Impact of Weight Carriage on Joint Kinematics in Asian Elephants Used for Riding

 , ,
, , 
Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Animal Ethical Consent
2.2. Study Animals
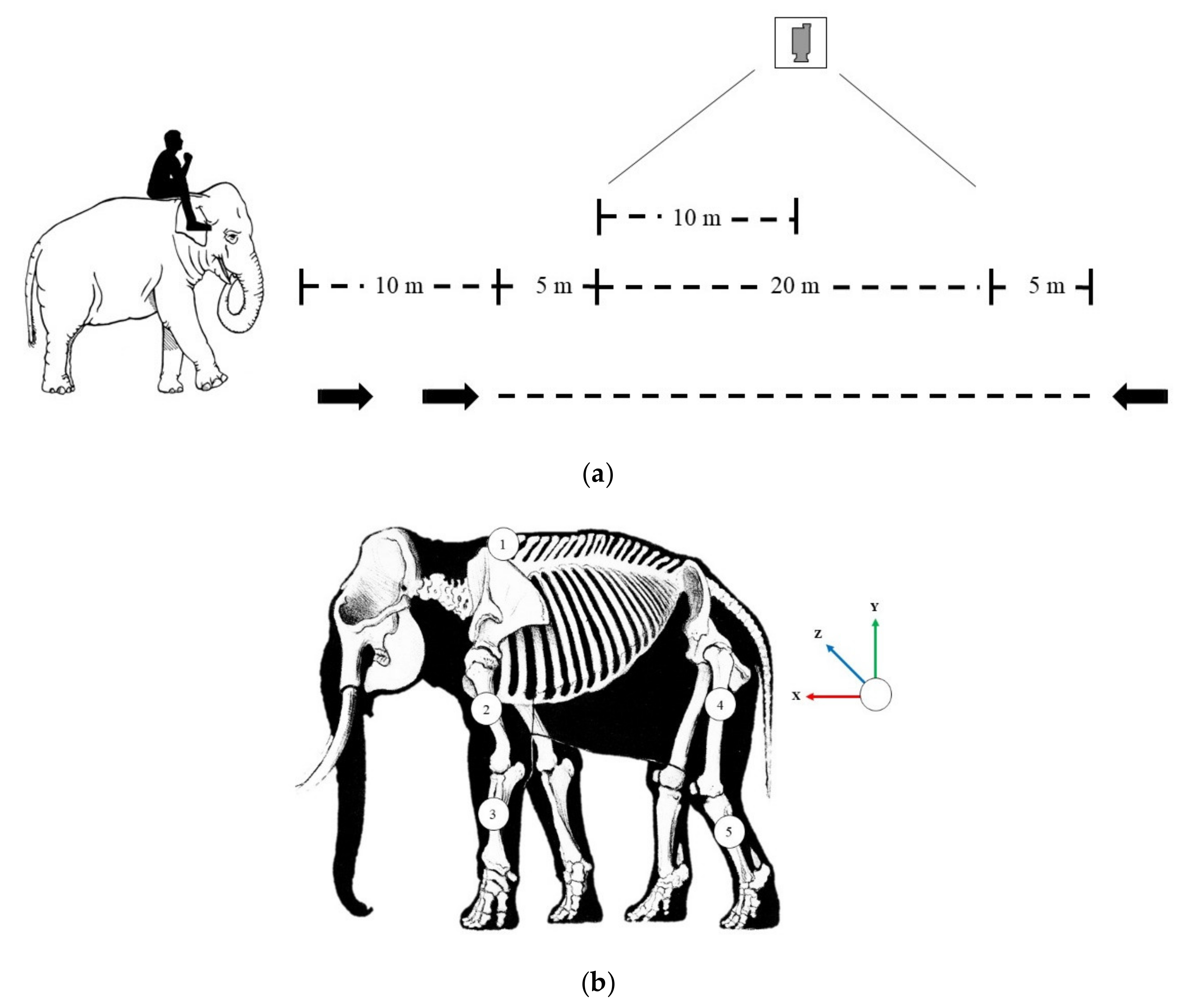
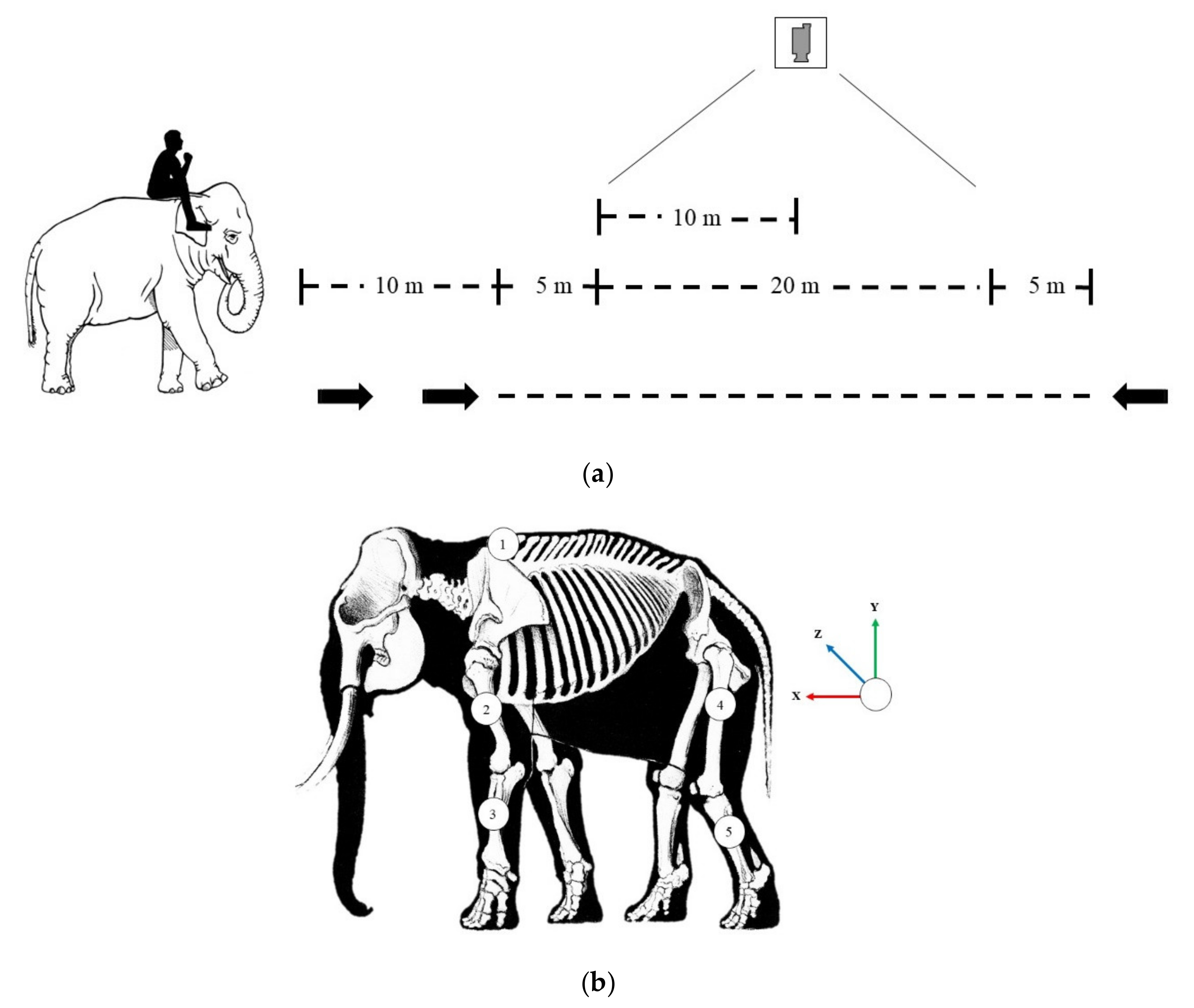
2.3. Experimental Design
2.4. Data Collection and Analysis
2.5. Statistical Analysis
3. Results
Angle of Movement during a Gait Cycle
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bansiddhi, P.; Brown, J.L.; Thitaram, C.; Punyapornwithaya, V.; Nganvongpanit, K. Elephant Tourism in Thailand: A Review of Animal Welfare Practices and Needs. J. Appl. Anim. Welf. Sci. 2019, 23, 164–177. [Google Scholar] [CrossRef] [PubMed]
- Bansiddhi, P.; Brown, J.L.; Thitaram, C.; Punyapornwithaya, V.; Somgird, C.; Edwards, K.L.; Nganvongpanit, K. Changing trends in elephant camp management in northern Thailand and implications for welfare. PeerJ 2018, 6, e5996. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ministry of Agriculture and Co-operative. Elephant Welfare Management in Camp under the Prevention of Cruelty and Animal Welfare Provision Act. 2020. Available online: http://www.ratchakitcha.soc.go.th/DATA/PDF/2563/E/296/T_0022.PDF (accessed on 20 April 2021).
