


Research on Sensorless Technology of a Magnetic Suspension Flywheel Battery Based on a Genetic BP Neural Network


Abstract
1. Introduction
2. Overall Structure and Basic Principle of Magnetic Suspension Flywheel Battery
3. Principle of Sensorless Technology of Magnetic Suspension Flywheel Battery
3.1. Basic Principle of Sensorless Technology
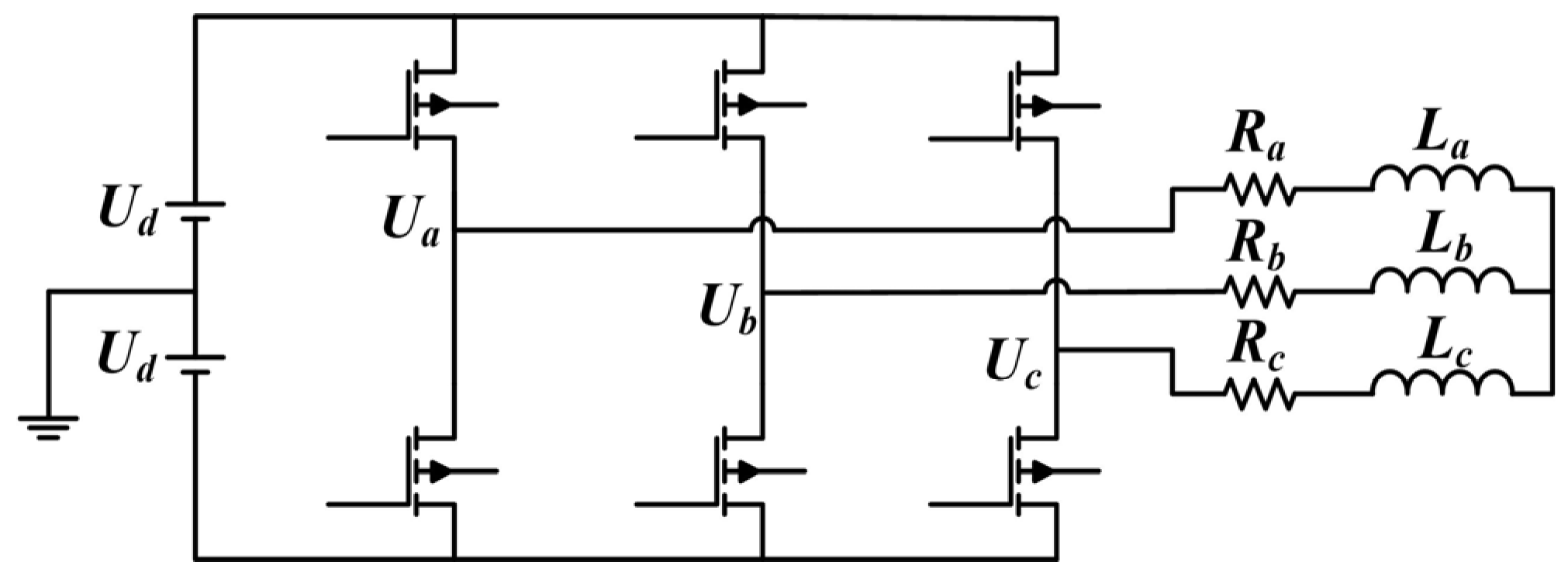
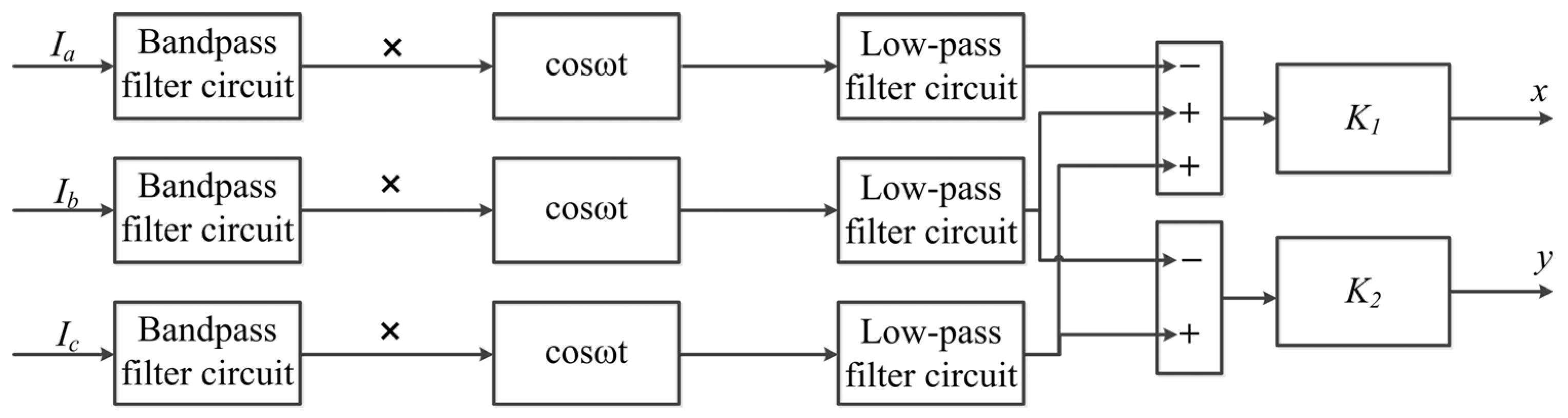
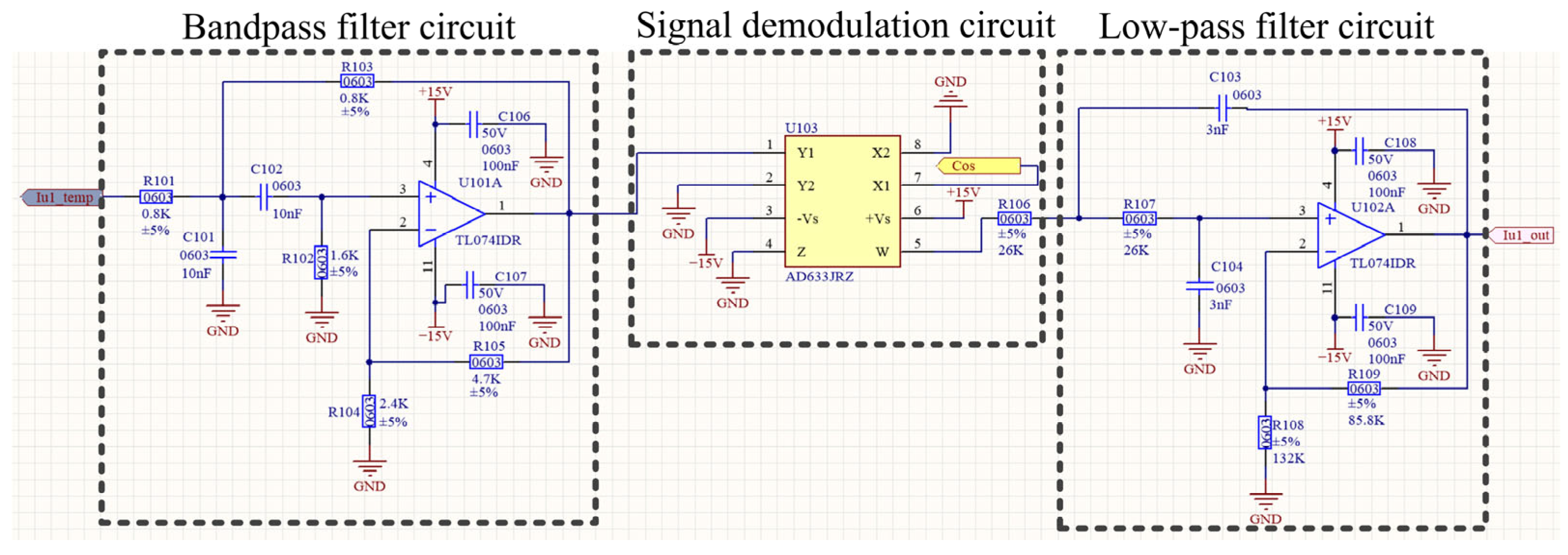
3.2. Displacement Signal Detection Circuit
- (1)
- Band-pass filter circuit
- (2)
- Signal demodulation circuit
- (3)
- Low-pass filter circuit
4. Design of a PID Controller Based on a Genetic BP Neural Network
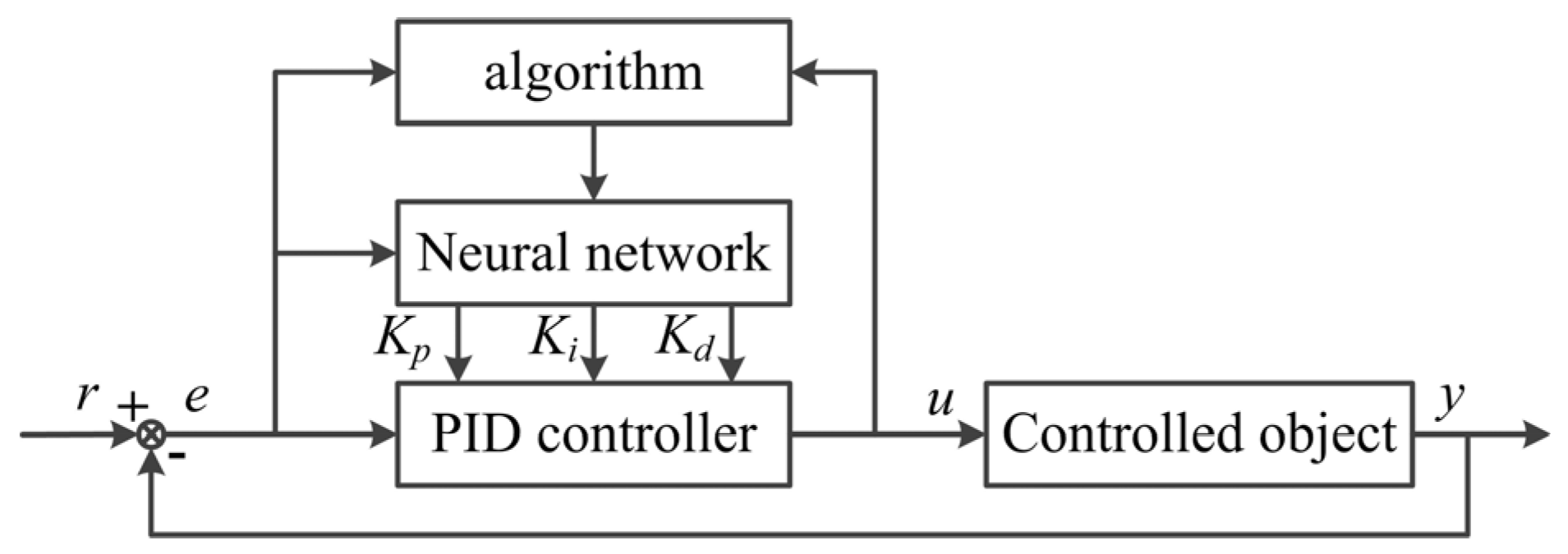
4.1. PID Control Based on a BP Neural Network
- The input mode is propagated forward. According to the teacher’s learning method, the input mode is propagated from the input layer through the middle layer to the output layer, and the corresponding actual output is calculated.
- Output mode backpropagation. According to the principle of reducing the error between the expected output and the actual output, the connection weight is corrected layer by layer from the output layer through various intermediate layers and finally back to the input layer.
- Cyclic memory training. The calculation process of model forward propagation and error backpropagation is repeated alternately. In order to minimize the output error of the network. For each set of training patterns input to the BP network, it is generally necessary to undergo hundreds or even tens of thousands of cycles of memory training to make the network remember this pattern.
