
Learning-Based Variable Admittance Control Combined with NMPC for Contact Force Tracking in Unknown Environments

Abstract
1. Introduction
- This study proposes an AC-DDPG-based variable admittance parameter optimization method that enables the online tuning of stiffness and damping parameters in unknown environments.
- It designs a quaternion-based nonlinear model predictive controller to achieve high-precision pose tracking and position tracking with respect to the robot’s end-effector.
- It organically combines these two methods to form a stable constant force–position hybrid control strategy in unknown environments, improving the robustness and accuracy of force–position control in complex scenarios.
2. System Modeling
3. Main Control Strategy
3.1. Online Tuning of Admittance Parameters
3.2. Force–Position Hybrid Control Based on a Quaternion-Based MPC Controller
3.2.1. The Discrete Form of the System-State Equation
3.2.2. Constraints Design
3.2.3. The Optimal Control Problem
4. Experimental Results
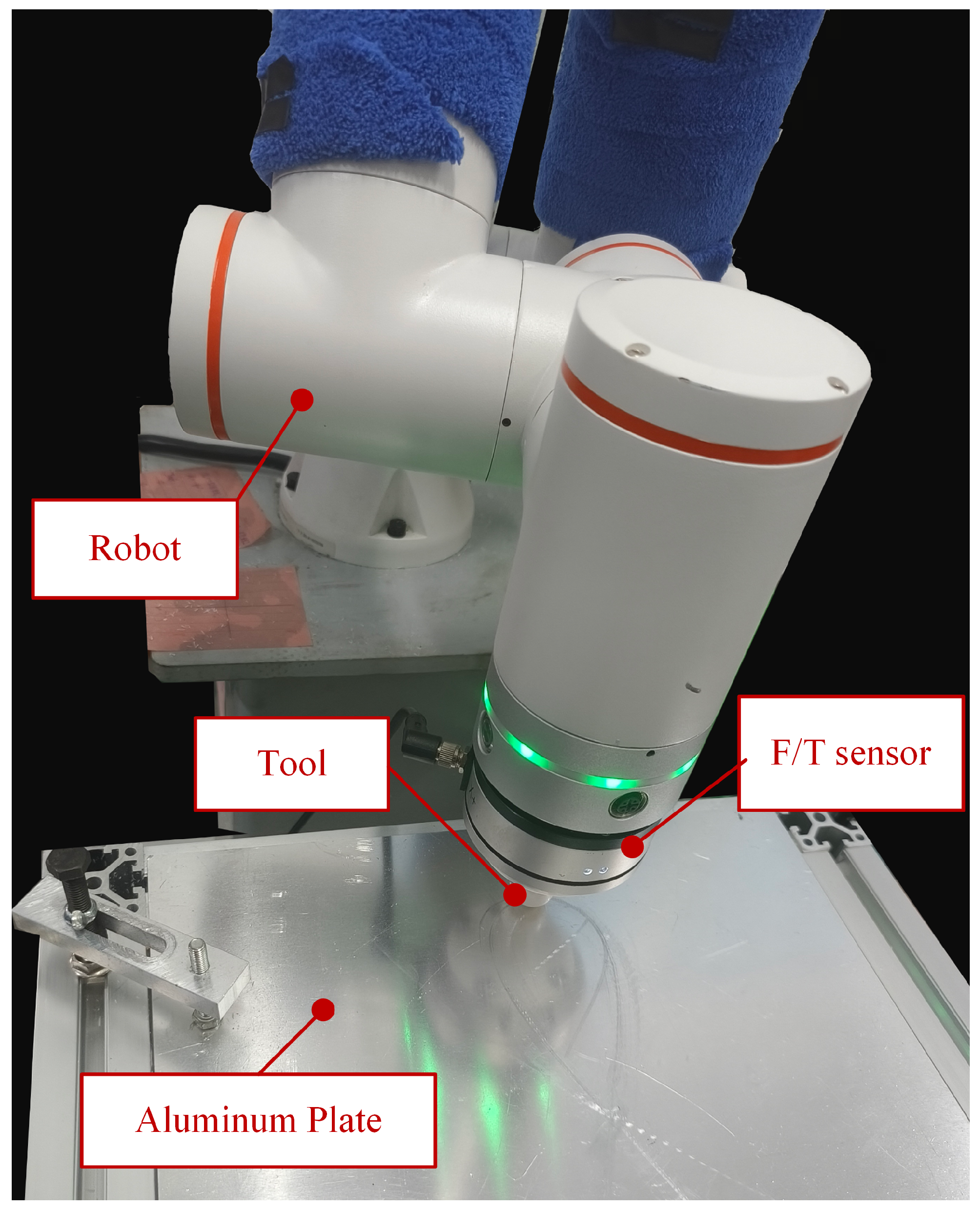
4.1. Experimental Setup
