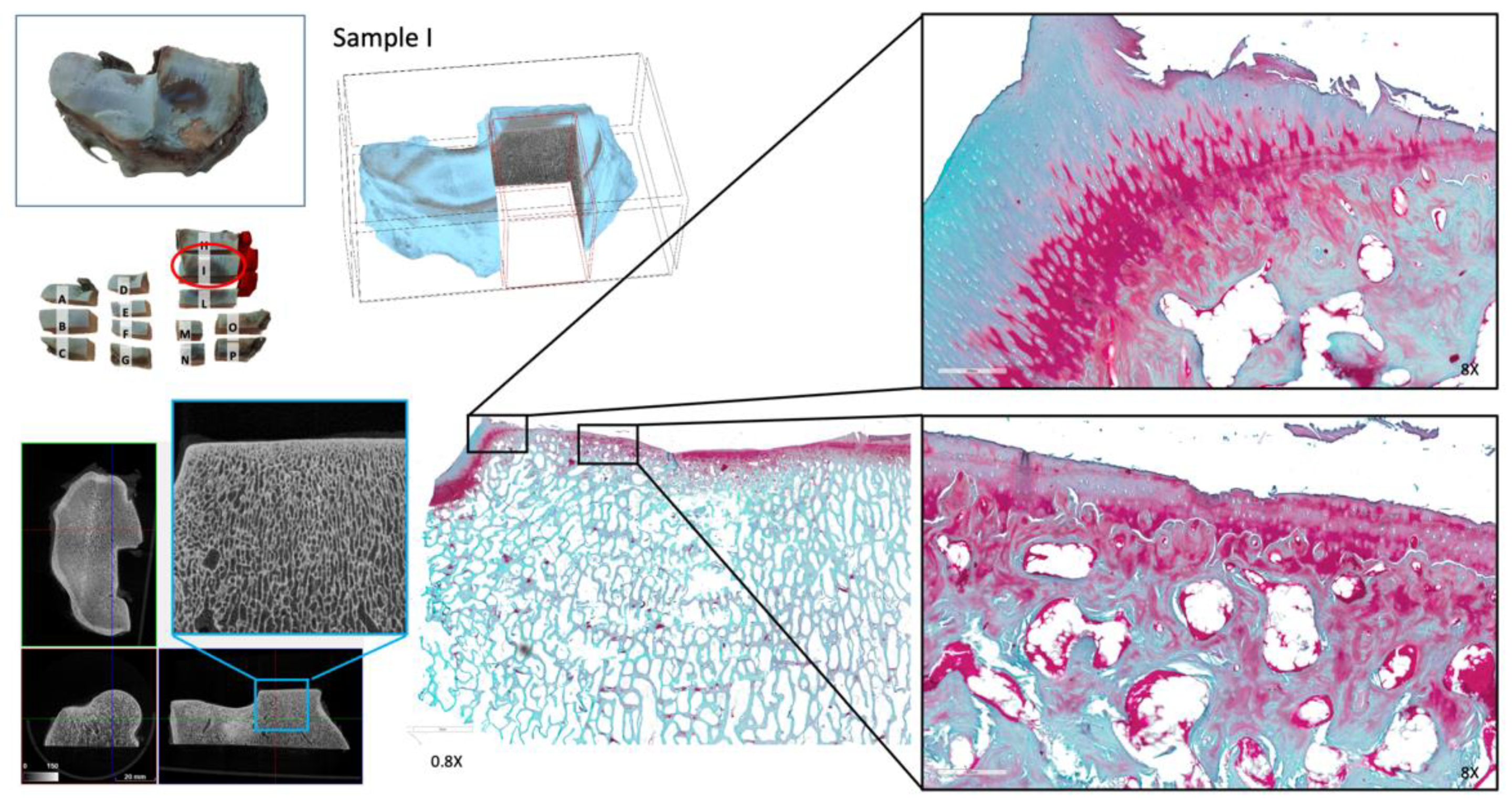
3.3.1. Qualitative and Quantitative µCT Analysis
3.3.2. Histopathology
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Mathematical Detail of the Model
Spring Element Implementation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | k (N) | lo (mm) |
|---|---|---|
| l-MCL | 48,000 | 102.0 |
| l-LCL | 48,000 | 105.9 |
| l-MR | 10,000 | 106.9 |
| l-LR | 10,000 | 107.2 |
| s-MCL | 24,000 | 51.4 |
| s-LCL | 24,000 | 50.0 |
| s-MR | 1000 | 53.0 |
| s-LR | 1000 | 42.4 |
Appendix A.2. Bushing Element Implementation
| Connected Bodies | K11 (N/mm) | K22 (N/mm) | K33 (N/mm) | K44 (N/°) | K55 (N/°) | K66 (N/°) | C11 (Ns/mm) | C22 (Ns/mm) | C33 (Ns/mm) | C44 (Ns/°) | C55 (Ns/°) | C66 (Ns/°) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Metacarpus—Radius #1 * | 1 | 1 | 1 | 10 | 10 | 10 | 0 | 0 | 0 | 0 | 0 | 0 |
| Metacarpus—Radius #2 * | 0 | 0 | 0 | 5 | 5 | 5 | 0 | 0 | 0 | 0 | 0 | 0 |
| Metacarpus—Radius #3 * | 0 | 0 | 0 | 50 | 50 | 50 | 0 | 0 | 0 | 0 | 0 | 0 |
| C3—Cu | 3000 | 1000 | 3000 | 15 | 15 | 15 | 3000 | 3000 | 500 | 15 | 15 | 15 |
| C3—Ci | 500 | 500 | 500 | 4 | 4 | 4 | 3000 | 3000 | 500 | 15 | 15 | 15 |
| C3—Cr | 1000 | 1000 | 500 | 5 | 5 | 5 | 3000 | 3000 | 500 | 15 | 15 | 15 |
| C3—Metacarpus | 1500 | 1500 | 1500 | 15 | 15 | 15 | 3000 | 3000 | 3000 | 15 | 15 | 15 |
| Ci—Cu | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2000 | 0 | 0 | 0 |
| Ci—Cr | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2000 | 1 | 1 | 1 |
Appendix A.3. Contact Implementation
| Contact Pair | Aggregate Modulus H (MPa) | Young’s Modulus E (MPa) | Poisson’s Ratio ν | Area A (mm2) | Cartilage Thickness s (mm) | Max Damping Cmax (Ns/mm) | Max Penetration δmax (mm) | Power Exponent e | Stiffness Kc (N/mm) |
|---|---|---|---|---|---|---|---|---|---|
| Radius—Cr | 1.58 | 1.38 | 0.22 | 958.7 | 2.23 | 30 | 0.1 | 8.4 | 955.6 |
| Radius—Ci | 1.42 | 1.29 | 0.19 | 845.9 | 2.16 | 30 | 0.1 | 11.65 | 855.8 |
| Radius—Cu | 1.62 | 1.34 | 0.26 | 347.8 | 2.20 | 30 | 0.1 | 12.35 | 343.2 |
| Contact Pair | Max Damping Cmax (Ns/mm) | Max Penetration δmax (mm) | Power Exponent e | Static Friction Coefficient | Dynamic Friction Coefficient | Stiffness Kc (N/mm) |
|---|---|---|---|---|---|---|
| Limb—Ground | 150 | 20 | 2.2 | 0.58 | 0.46 | 20,000 |
References
- Pista del Palio di Siena. Wikipedia. Available online: https://it.wikipedia.org/wiki/Palio_di_Siena (accessed on 16 January 2021).
- Mahaffey, C.A.; Peterson, M.L.; Roepstorff, L. The Effects of Varying Cushion Depth on Dynamic Loading in Shallow Sand Thoroughbred Horse Dirt Racetracks. Biosyst. Eng. 2013, 114, 178–186. [Google Scholar] [CrossRef]