- Learning outcome discrimination. Determine whether the global error tends toward a minimum. After each cyclic memory training, the learning results should be judged. The purpose of judgment is mainly to check whether the output error has been small enough to allow. If the output error is small enough to allow, you can end the entire learning process, otherwise you need to cycle-train. As this error backpropagation training continues in a continuous cycle, the global error of the network tends toward the minimum, and the accuracy of the network’s response to the input pattern is also improved.
- The structure of the BP neural network is selected in advance. That is, the number of nodes in the input layer, M, and the number of nodes in the hidden layer, Q, are selected, and the initial values of the weighting coefficients of each layer, wij(2)(0) and wli(3)(0), are given. Select the learning rate η and the inertia coefficient, α; k = 1.
- Sample r(k) and y(k); calculate e(k) = z(k) = r(k) − y(k).
- For r(i), y(i), u(i − 1), (i =k, k − 1,..., k − p) for normalization processing, as the input of the neural network.
- The input and output of neurons in each layer of the neural network are calculated forward according to Equations (18)~(20). The output of the neural network’s output layer is the three adjustable parameters of the PID controller: kp(k), ki(k), and kd(k).
- Calculate the control output u(k) of the PID controller; participate in the control and calculation. Calculate the weighted coefficient of the corrected output layer. Calculate the weighted coefficient of the corrected hidden layer. Set k = k + 1; return to 1.
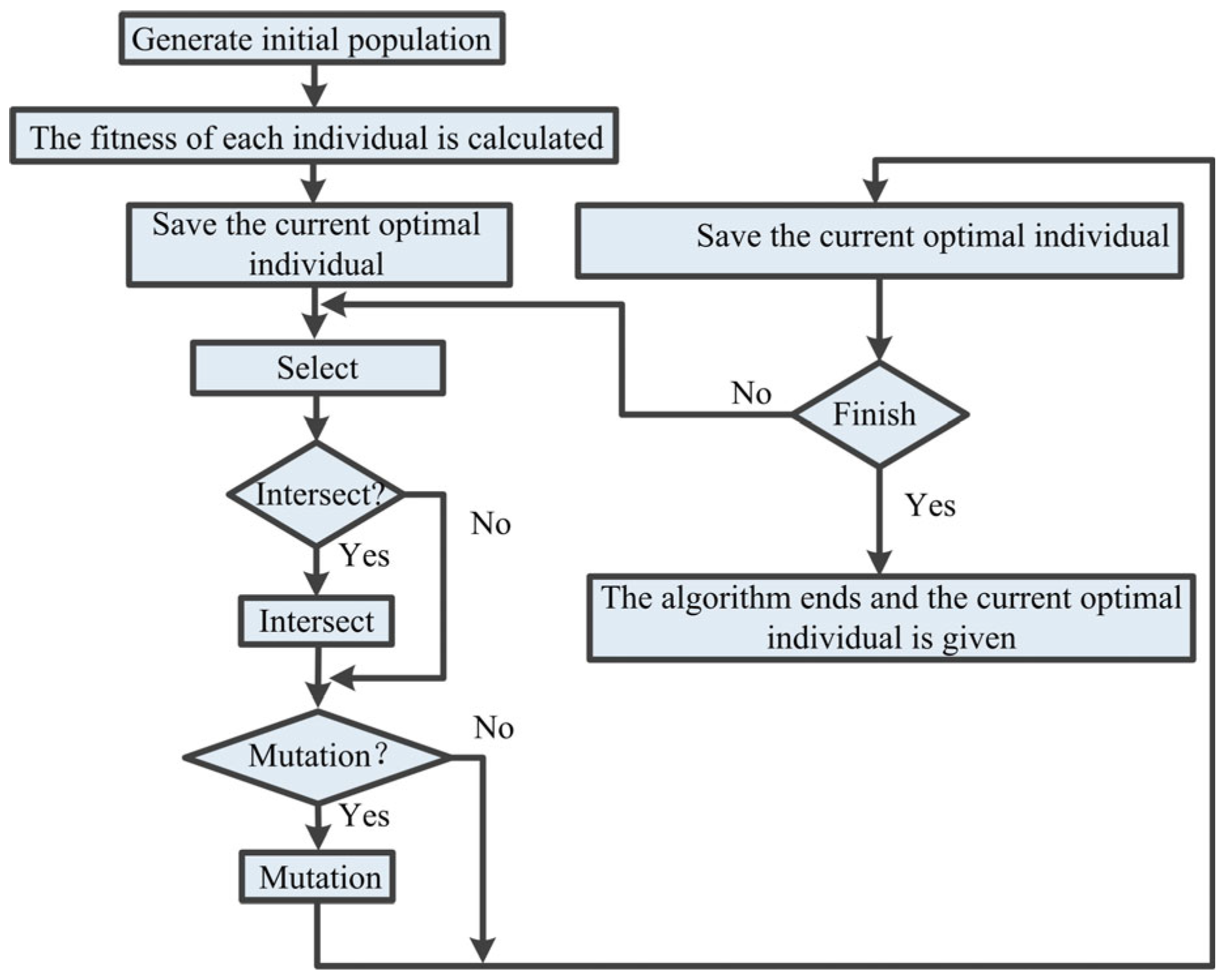
4.2. The Combination of Genetic Algorithms and Artificial Neural Networks
- Select the network structure and learning rules. A set of connection weights is randomly generated, and each connection weight is encoded by some coding scheme. The link weights in the network are arranged at one time to form a code chain. Each code chain represents a connection weight distribution state of the network, and a group of code chains represents a group of neural networks with different connection weights.
- The error function of the neural network under each corresponding code chain is calculated, and the fitness function of genetic algorithm is given. The smaller the error, the higher the fitness value.
- Several individuals with the largest fitness function were selected to form the paternal parent.
- Crossover, mutation, and other genetic operators are used to process the current generation population and produce a new generation population.