- Simpson, K.M.; Munro, B.J.; Steele, J. Backpack load affects lower limb muscle activity patterns of female hikers during prolonged load carriage. J. Electromyogr. Kinesiol. 2011, 21, 782–788. [Google Scholar] [CrossRef]
- Majumdar, D.; Pal, M.S.; Majumdar, D. Effects of military load carriage on kinematics of gait. Ergonomics 2010, 53, 782–791. [Google Scholar] [CrossRef]
- Simpson, K.M.; Munro, B.J.; Steele, J. Effects of prolonged load carriage on ground reaction forces, lower limb kinematics and spatio-temporal parameters in female recreational hikers. Ergonomics 2012, 55, 316–326. [Google Scholar] [CrossRef] [PubMed]
- Attwells, R.L.; Birrell, S.; Hooper, R.H.; Mansfield, N.J. Influence of carrying heavy loads on soldiers’ posture, movements and gait. Ergonomics 2006, 49, 1527–1537. [Google Scholar] [CrossRef] [Green Version]
- Ozgul, B. Effects of unilateral backpack carriage on biomechanics of gait in adolescents: A kinematic analysis. Acta Orthop. Traumatol. Turc. 2012, 46, 269–274. [Google Scholar] [CrossRef]
- De Cocq, P.; van Weeren, P.R.; Back, W. Effects of girth, saddle and weight on movements of the horse. Equine Vet. J. 2004, 36, 758–763. [Google Scholar] [CrossRef]
- Gunnarsson, V.; Stefánsdóttir, G.J.; Jansson, A.; Roepstorff, L. The effect of rider weight and additional weight in Icelandic horses in tölt: Part II. Stride parameters responses. Anim. Int. J. Anim. Biosci. 2017, 11, 1567–1572. [Google Scholar] [CrossRef] [Green Version]
- Hyung, E.-J.; Lee, H.-O.; Kwon, Y.-J. Influence of load and carrying method on gait, specifically pelvic movement. J. Phys. Ther. Sci. 2016, 28, 2059–2062. [Google Scholar] [CrossRef] [Green Version]
- Birrell, S.A.; Hooper, R.H.; Haslam, R. The effect of military load carriage on ground reaction forces. Gait Posture 2007, 26, 611–614. [Google Scholar] [CrossRef] [Green Version]
- Kongsawasdi, S.; Mahasawangkul, S.; Pongsopawijit, P.; Boonprasert, K.; Chuatrakoon, B.; Thonglorm, N. Biomechanical parameters of Asian elephant (Elephas maximus) walking gait. Kafkas Univ. Vet. Fak. Derg. 2017, 23, 357–362. [Google Scholar]
- Holler, P.J.; Brazda, V.; Dal-Bianco, B.; Lewy, E.; Mueller, M.C.; Peham, C.; Bockstahler, B.A. Kinematic motion analysis of the joints of the forelimbs and hind limbs of dogs during walking exercise regimens. Am. J. Veter Res. 2010, 71, 734–740. [Google Scholar] [CrossRef]
- Hutchinson, J.R.; Schwerda, D.; Famini, D.J.; Dale, R.H.I.; Fischer, M.S.; Kram, R. The locomotor kinematics of Asian and African elephants: Changes with speed and size. J. Exp. Biol. 2006, 209, 3812–3827. [Google Scholar] [CrossRef] [Green Version]
- Wijesooriya, P.N.; Abeykoon, A.H.S.; Udawatta, L.; Punchihewa, A.; Nanayakkara, T. Gait pattern analysis of an Asian elephant. In Proceedings of the 6th International Conference on Information and Automation for Sustainability (ICIAFS), Beijing, China, 27–29 September 2012; Institute of Electrical and Electronics Engineers: Beijing, China, 2012; pp. 221–226. [Google Scholar]
