
Precise Control of Following Motion Under Perturbed Gap Flow Field



Abstract
1. Introduction
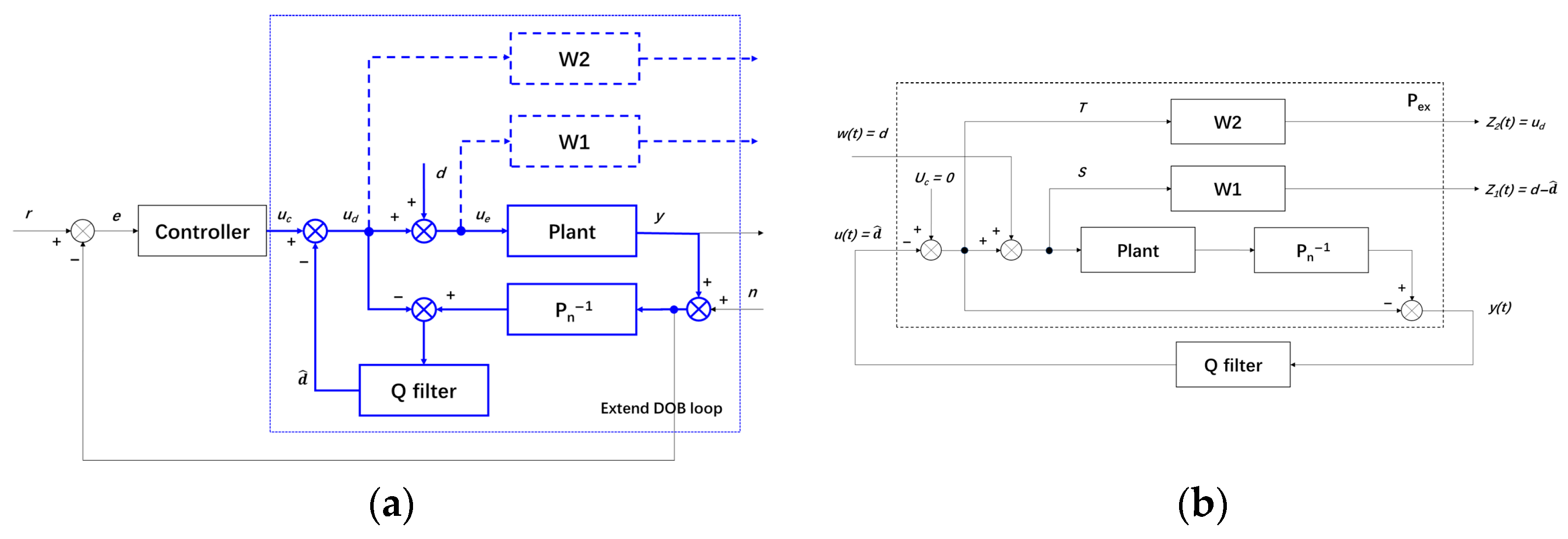
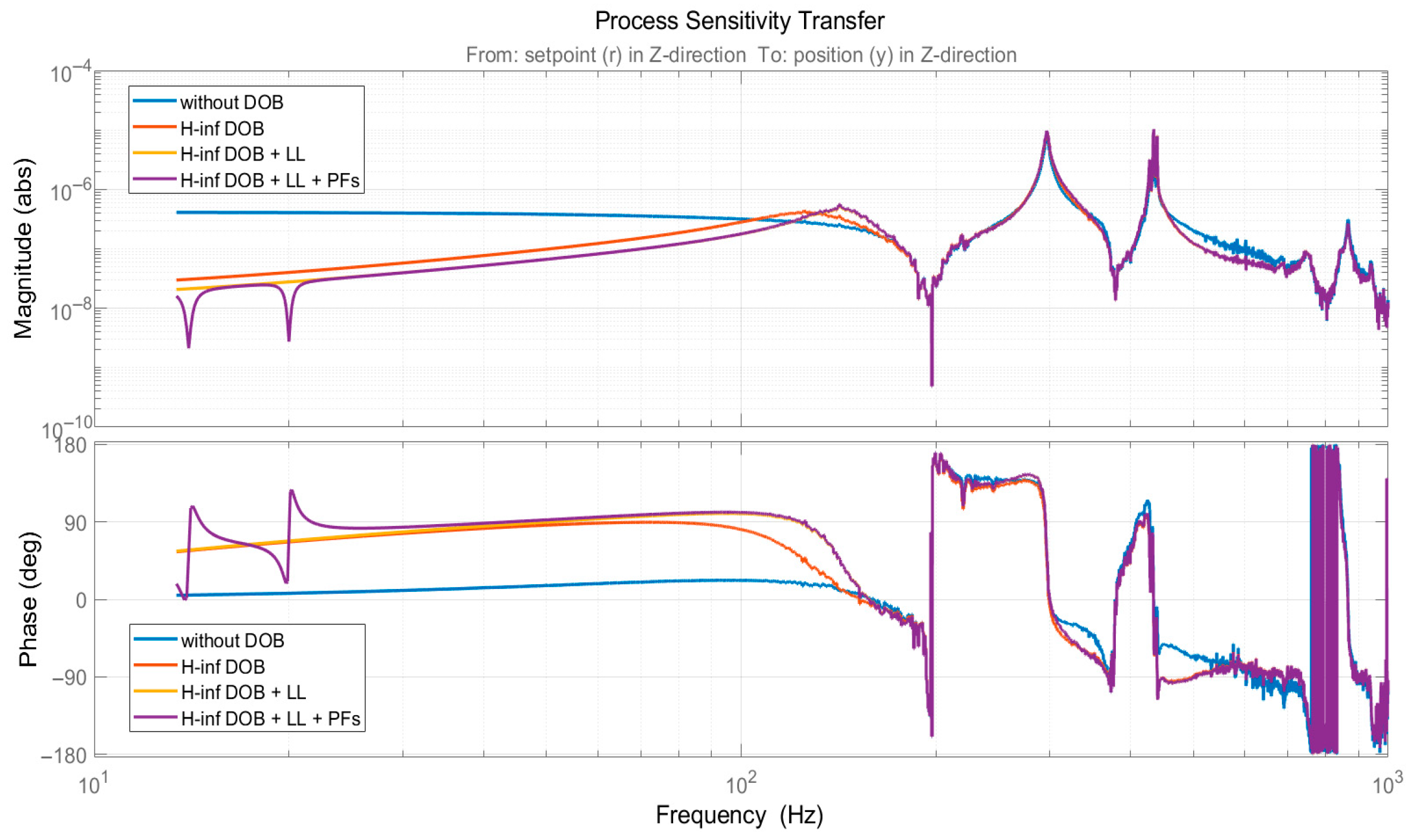
- Decoupling the Disturbance Observer (DOB) loop from the outer control loop, the method constructs extended DOB loop with zero output from the outer control loop. Then, it uses H∞ mixed-sensitivity shaping technology to design a