4.1. Variable Section Hydrofoil Performance Studies
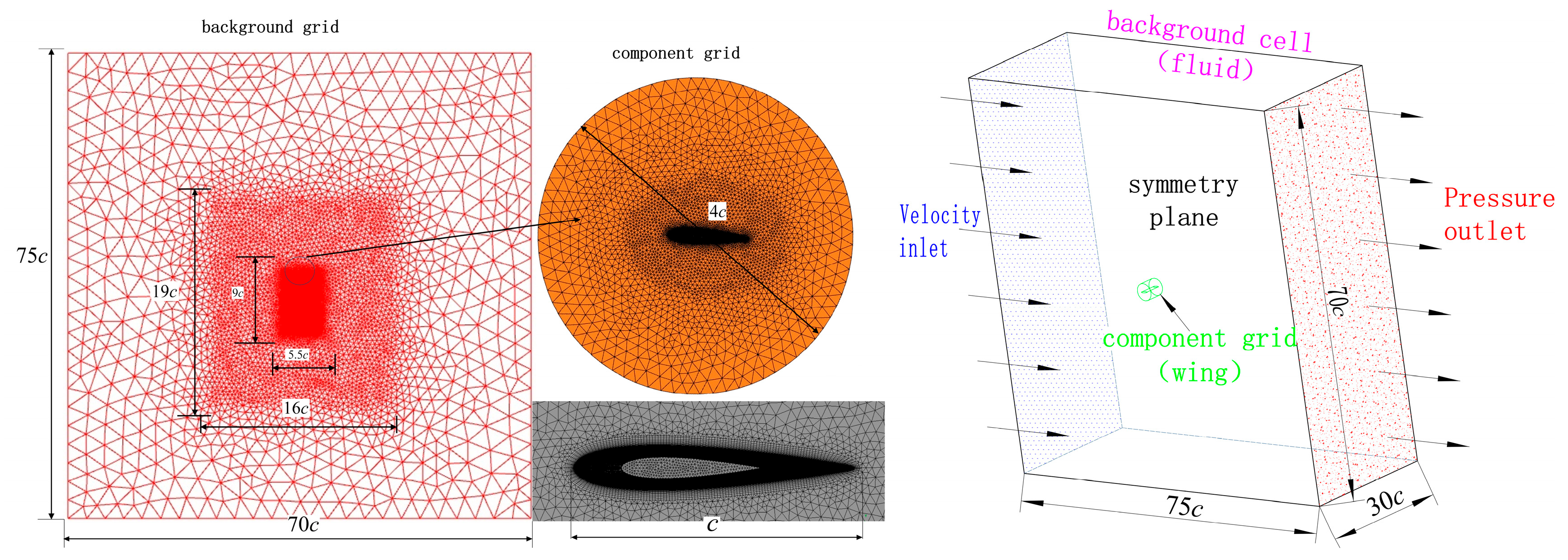
Due to the slight difference in the volume of the hydrofoils of different cross-sections, the number of meshes is not the same, and the results of the dividing the component meshes are shown in
Table 7. The parameters of the calculation model are
,
,
.
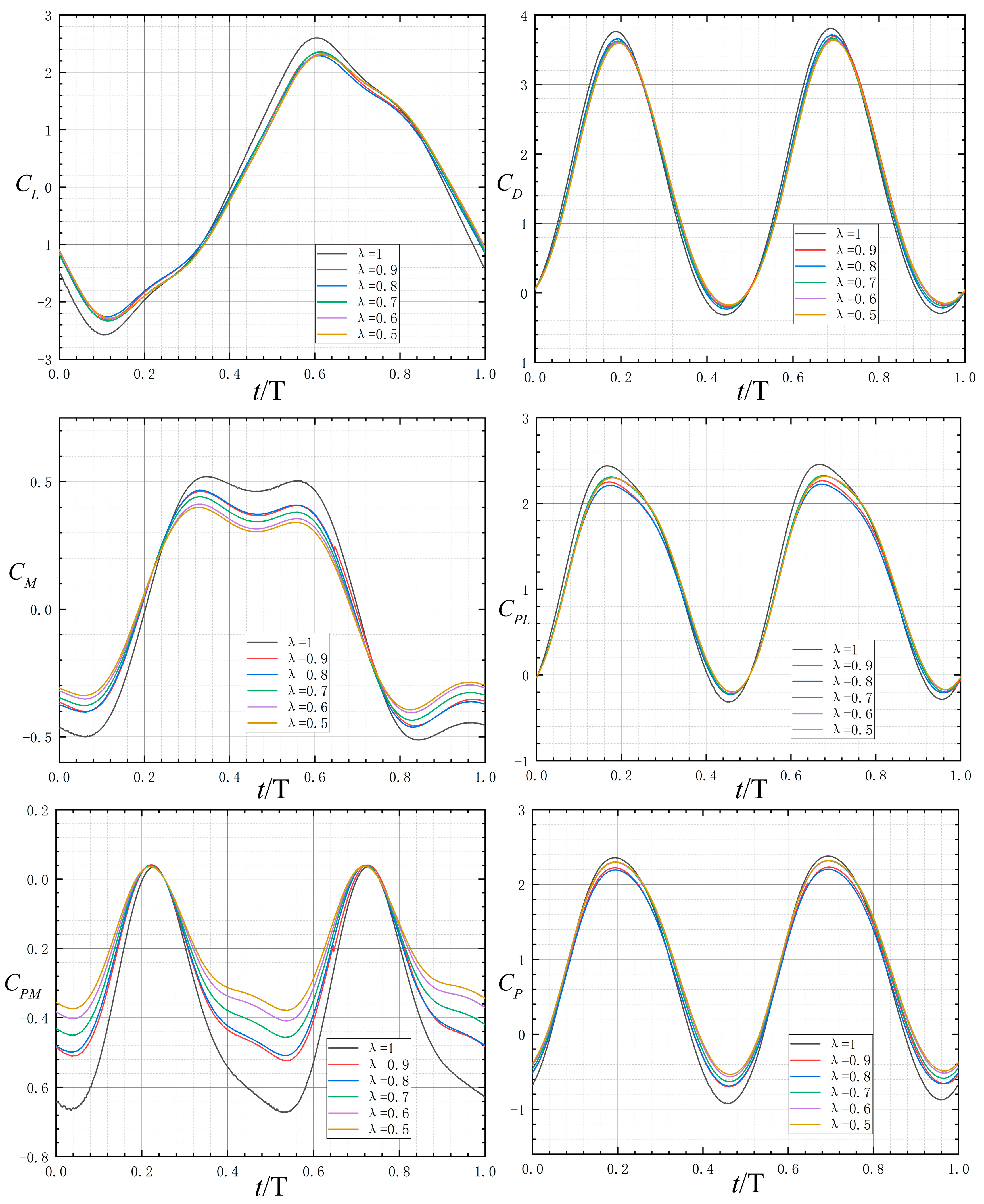
Figure 5 shows the coefficient curves of hydrofoils with different cross-sections. As can be seen from
Figure 5, with the decrease in coefficient λ, the overall trend of the coefficient curves of the six hydrofoil models is consistent. The instantaneous lift coefficient
and the instantaneous moment coefficient
are reduced more obviously when the value of
is reduced from 1.0 to 0.9 at the time period of 0.4–0.7 T (i.e., near the horizontal position of the hydrofoil sinking to the horizontal position). The cross-sectional coefficient
continues to be reduced subsequently, which has a small effect on the coefficient curves. The effect of decreasing the cross-sectional coefficient
on the drag coefficient
is mainly reflected in the peak reduction.