- Peansukmanee, S.; Thawinchai, N.; Khanproa, P.; Khaminluang, P. Feasibility study of inertial sensor technology on ponies for equine-assisted therapy (EAT). Kafkas Univ. Vet. Fak. Derg. 2017, 23, 871–878. [Google Scholar]
- Keegan, K.G.; Yonezawa, Y.; Pai, P.F.; Wilson, D.A.; Kramer, J. Evaluation of a sensor-based system of motion analysis for detection and quantification of forelimb and hind limb lameness in horses. Am. J. Vet. Res. 2004, 65, 665–670. [Google Scholar] [CrossRef]
- McCracken, M.J.; Kramer, J.; Keegan, K.G.; Lopes, M.; Wilson, D.A.; Reed, S.K.; Lacarrubba, A.; Rasch, M. Comparison of an inertial sensor system of lameness quantification with subjective lameness evaluation. Equine Veter. J. 2012, 44, 652–656. [Google Scholar] [CrossRef]
- Ren, L.; Miller, C.E.; Lair, R.; Hutchinson, J. Integration of biomechanical compliance, leverage, and power in elephant limbs. Proc. Natl. Acad. Sci. USA 2010, 107, 7078–7082. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ren, L.; Hutchinson, J. The three-dimensional locomotor dynamics of African (Loxodonta africana) and Asian (Elephas maximus) elephants reveal a smooth gait transition at moderate speed. J. R. Soc. Interface 2007, 5, 195–211. [Google Scholar] [CrossRef] [Green Version]
- Garlinghouse, S.E.; Burrill, M.J. Relationship of body condition score to completion rate during 160 km endurance races. Equine Veter. J. 2010, 31, 591–595. [Google Scholar] [CrossRef]
- Matsuura, A.; Irimajiri, M.; Matsuzaki, K.; Hiraguri, Y.; Nakanowatari, T.; Yamazaki, A.; Hodate, K. Method for estimating maximum permissible load weight for Japanese native horses using accelerometer-based gait analysis. Anim. Sci. J. Nihon Chikusan Gakkaiho 2013, 84, 75–81. [Google Scholar] [CrossRef]
- Powell, D.M.; Bennett-Wimbush, K.; Peeples, A.; Duthie, M. Evaluation of Indicators of Weight-Carrying Ability of Light Riding Horses. J. Equine Veter Sci. 2008, 28, 28–33. [Google Scholar] [CrossRef]
- Christensen, J.W.; Bathellier, S.; Rhodin, M.; Palme, R.; Uldahl, M. Increased Rider Weight Did Not Induce Changes in Behavior and Physiological Parameters in Horses. Animals 2020, 10, 95. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Morales-Acosta, L.; Ortiz-Prado, A.; Jacobo-Armendáriz, V.H.; González-Carbonell, R.A. Analysis and characterization of the normal gait phases of walking Warmblood horses as a tool for the diagnosis of lameness. Pesqui Vet. Bras. 2018, 38, 536–543. [Google Scholar] [CrossRef] [Green Version]
