Condition Monitoring of Active Magnetic Bearings on the Internet of Things †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
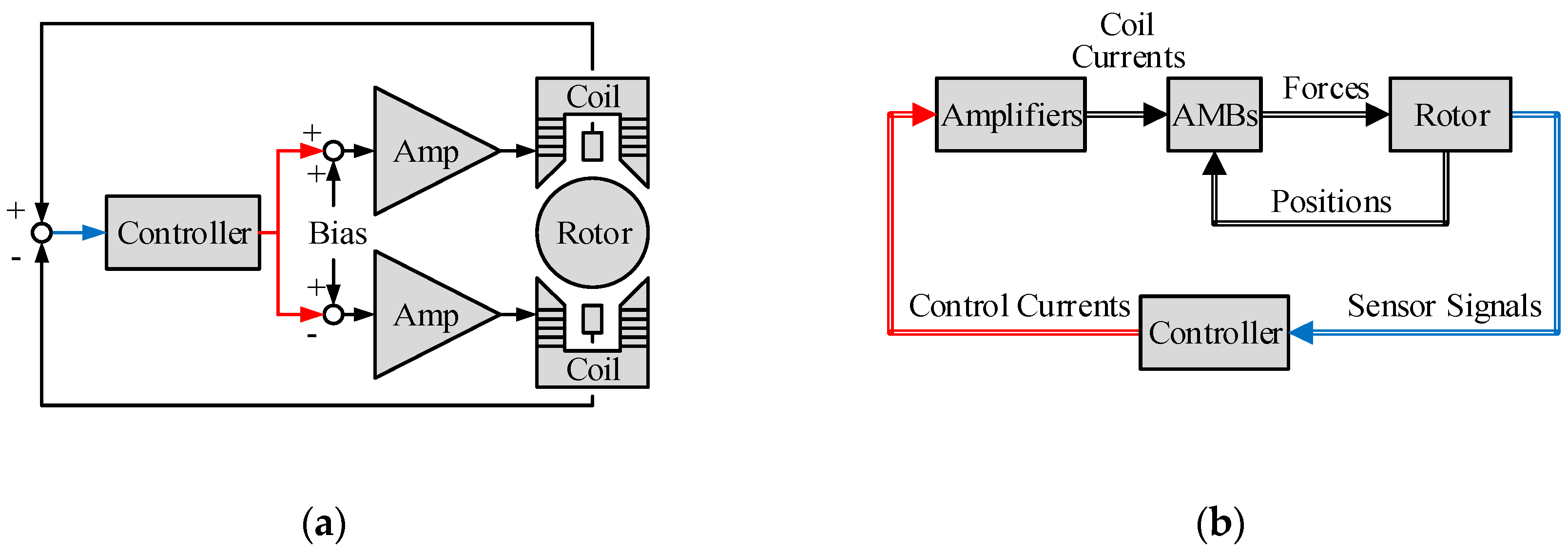
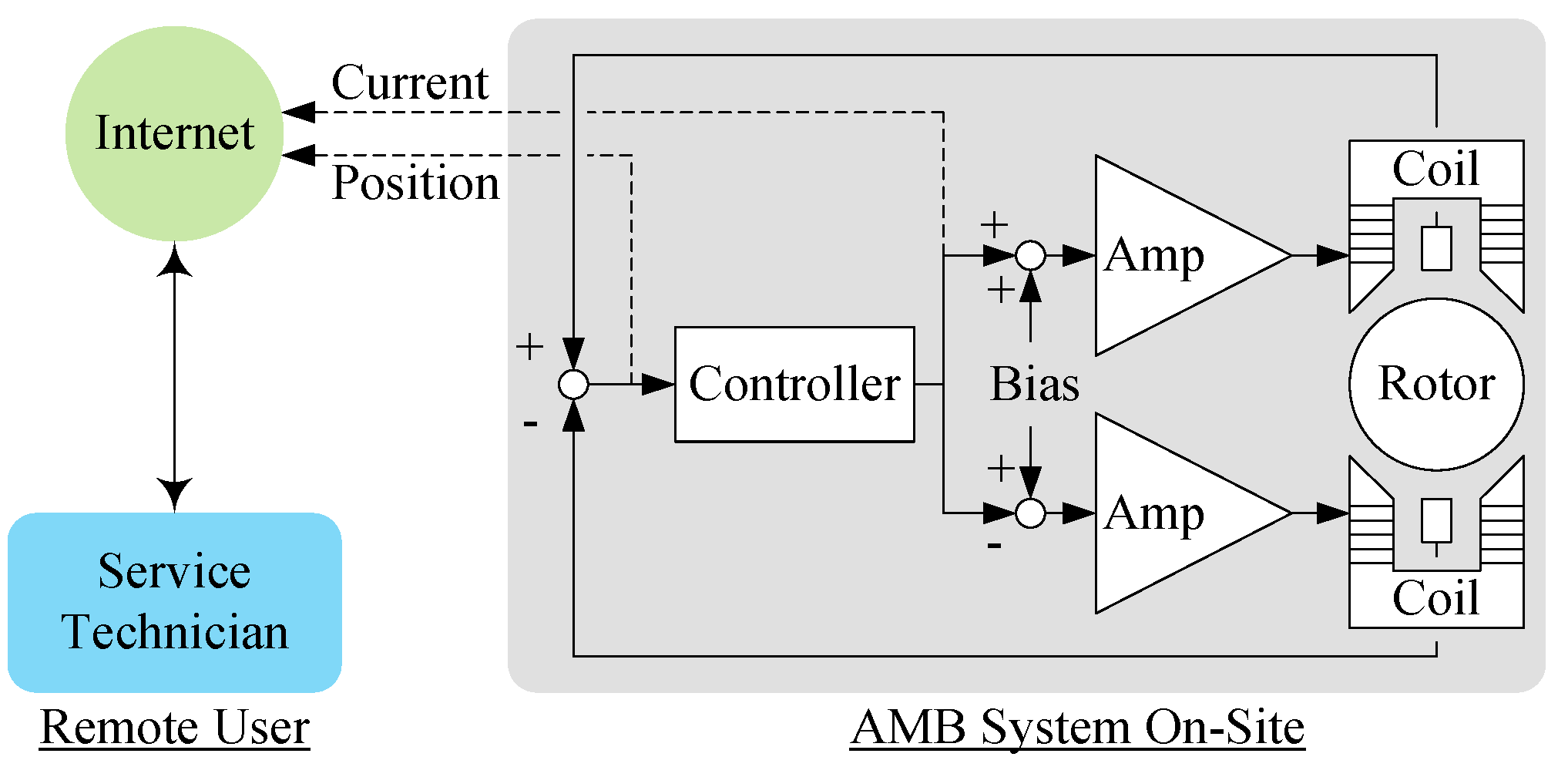
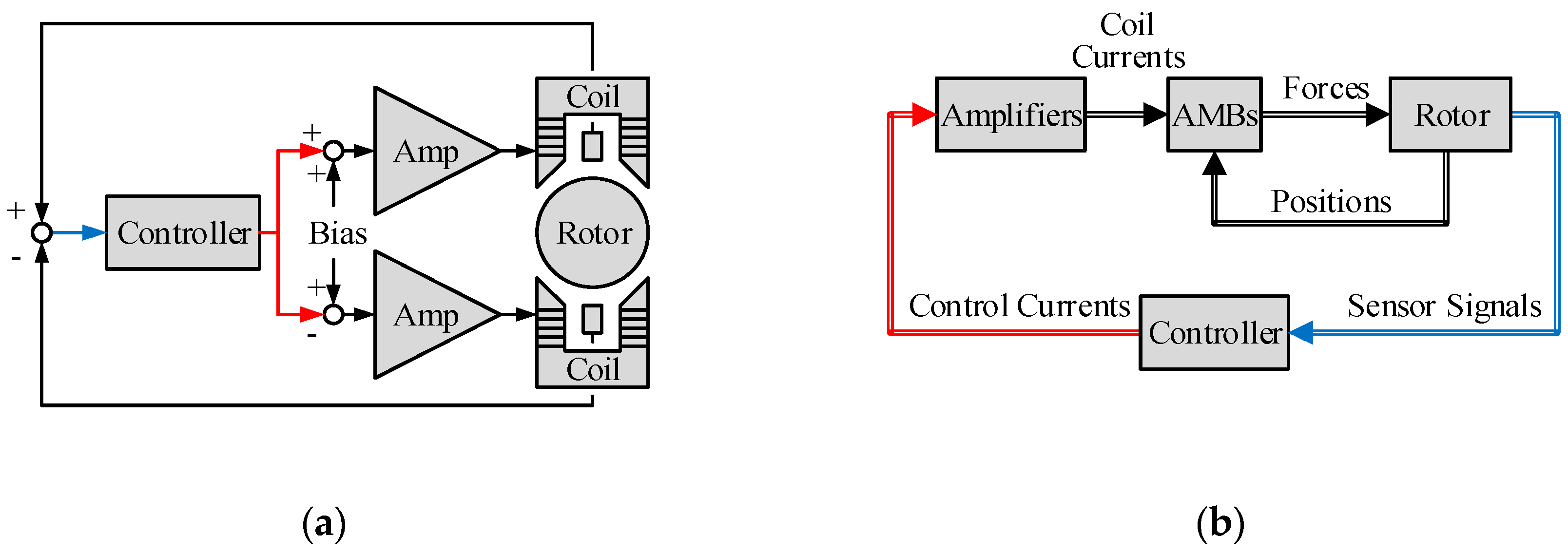
2.1. AMB and Condition Monitoring on the IoT
2.2. Experimental System
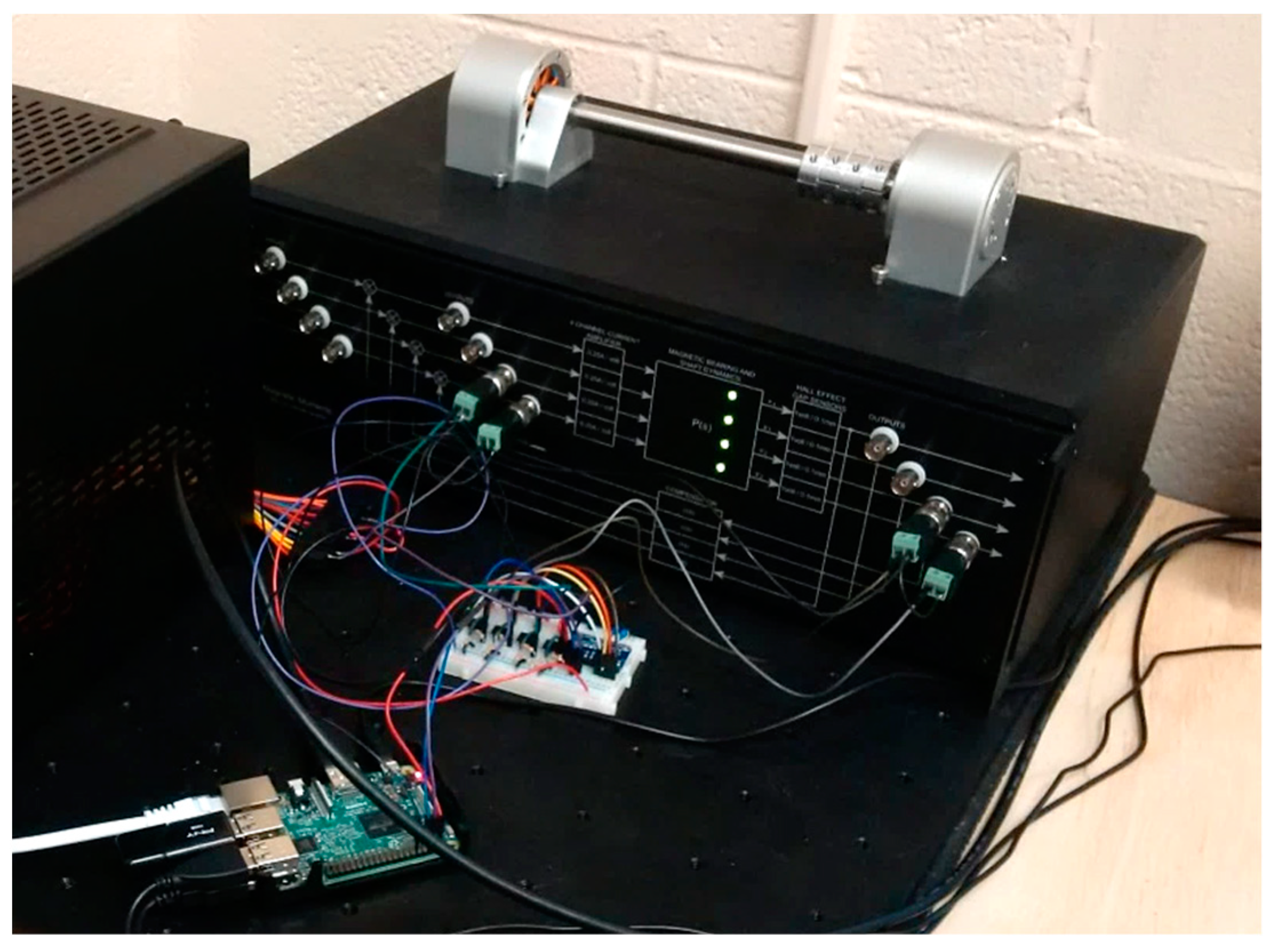
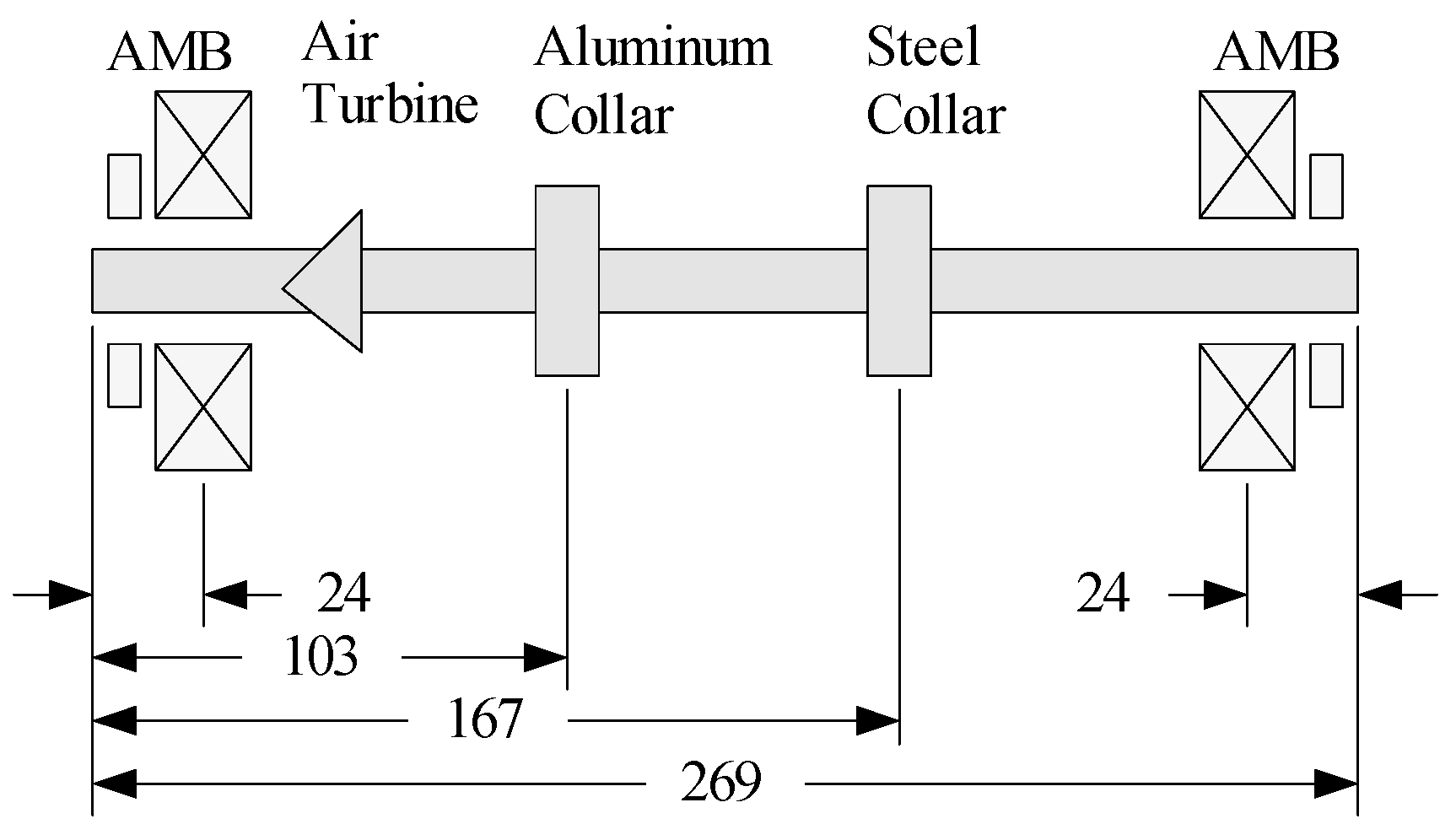
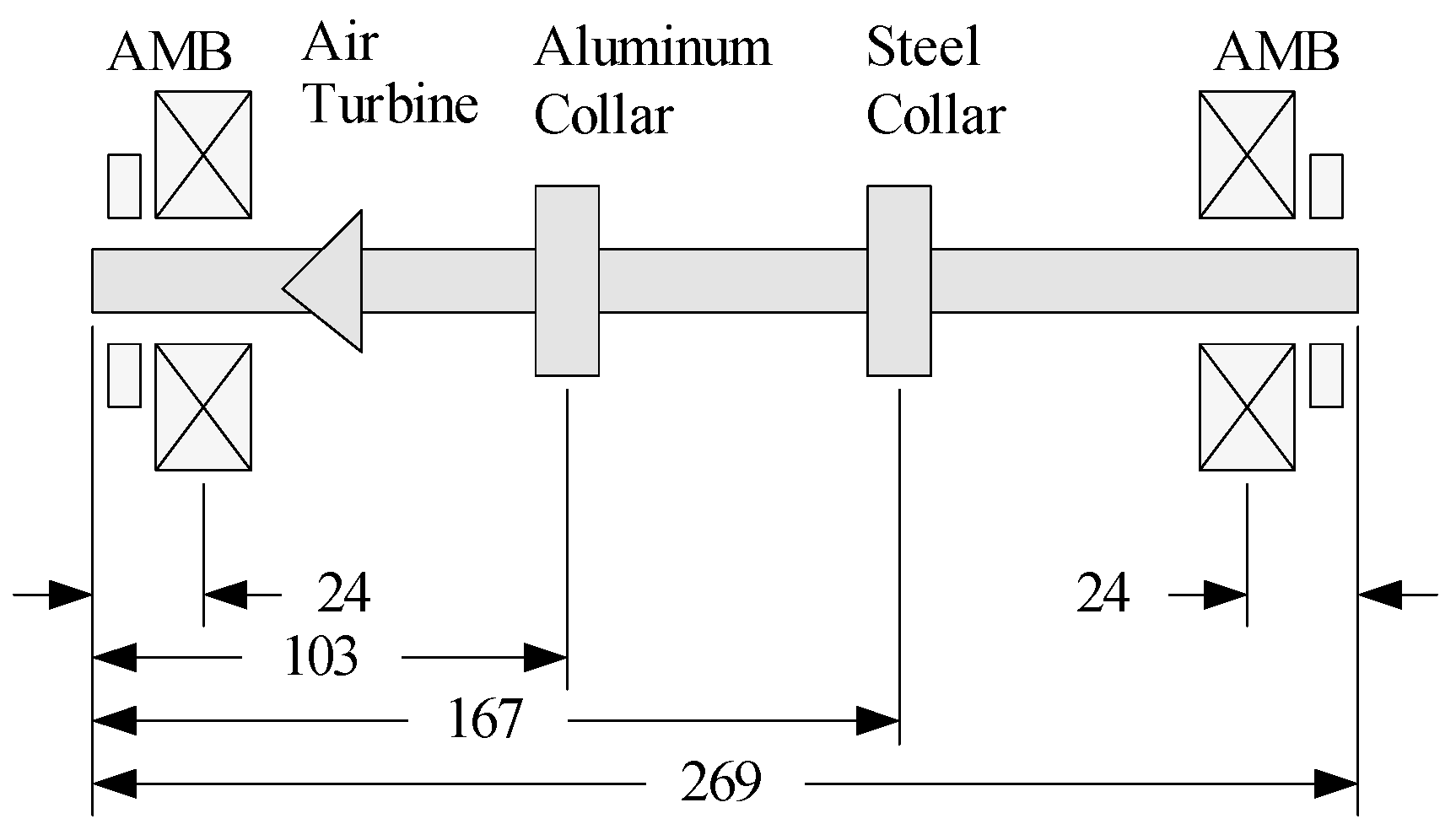
2.3.1. AMB Test Rig
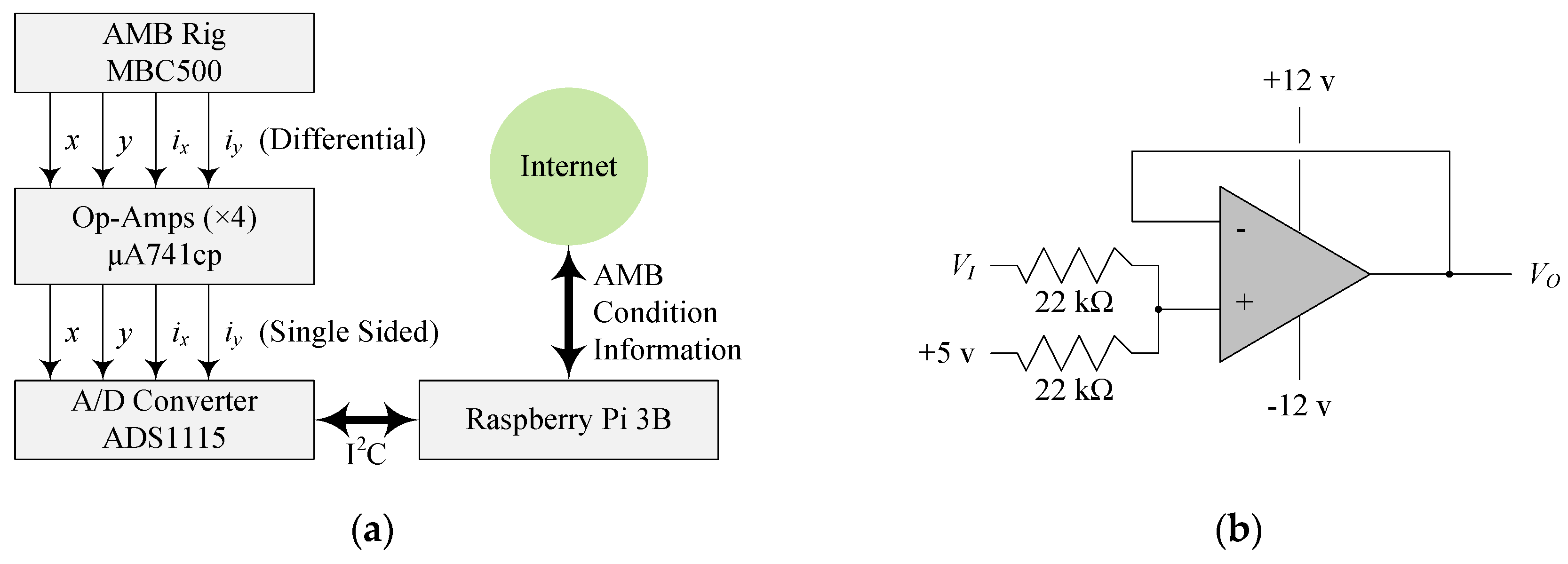
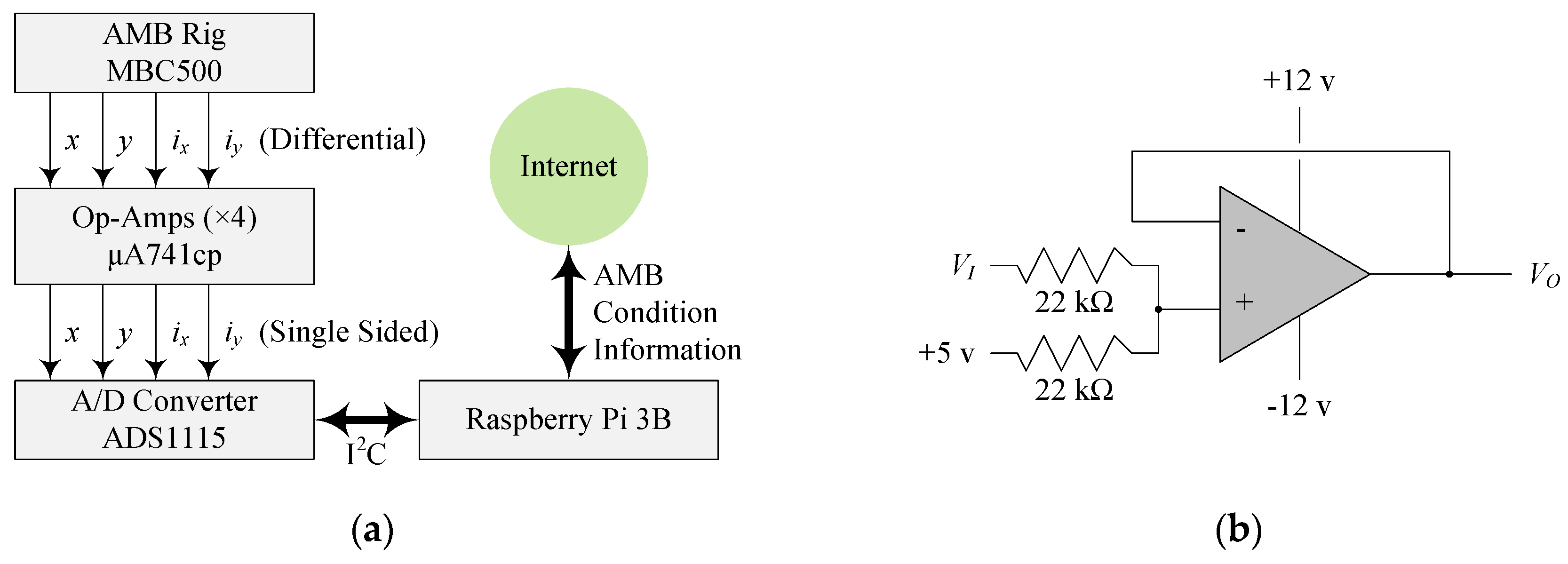
2.3.2. Hardware Added for IoT
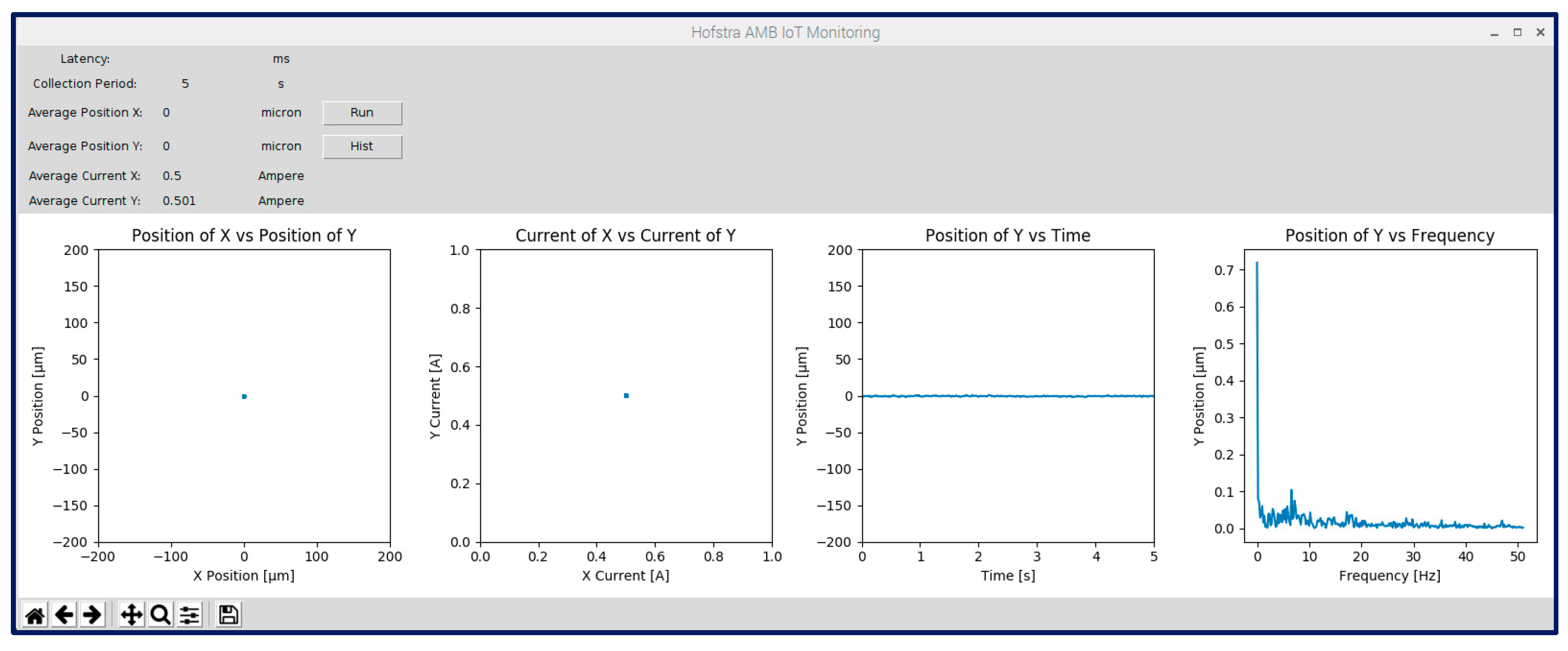
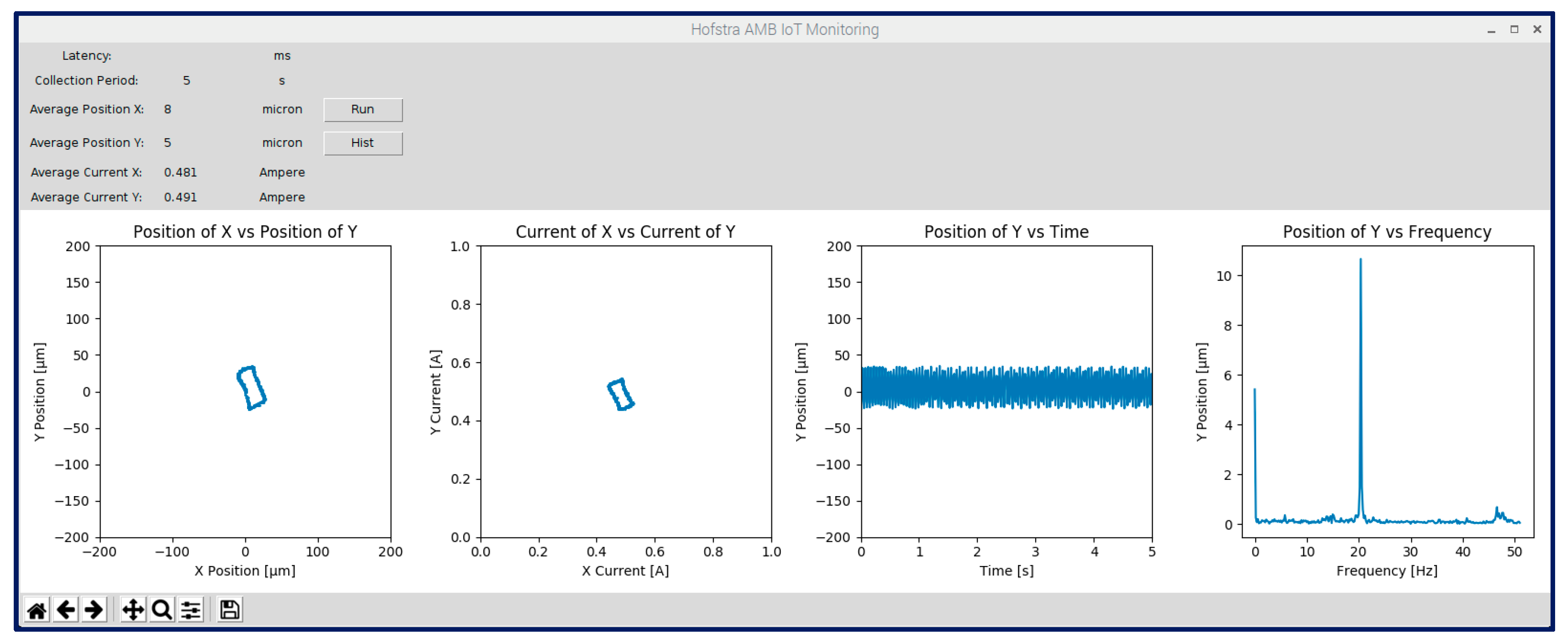
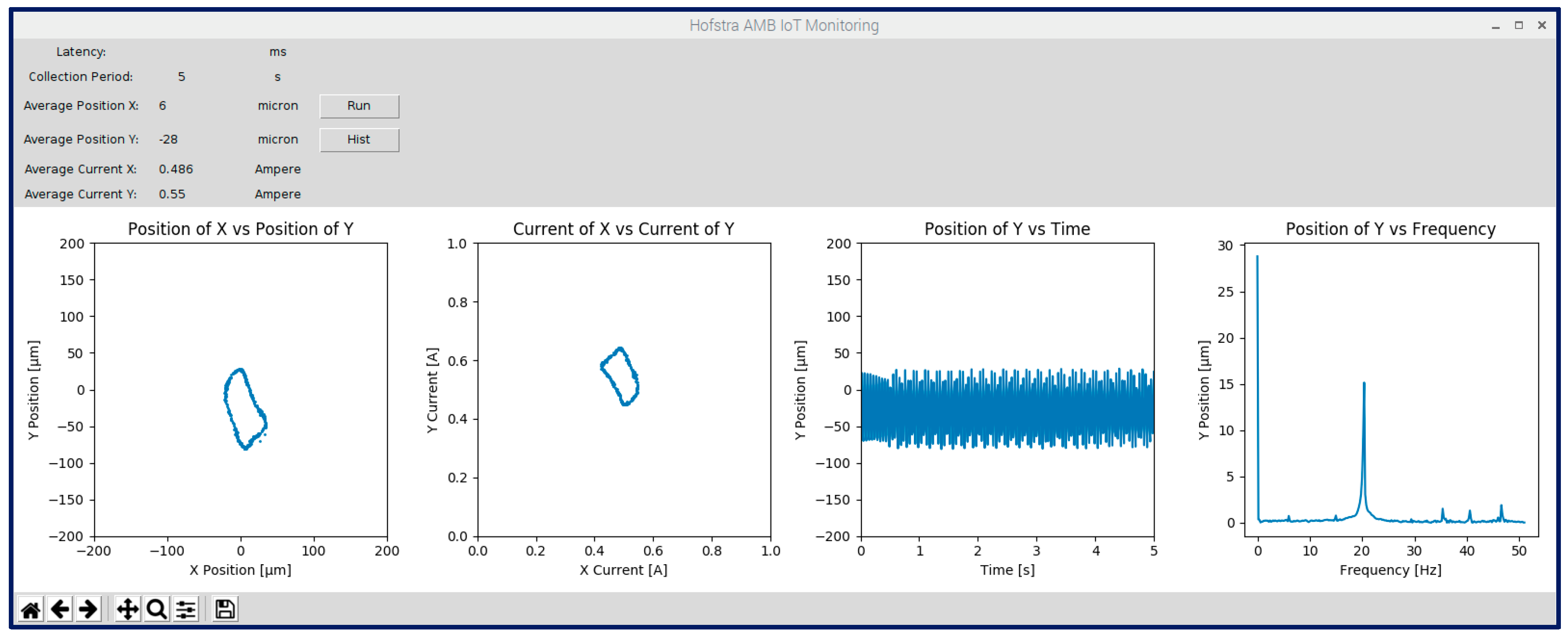
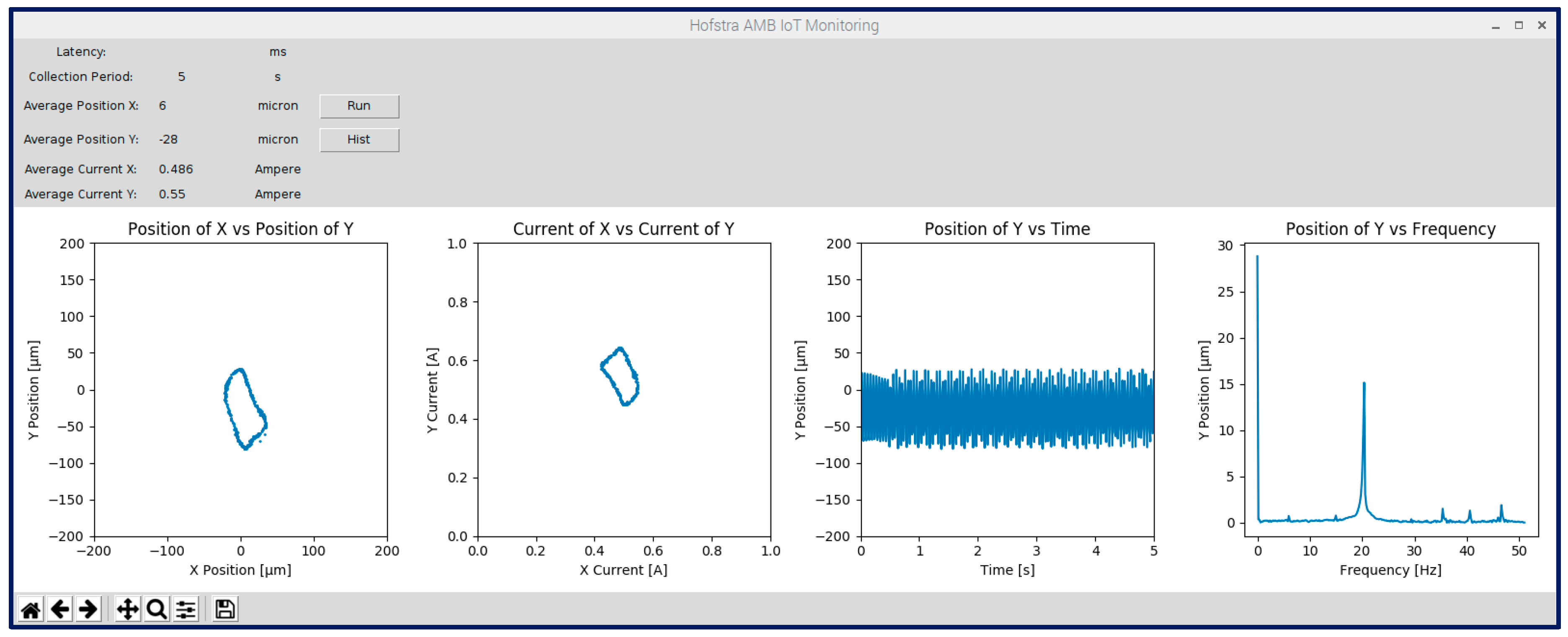
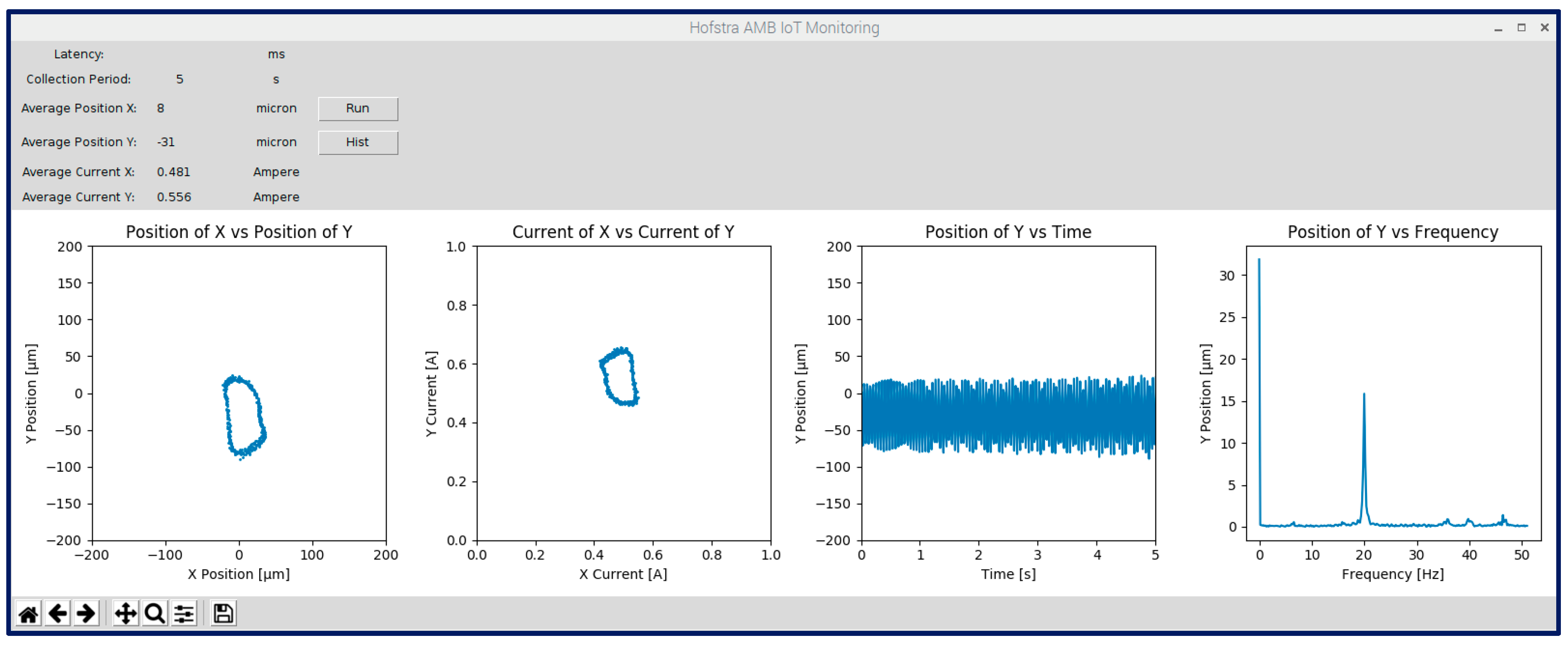
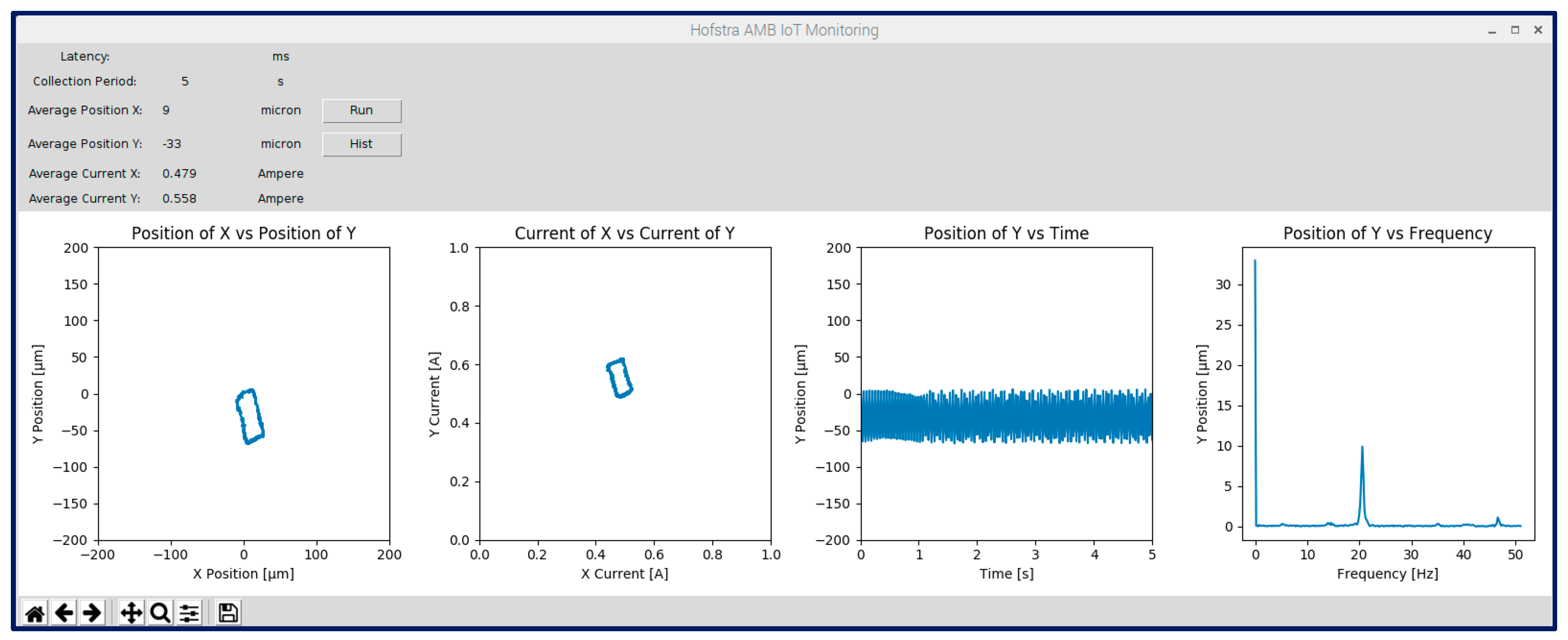
2.3.3. IoT Condition Monitoring Software
3. Results
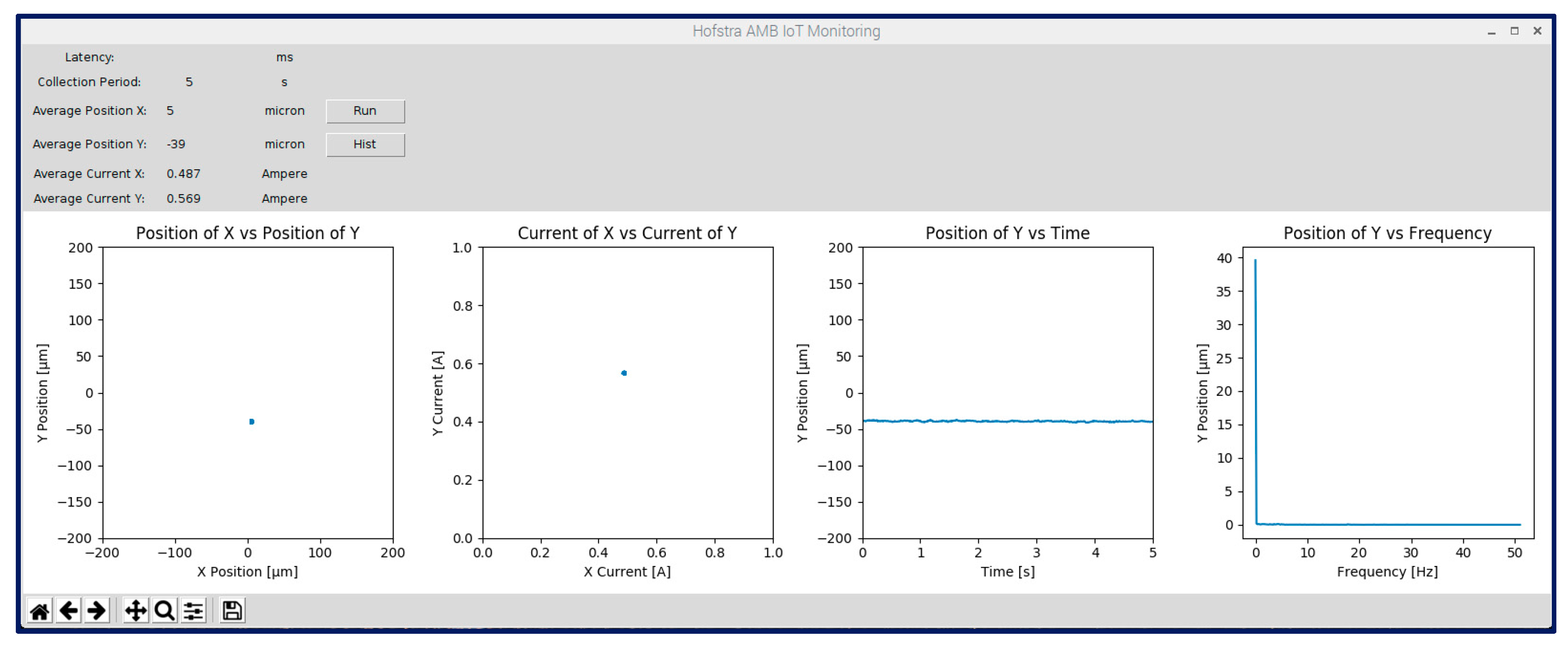
3.1. Nonrotating Tests
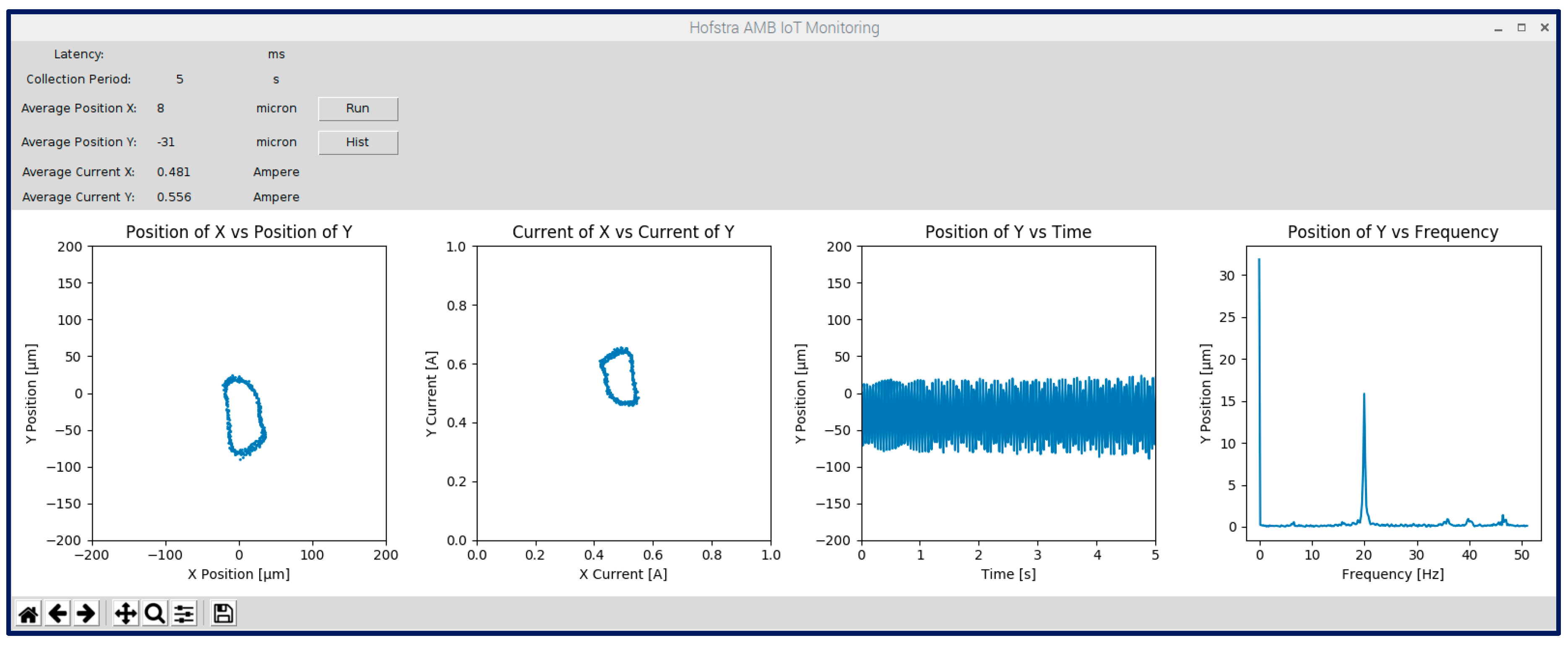
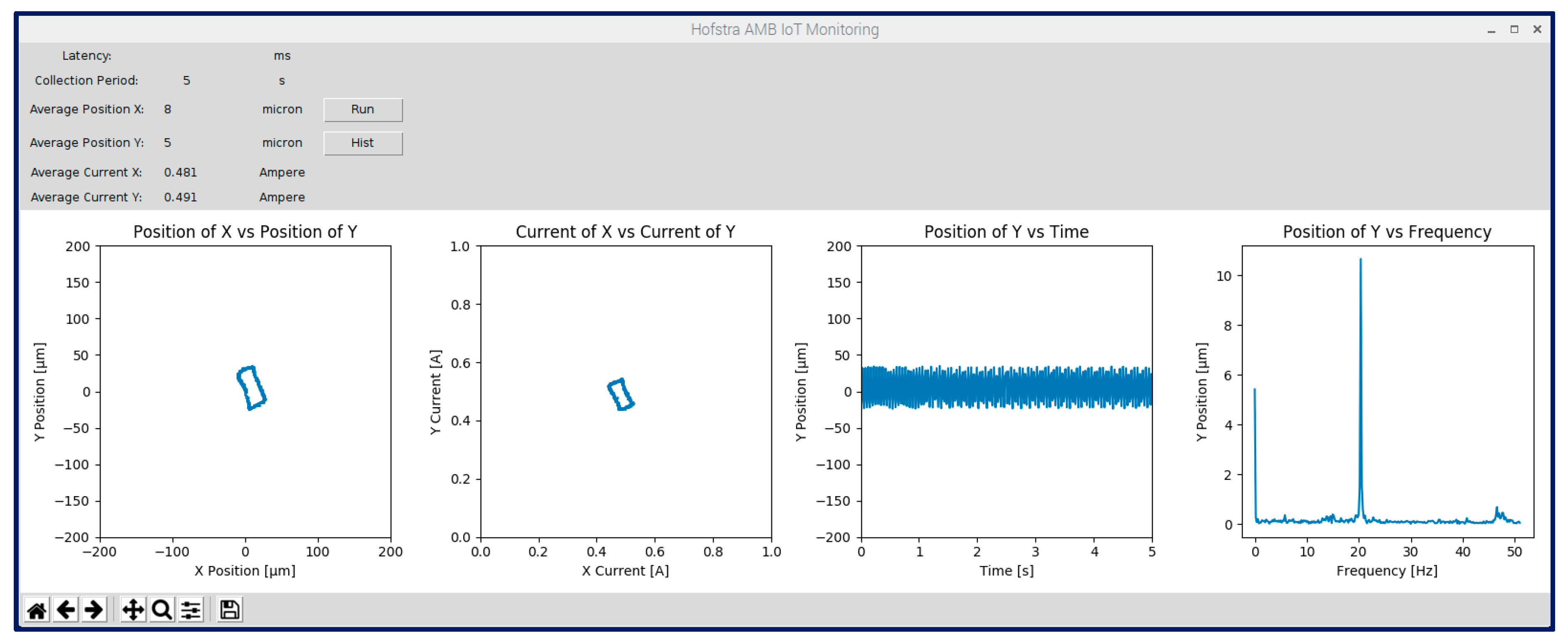
3.2. Balanced Rotating Tests
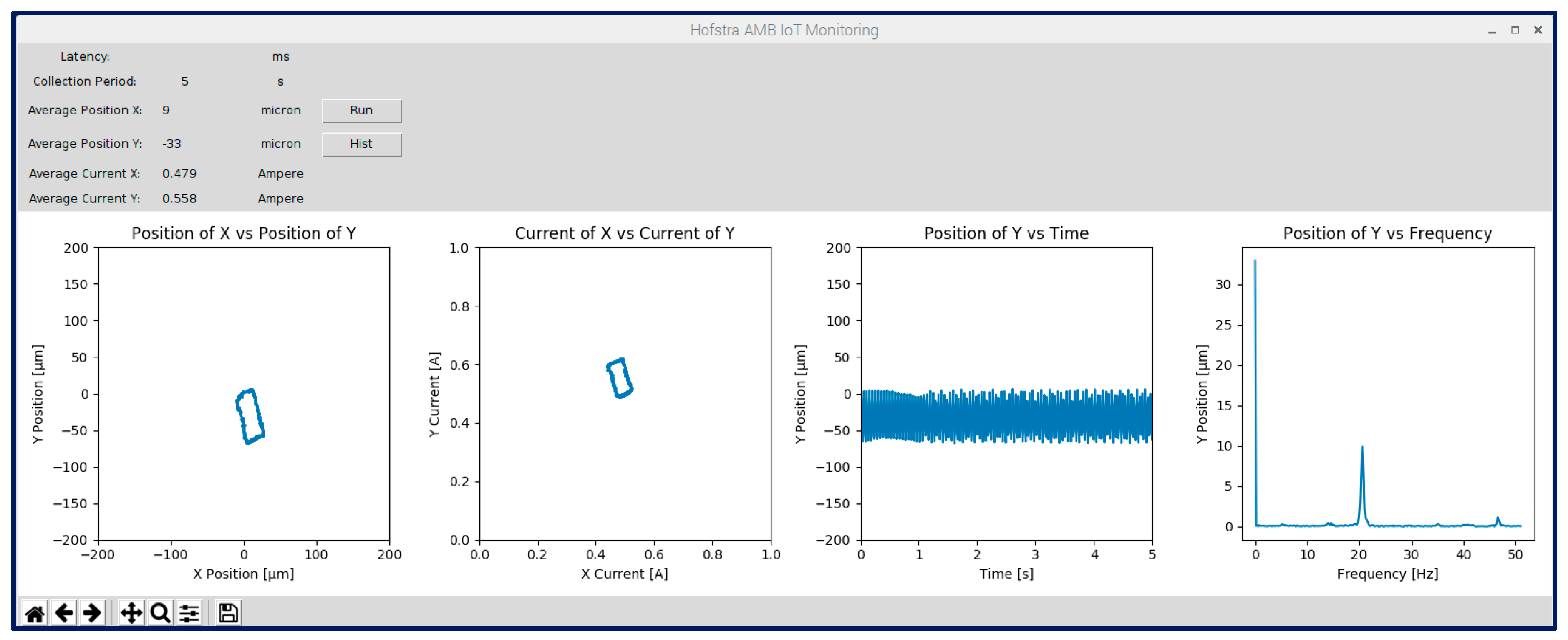
3.3. Unbalanced Rotating Tests
4. Discussion