Table 8 shows the comparison of coefficients for hydrofoils with different cross-section parameters. Compared with the hydrofoil with
the hydrofoil with
has a peak lift coefficient
decreased by 11.4%, the peak moment coefficient
decreased by 23.1%, the maximum drag
decreased by 9.3%, and the average power coefficient
increased by 17.4%.
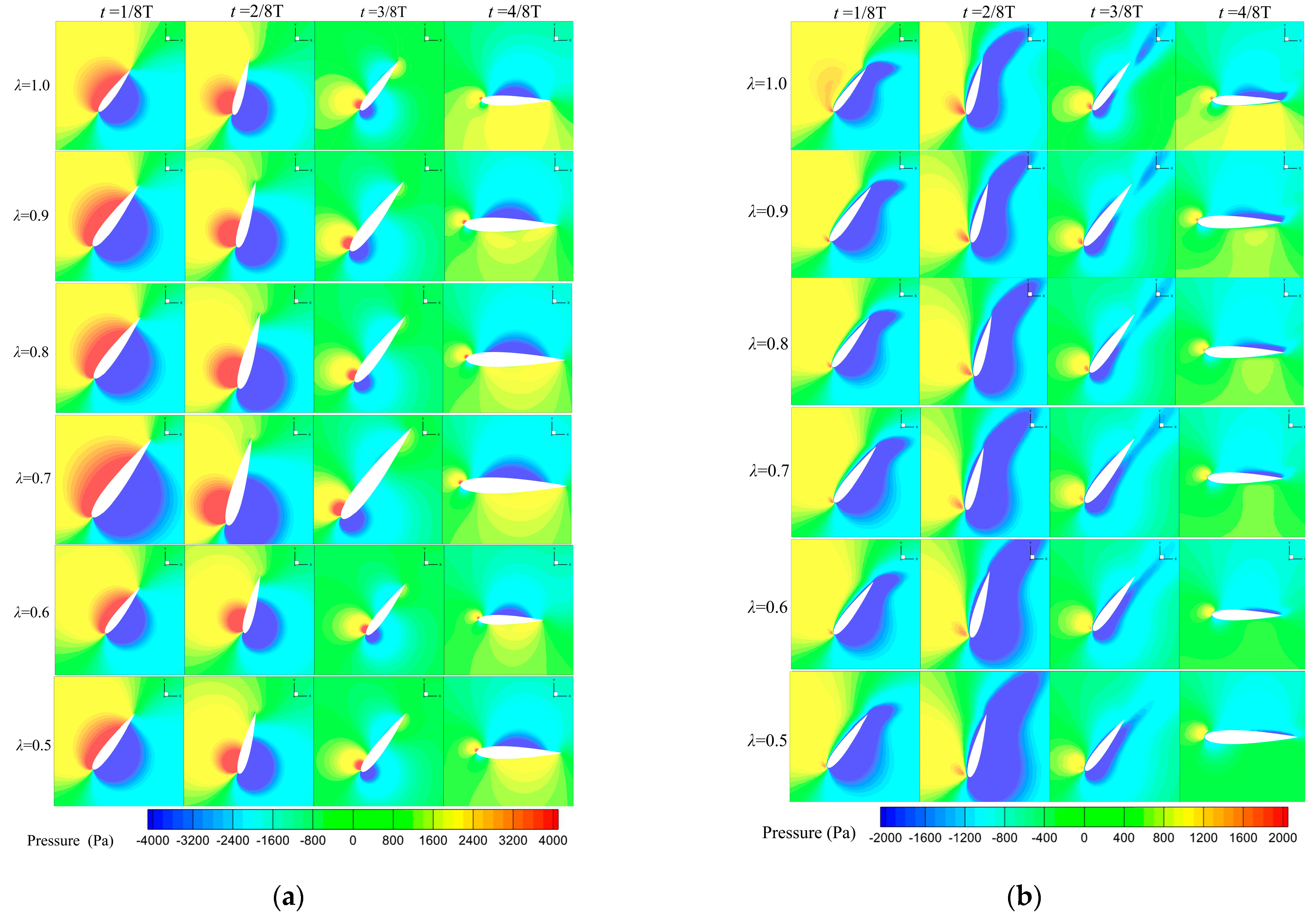
Figure 6 shows the static pressure of hydrofoils with different cross-sections in a cloud diagram, which can be seen from
Figure 6a. The pressure distribution at
m is the same for each model, which are roughly semicircular.
This suggests that the largest difference in hydrodynamic performance around variable section hydrofoils compared to fixed-section hydrofoils is in the reduction in pitching moments, which is the main reason for the increased energy capture efficiency. This is different from previous studies about adding end plates, flexible hydrofoils, and adding trailing edges.