- Repeat the above steps so that the weight distribution continues to evolve until the training goal is reached.
- A neural network that randomly generates several different structures. Each structure is coded, each code chain corresponds to a network structure, and N code chains constitute a population.
- Each network is trained separately with a variety of initial connection weights.
- Calculate the error function of the neural network under each corresponding code chain and use the error function or other strategies to determine the fitness function of each individual.
- Several individuals with the largest fitness function values were selected to form the paternal parent.
- Crossover, mutation, and other performance operators are used to deal with the current generation of groups and produce a new generation of groups.
- Repeat the above steps until an individual in the group meets the requirements.
- Several individuals are generated, each individual corresponds to a learning rule, and each learning rule is encoded by some coding scheme.
- Form a training set, where each element corresponds to a neural network. The structure and initial connection weights of each neural network are selected or randomly generated, and then the elements of the training set are trained separately with each learning rule.
- Calculate the fitness of each learning rule.
- Several individuals with the largest fitness function values were selected to form the paternal parent.
- Crossover, mutation, and other genetic operators are used to process the current generation population and produce a new generation population.
- Repeat the above steps until an individual in the group meets the requirements.
4.3. Application of PID Controller Based on Genetic BP Neural Networks in Sensorless Technology of Flywheel Batteries
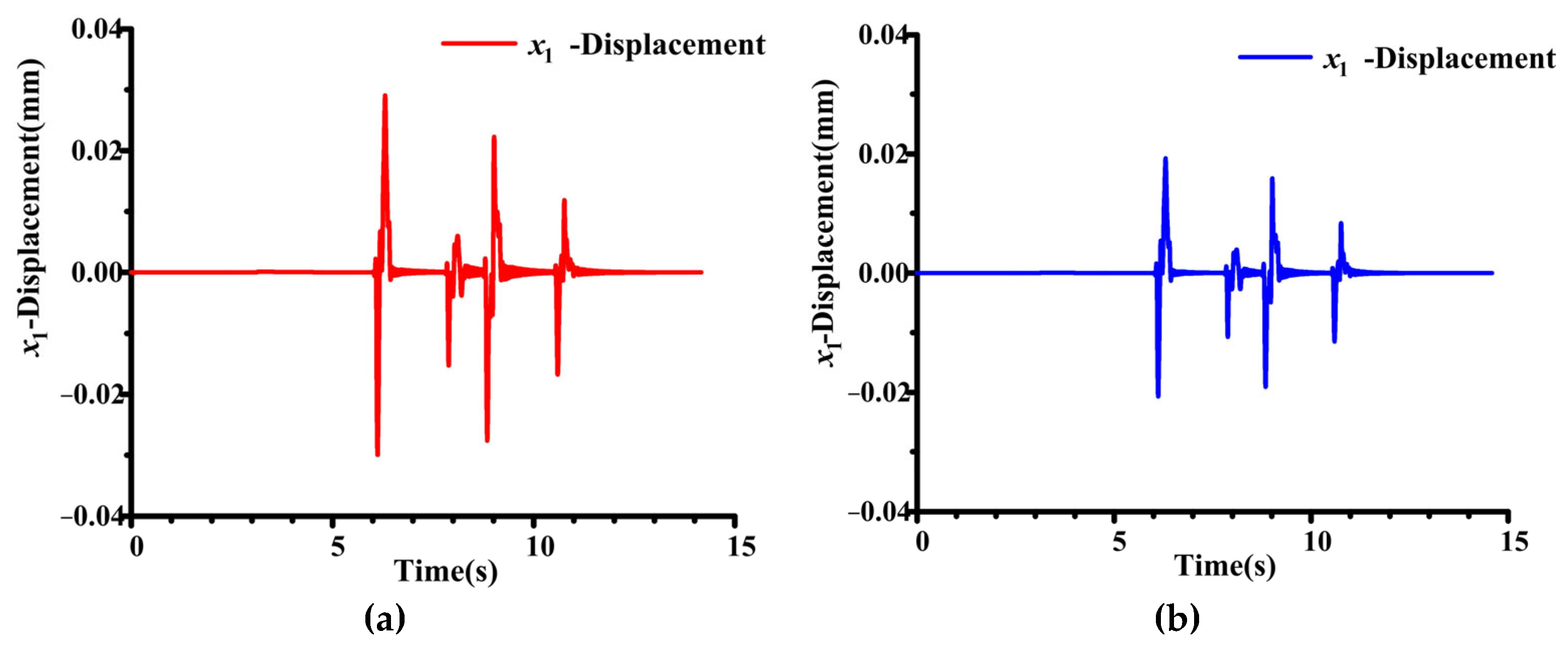
4.4. Simulation Results
- (1)
- Most of the existing research on sensorless technologies for magnetic suspension flywheel batteries does not take into account the influencing factors of the application scenarios. Due to the particularity of the application scenario of vehicle-mounted flywheel batteries, the sensorless control strategy in this paper considers the adverse impacts of the important factor of complex and changeable road conditions on the rotor suspension stability of vehicle-mounted flywheel batteries and the performance of the control system and proposes an optimization scheme.
- (2)
- In existing research on the control systems of vehicle-mounted magnetic suspension flywheel batteries, among most of the studies that consider the influence of road conditions, only the optimal PID controller parameters corresponding to different road conditions are provided, but there is no explanation of how the controller conducts real-time mode selection and outputs the optimal control parameters under different road conditions.
