In this section, four-quadrant operating principles of the SPC and double pump-controlled asymmetric cylinder (DPC) are introduced. Furthermore, the velocity fluctuations under four-quadrant operation are analyzed and compared. Additionally, the four-quadrant operating of the arm cylinder of a micro-excavator is illustrated, which is employed as a load for the simulation study.
2.1. Working Principle and Velocity Fluctuation Analysis under Four-Quadrant Operation
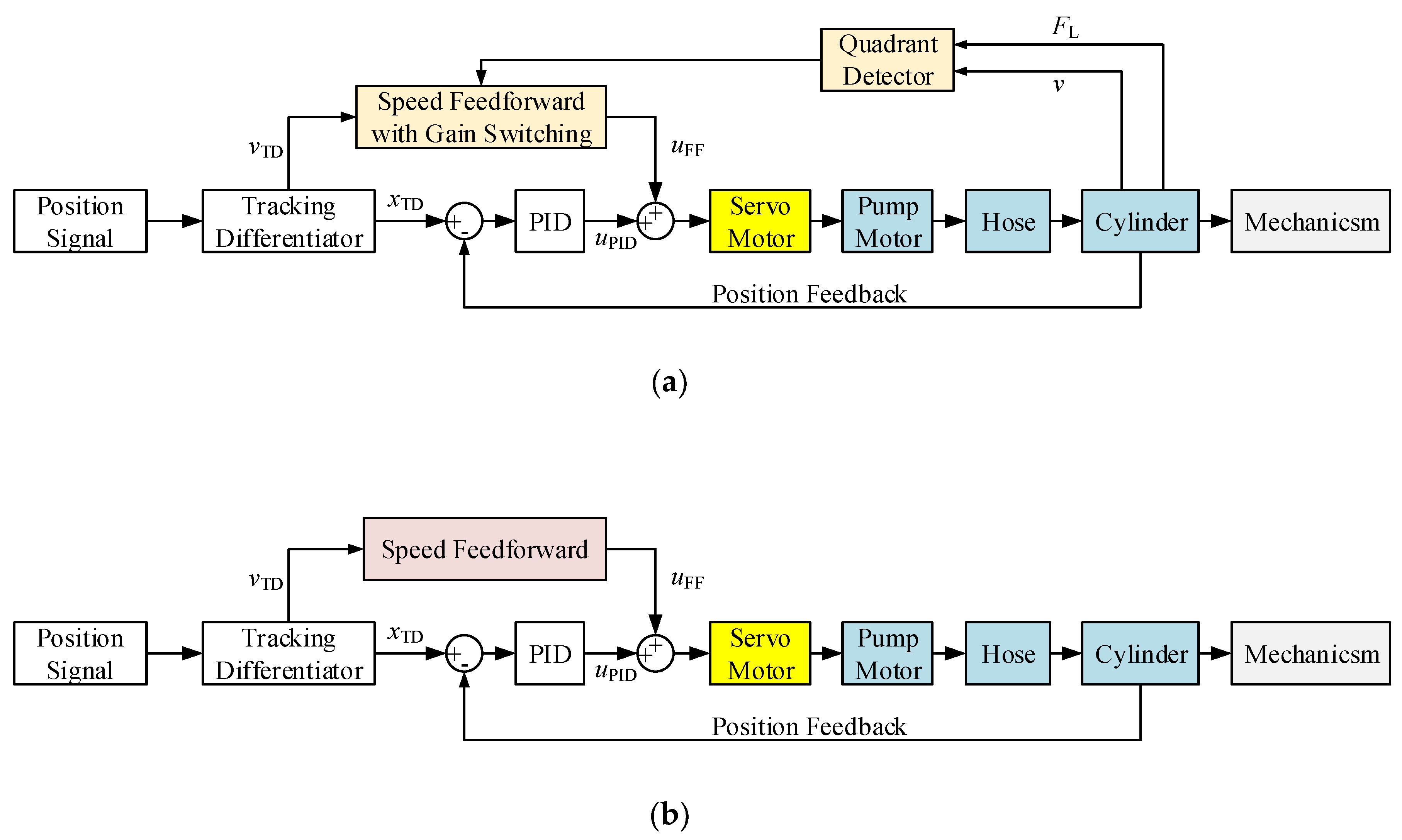
As shown in
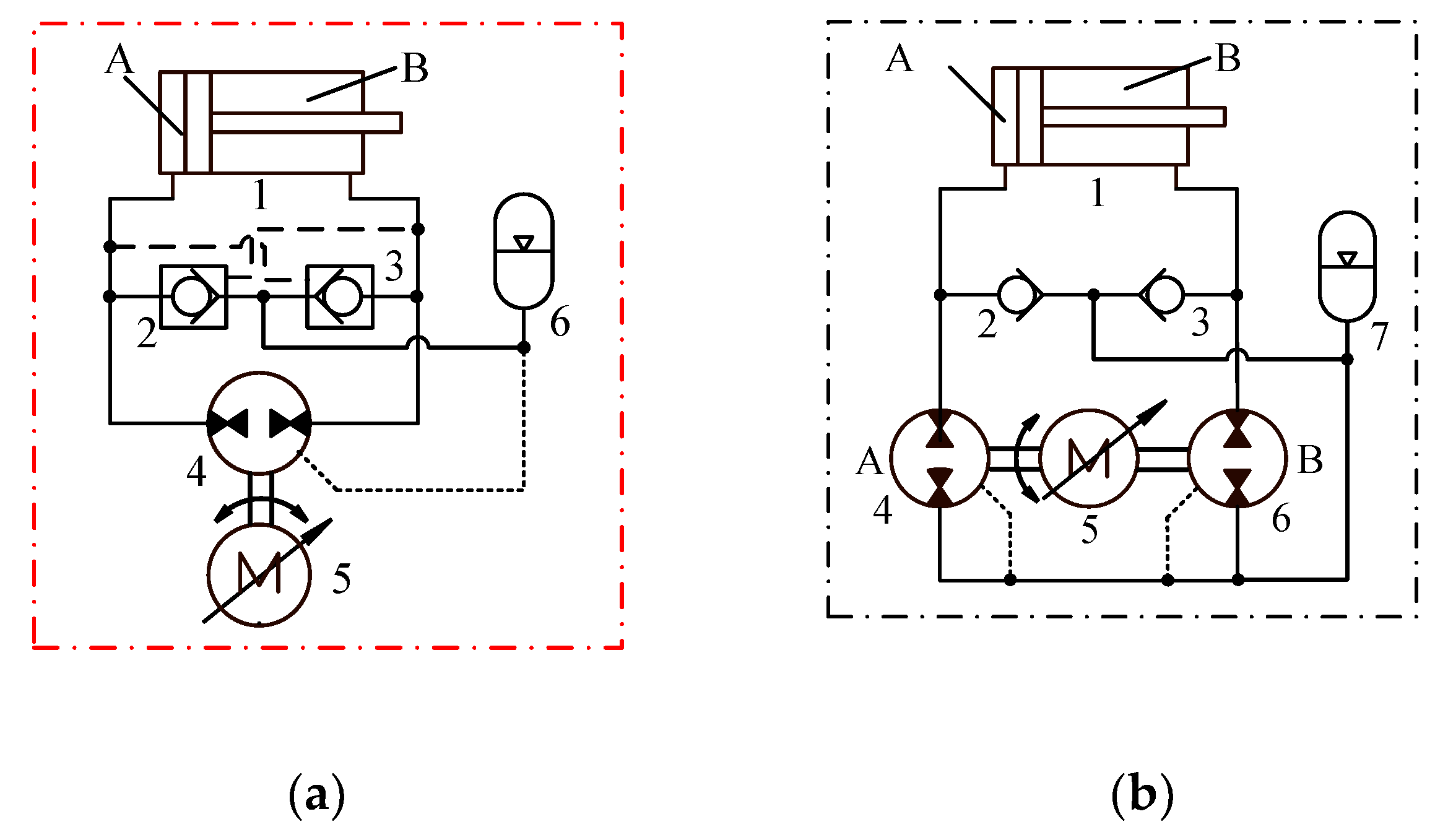
Figure 1a, the single pump-controlled cylinder (SPC) comprises a pump driven by a permanent magnet servo motor (PMSM) (5), a couple of pilot-operated check valves (2 and 3) for compensating the differential flow of the single rod cylinder and a low-pressure hydraulic accumulator (6) instead of a reservoir.
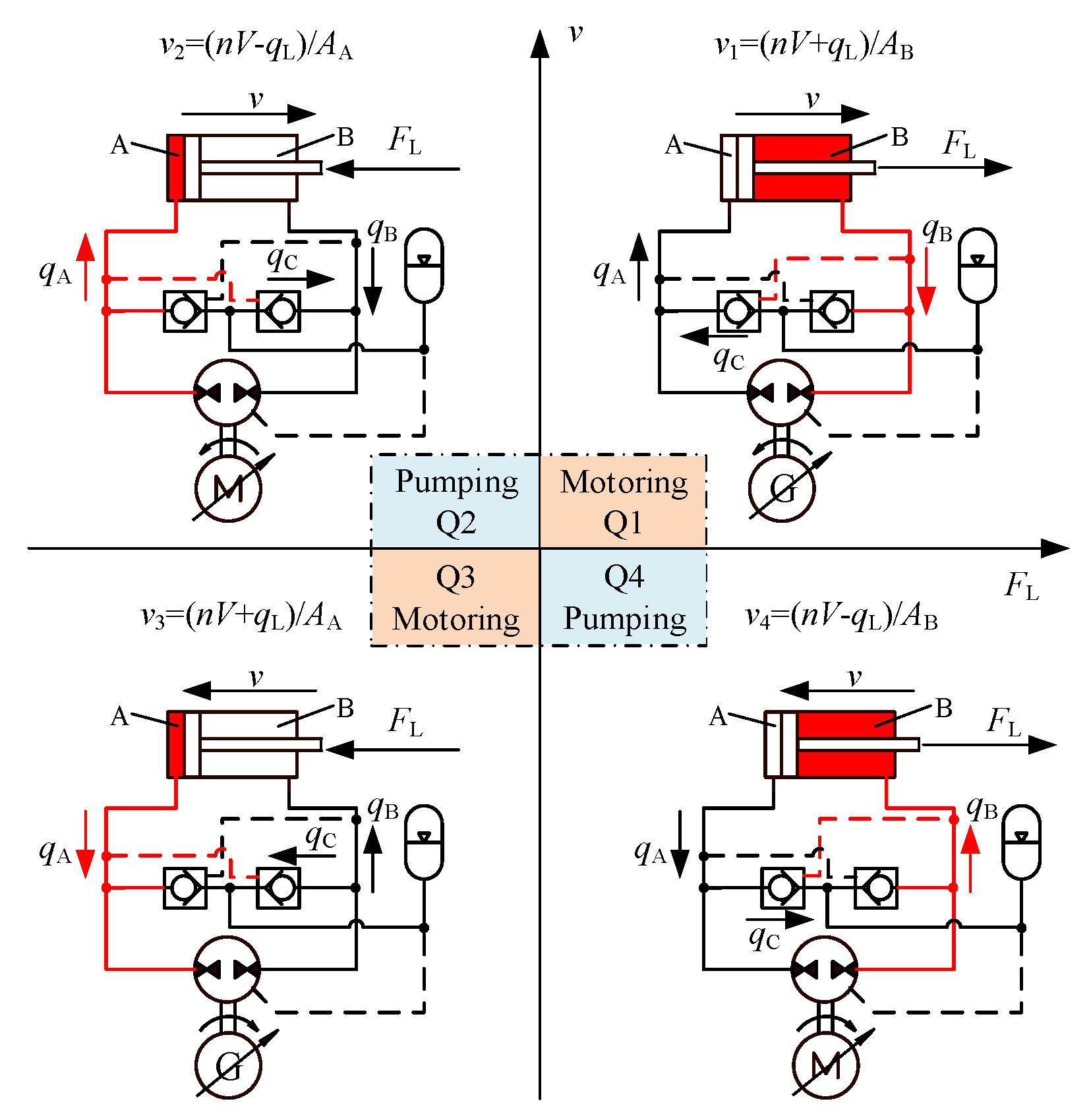
The operating condition of the SPC can be divided into four quadrants, as shown in
