
The Small Frontier: Trends Toward Miniaturization and the Future of Planetary Surface Rovers

 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Historical Planetary Surface Exploration Robots
2.1. Planetary Surface Robot Taxonomy
2.2. Planetary Rover Sizing
3. The Miniaturization of Planetary Rovers
3.1. Prop-M: The Original Nano-Rover
3.2. Iris: A More Modern Nano-Rover
3.3. SORA-Q: A Pico-Rover
3.4. COLMENA: A Femto-Rover
3.5. Small-Scale Actuation and Locomotion

| Name | Wheel Count | Suspension/Mobility | Distance Traveled (m) |
|---|---|---|---|
| Lunokhod 1 | 8 | Torsion Bar | 11,000 [11] |
| Prop-M (1) | na | Rotating Skis | Not Deployed |
| Prop-M (2) | na | Rotating Skis | Unknown [11] |
| Lunokhod 2 | 8 | Torsion Bar | 37,000 [11] |
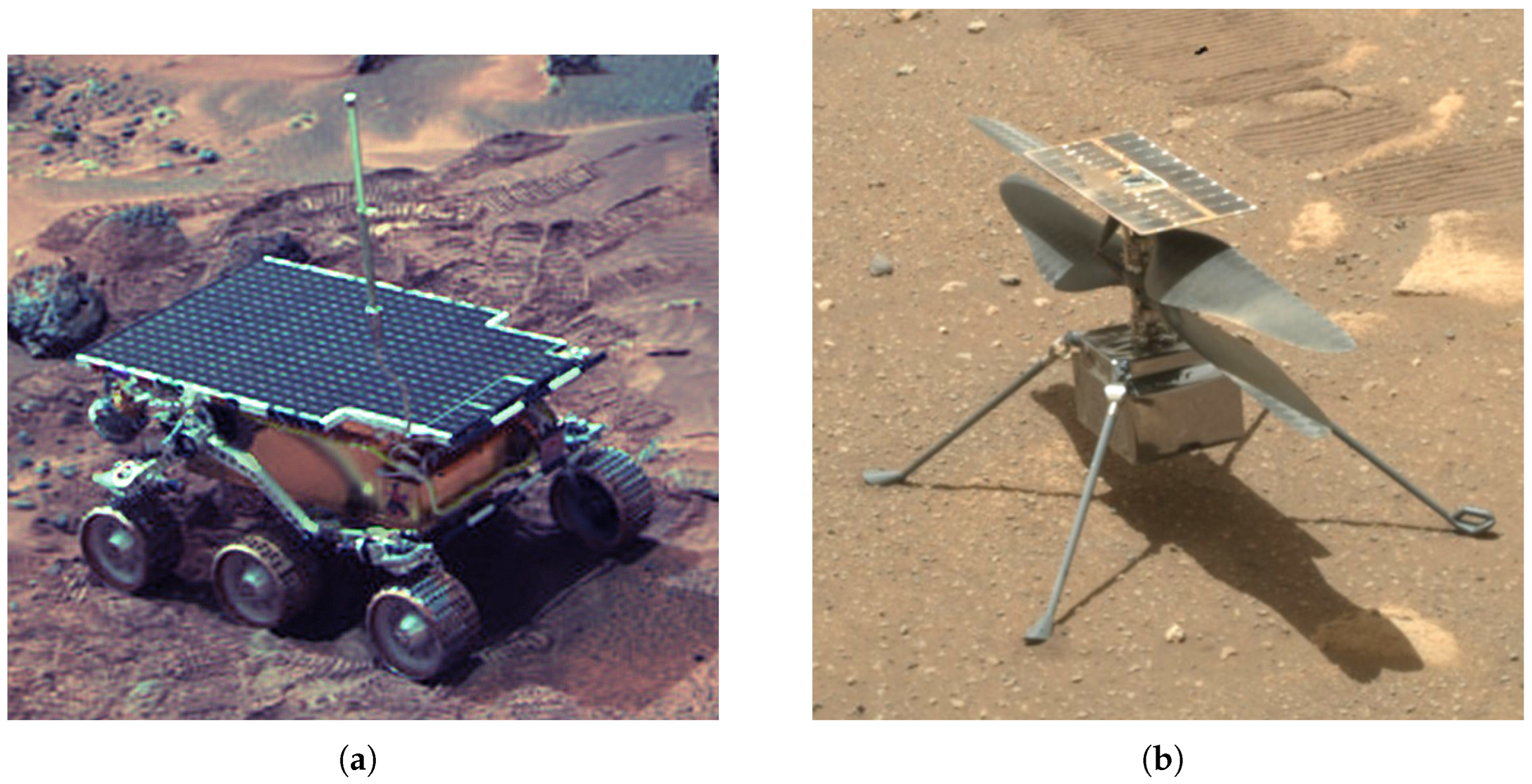
| Sojourner | 6 | Rocker-Bogie | 106 [11] |
| PLUTO | na | Internal Hammer [18] | Not Deployed |
| MER A | 6 | Rocker-Bogie | 7730 [11] |
| MER B | 6 | Rocker-Bogie | 45,161 [44] |
| MINERVA | na | Rotating Torquer | No Surface Operation [19] |
| MSL | 6 | Rocker-Bogie | 35,270 † [45] |
| Yutu 1 | 6 | Rocker-Bogie | 100 [20] |
| MINERVA II-1A | na | Rotating Torquer [21] | Unclear, non zero |
| MINERVA II-1B | na | Rotating Torquer [21] | Unclear, non zero |
| Yutu 2 | 6 | Rocker-Bogie ‡ | 1613 [46] |
| Pragyan 1 | 6 | Rocker-Bogie | Not Deployed [47] |
| Mars 2020 | 6 | Rocker-Bogie [12] | 35,480 † [48] |
| Ingenuity | na | Coaxial Helicopter | 16,971 [49] |
| Zhurong | 6 | Rocker-Bogie * [50] | 1900 [51] |