The hydrofoil moves from 1/8 T to 4/8 T, the high-pressure center on the upper surface gradually moves forward, the pressure at the trailing edge of the hydrofoil decreases, and the negative pressure center on the lower surface gradually decreases, and then gradually changes to a positive pressure state. From
Figure 6b, it can be seen that during the downward movement of the hydrofoil, the low-pressure region appears near the upper surface at the cross-section z = 0.6 m, the low-pressure region on the lower surface of the hydrofoil is in the shape of a number “6”, and the low-pressure center near the wall decreases significantly with the decrease of
and approaches to the pitching axis of the hydrofoil. Combined with the hydrofoil power calculation formula, it can be seen that in one motion cycle, the direction of the lift force of the hydrofoil is the same as the direction of the velocity, the work performed by the lift force is positive, the direction of the moment is opposite to the direction of the hydrofoil rotating around the axis, and the work performed by the moment is negative. It can be seen in
Figure 6 that, compared to the other time periods, the moment of the hydrofoil is larger when it is close to the pole, the power of the moment
is higher, and the reduction in the hydrofoil cross-section has a more obvious effect on the power of the moment
. The effect of the reduced hydrofoil cross-section on the moment power
is more obvious. The decrease in moment power in this motion phase is larger than the decrease in lift and sink power, resulting in a higher average power coefficient of the hydrofoil and a lower average power coefficient change.
Compared to the hydrofoil with
increases the average power coefficient by about 5%, and a decrease in
from 0.6 to 0.5 increases the average power coefficient by 2.38%. As the cross-sectional coefficient
decreases, the pressure center on the hydrofoil surface moves, with the high-pressure part concentrating more in the middle when
is small. This change affects lift and drag forces, and over-concentration may increase drag and reduce net power. Regarding tip vortex dynamics,
reduction shifts vortex shedding backward and increases tip vortex size and intensity, leading to more energy loss. In terms of energy extraction efficiency, while the reduction in pitching moment initially boosts the average power coefficient, the negative impacts of pressure distribution and tip vortex changes, like increased drag and vortex-related losses, gradually prevail. Consequently, the overall enhancement of the average power coefficient weakens as
continues to decrease.
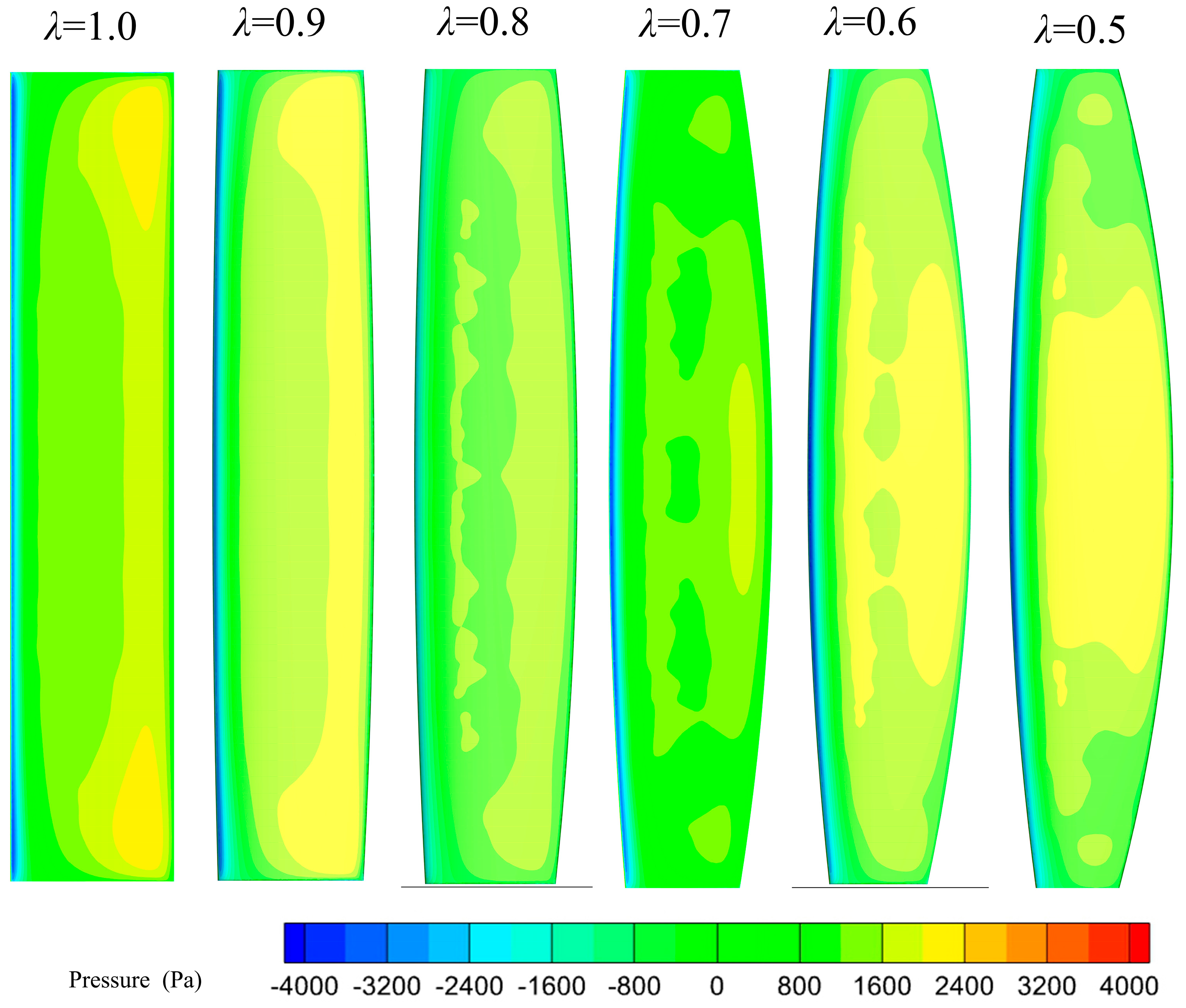
Figure 7 shows the distribution of static pressure on the upper surface of the hydrofoil at
t = 0.5 T. When
, the wing end effect has a large influence, the pressure center is mainly distributed in the trailing edge of the hydrofoil and the tip portion of the hydrofoil, and the middle portion of the hydrofoil has a smaller pressure. With the decrease of
, the pressure center on the surface of the hydrofoil is gradually divided. There are multiple high-pressure clusters, and the pressure center is gradually close to the leading edge and the middle.