Figure 2, based on the directions of the actuator’s load force and velocity. This can be classified into two groups: one group outputting power to the load and another feeding back power from the load. In quadrant 1 (Q1) and quadrant 3 (Q3), the pump runs in motoring mode and the electric motor runs in generating mode. In quadrant 2 (Q2) and quadrant 2 (Q4), the pump operates in pumping mode and the electric motor runs in motoring mode. The differential flows of the asymmetric cylinder are compensated by the flow through the pilot-operated check valve connecting to the low-pressure chamber of the cylinder. Assuming the leakage of the pump/motor
qL is constant, the velocity of each quadrant can be illustrated as follows:
where
vi (
i = 1, 2, 3, 4) denotes the cylinder velocity under the corresponding operating quadrant.
V and
ηV,P/
ηV,M are the displacement and volumetric efficiency of the pump/motor.
AA and
AB are the effective cross-sectional area of piston and rod side of the cylinder.
In Q1 (motoring mode), the pump acts as a motor and the extending velocity depends on the flowrate discharging from chamber B. Therefore, the extending velocity of the cylinder is regulated by the flowrate qB, decided by the theoretical flowrate of the hydraulic motor plus the leakage.
The variables
rV12 and
rV43 denote the ratios of the velocity fluctuation when switching from Q1 to Q2 (pumping mode) in the extending phase and from Q4 (pumping mode) to Q3 (motoring mode) in the retracting phase, respectively:
where it is assumed that the pump and motor volumetric efficiencies (
ηV,M and
ηV,P) are identical.
Since the velocity fluctuation during operating condition switching would degrade the velocity tracking performance significantly, the DPC is proposed, as shown in
Figure 1b. The system compensates the differential flow of the asymmetric cylinder by an additional pump B. In addition, two check valves are installed for anti-cavitation purposes.