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Bleuler, H.; Cole, M.; Keogh, P.; Larsonneur, R.; Maslen, E.; Okada, Y.; Schweitzer, G.; Traxler, A. Magnetic Bearings: Theory, Design, and Application to Rotating Machinery; Schweitzer, G., Maslen, E.H., Eds.; Springer: Berlin, Germany, 2009. [Google Scholar]
- Pesch, A.H.; Sawicki, J.T. Active Magnetic Bearing Online Levitation Recovery through µ-Synthesis Robust Control. Actuators 2017, 6, 2. [Google Scholar] [CrossRef]
- Osa, M.; Masuzawa, T.; Orihara, R.; Tatsumi, E. Compact Maglev Motor with Full DOF Active Control for Miniaturized Rotary Blood Pumps. In Proceedings of the 11th International Symposium on Linear Drives for Industry Applications, Osaka, Japan, 6–8 September 2017. [Google Scholar]
- Aeschlimann, M.; Hubatka, M.; Stettler, R.; Housseini, R. Commissioning of Off-Shore Gas Compressor with 9-Axes Magnetic Bearing System: Commissioning Tools. In Proceedings of the ASME Turbo Expo 2017: Turbomachinery Technical Conference and Exposition, Charlotte, NC, USA, 26–30 June 2017. [Google Scholar]
- Han, B.; Zheng, S.; Li, H.; Liu, Q. Weight-Reduction Design Based on Integrated Radial-Axial Magnetic Bearing of a Large-Scale MSCMG for Space Station Application. IEEE Trans. Ind. Electron. 2017, 64, 2205–2214. [Google Scholar] [CrossRef]