| Pragyan 2 | 6 | Rocker-Bogie [23] | 103 [52] |
| Rashid | 4 | Articulated Suspension [43] | Not Deployed |
| Sora-Q (1) | 2 | Eccentric Wheels [42] | Not Deployed |
| COLMENA | 2 | Fixed Wheels ‡ | Not Deployed |
| Iris | 4 | Fixed Wheels [38] | Not Deployed |
| LEV 1 | 1 | Hopping Pad/Wheel [53] | Unclear, non zero |
| LEV2 (Sora-Q 2) | 2 | Eccentric Wheels [42] | Unclear, non zero |
| Jinchan | 4 | Fixed Wheels ‡ [31] | Unclear, non zero |
| YAOKI | 2 | Fixed Coaxial Wheels ‡ [32] | Not Deployed |
| Tenacious | 4 | Fixed Wheel ‡ [54] | Not Deployed |
4. Future Developmental Pipeline
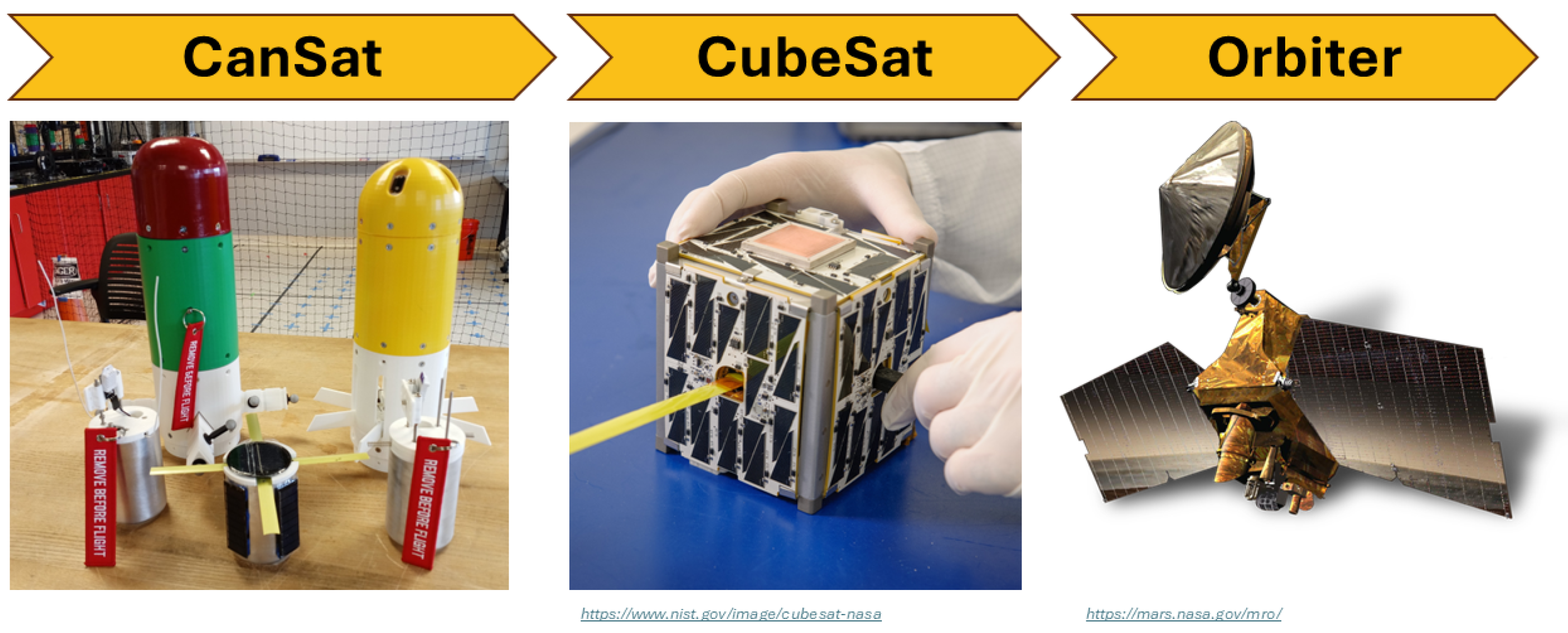
4.1. CubeSats and CanSats
4.2. From CanSats to CanBots
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ARLISS | A Rocket Launch for International Student Satellites |
| CLPS | Commercial Lunar Payload Services |
| COTS | Commercial Off-The-Shelf |
| EDL | Entry, Descent, and Landing |
| EOL | End Of Life |
| FIDO | Field-Integrated Design and Operations |
| JAXA | Japan Aerospace Exploration Agency |
| LEO | Low Earth Orbit |
| LEV | Lunar Excursion Vehicles |
| MER | Mars Exploration Rover |
| MSL | Mars Science Laboratory |
| NASA | National Aeronautics and Space Administration |
| SLIM | Smart Lander for Investigating Moon |
| TRL | Technology Readiness Level |
| USA | United States of America |
| USSR | Union of Soviet Socialist Republics |
| USS | University Space Systems Symposium |
References
- The Planetary Society. Apollo Costs. 2024. Available online: https://www.planetary.org/space-policy/cost-of-apollo (accessed on 5 July 2024).