4.1.1. Desired Parameters
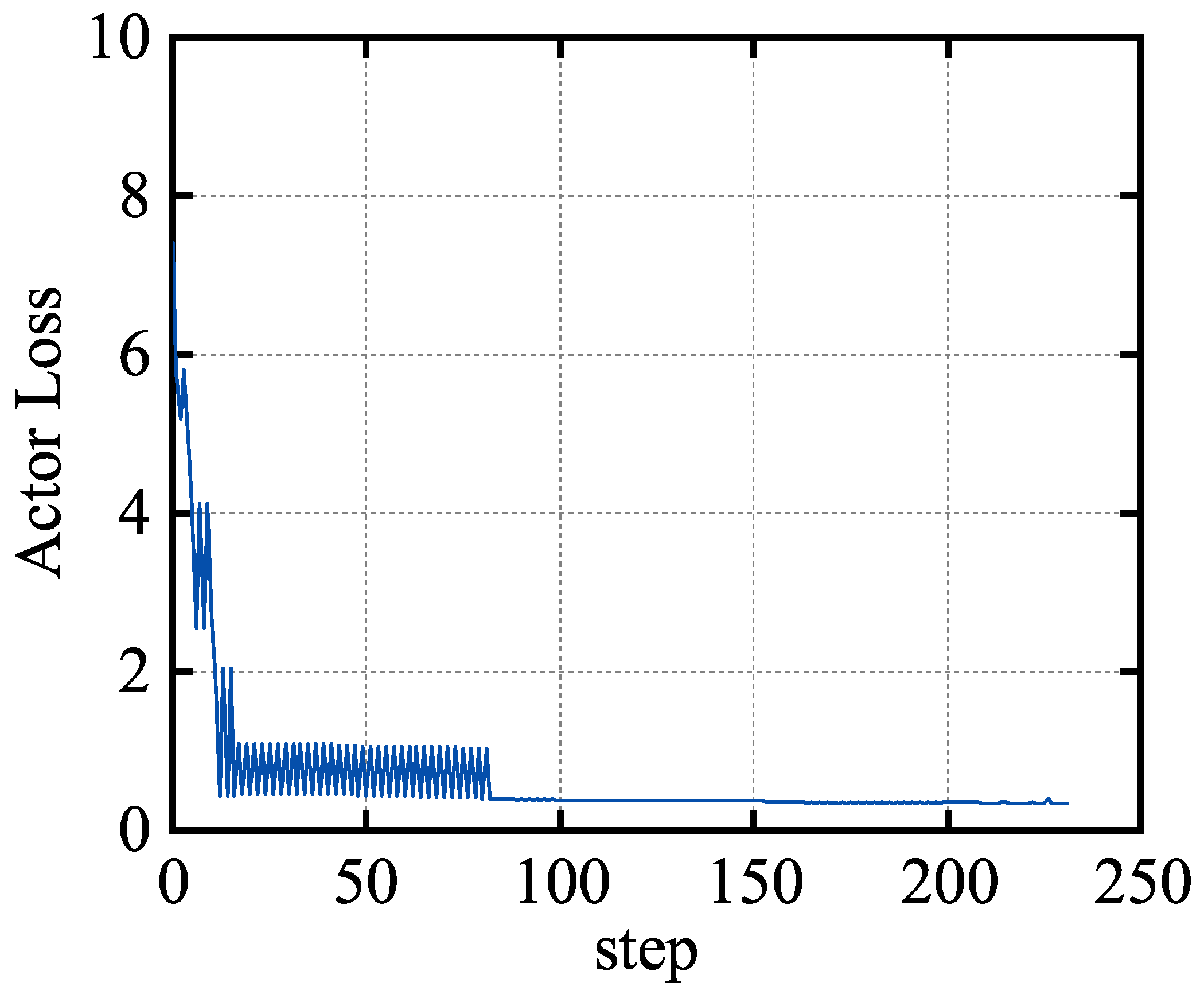
4.1.2. AC-DDPG Parameters
4.1.3. NMPC Parameters
4.2. Experimental Results
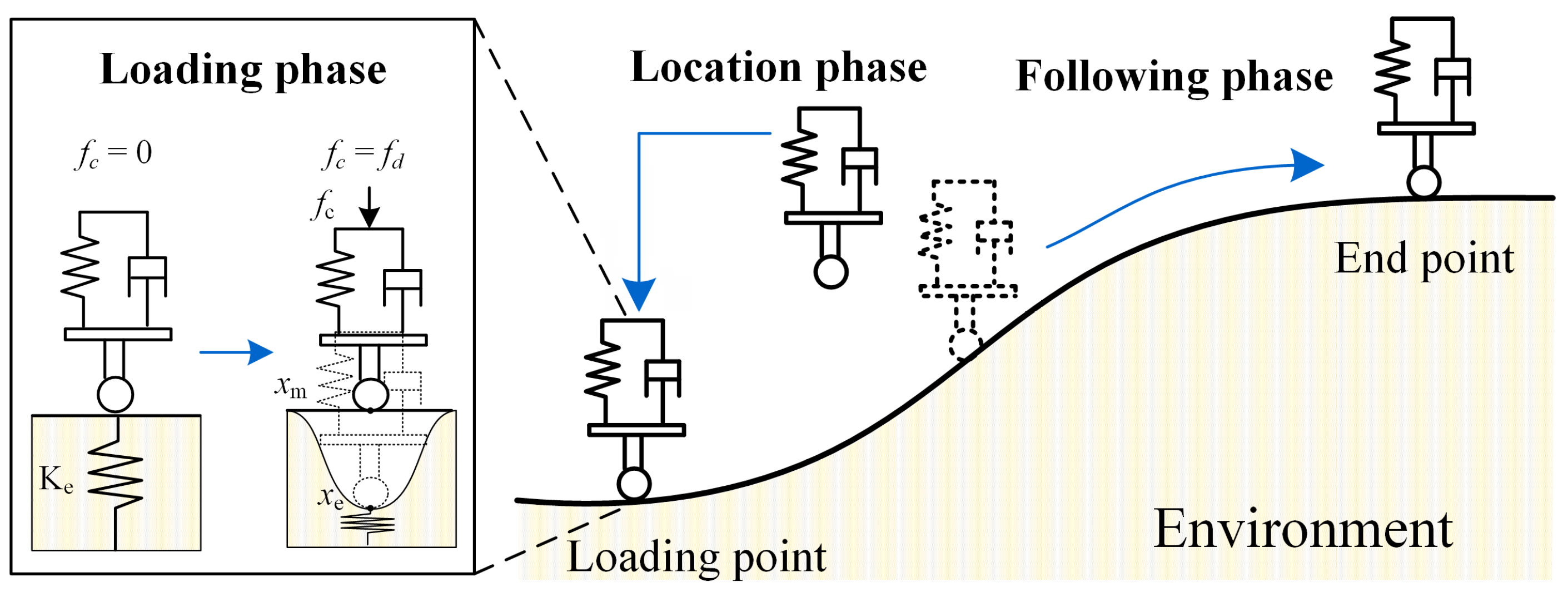
4.2.1. The Point-Loading Experiment
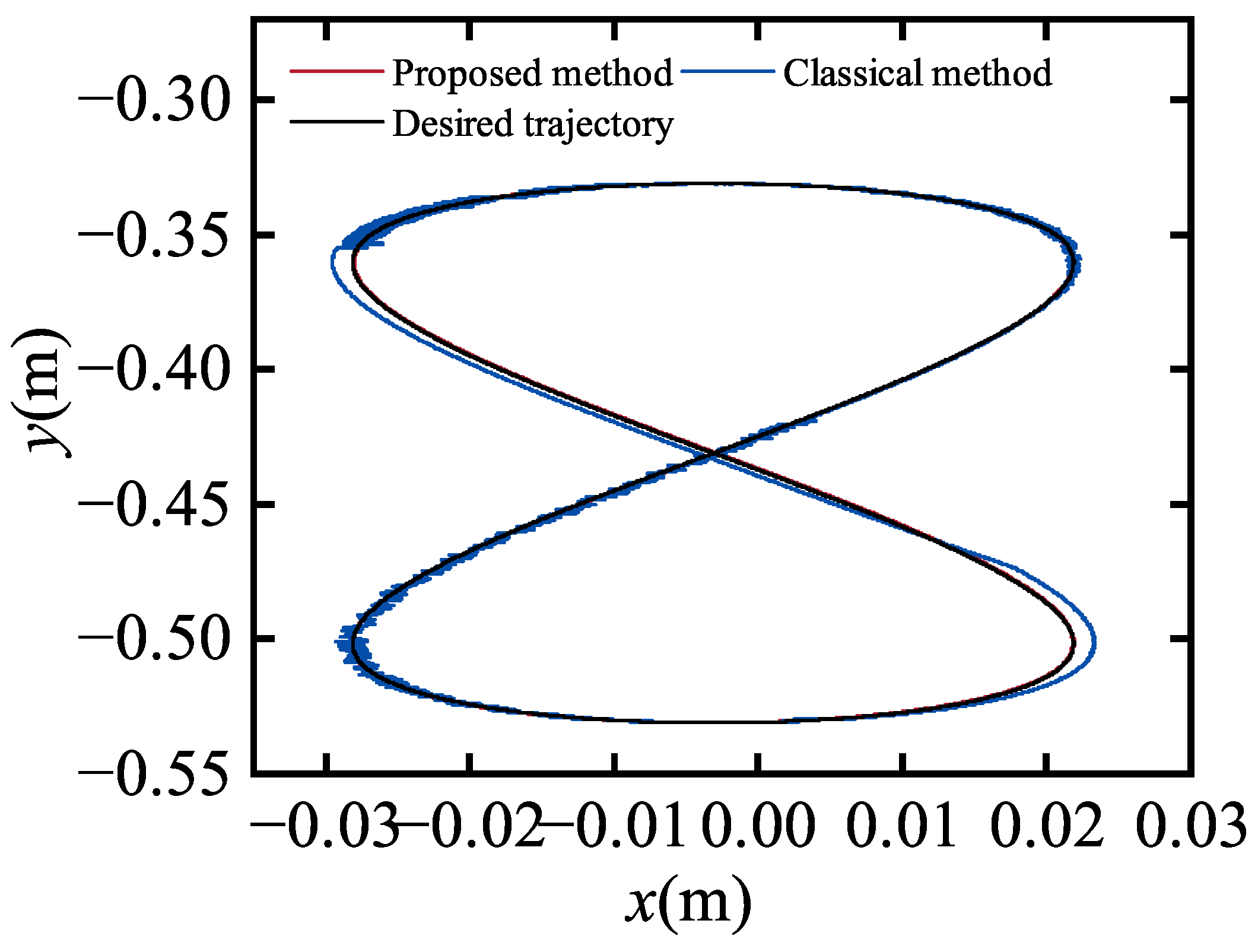