- Smirnov, A.; Pesch, A.H.; Pyrhönen, O.; Sawicki, J.T. High-precision Cutting Tool Tracking with a Magnetic Bearing Spindle. J. Dyn. Syst. Meas. Contr. 2015, 137, 051017. [Google Scholar] [CrossRef]
- Zheng, S.; Chen, Q.; Ren, H. Active Balancing Control of AMB-Rotor System using a Phase-Shift Notch Filter Connected in Parallel Mode. IEEE Trans. Ind. Electron. 2016, 63, 3777–3785. [Google Scholar] [CrossRef]
- Lijesh, K.P.; Muzakkir, S.M.; Hirani, H. Failure Mode and Effect Analysis of Passive Magnetic Bearing. Eng. Fail. Anal. 2016, 62, 1–20. [Google Scholar] [CrossRef]
- Filatov, A.; Hawkins, L.; McMullen, P. Homopolar Permanent-Magnet-Biased Actuators and Their Application in Rotational Active Magnetic Bearing Systems. Actuators 2016, 6, 26. [Google Scholar] [CrossRef]
- Tsiotras, P.; Wilson, B.C. Zero- and Low-Bias Control Designs for Active Magnetic Bearings. IEEE Trans Contr. Syst. Technol. 2003, 11, 889–904. [Google Scholar] [CrossRef]
- Tsiotras, P.; Arcak, M. Low-Bias Control of AMB Subject to Voltage Saturation: State-Feedback and Observer Designs. In Proceedings of the 41st IEEE Transactions on Control Systems Technology, Las Vegas, NV, USA, 11–13 December 2002. [Google Scholar]
- Mystkowski, A.; Pawluszewicz, E.; Dragašius, E. Robust Nonlinear Position-flux Zero-bias Control for Uncertain AMB System. Int. J. Contr. 2015, 88, 1619–1629. [Google Scholar] [CrossRef]