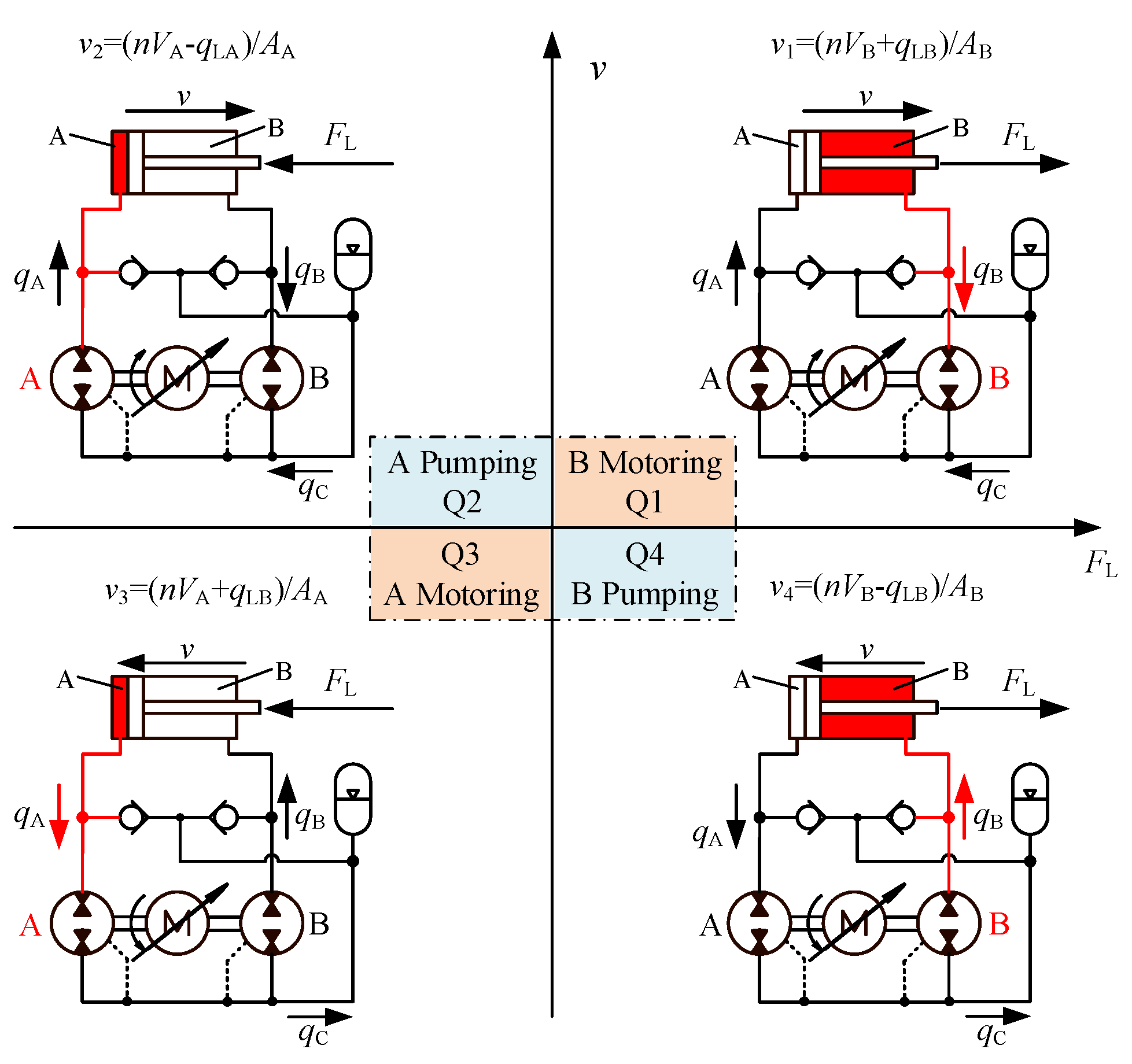
The operating condition of the double pump-controlled system can be divided into four quadrants as well, as shown in
Figure 3, including Q1 and Q3 (motoring mode) and Q2 and Q4 (pumping mode). The cylinder velocities in each quadrant are expressed based on the control chamber:
Therefore, the velocity fluctuation ratio
rV21 and
rV43 are illustrated as follows, respectively.
where the
rpu is the ratio of displacements of pump/motor A and B.
The displacement ratio
rpu of pump/motors and the area ratio of cylinder chambers should be as close as possible, but due to the pump/motors available on the market, the sizing deviation
rdev is usually unavoidable. The
rdev can be expressed by Equation (16); therefore,
rV21 and
rV43 can be rewritten as follows, varying with
ηV and
rdev:
Assuming that the pump volumetric efficiencies (
ηV) range from 0.8 to 1, the ratio
rcyl (of working area
AB to
AA of the cylinder) is in the 0.5~1 range. In addition, the sizing deviation of the DPC is assumed to be 0.05, and thus
rpu/
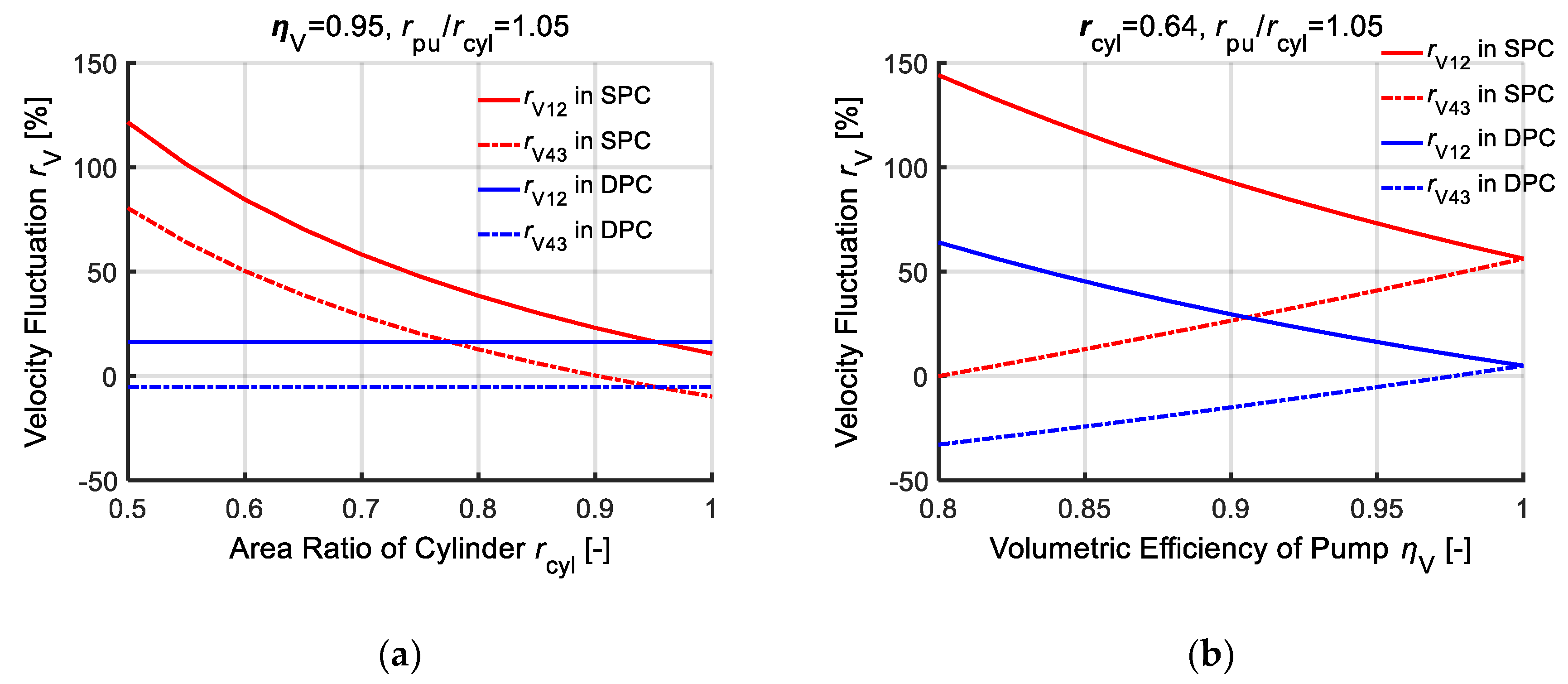
rcyl = 1.05. Based on these assumptions, the velocity fluctuation percentages of the SPC and the DPC from Q1 to Q2 and from Q4 to Q3 are shown in
Figure 4a,b.
It can be seen from
Figure 4 that, in the SPC, the velocity would fluctuate heavily when the direction of the force changes during extending or retracting, namely, the operating conditions switch between Q1 and Q2 or Q3 and Q4. Besides, the fluctuation ratios
rV21 and
rV43 increase as
ηV and
rcyl decrease.
The results in
Figure 4a reveal that, compared to the SPC, the velocity fluctuation in the DPC drops dramatically, especially when
rcyl is close to 0.5. The results in
Figure 4b show that the velocity fluctuation in the DPC approaches 5% when
ηV is close to 1, but 56.25% for the SPC.
In the SPC, assuming ηV = 0.95 and rcyl = 0.64 (the area ratio of the arm cylinder of the micro-excavator), rV12 and rV43 are 73.1% and 41.0%, respectively. On the other hand, in the DPC, assuming ηV = 0.95 and rdev = 0.05, rV12 and rV43 are 16.3% and –5.2%, respectively.
Therefore, the DPC has the potential to eliminate the velocity fluctuation of the pump-controlled asymmetric cylinder under four-quadrant operation.