Q-filter. The H∞ DOBC is used for the overall suppression of wideband time-varying disturbances, significantly increasing the open-loop gain in the low-frequency range and enhancing the phase margin.
- The method combines DOBC with lead lag correction, which improves the open-loop gain in the low to mid frequency range, compensating for the open-loop gain loss in the mid frequency range introduced by the H∞ DOBC.
- Disturbance rejection filtering correction is used to suppress certain concentrated frequency bands in the flow field disturbances and improve the open-loop gain.
2. Materials and Methods
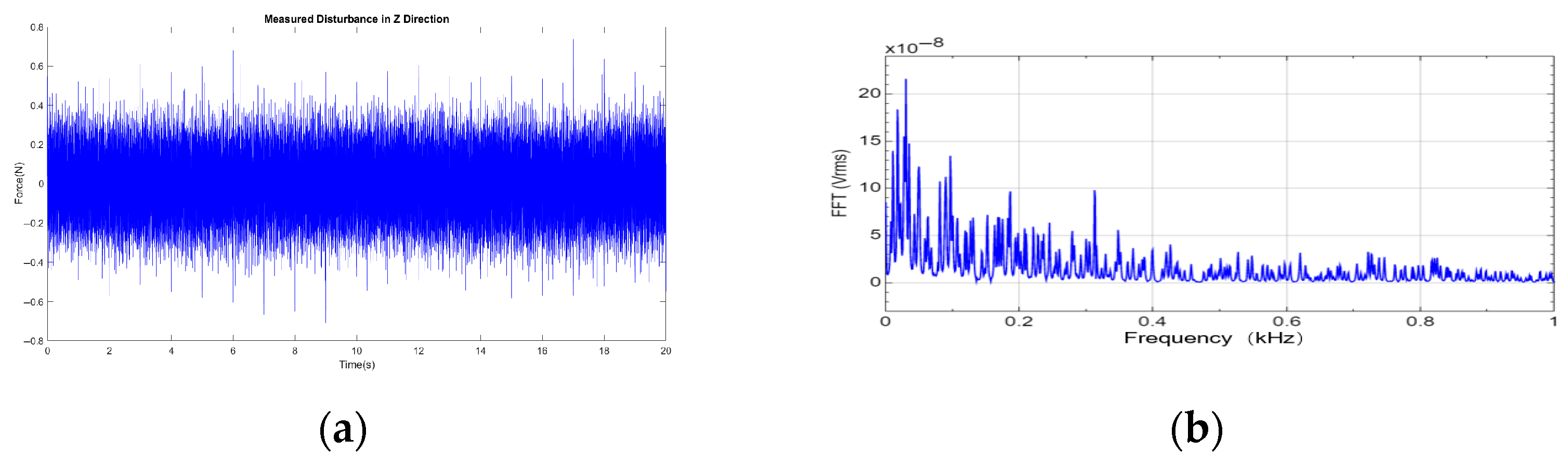
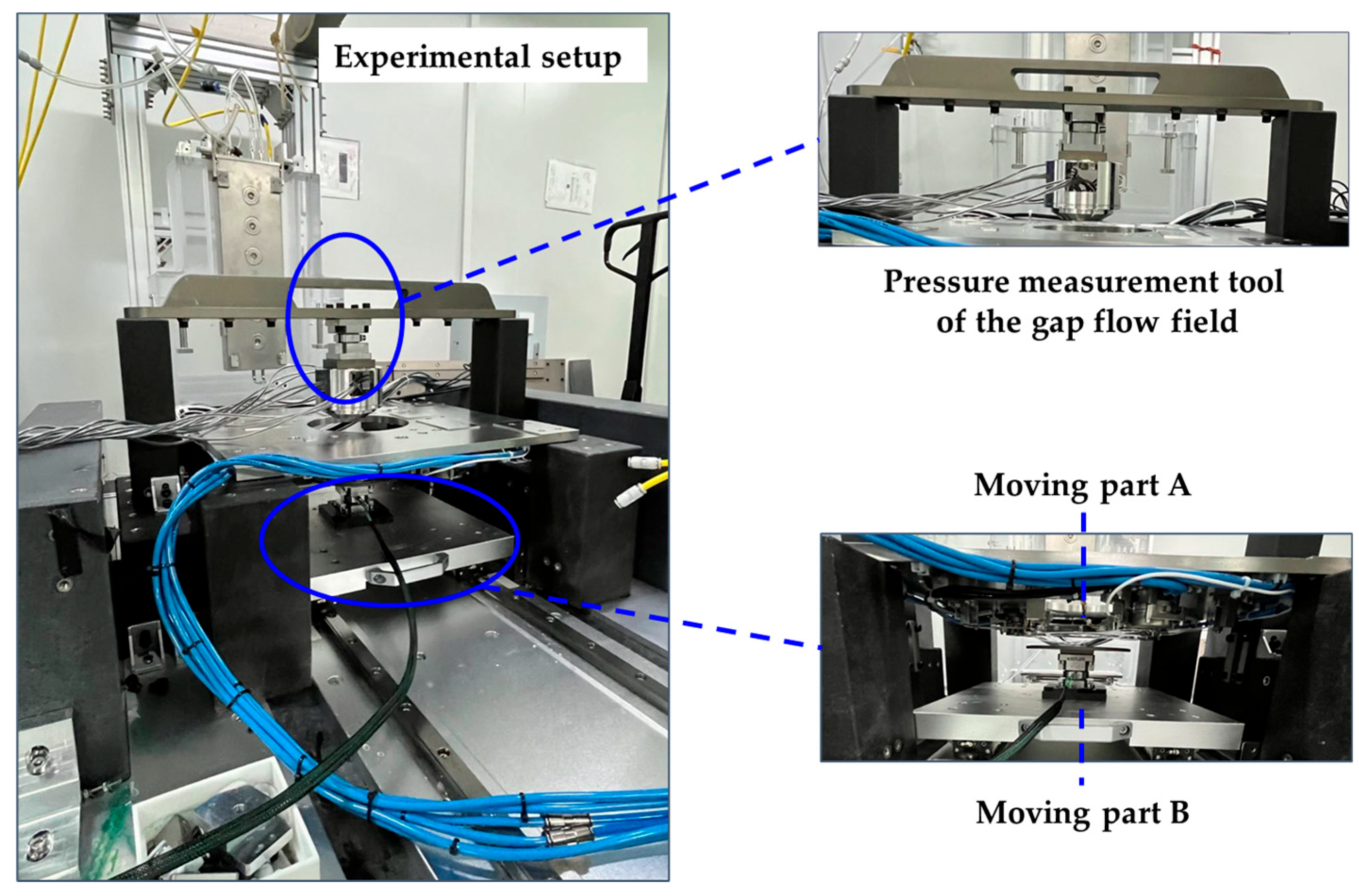
2.1. Disturbance Force Measurement
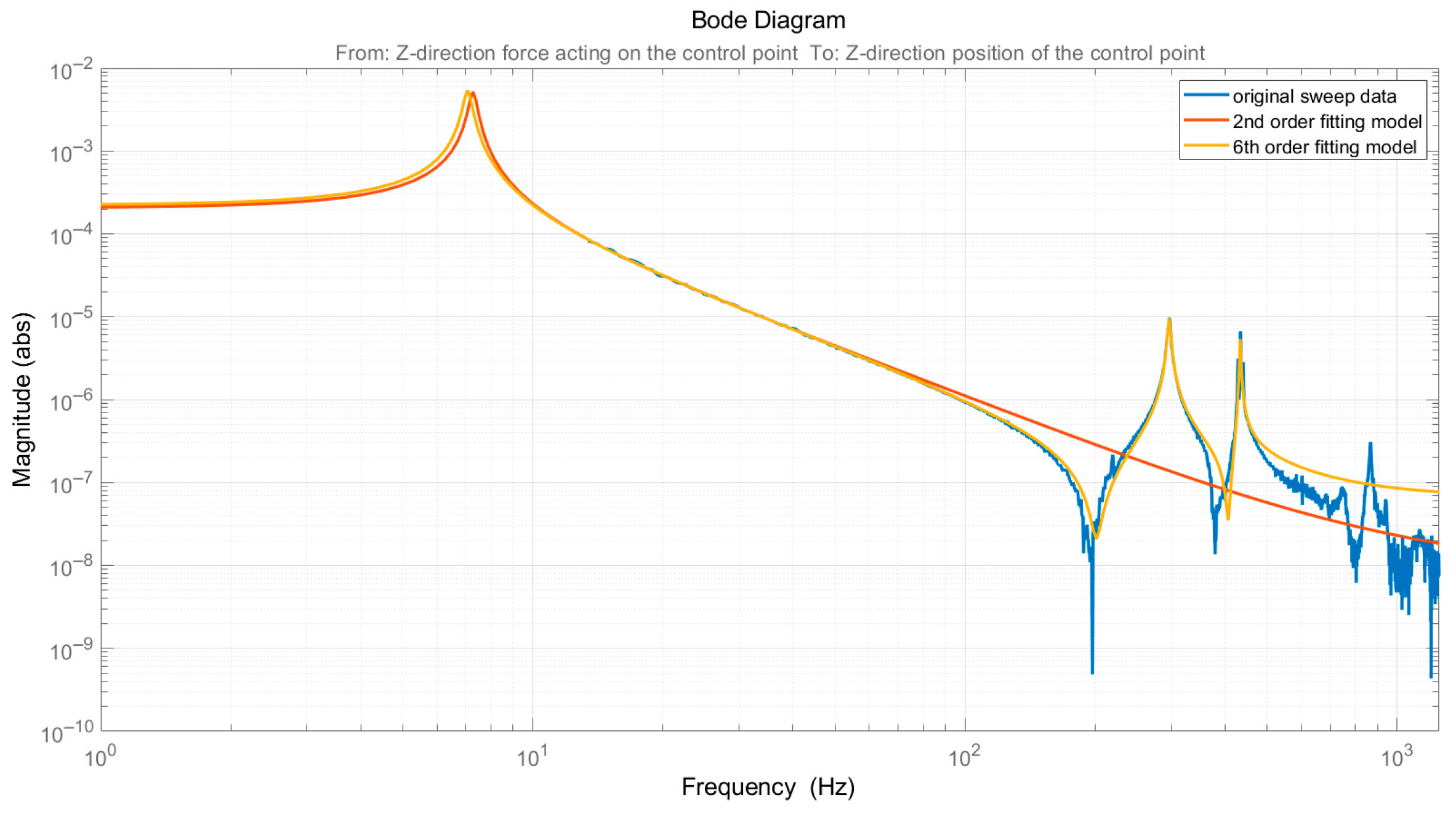
2.2. Plant Identification
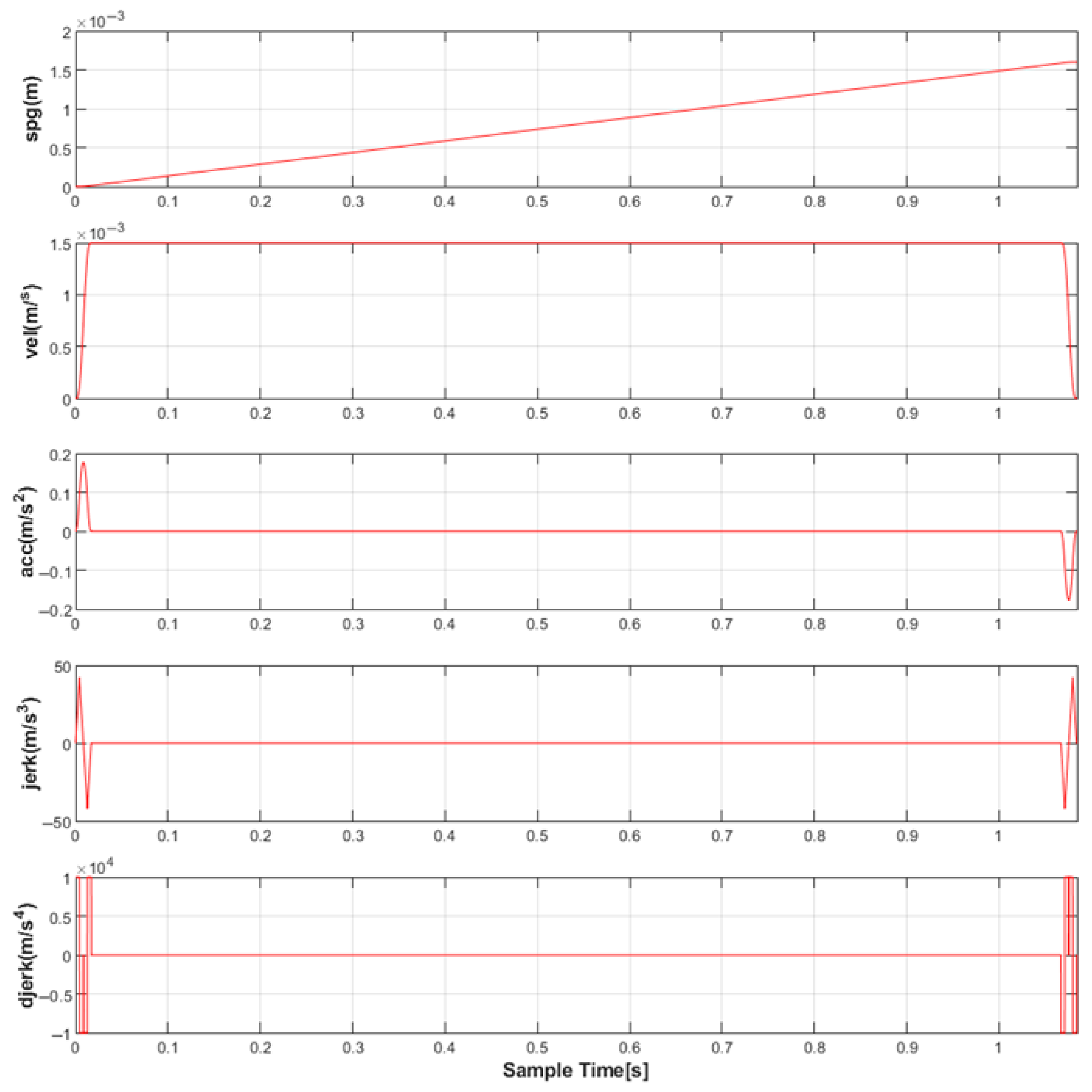