- National Aeronautics and Space Administration. The Artemis Plan. 2020. Available online: https://www.nasa.gov/wp-content/uploads/2020/12/artemis_plan-20200921.pdf?emrc=f43185 (accessed on 26 January 2024).
- O’Shea, C.A. Artemis Manned Landers. 2023. Available online: https://www.nasa.gov/news-release/nasa-selects-blue-origin-as-second-artemis-lunar-lander-provider/ (accessed on 7 February 2024).
- Jeffery Rubio. CLIPS. 2023. Available online: https://www.nasa.gov/reference/commercial-lunar-payload-services/ (accessed on 7 February 2024).
- Sparrow, G.; John, J.; McNab, C. The Illustrated Encyclopedia of Space and Space Exploration; OCLC: 900634681; Metro Books: London, UK, 2014. [Google Scholar]
- Williams, D.R. Luna 2. 2022. Available online: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=1959-014A (accessed on 7 February 2024).
- Williams, D.R. Ranger 7. 2022. Available online: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=1964-041A (accessed on 7 February 2024).
- Williams, D.R. Lunar Orbiter 1. 2022. Available online: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=1966-073A (accessed on 7 February 2024).
- Williams, D.R. Surveyor 6. 2022. Available online: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=1967-112A (accessed on 29 November 2023).
- Williams, D.R. Luna 17/Lunokhod 1. 2022. Available online: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=1970-095A (accessed on 7 February 2024).