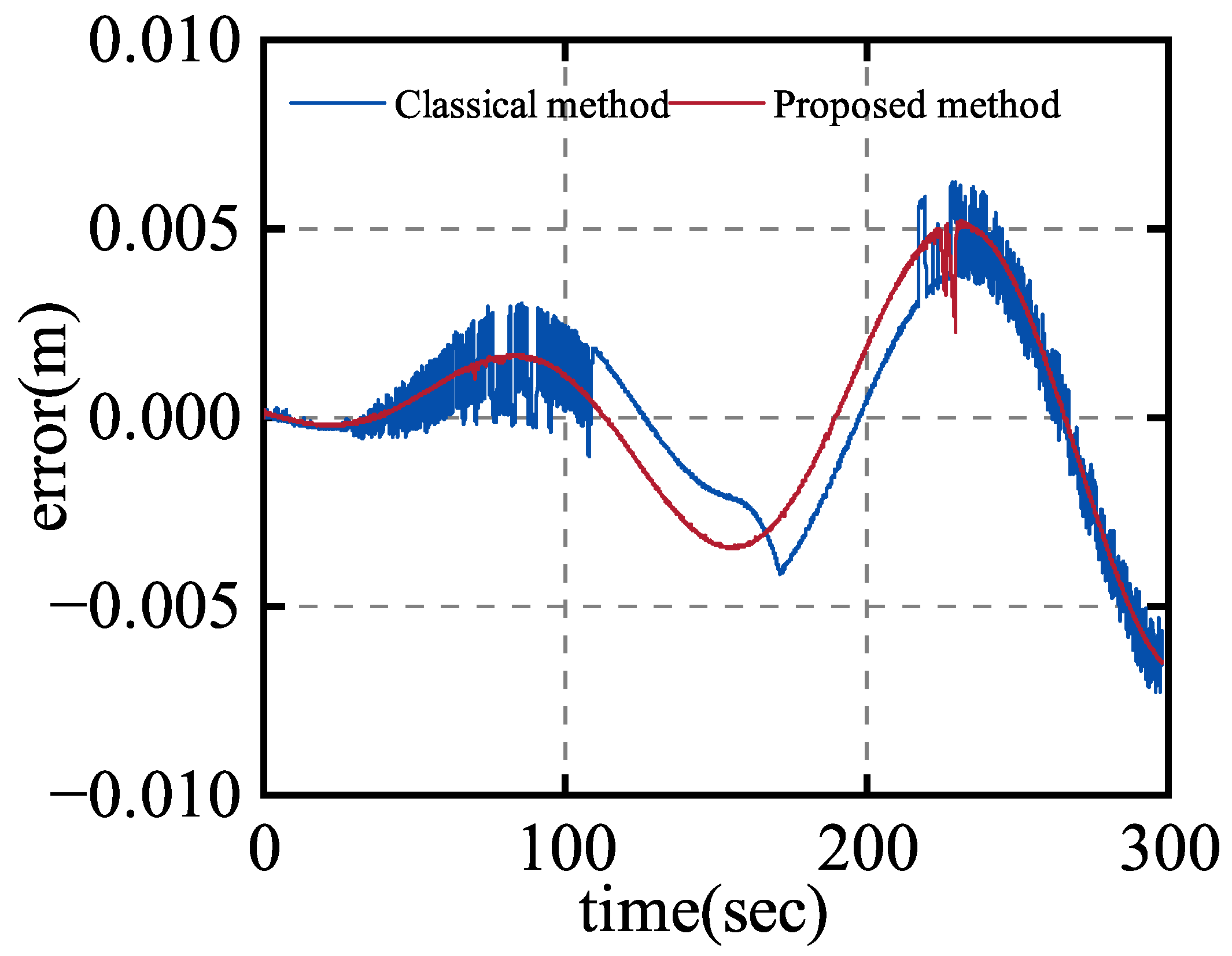
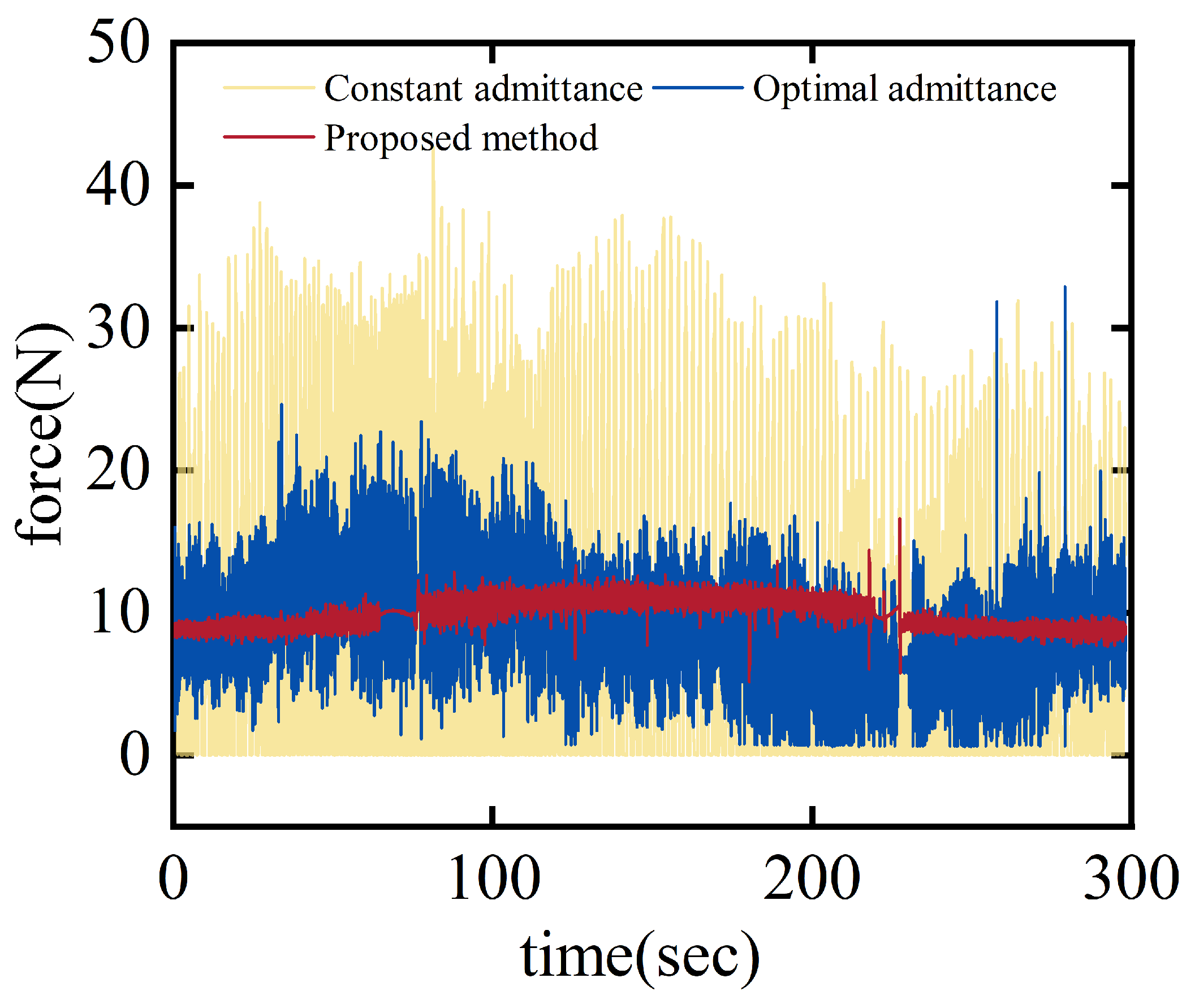
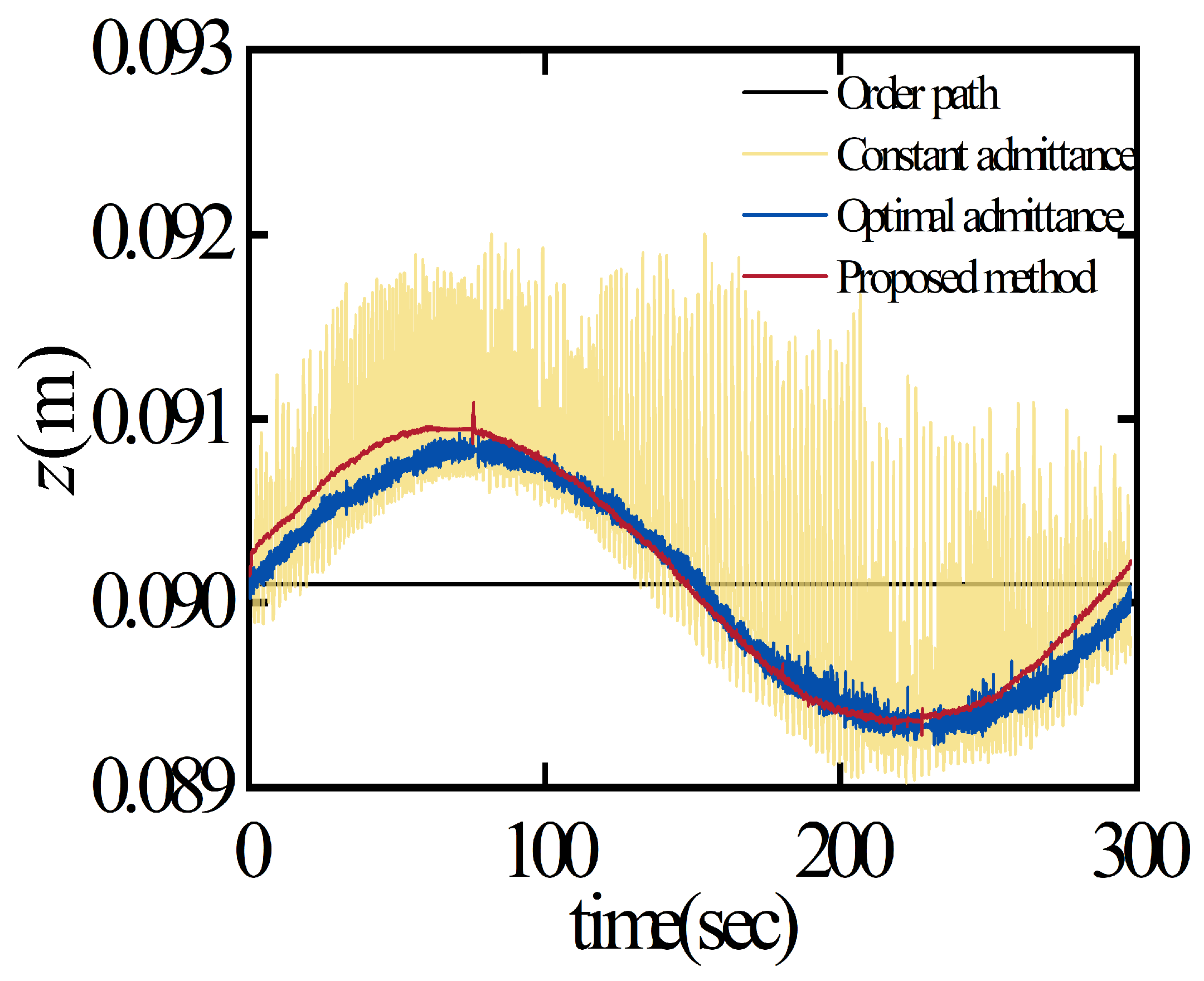
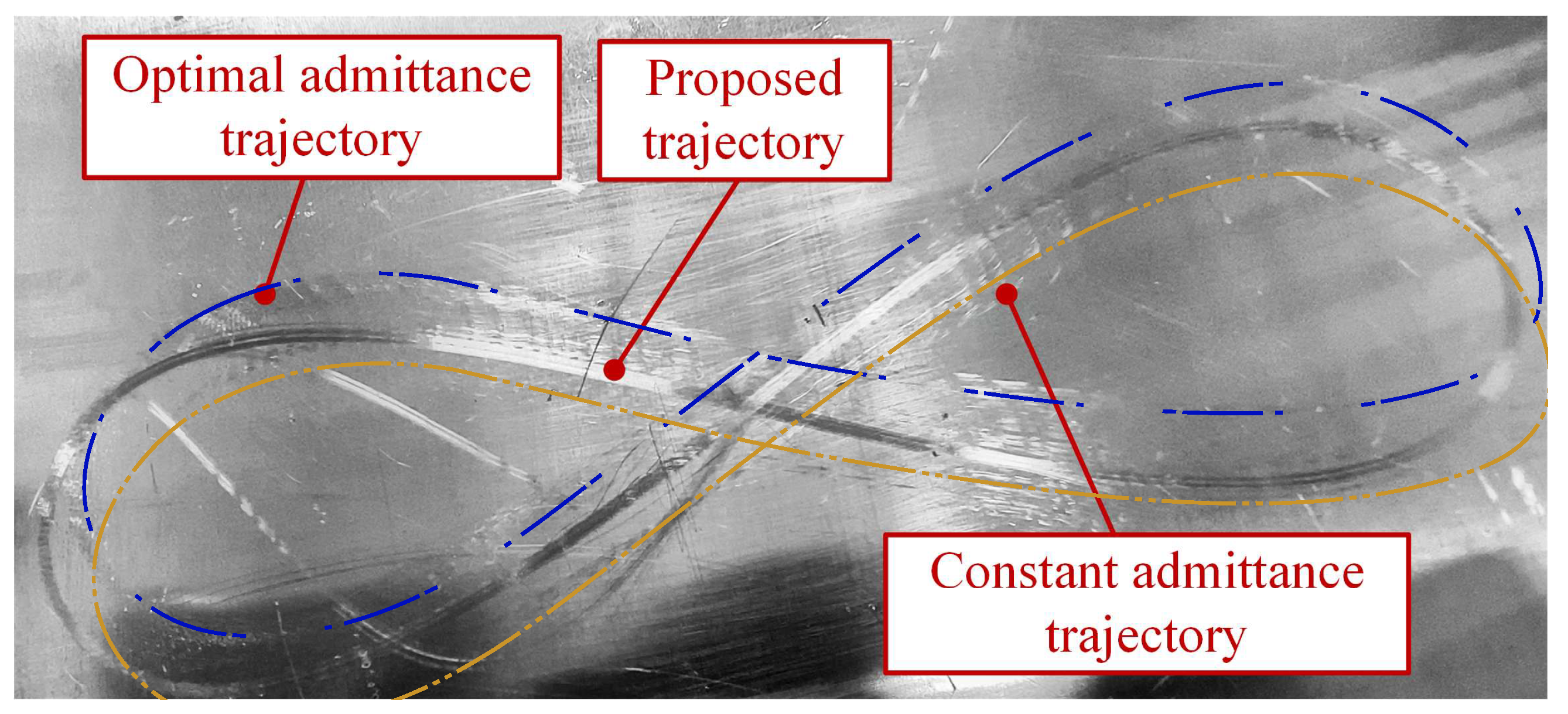
4.2.2. The Tracking Experiment
- Constant admittance control strategy: The parameters are set as K = 35,000 N/m and Ns/m.