2.3. High-Order Reference Trajectory Planning
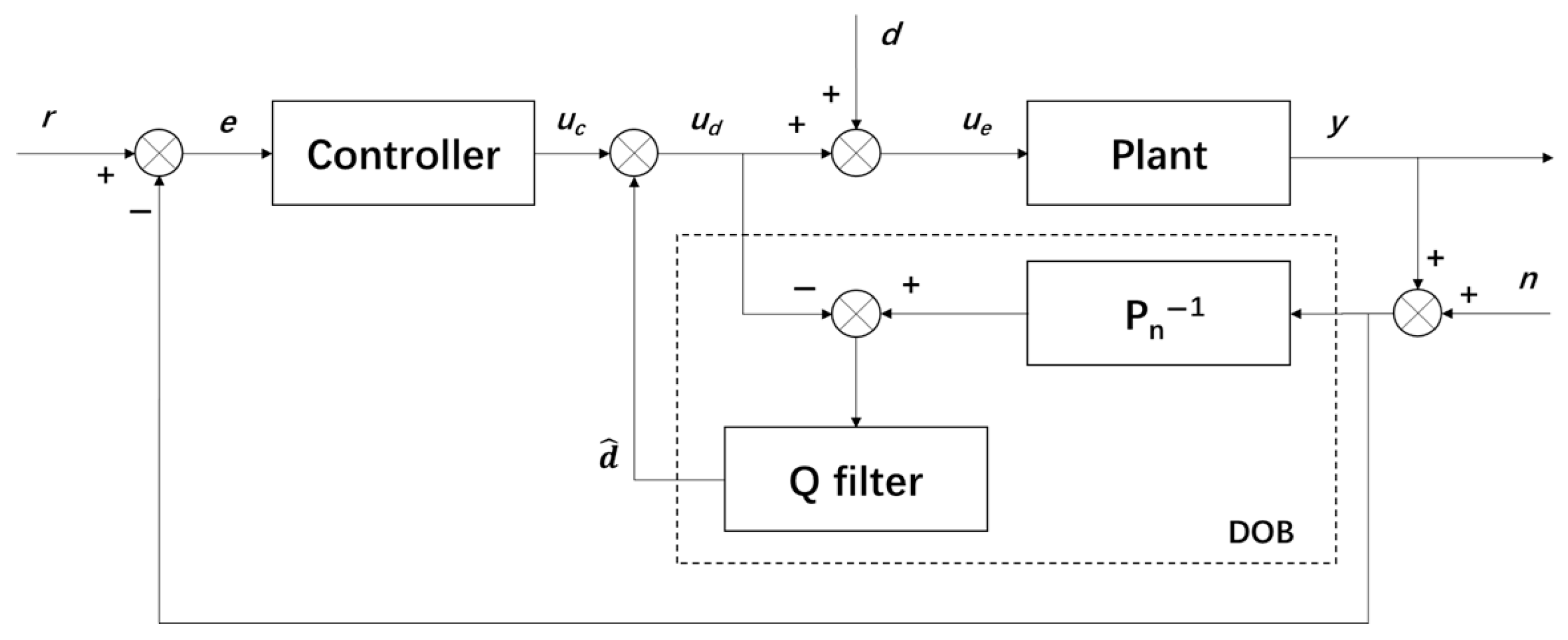
2.4. DOBC Design
2.4.1. Outer Control Loop Design
2.4.2. DOB Loop Design
- Based on the DOBC control architecture, the standard H∞ model for the Q-filter is constructed.
- Mixed-sensitivity weight functions are constructed based on disturbance evaluation error sensitivity and disturbance evaluation compensation sensitivity.
- Based on the H∞ model, the generalized plant is constructed.
- The H∞ model is used to solve the Q-filter;
- The nonlinear least squares method is applied to perform order reduction on the Q-filter.
- A.
- The standard H∞ model is constructed for the Q-filter
- B.
- Constructing the mixed-sensitivity weight functions
- C.
- Constructing the generalized plant
- D.
- Solving the Q-filter
- E.