- Peterson, M.; Sanderson, W.; Kussainov, N.; Hobbs, S.J.; Miles, P.; Scollay, M.C.; Clayton, H.M. Effects of Racing Surface and Turn Radius on Fatal Limb Fractures in Thoroughbred Racehorses. Sustainability 2021, 13, 539. [Google Scholar] [CrossRef]
- Parkin, T.D.H.; French, N.P.; Riggs, C.M.; Morgan, K.L.; Clegg, P.D.; Proudman, C.J.; Singer, E.R.; Webbon, P.M. Risk of Fatal Distal Limb Fractures among Thoroughbreds Involved in the Five Tpes of Racing in the United Kingdom. Vet. Rec. 2004, 154, 493–497. [Google Scholar] [CrossRef] [PubMed]
- van den Bogert, A.J.; Schamhardt, H.C.; Crowe, A. Simulation of Quadrupedal Locomotion Using a Rigid Body Model. J. Biomech. 1989, 22, 33–41. [Google Scholar] [CrossRef]
- Zarucco, L.; Swanstrom, M.D.; Driessen, B.; Hawkins, D.; Hubbard, M.; Steffey, E.P.; Stover, S.M. An in Vivo Equine Forelimb Model for Short-Term Recording of Peak Isometric Force in the Superficial and Deep Digital Flexor Muscles. Vet. Surg. 2003, 32, 439–450. [Google Scholar] [CrossRef] [PubMed]
- Lawson, S.E.M.; Chateau, H.; Pourcelot, P.; Denoix, J.-M.; Crevier-Denoix, N. Sensitivity of an Equine Distal Limb Model to Perturbations in Tendon Paths, Origins and Insertions. J. Biomech. 2007, 40, 2510–2516. [Google Scholar] [CrossRef] [PubMed]
- Putame, G.; Terzini, M.; Bignardi, C.; Beale, B.; Hulse, D.; Zanetti, E.; Audenino, A. Surgical Treatments for Canine Anterior Cruciate Ligament Rupture: Assessing Functional Recovery Through Multibody Comparative Analysis. Front. Bioeng. Biotechnol. 2019, 7, 180. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Terzini, M.; Zanetti, E.M.; Audenino, A.L.; Putame, G.; Gastaldi, L.; Pastorelli, S.; Panero, E.; Sard, A.; Bignardi, C. Multibody Modelling of Ligamentous and Bony Stabilizers in the Human Elbow. Muscles Ligaments Tendons J. 2018, 7, 493–502. [Google Scholar] [CrossRef]
- Swanstrom, M.D.; Zarucco, L.; Hubbard, M.; Stover, S.M.; Hawkins, D.A. Musculoskeletal Modeling and Dynamic Simulation of the Thoroughbred Equine Forelimb During Stance Phase of the Gallop. J. Biomech. Eng. 2004, 127, 318–328. [Google Scholar] [CrossRef]
- Back, W.; Schamhardt, H.C.; Barneveld, A. Kinematic Comparison of the Leading and Trailing Fore- and Hindlimbs at the Canter. Equine Vet. J. 1997, 29, 80–83. [Google Scholar] [CrossRef]
- Blankevoort, L.; Kuiper, J.H.; Huiskes, R.; Grootenboer, H.J. Articular Contact in a Three-Dimensional Model of the Knee. J. Biomech. 1991, 24, 1019–1031. [Google Scholar] [CrossRef] [Green Version]
- Budras, K.D.; Röck, S.; Jahrmärker, G.; Horowitz, A.; Berg, R. Anatomy of the Horse, 5th ed.; Schluetersche: Berlin, Germany, 2009; ISBN 978-3-89993-044-3. [Google Scholar]
- Dyce, K.M. Libro Di Anatomia Veterinaria; Antonio Delfino Editore: Bologna, Italy, 2013; Volume 1, ISBN 978-88-7287-465-3. [Google Scholar]