- Mystkowski, A.; Pawluszewicz, E. Nonlinear Position-flux Zero-bias Control for AMB System with Disturbance. Appl. Comput. Electromagnet. Soc. J. 2017, 32, 650–656. [Google Scholar]
- Tsiotras, P.; Wilson, B.; Bartlett, R. Control of a Zero-bias Magnetic Bearing using Control Lyapunov Functions. In Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, Australia, 12–15 December 2000. [Google Scholar]
- Jastrzebski, R.P.; Smirnov, A.; Mystkowski, A.; Pyrhönen, O. Cascaded Position-Flux Controller for AMB System Operating at Zero Bias. Energies 2014, 7, 3561–3575. [Google Scholar] [CrossRef]
- Mystkowski, A. Lyapunov Sliding-Mode Observers with Application for Active Magnetic Bearing Operated with Zero-bias Flux. J. Dyn. Syst. Meas. Contr. 2018, 141. [Google Scholar] [CrossRef]
- Pesch, A.H. Damage Detection of Rotors using Magnetic Force Actuator: Analysis and Experimental Verification. Master’s Thesis, Cleveland State University, Cleveland, OH, USA, 2008. [Google Scholar]
- Auchet, S.; Chevrier, P.; Lacour, M.; Lipinski, P. A New Method of Cutting Force Measurement based on Command Voltages of Active Electro-magnetic Bearings. Int. J. Mach. Tools Manuf. 2004, 44, 1441–1449. [Google Scholar] [CrossRef]