- Reduced the Q-filter’s order
2.4.3. The Transfer Function of H∞ DOB Controller
2.5. Lead Lag Correction
2.6. Disturbance Rejection Filtering Correction
3. Experiments and Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, J.H.; Gao, D.R.; Wang, Q. Research on static performance of water-lubricated hybrid bearing with constant flow supply. Recent Dev. Intell. Syst. Interact. Appl. 2017, 541, 66–72. [Google Scholar]
- Zhao, X.L.; Zhang, J.A.; Dong, H. Influence of variable section throttle on performance of aero-static bearings. Opt. Precis. Eng. 2018, 26, 2446–2454. [Google Scholar] [CrossRef]
- Xu, P.; Luo, J.; Yu, Y.H.; Shen, J.X.; Li, W.L. Comprehensive performance and optimization of micro textured slipper pair of axial piston pumps. Sci. Rep. 2025, 15, 12508. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.L.; Sun, X.H.; Li, Y.Y. Annulus flow field characteristics of the barreled material pipe hydraulic transportation. J. Chongqing Jiaotong Univ. Nat. Sci. 2014, 33, 75–78. [Google Scholar]
- Cheng, L.X.; Ribatski, G.; Thome, J.R. Two-phase flow patterns and flow-pattern maps: Fundamentals and applications. Appl. Mech. Rev. 2008, 61, 050802. [Google Scholar] [CrossRef]
- Shao, N.; Gavriilidis, A.; Angeli, P. Flow regimes for adiabatic gas–liquid flow in microchannels. Chem. Eng. Sci. 2009, 64, 2749–2761. [Google Scholar] [CrossRef]
- Pohorecki, R.; Sobieszuk, P.; Kula, K.; Moniuk, W.; Zieliński, M.; Cygański, P.; Gawiński, P. Hydrodynamic regimes of gas–liquid flow in a microreactor channel. Chem. Eng. J. 2008, 135, S185–S190. [Google Scholar] [CrossRef]
- Lee, C.Y.; Lee, S.Y. Influence of surface wettability on transition of two-phase flow pattern in round mini-channels. Int. J. Multiph. Flow 2008, 34, 706–711. [Google Scholar] [CrossRef]
- Shao, N.; Salman, W.; Gavriilidis, A.; Angeli, P. CFD simulations of the effect of inlet conditions on Taylor flow formation. Int. J. Heat Fluid Flow 2008, 29, 1603–1611. [Google Scholar] [CrossRef]
- Farmer, D.G.; Shepherd, J.J. Slip flow in the gas-lubricated Rayleigh step-slider bearing. Appl. Mech. Eng. 2006, 11, 593. [Google Scholar]
- Rahmani, R.; Shirvani, A.; Shirvani, H. Analytical analysis and optimisation of the Rayleigh step slider bearing. Tribol. Int. 2009, 42, 666–674. [Google Scholar] [CrossRef]
- Kumar, R.; Azam, M.S.; Ghosh, S.K.; Khan, H. Effect of surface roughness and deformation on Rayleigh step bearing under thin film lubrication. Ind. Lubr. Tribol. 2017, 69, 1016–1032. [Google Scholar] [CrossRef]