- Schmitz, N.; Laverty, S.; Kraus, V.B.; Aigner, T. Basic Methods in Histopathology of Joint Tissues. Osteoarthr. Cartil. 2010, 18, S113–S116. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McIlwraith, C.W.; Frisbie, D.D.; Kawcak, C.E.; Fuller, C.J.; Hurtig, M.; Cruz, A. The OARSI Histopathology Initiative—Recommendations for Histological Assessments of Osteoarthritis in the Horse. Osteoarthr. Cartil. 2010, 18, S93–S105. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bardin, A.L.; Tang, L.; Panizzi, L.; Rogers, C.W.; Colborne, G.R. Development of An Anybody Musculoskeletal Model of The Thoroughbred Forelimb. J. Equine Vet. Sci. 2021, 103, 103666. [Google Scholar] [CrossRef] [PubMed]
- Harrison, S.M.; Whitton, R.C.; Kawcak, C.E.; Stover, S.M.; Pandy, M.G. Relationship between Muscle Forces, Joint Loading and Utilization of Elastic Strain Energy in Equine Locomotion. J. Exp. Biol. 2010, 213, 3998–4009. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Malekipour, F.; Whitton, R.C.; Lee, P.V.-S. Distribution of Mechanical Strain in Equine Distal Metacarpal Subchondral Bone: A MicroCT-Based Finite Element Model. Med. Nov. Technol. Devices 2020, 6, 100036. [Google Scholar] [CrossRef]
- Merritt, J.S.; Pandy, M.G.; Brown, N.A.T.; Burvill, C.R.; Kawcak, C.E.; McIlwraith, C.W.; Davies, H.M.S. Mechanical Loading of the Distal End of the Third Metacarpal Bone in Horses during Walking and Trotting. Am. J. Vet. Res. 2010, 71, 508–514. [Google Scholar] [CrossRef] [PubMed]
- Palmer, J.L.; Bertone, A.L.; Litsky, A.S. Contact Area and Pressure Distribution Changes of the Equine Third Carpal Bone during Loading. Equine Vet. J. 1994, 26, 197–202. [Google Scholar] [CrossRef] [PubMed]
- Martig, S.; Chen, W.; Lee, P.V.S.; Whitton, R.C. Bone Fatigue and Its Implications for Injuries in Racehorses: Bone Fatigue in Racehorses. Equine Vet. J. 2014, 46, 408–415. [Google Scholar] [CrossRef] [PubMed]
- Tidswell, H.K.; Innes, J.F.; Avery, N.C.; Clegg, P.D.; Barr, A.R.S.; Vaughan-Thomas, A.; Wakley, G.; Tarlton, J.F. High-Intensity Exercise Induces Structural, Compositional and Metabolic Changes in Cuboidal Bones—Findings from an Equine Athlete Model. Bone 2008, 43, 724–733. [Google Scholar] [CrossRef] [PubMed]
- Parkin, T.D.H.; Clegg, P.D.; French, N.P.; Proudman, C.J.; Riggs, C.M.; Singer, E.R.; Webbon, P.M.; Morgan, K.L. Catastrophic Fracture of the Lateral Condyle of the Third Metacarpus/Metatarsus in UK Racehorses—Fracture Descriptions and Pre-Existing Pathology. Vet. J. 2006, 171, 157–165. [Google Scholar] [CrossRef] [PubMed]
- Ueda, Y.; Yoshida, K.; Oikawa, M. Analyses of Race Accident Conditions through Use of Patrol Video. J. Equine Vet. Sci. 1993, 13, 707–710. [Google Scholar] [CrossRef]