- Smirnov, A. AMB System for High-Speed Motors Using Automatic Commissioning. Ph.D. Thesis, Lappeenranta University of Technology, Lappeenranta, Finland, 2012. [Google Scholar]
- Wortmann, F.; Flüchter, K. Internet of Things–Technology and Value Added. Bus. Inf. Syst. Eng. 2015, 57, 221–224. [Google Scholar] [CrossRef]
- Ashton, K. Internet of Things. RFID J. 2009, 22, 97–114. [Google Scholar]
- Atzori, L.; Iera, A.; Morabito, G. The Internet of Things: A Survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Xu, L.D.; He, W.; Li, S. Internet of Things in Industries: A Survey. IEEE Trans. Ind. Inf. 2014, 10, 2233–2243. [Google Scholar] [CrossRef]
- Tokognon, C.A.; Gao, B.; Tian, G.Y.; Yan, Y. Structural Health Monitoring Framework Based on Internet of Things: A Survey. IEEE Internet Things J. 2017, 4, 619–635. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, M.; Zhou, Z.; Shen, W. An IoT-Based Online Monitoring System for Continuous Steel Casting. IEEE Internet Things J. 2016, 3, 1355–1363. [Google Scholar] [CrossRef]
- Ganga, D.; Ramachandran, V. IoT Based Vibration Analytics of Electrical Machines. IEEE Internet Things J. 2018, 5, 4538–4549. [Google Scholar] [CrossRef]