0.8 and 0.7 have a small influence on the wing end effect. When
, the high-pressure part is mainly distributed in the middle part of the hydrofoil, and the stability of the hydrofoil motion becomes worse instead.
Variable section hydrofoils can reduce the inertia of the tidal current power generation device and improve the overall efficiency of the device by improving the energy acquisition efficiency while reducing the self-weight. The reduction in pitching moment and the improvement of pressure distribution on the surface of the hydrofoils can improve the stability of the power generation device and prolong the working life, which are of significance in the research and development of the design of the power generation device.
Figure 8 shows the vortex contours at
m of the hydrofoil cross-section. From
Figure 8, the vortex shapes of the three hydrofoil models with
1.0, 0.9, and 0.5 are roughly the same at all moments, and the intensity of the vortex is slightly reduced as the value of
decreases. There is no obvious vortex shedding phenomenon on the upper and lower surfaces of the hydrofoils at the cross-section of
0.0 m. There is no dynamic stall phenomenon, and the hydrofoils are subjected to the hydrofoil is subjected to the same water flow.
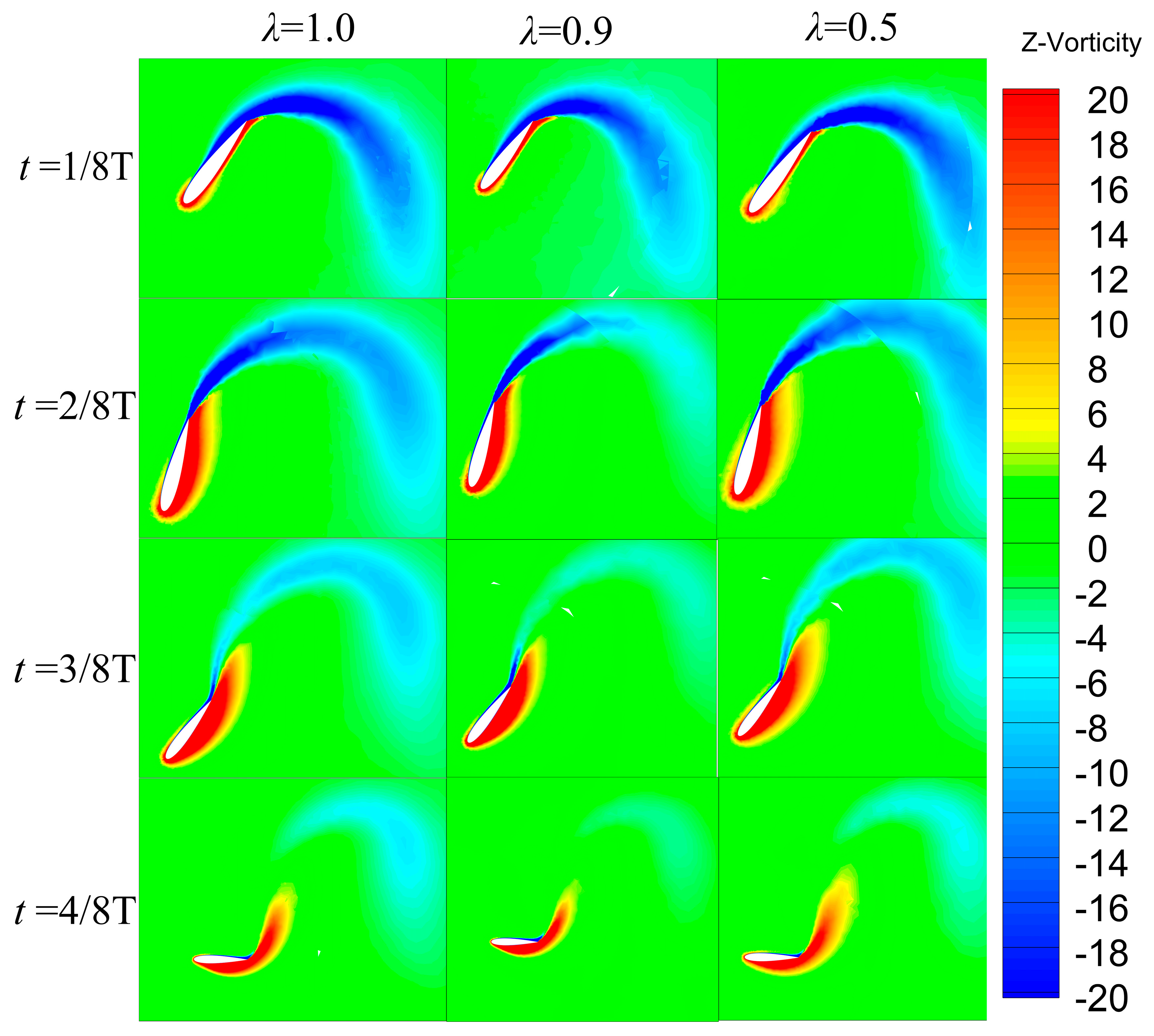
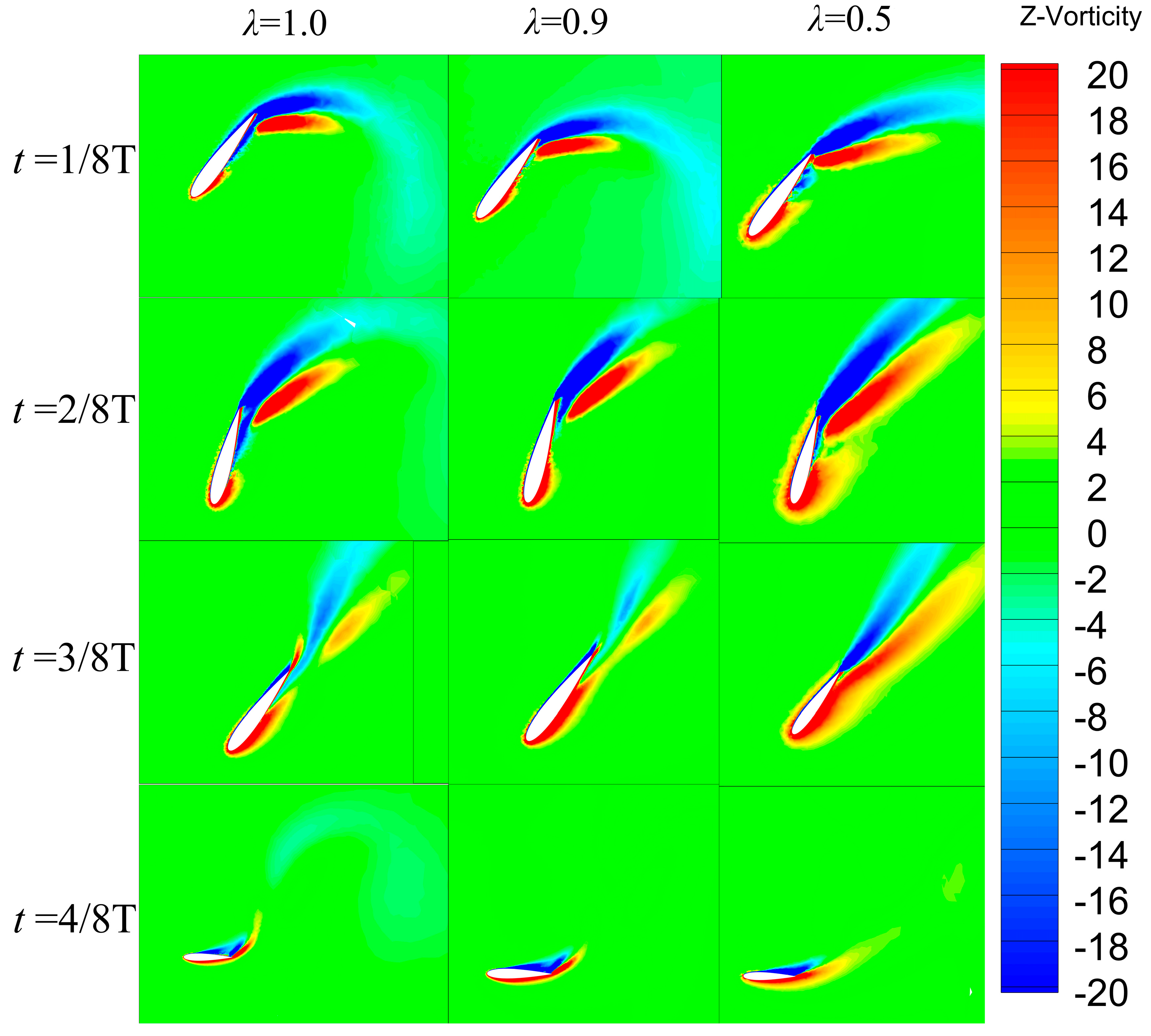
Figure 9 shows the vortex contours at
0.6 m of the hydrofoil cross-section, and
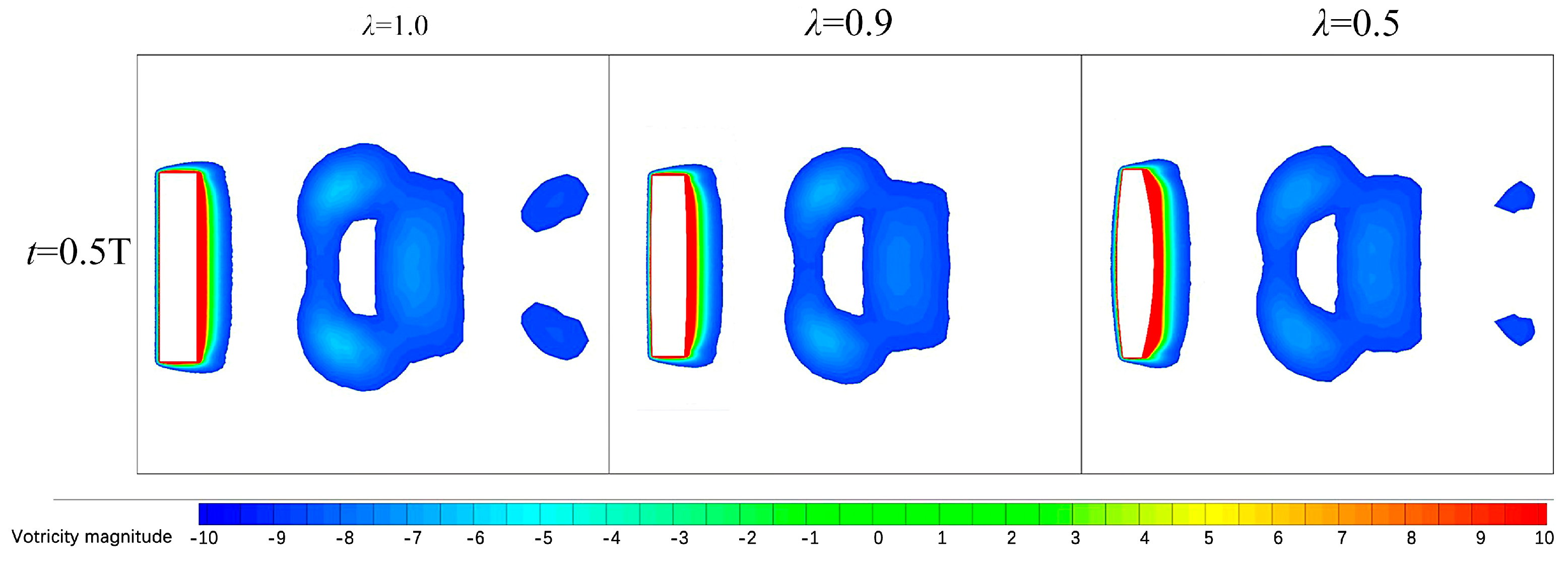