- Stefánsdóttir, G.J.; Gunnarsson, V.; Roepstorff, L.; Ragnarsson, S.; Jansson, A. The effect of rider weight and additional weight in Icelandic horses in tölt: Part I. Physiological responses. Animal 2017, 11, 1558–1566. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Clayton, H.; Lanovaz, J.; Schamhardt, H.C.; Wessum, R. Rider effects on ground reaction forces and fetlock kinematics at the trot. Equine Vet. J. Suppl. 1999, 30, 218–221. [Google Scholar]
- Kinoshita, H. Effects of different loads and carrying systems on selected biomechanical parameters describing walking gait. Ergonomics 1985, 28, 1347–1362. [Google Scholar] [CrossRef]
- Demur, T.; Demura, S.-I. Relationship among gait parameters while walking with varying loads. J. Physiol. Anthr. 2010, 29, 29–34. [Google Scholar] [CrossRef] [Green Version]
- Liew, B.; Morris, S.; Netto, K. The effect of backpack carriage on the biomechanics of walking: A systematic re-view and preliminary meta-analysis. J. Appl. Biomech. 2016, 32, 614–629. [Google Scholar] [CrossRef] [PubMed]
- Griffin, T.M.; Main, R.P.; Farley, C.T. Biomechanics of quadrupedal walking: How do four-legged animals achieve inverted pendulum-like movements? J. Exp. Biol. 2004, 207, 3545–3558. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cavagna, G.; Heglund, N.C.; Taylor, C.R. Mechanical work in terrestrial locomotion: Two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. Integr. Comp. Physiol. 1977, 233, R243–R261. [Google Scholar] [CrossRef] [PubMed]
- Genin, J.J.; Willems, P.A.; Cavagna, G.; Lair, R.; Heglund, N.C. Biomechanics of locomotion in Asian elephants. J. Exp. Biol. 2010, 213, 694–706. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ren, L.; Butler, M.; Miller, C.; Paxton, H.; Schwerda, D.; Fischer, M.S.; Hutchinson, J.R. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 2008, 211 Pt 17, 2735–2751. [Google Scholar] [CrossRef] [Green Version]
- Norkaew, T.; Brown, J.L.; Thitaram, C.; Bansiddhi, P.; Somgird, C.; Punyapornwithaya, V.; Punturee, K.; Vongchan, P.; Somboon, N.; Khonmee, J. Associations among tourist camp management, high and low tourist seasons, and welfare factors in female Asian elephants in Thailand. PLoS ONE 2019, 14, e0218579. [Google Scholar] [CrossRef]
- Bansiddhi, P.; Brown, J.L.; Khonmee, J.; Norkaew, T.; Nganvongpanit, K.; Punyapornwithaya, V.; Angkawanish, T.; Somgird, C.; Thitaram, C. Management factors affecting adrenal glucocorticoid activity of tourist camp elephants in Thailand and implications for elephant welfare. PLoS ONE 2019, 14, e0221537. [Google Scholar] [CrossRef] [Green Version]
- Martin, P.; Cheze, L.; Pourcelot, P.; Desquilbet, L.; Duray, L.; Chateau, H. Effects of the rider on the kinematics of the equine spine under the saddle during the trot using inertial measurement units: Methodological study and preliminary results. Veter. J. 2017, 221, 6–10. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
| ID. | Age (yr)) | Sex | Height (cm) | Body Mass (kg) | Weight Added (kg) 1 |
|---|---|---|---|---|---|