- Hilton, E.F.; Humphrey, M.A.; Stankovic, J.A. Design of an Open Source, Hard Real Time, Controls Implementation Platform for Active Magnetic Bearings. In Proceedings of the 7th International Symposium on Magnetic Bearings, Zurich, Switzerland, 23–25 August 2000. [Google Scholar]
- Turker, E.; Harvey, A. Magnetic Bearing Controller Tuning and Client/Server Technology. In Proceedings of the TENCON 2005–2005 IEEE Region 10 Conference, Melbourne, Australia, 21–24 November 2005. [Google Scholar]
- Jayawant, R.; Davies, N. Integration of Signal Processing Capability in an AMB Controller to Support Remote and Automated Commissioning. In Proceedings of the 1st Brazilian Workshop on Magnetic Bearings, Rio de Janeiro, Brazil, 25–26 October 2013. [Google Scholar]
- Jayawant, R.; Davies, N. Field Experience with Automated Tools in Both Remote and Local Commissioning of Active Magnetic Bearing Systems. In Proceedings of the 14th International Symposium on Magnetic Bearings, Linz, Austria, 11–14 August 2014. [Google Scholar]
- Jayawant, R.; Masala, A. Design and Commissioning of a 3.3 MW Motor-driven Compressor Fully Supported on Active Magnetic Bearings. In Proceedings of the 15th International Symposium on Magnetic Bearings, Kitakyushu, Japan, 3–6 August 2016. [Google Scholar]