Figure 10 shows the wake vortex contours of the hydrofoil at the moment of
t = 0.5 T. From
Figure 9, it can be seen that the vortex of the hydrofoil model at
1.0 is shed along the hydrofoil wall, and as
decreases, the location of vortex shedding is gradually shifted backward. The three types of hydrofoils produce many tiny vortex quantities in the tips of the hydrofoils at the stage of 1/8 T to 2/8 T, and the hydrofoil wall is more prone to produce boundary separation with the increase of
. When the vortex produced by the boundary layer separation is separated from the hydrofoil wall, the transient lift decreases, so the transient lift generated from 1/8 T to 2/8 T stage decreases. From the 1/8 T to 2/8 T stage, the hydrofoil model with
0.5 produces much larger vortex at the tip of the wing than the hydrofoil models with
1.0 and 0.9. From the vortex distribution in
Figure 10, the hydrofoil cross-section decreases, the intensity of the vortex at the tail of the hydrofoil decreases slightly, and the wake vortex produced by the hydrofoil with
0.9 is smaller compared with that of
0.5. Therefore, it can be speculated that the reduction in hydrofoil cross-section reduces the tip flow and the vortex strength, reduces the hydrofoil instantaneous lifted by a small amount, and reduces the moment significantly, while too small a cross-section parameter will cause the hydrofoil to produce a larger vortex shedding, which will make the pressure overly concentrated and reduce the stability of the hydrofoil motion.