- Ellery, A. Planetary Rovers: Robotic Exploration of the Solar System; Springer Praxis Books Astronautical Engineering; Praxis: Berlin, Germany, 2016. [Google Scholar]
- Baker, D. NASA Mars Rovers: 1997–2013 (Sojourner, Spirit, Opportunity and Curiousity): An Insight into the Technology, History, and Development of NASA’s Mars Exploration Roving Vehicles; Owners’ Workshop Manual; Haynes Publishing: Somerset, UK, 2013; OCLC: ocn826659106. [Google Scholar]
- Soyer, S. Small space can: CanSat. In Proceedings of the 5th International Conference on Recent Advances in Space Technologies—RAST2011, Istanbul, Turkey, 9–11 June 2011; pp. 789–793. [Google Scholar] [CrossRef]
- NASA. After Three Years on Mars, NASA’s Ingenuity Helicopter Mission Ends. 2024. Available online: https://mars.nasa.gov/news/9540/after-three-years-on-mars-nasas-ingenuity-helicopter-mission-ends/ (accessed on 9 February 2024).
- NASA. NASA’s Dragonfly Will Fly Around Titan Looking for Origins, Signs of Life. 2019. Available online: https://www.nasa.gov/news-release/nasas-dragonfly-will-fly-around-titan-looking-for-origins-signs-of-life/ (accessed on 9 February 2024).
- NASA/JPL. PIA01122: Sojourner Rover Near “The Dice”. 1997. Available online: https://photojournal.jpl.nasa.gov/catalog/PIA01122 (accessed on 9 February 2024).
- NASA/JPL-Caltech. Mars Perseverance Sol 46: WATSON Camera. 2021. Available online: https://mars.nasa.gov/mars2020/multimedia/raw-images/index.cfm?urlpath=SI1_0046_0671022109_238ECM_N0031416SRLC07021_000085J&mission=mars2020 (accessed on 9 February 2024).
- Richter, L.; Gromov, V.V.; Kochan, H.; Kosacki, K.; Tokano, T. The Planetary Underground Tool (PLUTO) Experiment on the Beagle 2 Mars Lander. In Proceedings of the Sixth International Conference on Mars, Caltech, CA, USA, 20–25 July 2003; p. 3180. [Google Scholar]
- Yoshimitsu, T.; Kubota, T.; Nakatani, I. MINERVA Rover which Became a Small Artificial Solar Satellite. In Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Digital Commons, Logan, UT, USA, 14–17 August 2006; p. SSC06-IV-4. [Google Scholar]
- Stephen Clark. China’s Yutu Rover Dies on the Moon. 2016. Available online: https://spaceflightnow.com/2016/08/04/chinas-yutu-rover-dies-on-the-moon/ (accessed on 13 November 2023).
- Yoshimitsu, T.; Kubota, T. Asteroid Surface Exploration by Minerva-II Small Rovers. In Proceedings of the 18th Annual Meeting of the Asia Oceania Geosciences Society, Virtual, 1–6 August 2022; pp. 180–182. [Google Scholar] [CrossRef]
- Williams, D.R. Chang’e 4. 2023. Available online: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=2018-103A (accessed on 7 February 2024).
- Williams, D.R. Chandrayaan 3. 2022. Available online: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=2023-098A (accessed on 11 January 2024).
- NASA. Mars Perseverance Press Kit. 2021. Available online: https://www.jpl.nasa.gov/news/press_kits/mars_2020/download/mars_2020_landing_press_kit.pdf (accessed on 2 October 2023).
- Withrow, S.; Johnson, W.; Young, L.A.; Koning, W.; Kuang, W.; Malpica, C.; Balaram, J.; Tzanetos, T. Mars science helicopter: Conceptual design of the next generation of mars rotorcraft. In Proceedings of the AIAA ASCEND Conference, Virtual, 16–18 November 2020; p. 4029. [Google Scholar]
- Ding, L.; Zhou, R.; Yu, T.; Gao, H.; Yang, H.; Li, J.; Yuan, Y.; Liu, C.; Wang, J.; Zhao, Y.Y.S.; et al. Surface characteristics of the Zhurong Mars rover traverse at Utopia Planitia. Nat. Geosci. 2022, 15, 171–176. [Google Scholar] [CrossRef]
- Williams, D.R. Hakuto-R M1.; 2022. Available online: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=2022-168A (accessed on 7 February 2024).
- Tingley, B. Mexico’s 1st Moon Mission Will Send 5 Tiny Robots Aloft on Peregrine Lunar Lander Jan. 8. 2024. Available online: https://www.space.com/peregrine-lunar-lander-mexico-colmena-micro-robots (accessed on 9 February 2024).