- Guo, Z.; Zhou, G.; Shultz, P.R.; Qian, M.; Zhu, L. Design and Qualification Testing of Active Magnetic Bearings for High-temperature Gas-cooled Reactors. In Proceedings of the 15th International Symposium on Magnetic Bearings, Kitakyushu, Japan, 3–6 August 2016. [Google Scholar]
- Pesch, A.H.; Scavelli, P.N. AMB Condition Monitoring on the IoT. In Proceedings of the 16th International Symposium on Magnetic Bearings, Beijing, China, 13–17 August 2018. [Google Scholar]
- Anantachaisilp, P.; Lin, Z. Fractional Order PID Control of Rotor Suspension by Active Magnetic Bearings. Actuators 2017, 6, 4. [Google Scholar] [CrossRef]
- Sawicki, J.T.; Friswell, M.I.; Pesch, A.H.; Wroblewski, A.C. Condition Monitoring of Rotor using Active Magnetic Actuator. In Proceedings of the ASME Turbo Expo. 2008: Power for Land, Sea, and Air, Berlin, Germany, 9–13 June 2008. [Google Scholar]
- Mada Sanjaya, W.S.; Maryanti, S.; Wardoyo, C.; Anggraeni, D.; Aziz, M.A.; Marlina, L.; Roziqin, A.; Kusumorini, A. The Development of Quail Eggs Smart Incubator for Hatching System based on Microcontroller and Internet of Things (IoT). In Proceedings of the International Conference on Information and Communications Technology, Yogyakarta, Indonesia, 6–7 March 2018. [Google Scholar]