| EM1 | 21 | Female | 280 | 3425 | 523 |
| EM2 | 36 | Female | 240 | 3450 | 525 |
| EM3 | 51 | Female | 232 | 3200 | 493 |
| EM4 | 31 | Female | 250 | 3280 | 493 |
| EM5 | 31 | Female | 235 | 3146 | 472 |
| EM6 | 20 | Male | 270 | 3120 | 468 |
| EM7 | 36 | Male | 260 | 3386 | 507 |
| EM8 | 41 | Female | 230 | 3112 | 467 |
| Mean | 33.4 | 249.6 | 3264.9 | 493.5 | |
| SD | 10.2 | 18.7 | 140.2 | 23.5 |
| Angle | Forelimb (Degree) | Hindlimb (Degree) | |||||
|---|---|---|---|---|---|---|---|
| No Load | 15% Load | p-Value | No Load | 15% Load | p-Value | ||
| Proximal Flexion | 16.71 ± 3.05 | 20.13 ± 2.42 | 0.401 | 16.65 ± 3.28 | 17.00 ± 2.38 | 0.575 | |
| Proximal Extension | 23.88 ± 4.44 | 21.90 ± 3.37 | 0.779 | 21.87 ± 3.47 | 22.32 ± 3.40 | 0.889 | |
| Distal Flexion | 14.90 ± 2.35 | 19.47 ± 2.94 | 0.327 | 11.58 ± 1.93 | 16.73 ± 1.44 | 0.484 | |
| Distal Extension | 20.63 ±9.74 | 12.57 ± 2.82 | 0.161 | 15.49 ± 2.00 | 12.72 ± 1.67 | 0.674 | |
| Angle | Forelimb (Degree) | Hindlimb (Degree) | ||||
|---|---|---|---|---|---|---|
| No Load | 15% Load | p-Value | No Load | 15% Load | p-Value | |
| Adduction | 22.10 ± 3.24 | 23.54 ± 3.65 | 0.401 | 24.53 ± 1.96 | 24.97 ± 3.64 | 0.779 |
| Abduction | 19.47 ± 2.14 | 16.24 ± 3.28 | 0.575 | 17.97 ± 2.27 | 18.28 ± 3.39 | 0.674 |
| Internal rotation | 18.81 ± 3.71 | 20.18 ± 3.42 | 0.674 | 15.83 ± 3.74 | 17.73 ± 2.54 | 0.484 |
| External rotation | 18.54 ± 2.18 | 19.59 ± 1.99 | 0.327 | 16.93 ± 2.91 | 15.83 ± 3.87 | 0.484 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kongsawasdi, S.; Brown, J.L.; Boonprasert, K.; Pongsopawijit, P.; Wantanajittikul, K.; Khammesri, S.; Tajarernmuang, T.; Thonglorm, N.; Kanta-In, R.; Thitaram, C. Impact of Weight Carriage on Joint Kinematics in Asian Elephants Used for Riding. Animals 2021, 11, 2423. https://doi.org/10.3390/ani11082423
Kongsawasdi S, Brown JL, Boonprasert K, Pongsopawijit P, Wantanajittikul K, Khammesri S, Tajarernmuang T, Thonglorm N, Kanta-In R, Thitaram C. Impact of Weight Carriage on Joint Kinematics in Asian Elephants Used for Riding. Animals. 2021; 11(8):2423. https://doi.org/10.3390/ani11082423
Chicago/Turabian StyleKongsawasdi, Siriphan, Janine L. Brown, Khajohnpat Boonprasert, Pornsawan Pongsopawijit, Kittichai Wantanajittikul, Siripat Khammesri, Tanapong Tajarernmuang, Nipaporn Thonglorm, Rungtiwa Kanta-In, and Chatchote Thitaram. 2021. "Impact of Weight Carriage on Joint Kinematics in Asian Elephants Used for Riding" Animals 11, no. 8: 2423. https://doi.org/10.3390/ani11082423
APA StyleKongsawasdi, S., Brown, J. L., Boonprasert, K., Pongsopawijit, P., Wantanajittikul, K., Khammesri, S., Tajarernmuang, T., Thonglorm, N., Kanta-In, R., & Thitaram, C. (2021). Impact of Weight Carriage on Joint Kinematics in Asian Elephants Used for Riding. Animals, 11(8), 2423. https://doi.org/10.3390/ani11082423