- Optimal admittance control strategy: The basic formulation is similar to the diagonal-dominant optimal impedance algorithm proposed in [9], which can be expressed as follows:
- The proposed variable admittance control strategy is based on the AC-DDPG algorithm.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| NMPC | Nonlinear model predictive control |
| DDPG | Deep deterministic policy gradient |
| AC | Actor–critic neural network scheme |
References
- Kozlovsky, S.; Newman, E.; Zacksenhouse, M. Reinforcement learning of impedance policies for peg-in-hole tasks: Role of asymmetric matrices. IEEE Robot. Autom. Lett. 2022, 7, 10898–10905. [Google Scholar] [CrossRef]
- Hogan, N. Impedance Control: An Approach to Manipulation. In Proceedings of the 1984 American Control Conference, San Diego, CA, USA, 6–8 June 1984; pp. 304–313. [Google Scholar] [CrossRef]
- Albu-Schaffer, A. Cartesian impedance control of redundant robots: Recent results with the DLR-light-weight-arms. In Proceedings of the IEEE International Conference on Intelligent Robots & Systems, Las Vegas, NV, USA, 27 October–1 November 2003. [Google Scholar]
- Buchli, J.; Stulp, F.; Theodorou, E.; Schaal, S. Learning variable impedance control. Int. J. Robot. Res. 2011, 30, 820–833. [Google Scholar] [CrossRef]
- Bednarczyk, M.; Omran, H.; Bayle, B. Model Predictive Impedance Control. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation ICRA, Paris, France, 31 May–31 August 2020; pp. 4702–4708. [Google Scholar] [CrossRef]
- Wahrburg, A.; Listmann, K. MPC-based Admittance Control for Robotic Manipulators. In Proceedings of the 55th IEEE Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 7548–7554. [Google Scholar]
- Jin, Z.; Qin, D.; Liu, A.; Zhang, W.A.; Yu, L. Model Predictive Variable Impedance Control of Manipulators for Adaptive Precision-Compliance Tradeoff. IEEE-ASME Trans. Mechatron. 2023, 28, 1174–1186. [Google Scholar] [CrossRef]
- Angelini, F.; Xin, G.; Wolfslag, W.J.; Tiseo, C.; Mistry, M.; Garabini, M.; Bicchi, A.; Vijayakumar, S. Online Optimal Impedance Planning for Legged Robots. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 6028–6035. [Google Scholar] [CrossRef]
- Pollayil, M.J.; Angelini, F.; Xin, G.; Mistry, M.; Vijayakumar, S.; Bicchi, A.; Garabini, M. Choosing Stiffness and Damping for Optimal Impedance Planning. IEEE Trans. Robot. 2023, 39, 1281–1300. [Google Scholar] [CrossRef]
- Kikuuwe, R. Sliding-Mode-Like Position Controller for Admittance Control with Bounded Actuator Force. IEEE-ASME Trans. Mechatron. 2014, 19, 1489–1500. [Google Scholar] [CrossRef]
- Gao, H.; Ma, C.; Zhang, X.; Zhou, C. Compliant variable admittance adaptive fixed-time sliding mode control for trajectory tracking of robotic manipulators. Robotica 2024, 42, 1731–1760. [Google Scholar] [CrossRef]
- dos Santos, W.M.; Siqueira, A.A. Optimal impedance via model predictive control for robot-aided rehabilitation. Control Eng. Pract. 2019, 93, 104177. [Google Scholar] [CrossRef]
- Cao, R.; Cheng, L.; Li, H. Passive Model-Predictive Impedance Control for Safe Physical Human–Robot Interaction. IEEE Trans. Cogn. Dev. Syst. 2023, 16, 426–435. [Google Scholar] [CrossRef]
- Keemink, A.Q.L.; van der Kooij, H.; Stienen, A.H.A. Admittance control for physical human-robot interaction. Int. J. Robot. Res. 2018, 37, 1421–1444. [Google Scholar] [CrossRef]
- Yao, B.; Zhou, Z.; Wang, L.; Xu, W.; Liu, Q.; Liu, A. Sensorless and adaptive admittance control of industrial robot in physical human-robot interaction. Robot. Comput.-Integr. Manuf. 2018, 51, 158–168. [Google Scholar] [CrossRef]
- Haninger, K.; Hegeler, C.; Peternel, L. Model predictive impedance control with Gaussian processes for human and environment interaction. Robot. Auton. Syst. 2023, 165, 104431. [Google Scholar] [CrossRef]
- Li, Z.; Wei, H.; Zhang, H.; Liu, C. A Variable Admittance Control Strategy for Stable and Compliant Human-Robot Physical Interaction. IEEE Robot. Autom. Lett. 2025, 10, 1138–1145. [Google Scholar] [CrossRef]
- Guler, B.; Niaz, P.P.; Madani, A.; Aydin, Y.; Basdogan, C. An adaptive admittance controller for collaborative drilling with a robot based on subtask classification via deep learning. Mechatronics 2022, 86, 102851. [Google Scholar] [CrossRef]