- Koo, K.W.; Kim, H.D. Trends in Development of Micro Rovers for Planetary Exploration. J. Space Technol. Appl. 2023, 3, 213–228. [Google Scholar] [CrossRef]
- Williams, D.R. Smart Lander for Investigating Moon. 2022. Available online: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=2023-137D (accessed on 7 February 2024).
- David, L. Get an Up-Close Look at China’s Chang’e 6 Farside Moon Rover. Available online: https://www.space.com/china-change-6-moon-far-side-minirover (accessed on 4 July 2025).
- Dymon Co. Lunar Rover “YAOKI”. Available online: https://dymon.co.jp/en/yaoki/ (accessed on 1 July 2025).
- Williams, D.R. Resilience. Available online: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=RESILIENC (accessed on 1 July 2025).
- Ulivi, P.; Harland, D.M. Robotic Exploration of the Solar System: Part 1: The Golden Age 1957–1982; Springer: New York, NY, USA, 2007. [Google Scholar]
- Ajwad, S.A.; Iqbal, J. Recent Advances and Applications of Tethered Robotic Systems. Sci. Int. 2014, 26, 2045–2051. [Google Scholar]
- Gao, Y. Contemporary Planetary Robotics: An Approach toward Autonomous Systems; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Truszkowski, W.; Rouff, C.; Akhavannik, M.; Tunstel, E. Robot Memetics: A Space Exploration Perspective; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar]
- Astrobotic. ASTROBOTIC CUBEROVER: Payload User’s Guide. 2024. Available online: https://www.astrobotic.com/wp-content/uploads/2024/01/Astrobotic_CubeRover-PUG_V2-2.pdf (accessed on 7 February 2024).
- Johnson, A. CMU’s Iris Rover: A Heartbeat in Space, A Legacy on Earth. 2024. Available online: https://www.cmu.edu/news/stories/archives/2024/january/cmus-iris-rover-a-heartbeat-in-space-a-legacy-on-earth (accessed on 8 February 2024).
- Amos, J. Stricken Japanese Moon Mission Landed on Its Nose. 2024. Available online: https://www.bbc.com/news/science-environment-68091389 (accessed on 9 February 2024).
- Chappell, B. Japan Succeeds in Soft Landing on the Moon, but Its Lander Has a Power Problem. 2024. Available online: https://www.npr.org/2024/01/18/1225328376/japan-moon-landing-robot-transformers-jaxa (accessed on 9 February 2024).
- Nagahashi, K. Toy Manufacturer’s ’Transformer’ Lunar Robot Sets Course for the Moon. 2023. Available online: https://japan-forward.com/toy-manufacturers-transformer-lunar-robot-sets-course-for-the-moon/ (accessed on 9 February 2024).
- Yakubu, M.; Zweiri, Y.; Abuassi, L.; Azzam, R.; Abubakar, A.; Busoud, A.; Seneviratne, L. A Novel Mobility Concept for Terrestrial Wheel-Legged Lunar Rover. IEEE Access 2025, 13, 15618–15638. [Google Scholar] [CrossRef]
- Verma, V.; Maimone, M.W.; Gaines, D.M.; Francis, R.; Estlin, T.A.; Kuhn, S.R.; Rabideau, G.R.; Chien, S.A.; McHenry, M.M.; Graser, E.J.; et al. Autonomous robotics is driving Perseverance rover’s progress on Mars. Sci. Robot. 2023, 8, eadi3099. [Google Scholar] [CrossRef] [PubMed]
- National Aeronautics and Space Administration. Where Is Curiosity? Available online: https://science.nasa.gov/mission/msl-curiosity/location-map/ (accessed on 3 July 2025).
- Global Times. Yutu-2 Becomes World’s Longest-Working Lunar Rover. Available online: https://www.globaltimes.cn/page/202409/1319962.shtml (accessed on 3 July 2025).
- Williams, D.R. Chandrayaan 2. 2022. Available online: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=2019-042A (accessed on 7 February 2024).
- National Aeronautics and Space Administration. Where is Perseverance? Available online: https://science.nasa.gov/mission/mars-2020-perseverance/location-map/ (accessed on 3 July 2025).