4.2. Effect of Different Dimensionless Reduced Frequencies on Hydrofoil Performance
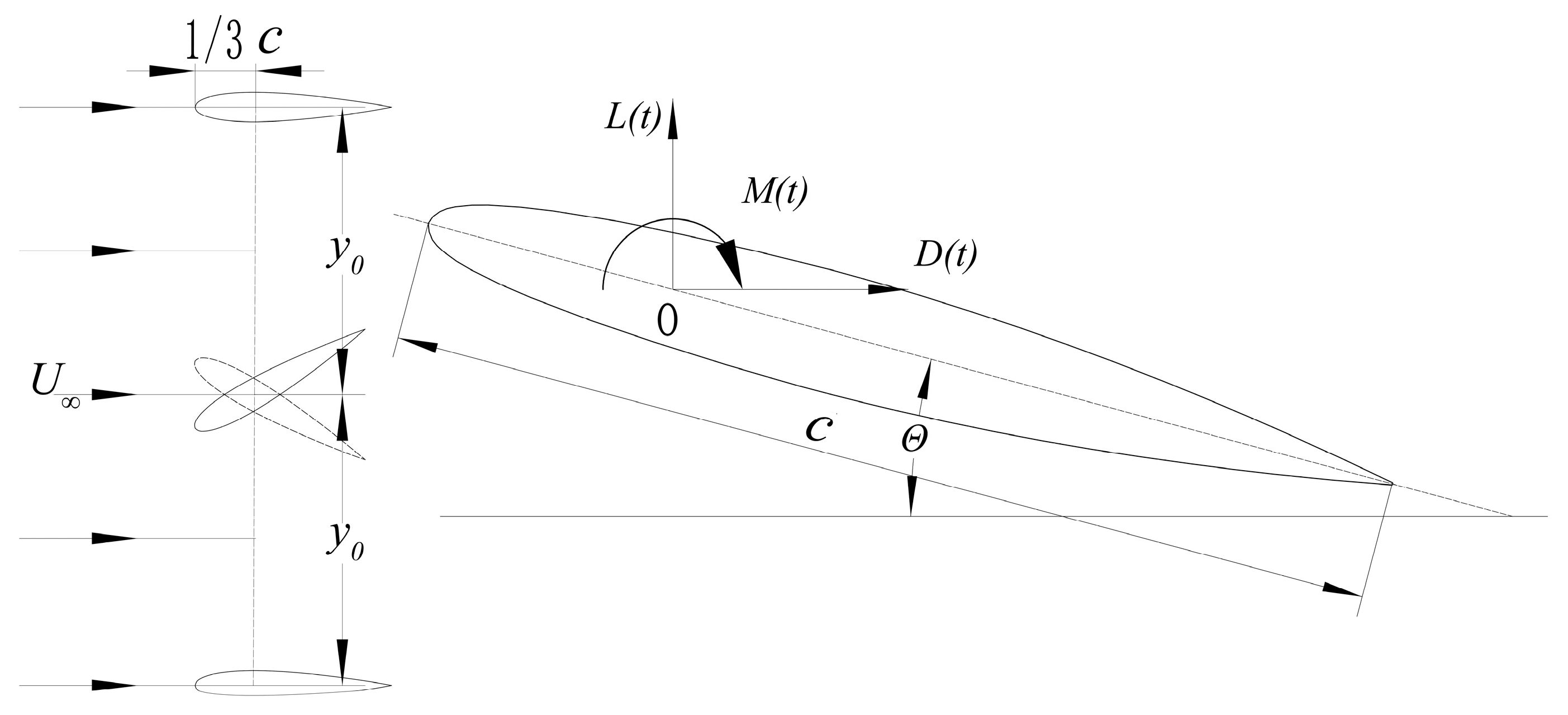
In the process of hydrofoil motion, the angle of attack of the hydrofoil relative to the direction of the incoming flow has an important effect on the force on the hydrofoil. As the hydrofoil force is decomposed into the drag force parallel to the direction of incoming flow, the moment of rotation around the axis and the lift force perpendicular to the direction of incoming flow, the instantaneous effective angle of attack of the hydrofoil is not the pitch angle, and the effective angle of attack of the hydrofoil at this point in time is calculated by the following formula [
32]:
Hydrofoil lifting and sinking motion of the speed difference is not large, cannot be ignored, at this time the hydrofoil’s equivalent incoming velocity for the water velocity and lifting and sinking speed of the synthesis, the equivalent incoming velocity is defined as follows [
10]:
In the non-constant flow, it is not convenient to determine the relationship between the hydrodynamic performance of the hydrofoil and the angle of attack by the available experimental data. From the above, it is known that reducing the cross-section parameter λ can appropriately increase the average power, but continuing to reduce λ will reduce the stability of the hydrofoil movement frequency. Then, we try to select the variable cross-section airfoil with
0.5, the lift and sinking amplitude h is selected to be c, the pitch angle is 75°, and the dimensionless reduced frequency
0.12, 0.14, 0.16, and study the relationship between the performance of the hydrofoil designed and the reduced frequency.