- (3)
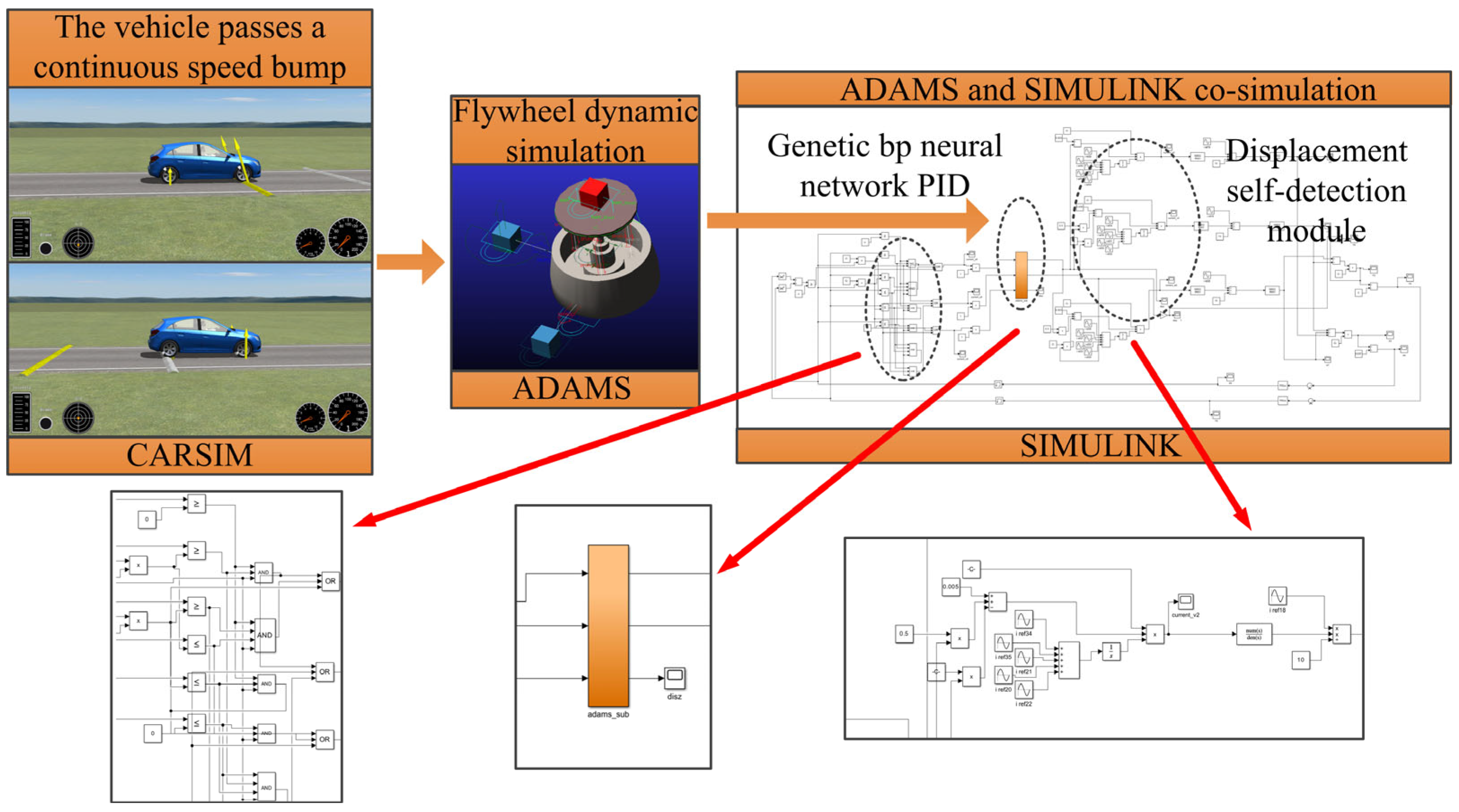
- In research on the control systems of vehicle-mounted magnetic suspension flywheel batteries, when a small number of studies use neural network algorithms to optimize the controller, they only consider simple road conditions, such as acceleration, deceleration, turning, going uphill, etc. However, the driving environment for vehicles in real life is more complex. This paper takes into account more complex, continuous interference road conditions. Through the joint simulation of the dynamics simulation software ADAMS and MATLAB, a database of optimal PID control parameters for complex road conditions has been established. Through sensorless technology, the current of the flywheel battery is converted into an offset for a large number of training sessions, enabling the genetic BP neural network PID controller to accurately identify the current complex