- Thompson, P.A.; Troian, S.M. A general boundary condition for liquid flow at solid surfaces. Nature 1997, 389, 360–362. [Google Scholar] [CrossRef]
- Spikes, H.; Granick, S. Equation for slip of simple liquids at smooth solid surfaces. Langmuir 2003, 19, 5065–5071. [Google Scholar] [CrossRef]
- Han, J.Q. Auto-disturbances-rejection controller and its applications. Control Decis. 1998, 13, 19–23. [Google Scholar]
- Gao, Z.Q. ADRC: The deep roots and the latest developments. Control Theory Appl. 2023, 40, 593–595. [Google Scholar]
- Wang, Y.F.; Tian, Y.C. Present status and future developments of adaptive fuzzy control. Control Eng. China 2006, 13, 193–198. [Google Scholar]
- Ohnishi, K.; Murakami, T. Advanced motion control in robotics. IEEE Ind. Electron. Soc. 1989, 2, 356–359. [Google Scholar]
- Guo, L. Composite Hierarchical Anti-Disturbance Control (CHADC) for Systems with Multiple Disturbances: Survey and Overview. In Proceedings of the 30th Chinese Control Conference (CCC2011), Yantai, China, 22–24 July 2011. [Google Scholar]
- Yang, Y.; Wei, Y.; Lou, J.; Fu, L.; Fang, S.; Chen, T. Dynamic modeling and adaptive vibration suppression of a high-speed macro-micro manipulator. J. Sound Vib. 2018, 422, 318–342. [Google Scholar] [CrossRef]
- Smith, J.; Su, J.; Liu, C.; Chen, W.H. Disturbance observer based control with anti-windup applied to a small fixed wing UAV for disturbance rejection. J. Intell. Robot. Syst. 2017, 88, 329–346. [Google Scholar] [CrossRef]
- Prawda, K.; Schlecht, S.J.; Välimäki, V. Robust selection of clean swept-sine measurements in non-stationary noise. J. Acoust. Soc. Am. 2022, 151, 2117–2126. [Google Scholar] [CrossRef] [PubMed]
- Zhou, W.J.; Chen, X.J. Global convergence of a new hybrid Gauss–Newton structured BFGS method for nonlinear least squares problems. Soc. Ind. Appl. Math. 2010, 20, 2422–2441. [Google Scholar] [CrossRef]
- Zhou, L.; Yang, S.H.; Gao, X.D. A fast fourth-order trajectory planning and feedforward control algorithm. J. Sichuan Univ. 2011, 43, 244–250. [Google Scholar]
- Yin, Z.N.; Su, J.B.; Gao, X.X. Systematic design method of disturbance observer guaranteeing closed-loop systems robust stability. Acta Autom. Sin. 2012, 38, 12–22. [Google Scholar] [CrossRef]
- Chen, B.M. H∞ Control and Its Applications; Springer: Berlin/Heidelberg, Germany, 2013; Volume 235, pp. 1–8. [Google Scholar]
- Kim, K.S.; Park, Y.; Oh, S.H. Designing robust sliding hyperplanes for parametric uncertain systems: A Riccati approach. Automatica 2000, 36, 1041–1048. [Google Scholar] [CrossRef]