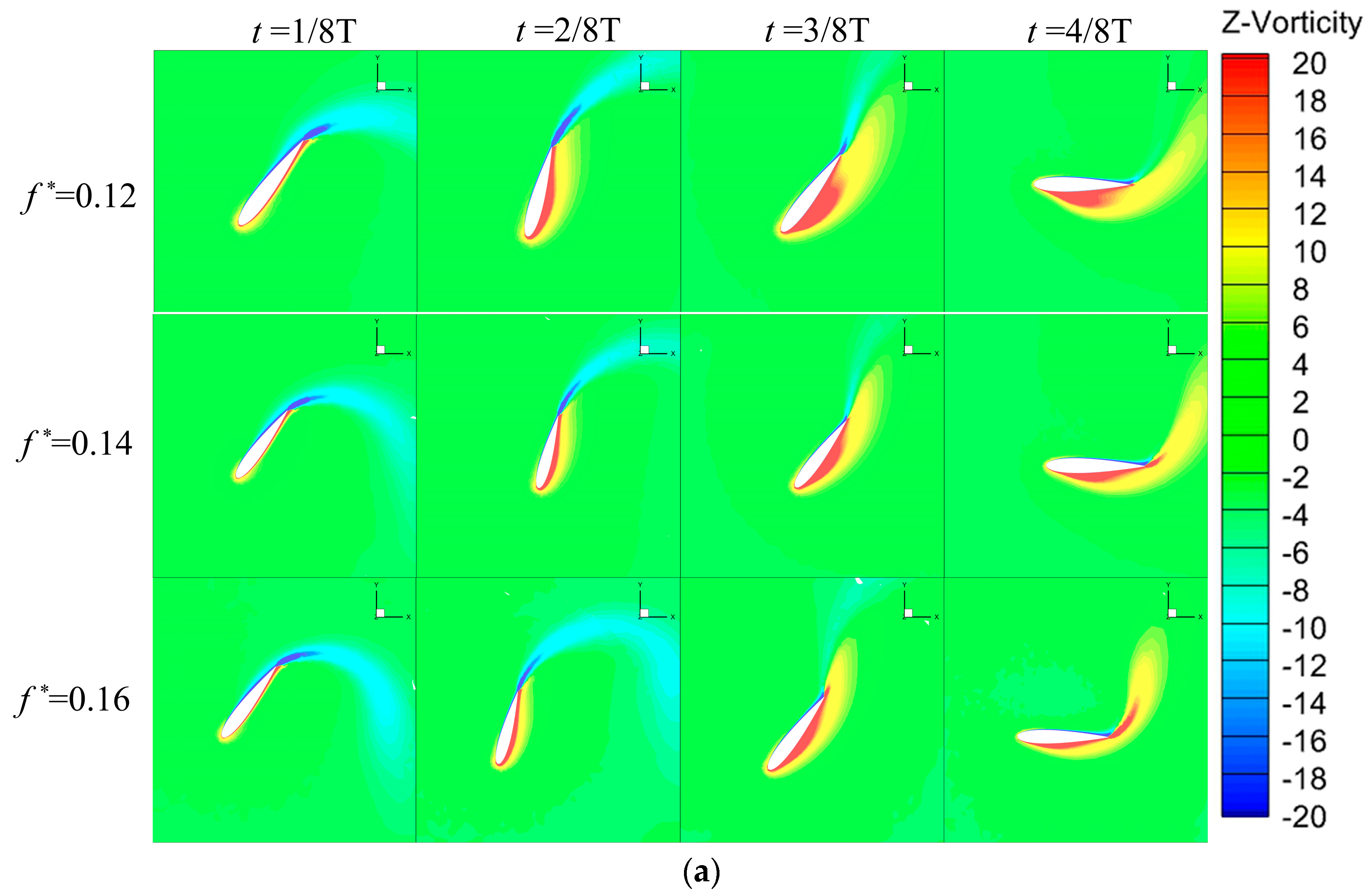
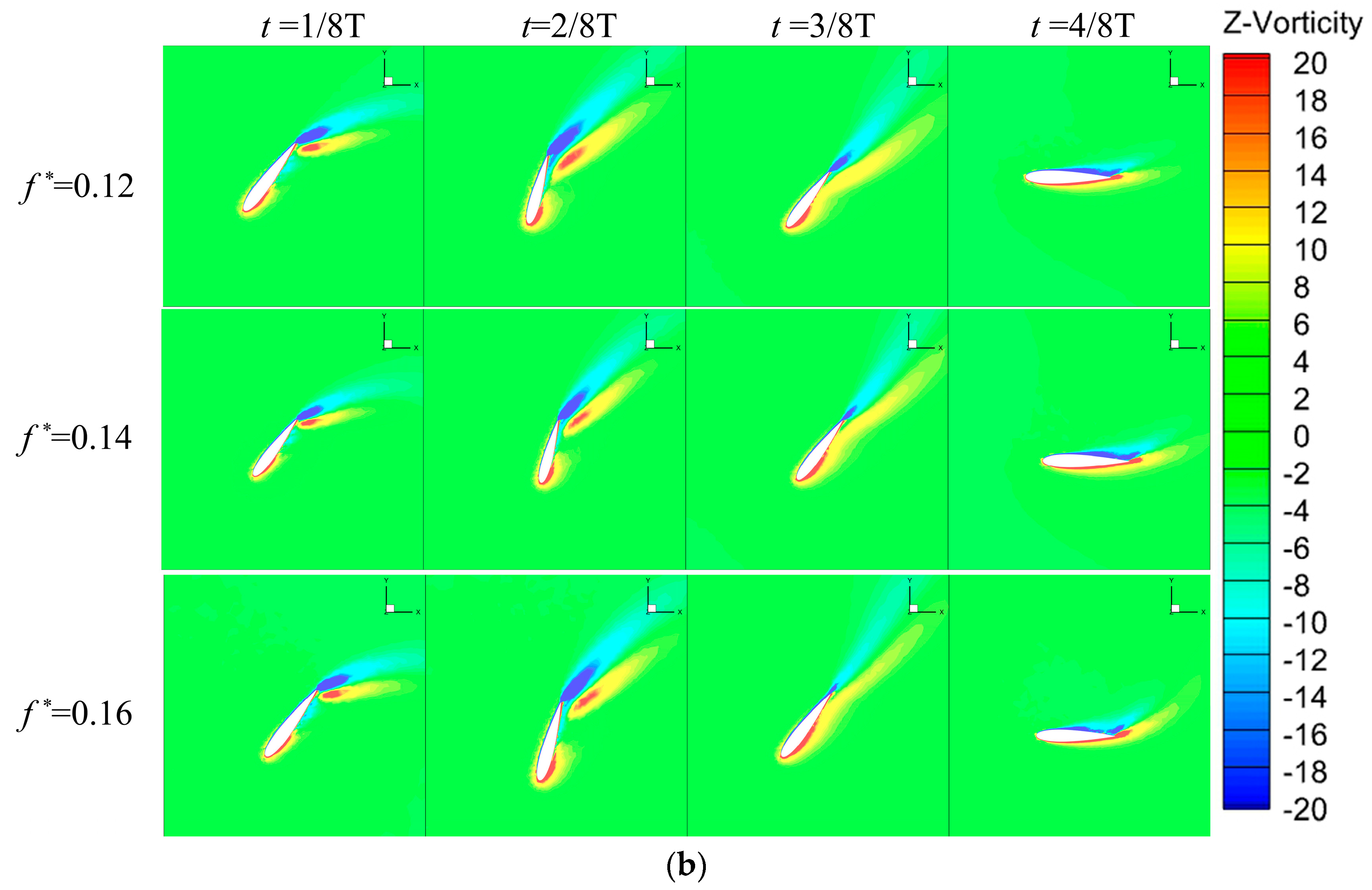
Table 9 shows the comparison of the coefficients under different reduced frequencies,
Figure 10 shows the dimensionless reduced frequency hydrofoil’s vorticity contours, and
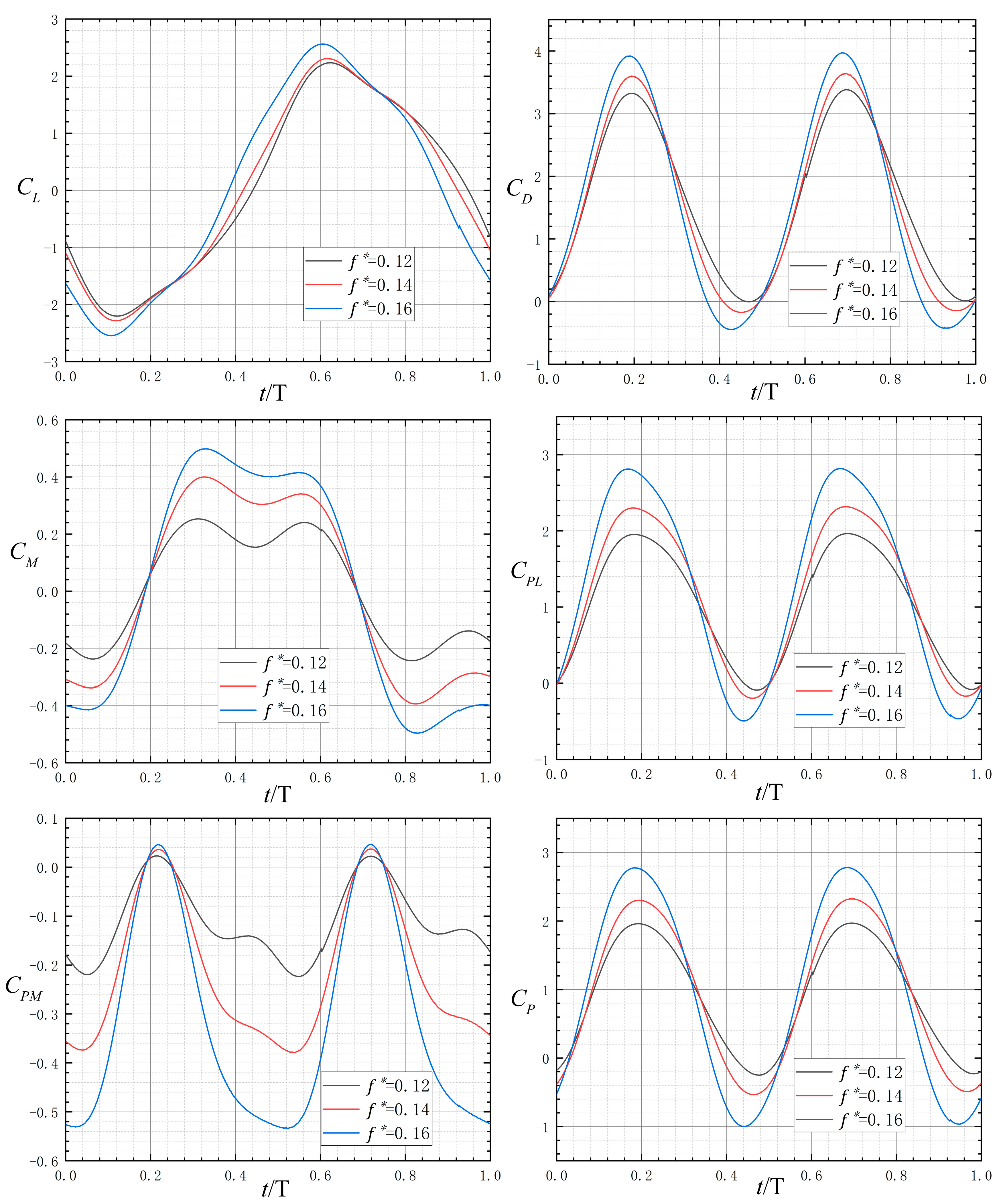
Figure 11 shows the coefficient curves under different reduced frequencies.
From
Figure 12, the dimensionless reduced frequency
has a great influence on the peak value of each curve of coefficients, and the higher the reduced frequency, the larger the peak value. Combined with the data in
Table 9, the increase in dimensionless reduced frequency
has little effect on the average resistance, the average lift power increases while the average moment power increases, and the average power first increases and then decreases due to the negative value of the work performed by the moment. From
Figure 11, under three dimensionless reduced frequencies, there is no obvious phenomenon of vortex shedding caused by boundary layer separation on the hydrofoil wall, and from the stage of 3/8 T to 4/8 T, the vortex at the mid-section of the hydrofoil becomes smaller when the reduced frequency
is increased. Therefore, continuing to increase the dimensionless reduced frequency does not improve the average power of the hydrofoil, which is higher at
0.14.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}