- Kallerud, A.S.; Hernlund, E.; Byström, A.; Persson-Sjodin, E.; Rhodin, M.; Hendrickson, E.H.S.; Fjordbakk, C.T. Non-Banked Curved Tracks Influence Movement Symmetry in Two-Year-Old Standardbred Trotters. Equine Vet. J. 2020, 53, 1178–1187. [Google Scholar] [CrossRef] [PubMed]
- Parkes, R.S.V.; Pfau, T.; Weller, R.; Witte, T.H. The Effect of Curve Running on Distal Limb Kinematics in the Thoroughbred Racehorse. PLoS ONE 2020, 15, e0244105. [Google Scholar] [CrossRef] [PubMed]
- Brocklehurst, C.; Weller, R.; Pfau, T. Effect of Turn Direction on Body Lean Angle in the Horse in Trot and Canter. Vet. J. 2014, 199, 258–262. [Google Scholar] [CrossRef] [PubMed]
- Hobbs, S.J.; Richards, J.; Matuszewski, B.; Brigden, C. Development and Evaluation of a Noninvasive Marker Cluster Technique to Assess Three-Dimensional Kinematics of the Distal Portion of the Forelimb in Horses. Am. J. Vet. Res. 2006, 67, 1511–1518. [Google Scholar] [CrossRef] [PubMed]
- Williams, D.E.; Norris, B.J. Laterality in Stride Pattern Preferences in Racehorses. Anim. Behav. 2007, 74, 941–950. [Google Scholar] [CrossRef]
- Dendorfer, S.; Maier, H.J.; Taylor, D.; Hammer, J. Anisotropy of the Fatigue Behaviour of Cancellous Bone. J. Biomech. 2008, 41, 636–641. [Google Scholar] [CrossRef] [PubMed]
- Rossdale, P.D.; Hopes, R.; Digby, N.J. Epidemiological Study of Wastage among Racehorses 1982 and 1983. Vet. Rec. 1985, 116, 66–69. [Google Scholar] [CrossRef] [PubMed]
- Martig, S.; Hitchens, P.L.; Lee, P.V.S.; Whitton, R.C. The Relationship between Microstructure, Stiffness and Compressive Fatigue Life of Equine Subchondral Bone. J. Mech. Behav. Biomed. Mater. 2020, 101, 103439. [Google Scholar] [CrossRef] [PubMed]
- Radin, E.L.; Parker, H.G.; Pugh, J.W.; Steinberg, R.S.; Paul, I.L.; Rose, R.M. Response of Joints to Impact Loading—III: Relationship between Trabecular Microfractures and Cartilage Degeneration. J. Biomech. 1973, 6, 51–57. [Google Scholar] [CrossRef]
- Lynch, M.E.; Main, R.P.; Xu, Q.; Schmicker, T.L.; Schaffler, M.B.; Wright, T.M.; van der Meulen, M.C.H. Tibial Compression Is Anabolic in the Adult Mouse Skeleton despite Reduced Responsiveness with Aging. Bone 2011, 49, 439–446. [Google Scholar] [CrossRef] [Green Version]
- Browner, B.D. Skeletal Trauma: Basic Science, Management, and Reconstruction; Elsevier Health Sciences: London, UK, 2009; ISBN 978-1-4160-2220-6. [Google Scholar]
- DeGoede, K.M.; Ashton-Miller, J.A.; Schultz, A.B. Fall-Related Upper Body Injuries in the Older Adult: A Review of the Biomechanical Issues. J. Biomech. 2003, 36, 1043–1053. [Google Scholar] [CrossRef]
- Bramlage, L.R.; Schneider, R.K.; Gabel, A.A. A Clinical Perspective on Lameness Originating in the Carpus. Equine Vet. J. 1988, 20, 12–18. [Google Scholar] [CrossRef] [PubMed]