- National Aeronautics and Space Administration. Ingenuity Mars Helicopter. Available online: https://science.nasa.gov/mission/mars-2020-perseverance/ingenuity-mars-helicopter/ (accessed on 3 July 2025).
- Chen, Z.; Zou, M.; Pan, D.; Chen, L.; Liu, Y.; Yuan, B.; Zhang, Q. Study on climbing strategy and analysis of Mars rover. J. Field Robot. 2023, 40, 1172–1186. [Google Scholar] [CrossRef]
- Xinhua. China’s Zhurong Travels over 1.9 km on Mars. Available online: https://www.chinadailyhk.com/hk/article/269931 (accessed on 3 July 2025).
- Vadawale, S.V.; Mithun, N.P.S.; Shanmugam, M.; Basu Sarbadhikari, A.; Sinha, R.K.; Bhatt, M.; Vijayan, S.; Srivastava, N.; Shukla, A.D.; Murty, S.V.S.; et al. Chandrayaan-3 APXS elemental abundance measurements at lunar high latitude. Nature 2024, 633, 327–331. [Google Scholar] [CrossRef] [PubMed]
- Otsuki, M.; Yoshikawa, K.; Maeda, T.; Usami, N.; Yoshimitsu, T. Design of Wheel Grouser Geometry with Reduced Sinkage for LEV-1 Lunar Rover. IEEE Robot. Autom. Lett. 2025, 10, 5633–5640. [Google Scholar] [CrossRef]
- ispace, Inc. ispace-EUROPE Announces Completion of First European Designed, Manufactured, and Assembled Lunar Micro Rover. Available online: https://ispace-inc.com/news-en/?p=5593 (accessed on 4 July 2025).
- National Aeronautics and Space Administration. Mars InSight Launch Press Kit. 2018. Available online: https://www.jpl.nasa.gov/news/press_kits/insight/launch/download/mars_insight_launch_presskit.pdf (accessed on 7 February 2024).
- Cappelletti, C.; Battistini, S.; Malphrus, B.K. CubeSat Handbook: From Mission Design to Operations; Academic Press: Cambridge, MA, USA, 2021; OCLC: on1296073107. [Google Scholar]
- Khali, M.; Miyazaki, Y. CanSat Pico Size Artificial Satellite, 4th ed.; University Space Engineering Consortium: Tokyo, Japan, 2017. [Google Scholar]
- Sako, N.; Tsuda, Y.; Ota, S.; Eishima, T.; Yamamoto, T.; Ikeda, I.; Ii, H.; Yamamoto, H.; Tanaka, H.; Tanaka, A.; et al. Cansat Suborbital Launch Experiment-University Educational Space Program Using Can Sized Pico-Satellite. Acta Astronaut. 2001, 48, 767–776. [Google Scholar] [CrossRef]
- Kulu, E. Database of Nanosatellites. 2024. Available online: https://www.nanosats.eu/ (accessed on 30 June 2025).
- Chun, C.; Tanveer, M.H.; Chakravarty, S. The CanSat Compendium: A Review of Scientific CanSats. Machines 2023, 11, 675. [Google Scholar] [CrossRef]
- European Space Agency. CANSAT: 2022–2023 Guidelines. 2022. Available online: https://www.esa.int/Education/CanSat (accessed on 1 May 2023).
- American Astronautical Society. CanSat Competition Guide 2023. 2022. Available online: https://www.cansatcompetition.com/docs/CanSat_Mission_Guide_2023i.pdf (accessed on 1 April 2023).