- Tahamipour-Z, S.M.; Mattila, J. Distributed impedance control of coordinated dissimilar upper-limb exoskeleton arms. Control Eng. Pract. 2024, 142, 105753. [Google Scholar] [CrossRef]
- Naceri, A.; Schumacher, T.; Li, Q.; Calinon, S.; Ritter, H. Learning optimal impedance control during complex 3D arm movements. IEEE Robot. Autom. Lett. 2021, 6, 1248–1255. [Google Scholar] [CrossRef]
- Ducaju, J.M.S.; Olofsson, B.; Johansson, R. Model-Based Predictive Impedance Variation for Obstacle Avoidance in Safe Human–Robot Collaboration. IEEE Trans. Autom. Sci. Eng. 2024, 22, 9571–9583. [Google Scholar] [CrossRef]
- Jinjun, D.; Yahui, G.; Ming, C.; Xianzhong, D. Adaptive variable impedance control for dynamic contact force tracking in uncertain environment. Robot. Auton. Syst. 2018, 102, 54–65. [Google Scholar] [CrossRef]
- Ning, G.; Liang, H.; Zhang, X.; Liao, H. Inverse-reinforcement-learning-based robotic ultrasound active compliance control in uncertain environments. IEEE Trans. Ind. Electron. 2023, 71, 1686–1696. [Google Scholar] [CrossRef]
- Li, Y.; Yang, C.; Yan, W.; Cui, R.; Annamalai, A. Admittance-Based Adaptive Cooperative Control for Multiple Manipulators with Output Constraints. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3621–3632. [Google Scholar] [CrossRef]
- Li, Y.; Zheng, L.; Wang, Y.; Dong, E.; Zhang, S. Impedance Learning-Based Adaptive Force Tracking for Robot on Unknown Terrains. IEEE Trans. Robot. 2025, 41, 1404–1420. [Google Scholar] [CrossRef]
- Gold, T.; Völz, A.; Graichen, K. Model predictive interaction control for robotic manipulation tasks. IEEE Trans. Robot. 2022, 39, 76–89. [Google Scholar] [CrossRef]
- Minniti, M.V.; Grandia, R.; Fäh, K.; Farshidian, F.; Hutter, M. Model predictive robot-environment interaction control for mobile manipulation tasks. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May 30–5 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1651–1657. [Google Scholar]
- Han, S.W.; Iskandar, M.; Lee, J.; Kim, M.J. Online multi-contact feedback model predictive control for interactive robotic tasks. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 11556–11562. [Google Scholar]
- Peng, G.; Chen, C.P.; Yang, C. Neural networks enhanced optimal admittance control of robot–environment interaction using reinforcement learning. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 4551–4561. [Google Scholar] [CrossRef] [PubMed]
- Pozzi, A.; Incremona, A.; Toti, D. Neural Network-Based Imitation Learning for Approximating Stochastic Battery Management Systems. IEEE Access 2025, 13, 71041–71052. [Google Scholar] [CrossRef]
- Beeson, P.; Ames, B. TRAC-IK: An open-source library for improved solving of generic inverse kinematics. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Republic of Korea, 3–5 November 2015; pp. 928–935. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| x-Proposed | y-Proposed | x-Classical | y-Classical | |
|---|---|---|---|---|
| RMSE | 0.0026216 m | 0.0025137 m | 0.0051176 m | 0.0051035 m |
| variance | 6.8637 × 10−6 m | 6.3175 × 10−6 m | 2.6134 × 10−5 m | 2.5993 × 10−5 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Yao, J.; Qian, C. Learning-Based Variable Admittance Control Combined with NMPC for Contact Force Tracking in Unknown Environments. Actuators 2025, 14, 323. https://doi.org/10.3390/act14070323
Zhang Y, Yao J, Qian C. Learning-Based Variable Admittance Control Combined with NMPC for Contact Force Tracking in Unknown Environments. Actuators. 2025; 14(7):323. https://doi.org/10.3390/act14070323
Chicago/Turabian StyleZhang, Yikun, Jianjun Yao, and Chen Qian. 2025. "Learning-Based Variable Admittance Control Combined with NMPC for Contact Force Tracking in Unknown Environments" Actuators 14, no. 7: 323. https://doi.org/10.3390/act14070323
APA StyleZhang, Y., Yao, J., & Qian, C. (2025). Learning-Based Variable Admittance Control Combined with NMPC for Contact Force Tracking in Unknown Environments. Actuators, 14(7), 323. https://doi.org/10.3390/act14070323