road conditions according to the offset and provide the best PID control parameters corresponding to the road conditions to precisely and stably control the flywheel rotor in real time.
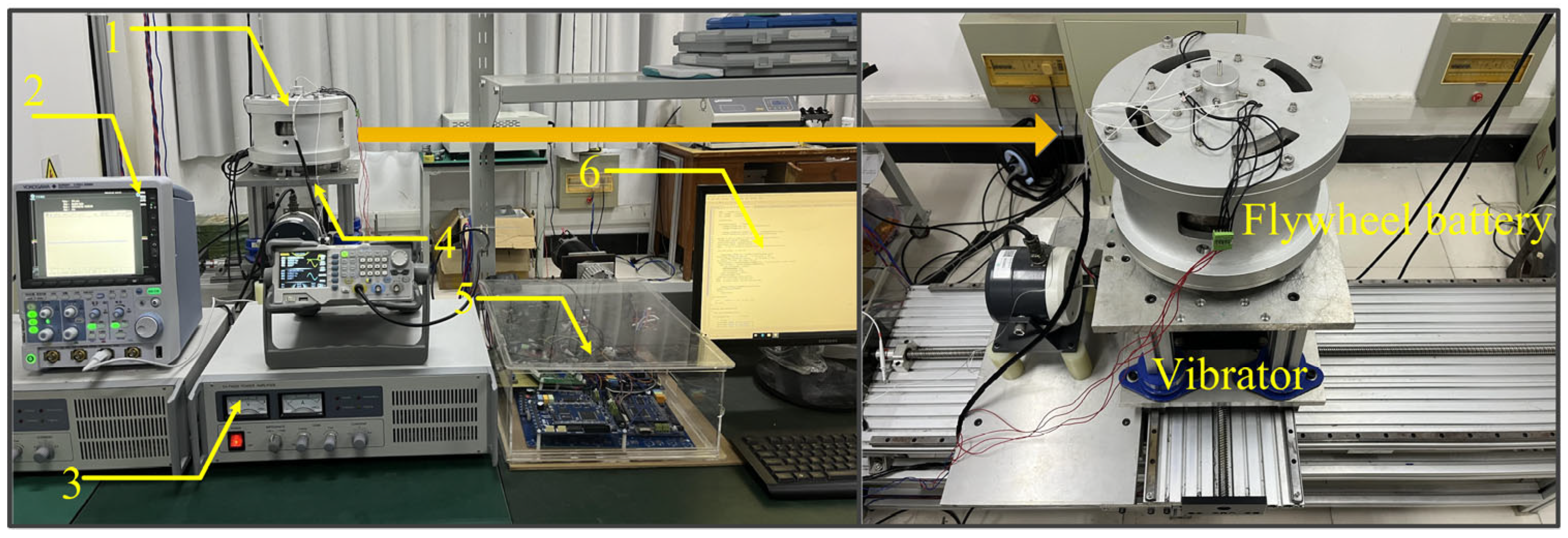
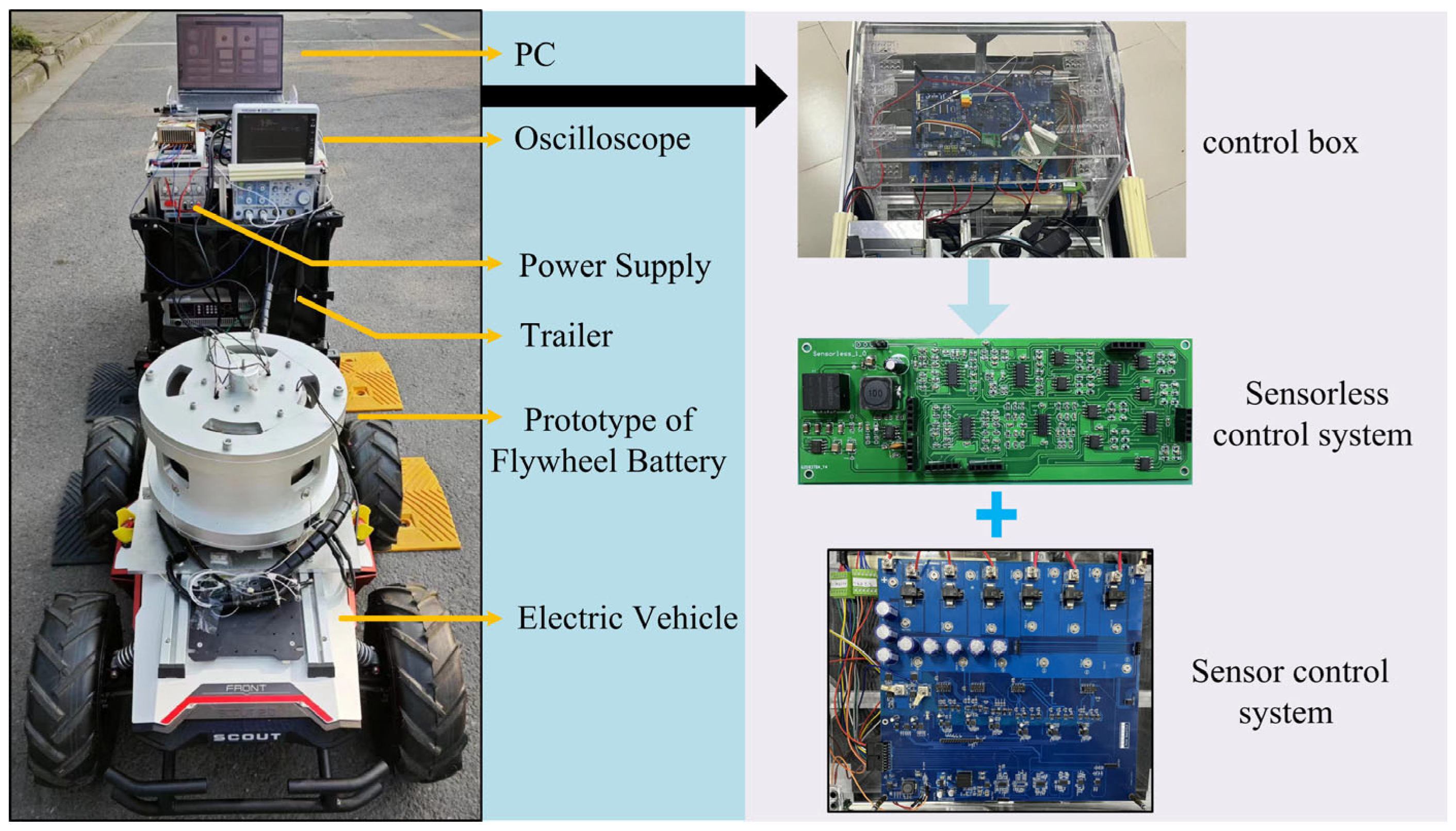
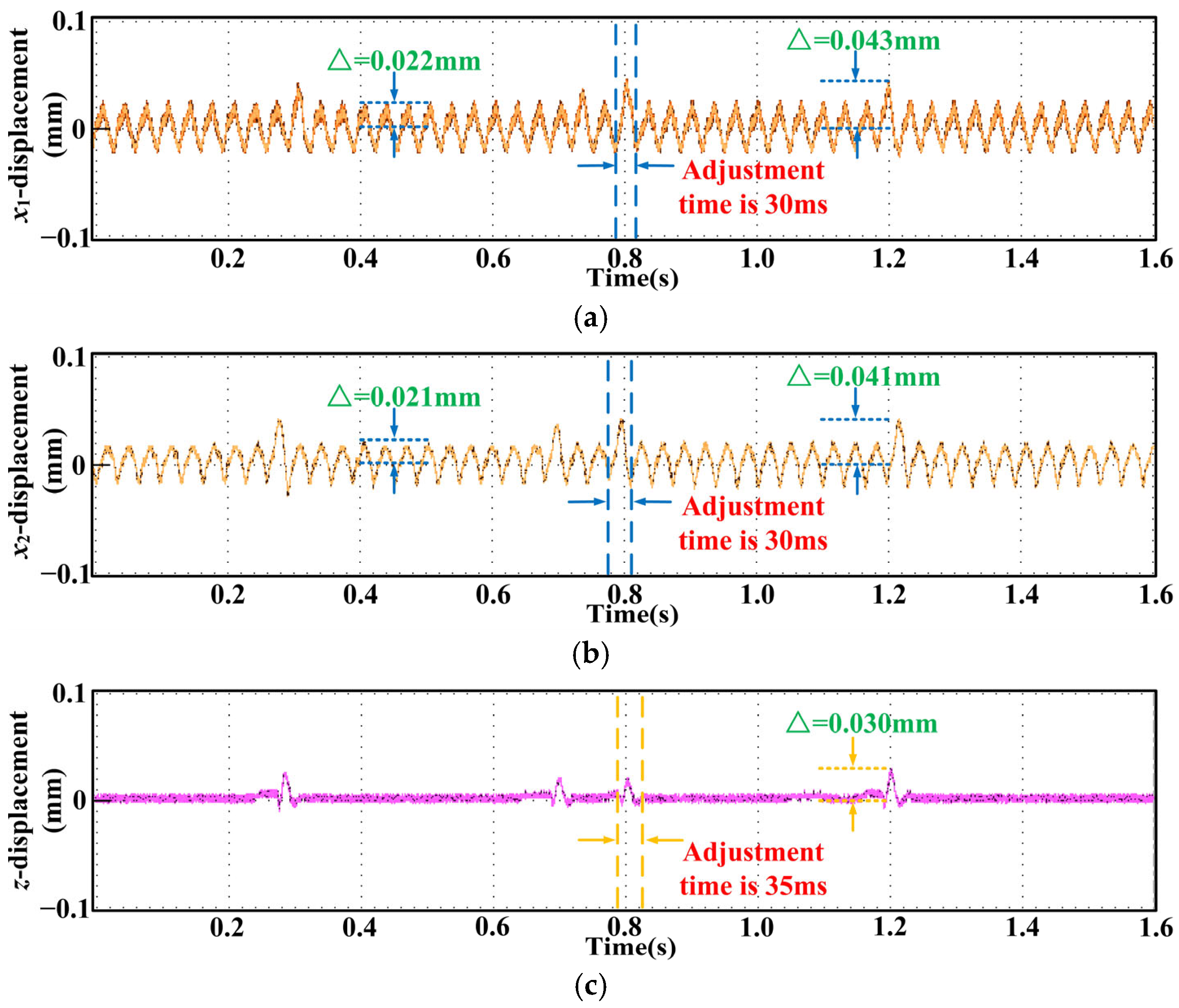
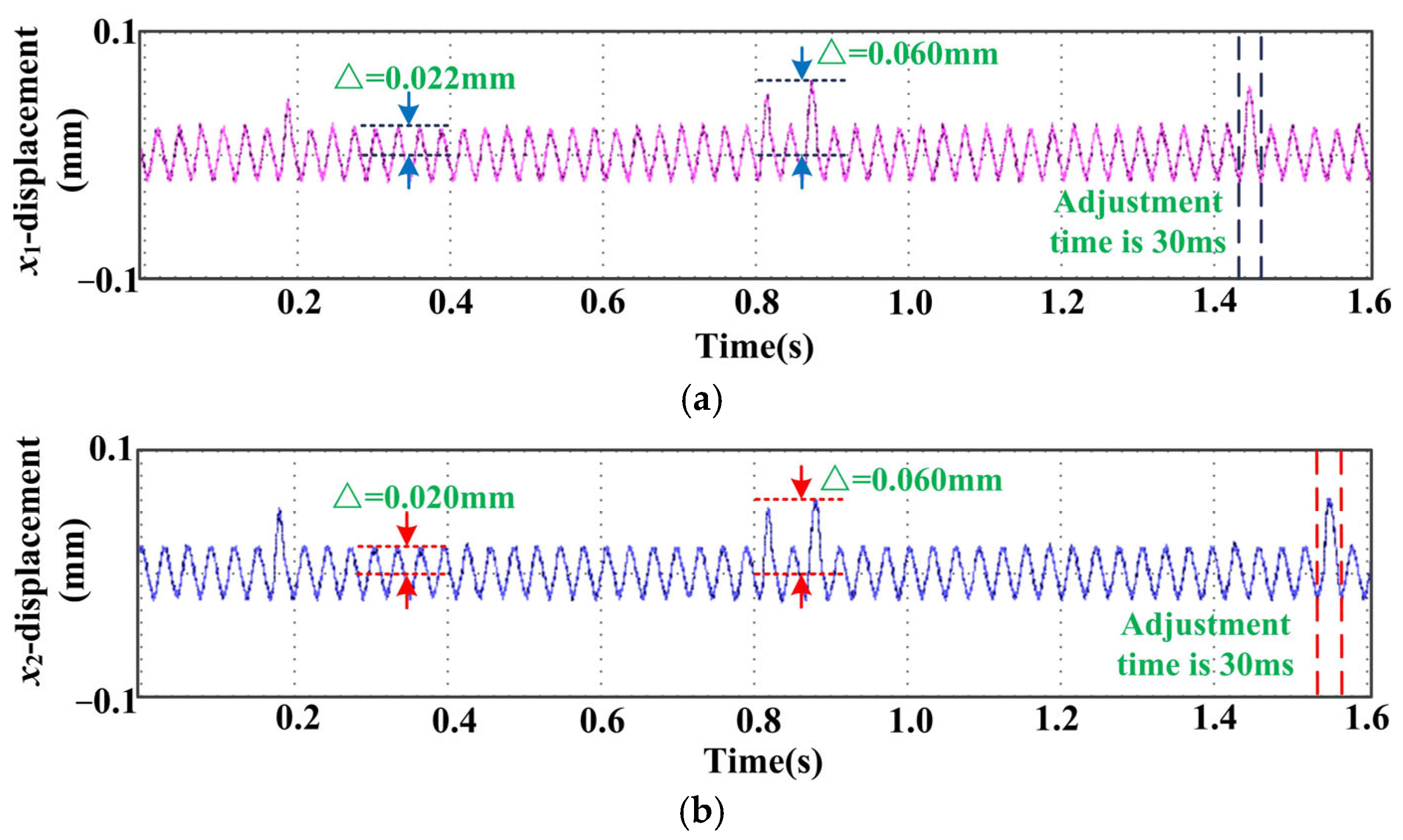
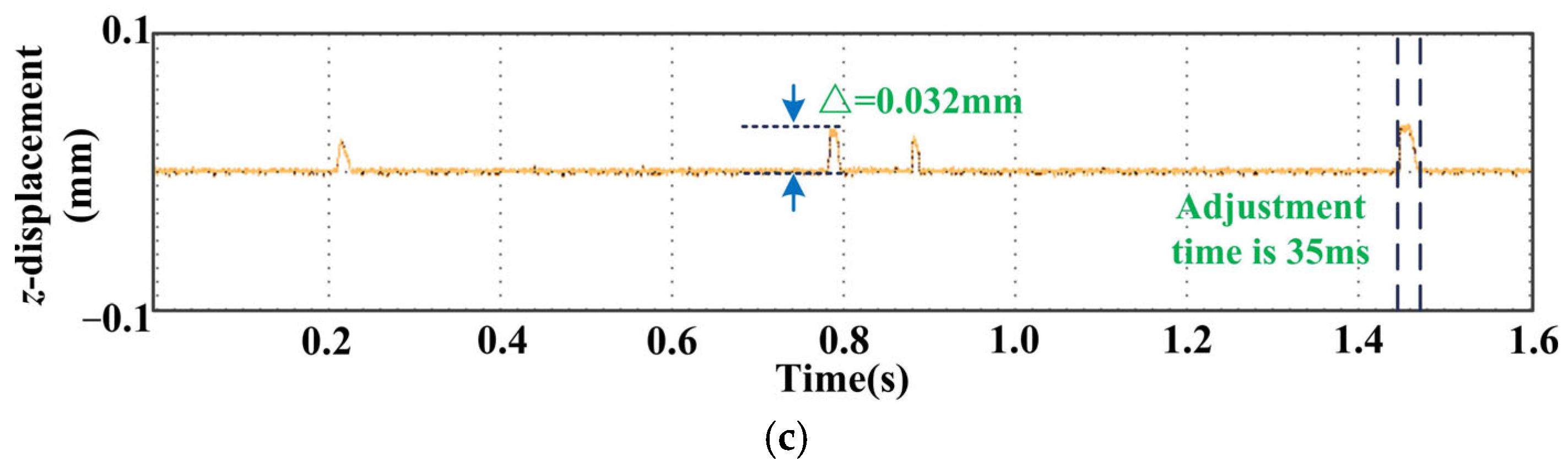
5. Experiments and Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, X.; Anvari, B.; Palazzolo, A.; Wang, Z.; Toliyat, H. A utility-scale flywheel energy storage system with a shaftless, hubless, high-strength steel rotor. IEEE Trans. Ind. Electron. 2018, 65, 6667–6675. [Google Scholar]
- Rath, M.; Schweighofer, B.; Wegleiter, H. Influence of position on optoelectronic strain measurement systems for flywheels. IEEE Sensors Letters 2023, 7, 6005404. [Google Scholar]