- Spencer, D.A.; Betts, B.; Bellardo, J.M.; Diaz, A.; Plante, B.; Mansell, J.R. The LightSail 2 solar sailing technology demonstration. Adv. Space Res. 2021, 67, 2878–2889. [Google Scholar] [CrossRef]
- Hashimoto, T.; Yamada, T.; Otsuki, M.; Yoshimitsu, T.; Tomiki, A.; Torii, W.; Toyota, H.; Kikuchi, J.; Morishita, N.; Kobayashi, Y.; et al. Nano Semihard Moon Lander: OMOTENASHI. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 20–30. [Google Scholar] [CrossRef]
- Antunes, S. DIY Satellite Platforms; O’Reilly: Springfield, MO, USA, 2012. [Google Scholar]
- Aydemir, M.E.; Celebi, M.; Ay, S.; Vivas, E.V.; Calle Bustinza, F.; Phan, D. Design and implementation of a rover-back CANSAT. In Proceedings of the 5th International Conference on Recent Advances in Space Technologies—RAST 2011, Istanbul, Turkey, 9–11 June 2011; pp. 800–803. [Google Scholar] [CrossRef]
- Celebi, M.; Ay, S.; Ibrahim, M.K.; Aydemir, M.E.; Bensaada, M.; Fernando, L.; Akiyama, H.; Yamaura, S. Design and navigation control of an advanced level CANSAT. In Proceedings of the 5th International Conference on Recent Advances in Space Technologies—RAST 2011, Istanbul, Turkey, 9–11 June 2011; pp. 752–757. [Google Scholar] [CrossRef]
- Joseph Nunez-Quispe, J. Design and Simulation of a Rover CanSat Non-pneumatic Wheel: Preliminary Study for a Certain Test Obstacle Path. In Proceedings of the 2021 12th International Conference on Mechanical and Aerospace Engineering (ICMAE), Athens, Greece, 16–19 July 2021; pp. 484–488. [Google Scholar] [CrossRef]
- Kizilkaya, M.O.; Oguz, A.E.; Soyer, S. CanSat descent control system design and implementation. In Proceedings of the 2017 8th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 19–22 June 2017; pp. 241–245. [Google Scholar] [CrossRef]
- Aliyev, I.; Misirli, C.A.; Ozturk, S.; Mahmurat, E.; Erkek, A.; Kok, S.; Kocyigit, D.; Uzun, S.; Vural, R.A. Design of solar powered subscale glider for CanSat competition. In Proceedings of the 2017 8th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, 19–22 June 2017; pp. 453–457. [Google Scholar] [CrossRef]
- Pradhan, E.; Dadheech, A.; Agarwal, H.; Singh, T.; Singari, R.M. Design Concept of a Model Can-sized Sub-orbital Satellite. J. Eng. Res. 2021, 79, 88. [Google Scholar] [CrossRef]
- Umit, M.E.; Cabanas, W.; Tetlow, M.; Akiyama, H.; Yamaura, S.; Olaleye, S. Development of a fly-back CANSAT in 3 weeks. In Proceedings of the Proceedings of 5th International Conference on Recent Advances in Space Technologies—RAST 2011, Istanbul, Turkey, 9–11 June 2011; pp. 804–807. [Google Scholar] [CrossRef]
- Ramadhan, R.P.; Ramadhan, A.R.; Putri, S.A.; Latukolan, M.I.C.; Edwar; Kusmadi. Prototype of CanSat with Auto-gyro Payload for Small Satellite Education. In Proceedings of the 2019 IEEE 13th International Conference on Telecommunication Systems, Services, and Applications (TSSA), Bali, Indonesia, 3–4 October 2019; pp. 243–248. [Google Scholar] [CrossRef]
- Meyer, B.; Donohue, B.; Creamer, A.; Puyana, M.; Ewere, F. Lunar Lava Tube Exploration with CubeRover: Wandering Observer of Lunar Features (WOLF) Rover. In Proceedings of the AIAA SCITECH 2023 Forum, National Harbor, MD, USA, 23–27 January 2023; p. 0016. [Google Scholar] [CrossRef]
- Oikawa, T.; De La Fuente, C.C.; Arbuckle, T.; Quinn, K.; Davis, A.; Rolley, R.; Whitaker, T.; Almujaheda, A.; Rampollaa, C.; Spotoa, J.; et al. Plan and Progression of the Technology Readiness Level of the CubeRover®. In Proceedings of the IAC-23, Baku, Azerbaijan, 2–6 October 2023; p. 75811. [Google Scholar]