- Philip, M.; Mendonca, P.J.; Thampy, A.; Menezes, M.; Tantry, R. IoT based Energy Meter (AMMP). Int. J. Internet Things 2017, 6, 88–90. [Google Scholar]
- Nagamma, N.N.; Narmada, T.; Lakshmaiah, M.V.; Ramesh, V.; Pakardin, G. VNC Server based EVM System. In Proceedings of the International Conference on Energy, Communication, Data Analytics and Soft Computing, Chennai, India, 1–2 August 2017. [Google Scholar]
- How does VNC Technology Work? Available online: https://www.realvnc.com/en/connect/docs/faq/function.html#how-does-vnc-technology-work (accessed on 4 January 2019).



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pesch, A.H.; Scavelli, P.N. Condition Monitoring of Active Magnetic Bearings on the Internet of Things. Actuators 2019, 8, 17. https://doi.org/10.3390/act8010017
Pesch AH, Scavelli PN. Condition Monitoring of Active Magnetic Bearings on the Internet of Things. Actuators. 2019; 8(1):17. https://doi.org/10.3390/act8010017
Chicago/Turabian StylePesch, Alexander H., and Peter N. Scavelli. 2019. "Condition Monitoring of Active Magnetic Bearings on the Internet of Things" Actuators 8, no. 1: 17. https://doi.org/10.3390/act8010017
APA StylePesch, A. H., & Scavelli, P. N. (2019). Condition Monitoring of Active Magnetic Bearings on the Internet of Things. Actuators, 8(1), 17. https://doi.org/10.3390/act8010017