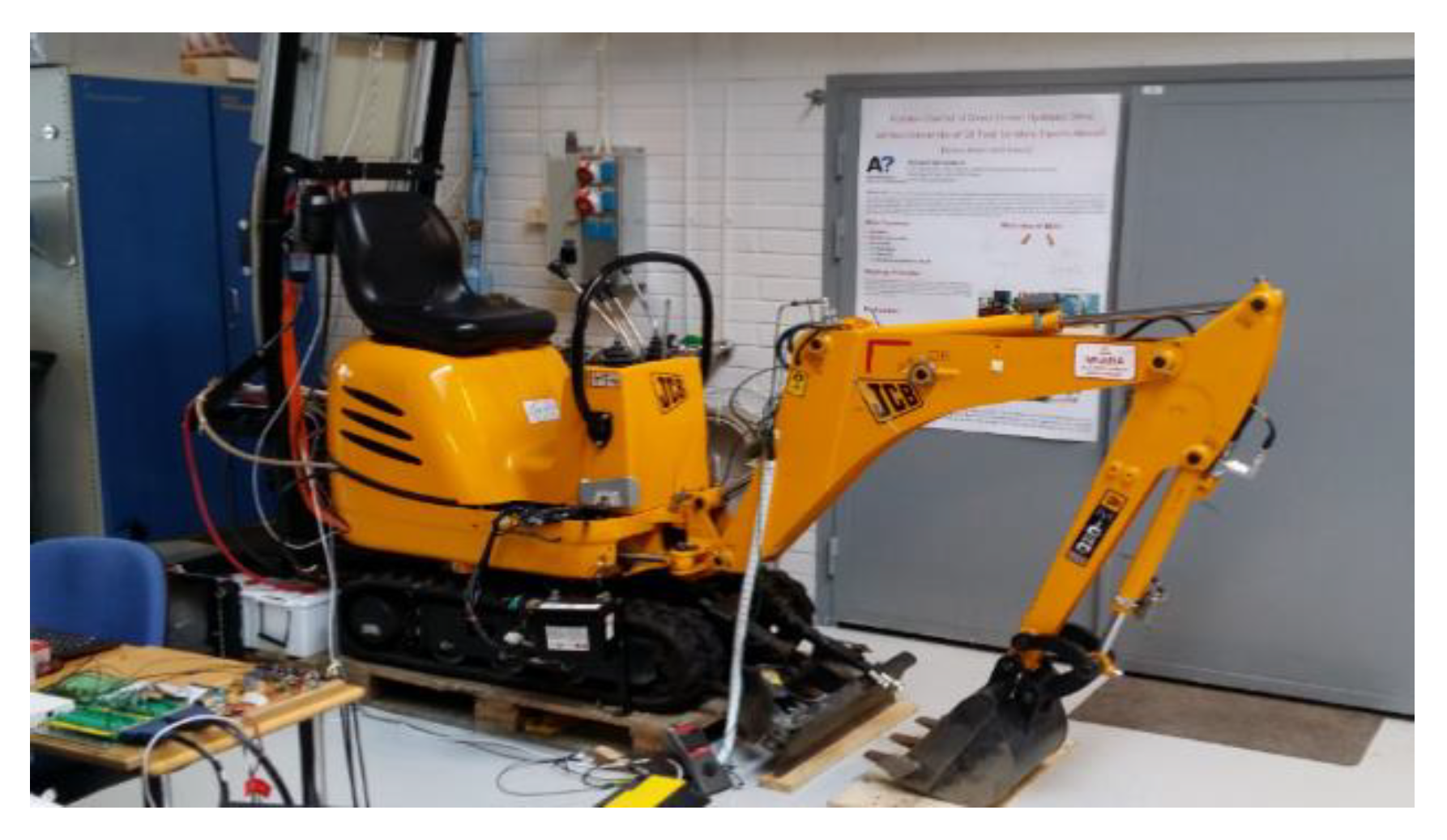
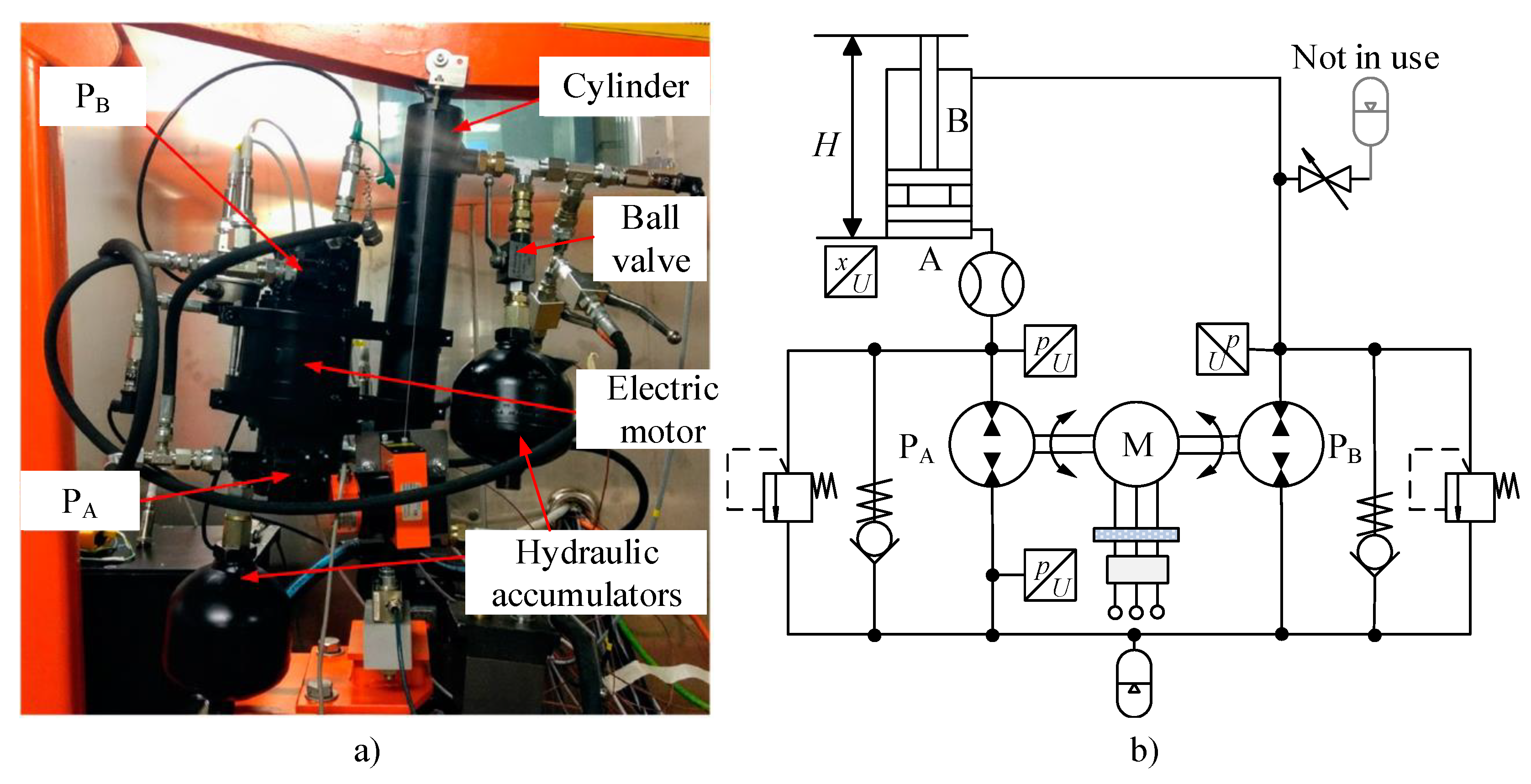
2.2. The Four-Quadrant Operation of the Excavator Arm Cylinder by Measurement
In order to illustrate the four-quadrant operating condition, the necessary measurements of the arm cylinder of the micro-excavator were performed in the laboratory, as shown in
Figure 5 [
29].
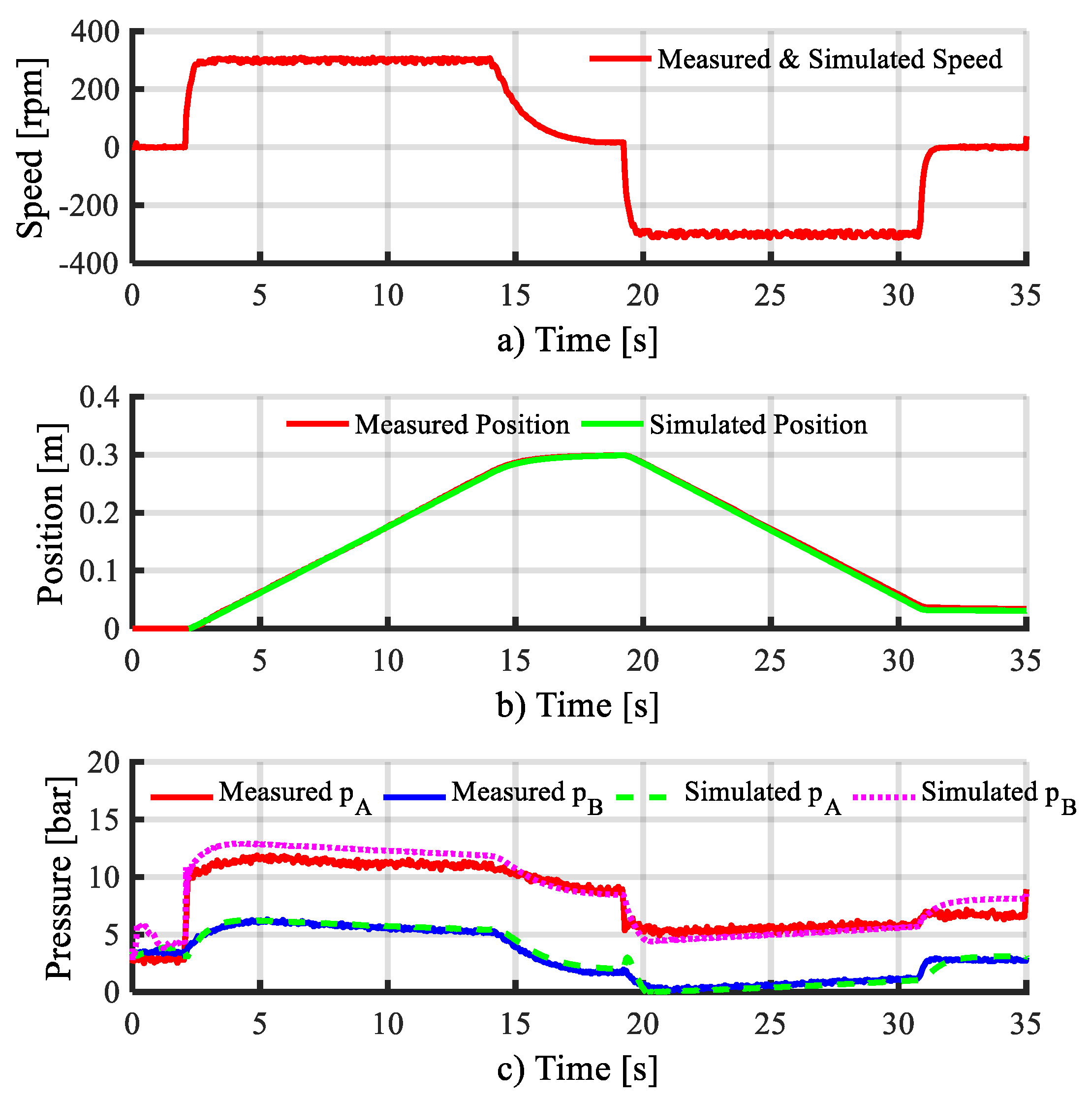
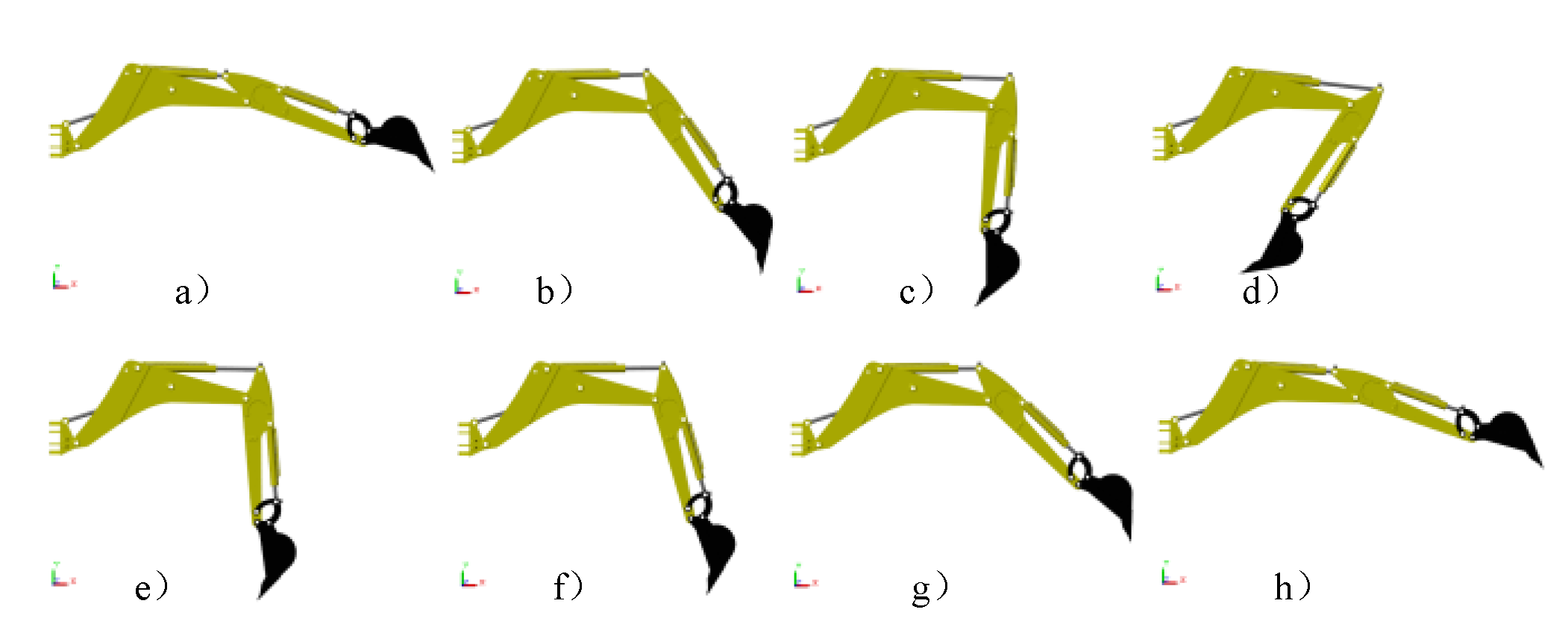
The arm cylinder was controlled to move from a fully retracted position to a fully extracted position and back.
Figure 6 presents the calculated load force, measured position and velocity of the arm cylinder. The load force
FL of the cylinder was calculated using the measured pressures and the working area of cylinder
AA and
AB. The velocity was a derivative of the position. It can be seen from
Figure 6 that the arm cylinder firstly ran in Q1 (in the stage of
a to
b with positive load force and velocity) and then switched to Q2 (in the stage of b to c with negative load force and positive velocity) at approximately 7 s when extending. In the phase of
c to
d, the arm cylinder was fully extended and held. In stage
d to
e, the arm cylinder retracted and switched from Q4 to Q3 at the d point, and then in Q3 with negative load force and velocity.
Table 1 compares the components of the SPC and the DPC, including the arm cylinder of the micro-excavator, hydraulic components (four-quadrant external gear motors, check valves, diaphragm accumulator) from Bosh Rexroth and one servo drive. In this study, the dynamics of the servo drive is considered as a second-order system and its energy efficiency is set to be a constant (95%). It can be seen from
Table 1 the DPC requires one additional pump 7.1 cm
3/rev and the SPC needs two pilot-operated check valves.
To investigate the control performance and energy behavior of the SPC and the DPC under four-quadrant operation, the following section presents details of modeling of the two systems with the front attachment of the excavator.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}