- Deane, N.J.; Davies, A.S. The Function of the Equine Carpal Joint: A Review. N. Z. Vet. J. 1995, 43, 45–47. [Google Scholar] [CrossRef] [PubMed]


| Grade 1 | Intact surface (Surfaces are normal and smooth in appearance and did not retain Indian ink) |
| Grade 2 | Minimal fibrillation (Surface retains Indian ink as elongated specks or light-grey patches) |
| Grade 3 | Overt fibrillation (Area were velvety in appearance and retains Indian ink as intense black patches) |
| Grade 4 | Erosion (Area of cartilage exposing the underlying subchondral bone) |
| Grade 0 Intact cartilage surface and intact cartilage morphology |
| Grade 1 Surface fibrillation |
| Grade 2 Surface discontinuity |
| Grade 3 Wear lines in the cartilage |
| Grade 4 Cartilage erosion |
| Grade 5 Cartilage denudation |
 | Trabecular Bone | Cartilage | |||||||
| VOI | BV/TV | Tb.Th | Tb.SP | Tb.N | Tb.Pf | SMI | Da | C.th | |
| % | μm | μm | μm (min-max) | ||||||
| Total | 40.76 | 309.44 | 507.32 | 1.32 | −0.19 | −0.09 | 0.54 | ||
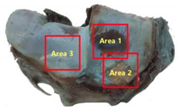
| Area 1 | 35.4 | 199.89 | 514.88 | 1.77 | −0.44 | 0.15 | 0.32 | 224.59 (76.78–579.90) | |
| Area 2 | 51.52 | 334.81 | 423.31 | 1.54 | −2.44 | −1.37 | 0.4 | 312.29 (99.61–567.29) | |
| Area 3 | 41.21 | 273.97 | 515.78 | 1.5 | -0.73 | -0.35 | 0.56 | 629.83 (319.86–825.79) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pagliara, E.; Pasinato, A.; Valazza, A.; Riccio, B.; Cantatore, F.; Terzini, M.; Putame, G.; Parrilli, A.; Sartori, M.; Fini, M.; et al. Multibody Computer Model of the Entire Equine Forelimb Simulates Forces Causing Catastrophic Fractures of the Carpus during a Traditional Race. Animals 2022, 12, 737. https://doi.org/10.3390/ani12060737
Pagliara E, Pasinato A, Valazza A, Riccio B, Cantatore F, Terzini M, Putame G, Parrilli A, Sartori M, Fini M, et al. Multibody Computer Model of the Entire Equine Forelimb Simulates Forces Causing Catastrophic Fractures of the Carpus during a Traditional Race. Animals. 2022; 12(6):737. https://doi.org/10.3390/ani12060737
Chicago/Turabian StylePagliara, Eleonora, Alvise Pasinato, Alberto Valazza, Barbara Riccio, Federica Cantatore, Mara Terzini, Giovanni Putame, Annapaola Parrilli, Maria Sartori, Milena Fini, and et al. 2022. "Multibody Computer Model of the Entire Equine Forelimb Simulates Forces Causing Catastrophic Fractures of the Carpus during a Traditional Race" Animals 12, no. 6: 737. https://doi.org/10.3390/ani12060737
APA StylePagliara, E., Pasinato, A., Valazza, A., Riccio, B., Cantatore, F., Terzini, M., Putame, G., Parrilli, A., Sartori, M., Fini, M., Zanetti, E. M., & Bertuglia, A. (2022). Multibody Computer Model of the Entire Equine Forelimb Simulates Forces Causing Catastrophic Fractures of the Carpus during a Traditional Race. Animals, 12(6), 737. https://doi.org/10.3390/ani12060737