- Wilamowski, B.M.; Yu, H. Improved computation for Levenberg–Marquardt training. IEEE Trans. Neural Netw. 2010, 21, 930–937. [Google Scholar] [CrossRef] [PubMed]
- Dewantoro, G.; Rizky, I.S.; Murtianta, B. Frequency response analysis of microcontroller-based discrete-time lead-lag compensators. Arch. Electr. Eng. 2020, 69, 937–950. [Google Scholar]
- Zheng, J.; Guo, G.; Wang, Y.; Wong, W.E. Optimal narrow-band disturbance filter for PZT-actuated head positioning control on a spinstand. IEEE Trans. Magn. 2006, 42, 3745–3751. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Challenges | Traditional Methods | This H∞ DOBC Method |
|---|---|---|
| Special plant characteristics, such as flexibility, multimodality, system delay and so on | Gain decrease in the low-frequency band and resonance peaks in the mid-to-high frequency bands | High open-loop gain in the low-frequency band and no resonance peaks |
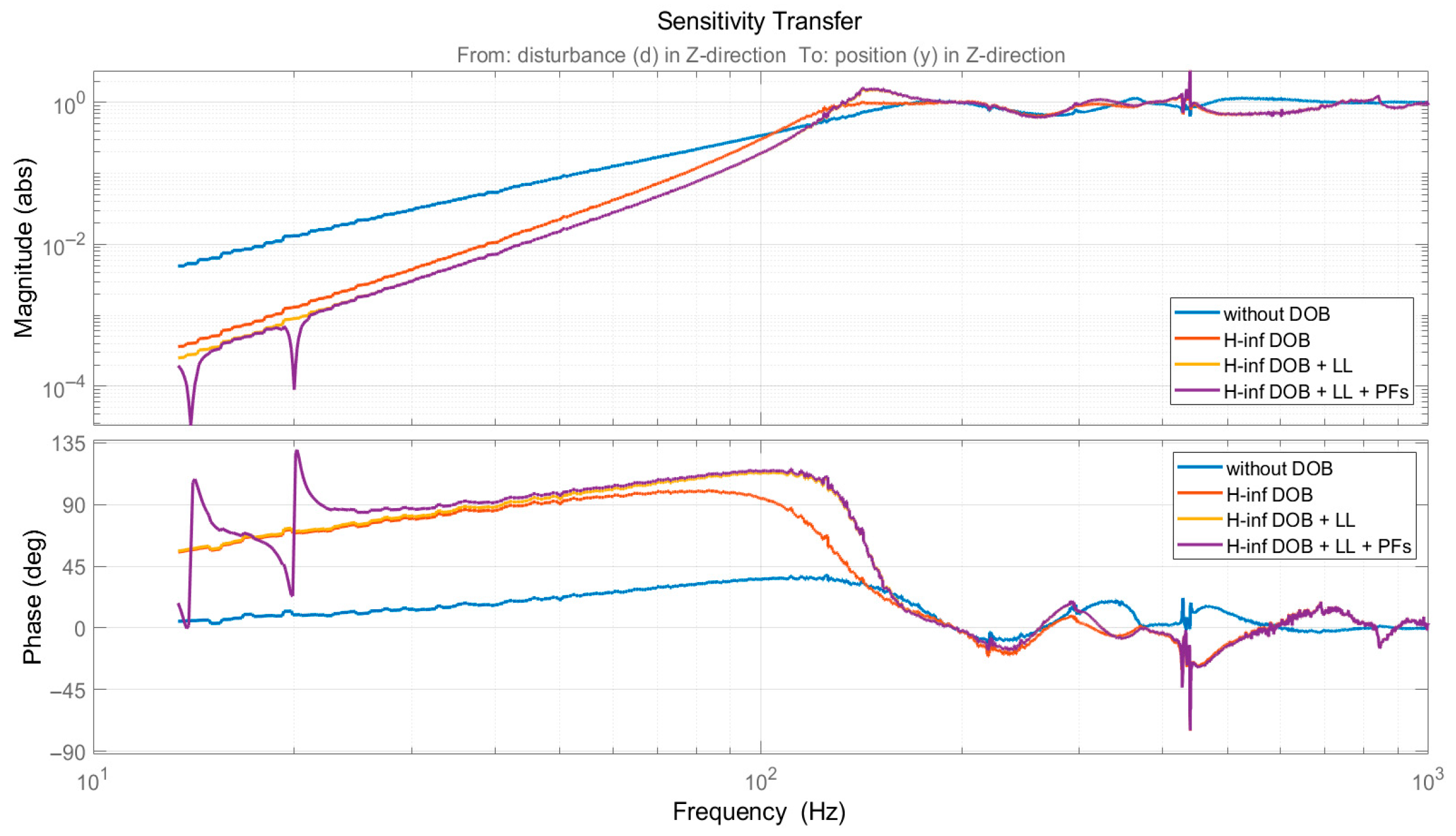
| Wideband time-varying external disturbance | Large disturbance sensitivity | Small disturbance sensitivity over a wide frequency range, and extremely small disturbance sensitivity in peak frequency |
| Special control requirements | Cannot simultaneously achieve high open-loop gain and large phase margin | Simultaneously achieve high open-loop gain and sufficient phase margin |
| Characteristic | Traditional Method | H∞ DOBC Method | H∞ DOBC + LL Method | H∞ DOBC + LL + PFs Method |
|---|---|---|---|---|
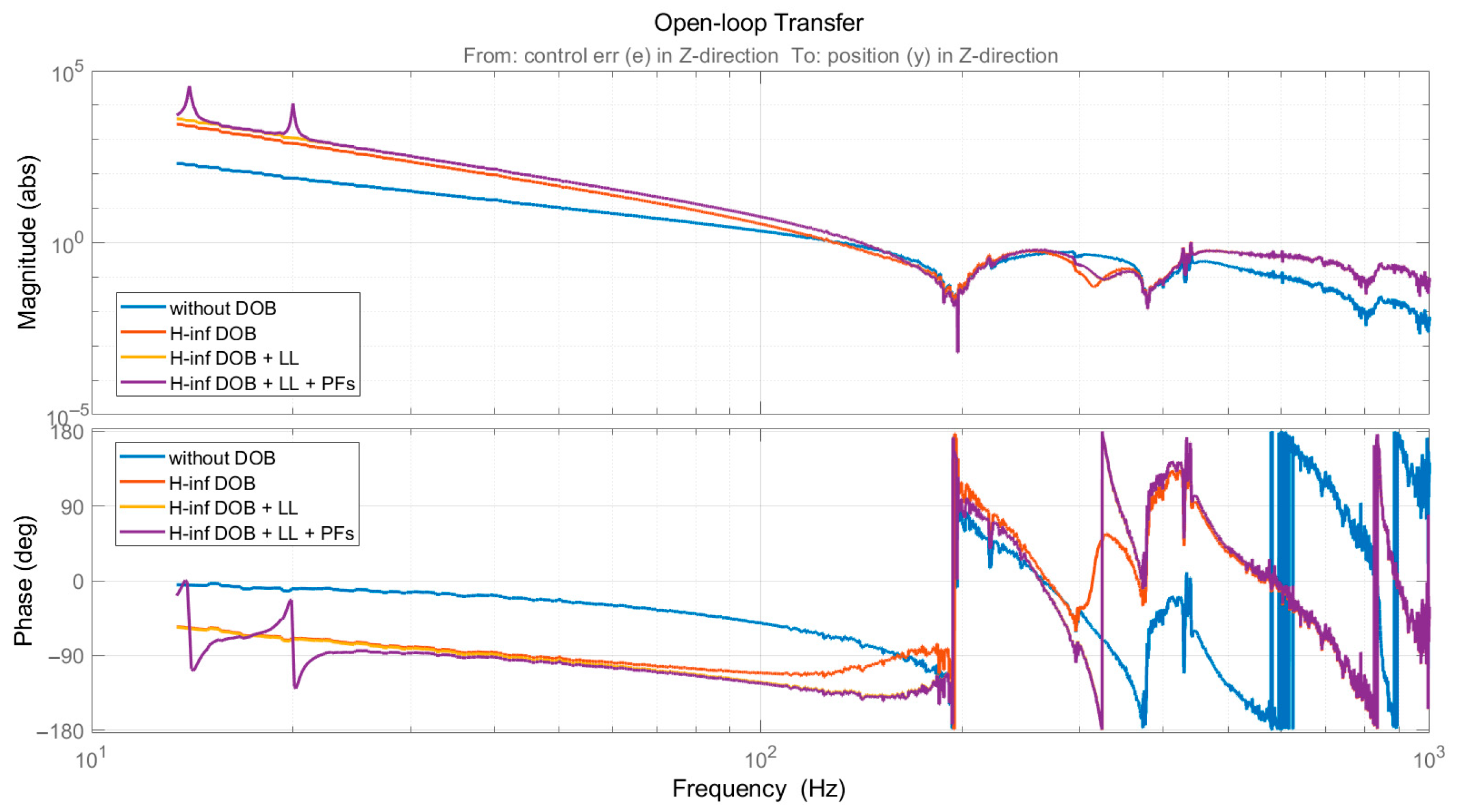
| Open-loop gain @ 20 Hz [abs] | 74.8 | 770.0 | 1110.0 | 11,200.0 |
| Open-loop bandwidth [Hz] | 131 | 129 | 141 | 141 |
| Phase margin [degree] | 111.0 | 68.6 | 42.6 | 41.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, J.; Ruan, X.; Wang, J.; Su, R.; Hu, L. Precise Control of Following Motion Under Perturbed Gap Flow Field. Actuators 2025, 14, 364. https://doi.org/10.3390/act14080364
Luo J, Ruan X, Wang J, Su R, Hu L. Precise Control of Following Motion Under Perturbed Gap Flow Field. Actuators. 2025; 14(8):364. https://doi.org/10.3390/act14080364
Chicago/Turabian StyleLuo, Jin, Xiaodong Ruan, Jing Wang, Rui Su, and Liang Hu. 2025. "Precise Control of Following Motion Under Perturbed Gap Flow Field" Actuators 14, no. 8: 364. https://doi.org/10.3390/act14080364
APA StyleLuo, J., Ruan, X., Wang, J., Su, R., & Hu, L. (2025). Precise Control of Following Motion Under Perturbed Gap Flow Field. Actuators, 14(8), 364. https://doi.org/10.3390/act14080364