- Schenker, P.S.; Baumgartner, E.T.; Backes, P.G.; Aghazarian, H.; Dorsky, L.I.; Norris, J.S. FIDO: A Field Integrated Design & Operations Rover for Mars Surface Exploration. In Proceedings of the 6th International Symposium on Artificial Intelligence, Robotics and Autonomous for Space, Quebec, QC, Canada, 18–21 June 2001; p. 01. [Google Scholar]
- Heverly, M.; Matthews, J.; Lin, J.; Fuller, D.; Maimone, M.; Biesiadecki, J.; Leichty, J. Traverse Performance Characterization for the Mars Science Laboratory Rover. J. Field Robot. 2013, 30, 835–846. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

| Name | Ellery (Rovers) [11] | Soyer (Satellites) [13] |
|---|---|---|
| Large * | Na | >1000 kg † |
| Macro/Medium | >100 kg | 500 kg–1000 kg |
| Mini | 50 kg–100 kg | 100 kg–500 kg |
| Micro | 10 kg–50 kg | 10 kg–100 kg |
| Nano | 5 kg–10 kg | 1 kg–10 kg |
| Pico | Na | 100 g–1 kg |
| Fempto | Na | <100 g |
| Name | Year | Mass (kg) | Outcome | Deployed from |
|---|---|---|---|---|
| Lunokhod 1 | 1970 | 756 [11] | Success | Luna 17 |
| Prop-M (1) | 1971 | 4.5 | Failure | Mars 2 |
| Prop-M (2) | 1971 | 4.5 [11] | Unknown | Mars 3 |
| Lunokhod 2 | 1973 | 840 [11] | Success | Luna 21 |
| Sojourner | 1997 | 10.5 [11] | Success | Pathfinder |
| PLUTO | 2003 | 0.86 [18] | Failure | Beagle 2 |
| MER A | 2004 | 174 [11] | Success | Na |
| MER B | 2004 | 174 [11] | Success | Na |
| MINERVA | 2005 | 0.591 [19] | Failure | Hayabusa 1 |
| MSL | 2012 | 899 [12] | Success | Na |
| Yutu 1 | 2013 | 140 [20] | Success | Chang’e 3 |
| MINERVA II-1A | 2018 | 1.1 [21] | Success | Hayabusa 2 |
| MINERVA II-1B | 2018 | 1.1 [21] | Failure | Hayabusa 2 |
| Yutu 2 | 2019 | 140 [22] | Success | Chang’e 4 |
| Pragyan 1 | 2019 | 27 [23] | Failure | Chandrayaan-2 |
| Mars 2020 | 2021 | 1025 [24] | Success | Na |
| Ingenuity | 2021 | 1.8 [25] | Success | Mars 2020 |
| Zhurong | 2021 | 240 [26] | Success | Tianwen-1 |
| Pragyan 2 | 2023 | 27 [23] | Success | Chandrayaan-3 |
| Rashid | 2023 | 10 [27] | Failure | Hakuto-R Mission 1 |
| Sora-Q (1) | 2023 | 0.25 [27] | Failure | Hakuto-R Mission 1 |
| COLMENA | 2024 | 0.06 [28] | Failure | Peregrine Mission One |
| Iris | 2024 | 2 [29] | Failure | Peregrine Mission One |
| LEV 1 | 2024 | 2.1 [30] | Success | SLIM |
| LEV2 (Sora-Q 2) | 2024 | 0.25 [30] | Success | SLIM |
| Jinchan | 2024 | 5 [31] | Success | Chang’e 6 |
| YAOKI | 2025 | 0.5 [32] | Failure | IM-2 (Athena) |
| Tenacious | 2025 | 5 [33] | Failure | Resilience (Hakuto Mission 2) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chun, C.; Chowdoury, F.; Tanveer, M.H.; Chakravarty, S.; Guerra-Zubiaga, D.A. The Small Frontier: Trends Toward Miniaturization and the Future of Planetary Surface Rovers. Actuators 2025, 14, 356. https://doi.org/10.3390/act14070356
Chun C, Chowdoury F, Tanveer MH, Chakravarty S, Guerra-Zubiaga DA. The Small Frontier: Trends Toward Miniaturization and the Future of Planetary Surface Rovers. Actuators. 2025; 14(7):356. https://doi.org/10.3390/act14070356
Chicago/Turabian StyleChun, Carrington, Faysal Chowdoury, Muhammad Hassan Tanveer, Sumit Chakravarty, and David A. Guerra-Zubiaga. 2025. "The Small Frontier: Trends Toward Miniaturization and the Future of Planetary Surface Rovers" Actuators 14, no. 7: 356. https://doi.org/10.3390/act14070356
APA StyleChun, C., Chowdoury, F., Tanveer, M. H., Chakravarty, S., & Guerra-Zubiaga, D. A. (2025). The Small Frontier: Trends Toward Miniaturization and the Future of Planetary Surface Rovers. Actuators, 14(7), 356. https://doi.org/10.3390/act14070356