- Bianchini, C.; Torreggiani, A.; David, D.; Bellini, A. Design of motor/generator for flywheel batteries. IEEE Trans. Ind. Electron. 2021, 68, 9675–9684. [Google Scholar]
- Ershad, N.F.; Mehrjardi, R.T.; Ehsani, M. Efficient flywheel-based all-wheel-drive electric powertrain. IEEE Trans. Ind. Electron. 2021, 68, 5661–5671. [Google Scholar]
- Kienast, J.; Bernet, S.; Sturm, G. Operation, design, and losses of the modular multilevel matrix converter in a flywheel energy storage system. IEEE Open J. Ind. Appl. 2023, 4, 336–345. [Google Scholar]
- Yan, H.; Wang, W.; Xu, Y.; Zou, J. Position sensorless control for PMSM drives with single current sensor. IEEE Trans. Ind. Electron. 2023, 70, 178–188. [Google Scholar]
- Chen, Y.; Du, L.; Sun, Q.; Bai, J.; Li, H.; Shi, Y. Self-calibration method of displacement sensor in AMB-rotor system based on magnetic bearing current control. IEEE Trans. Ind. Electron. 2024, 71, 5148–5156. [Google Scholar]
- Zhu, H.; Liu, T. Rotor displacement self-sensing modeling of six-pole radial hybrid magnetic bearing using improved particle Swarm optimization support vector machine. IEEE Trans. Power Electron. 2020, 35, 12296–12306. [Google Scholar]
- Yu, J.; Zhu, C. A multifrequency disturbances identification and suppression method for the self-sensing AMB rotor system. IEEE Trans. Ind. Electron. 2018, 65, 6382–6392. [Google Scholar]
- Peng, C.; Zheng, S.; Huang, Z.; Zhou, X. Complete synchronous vibration suppression for a variable-speed magnetically suspended flywheel using phase lead compensation. IEEE Trans. Ind. Electron. 2018, 65, 5837–5846. [Google Scholar]
- Yang, J.; Li, Q.; Huang, S.; Ye, C.; Liu, P.; Ma, B.; Wang, L. Design and Analysis of a Novel Permanent Magnet Homopolar Inductor Machine with Mechanical Flux Modulator for Flywheel Energy Storage System. IEEE Trans. Ind. Electron. 2022, 69, 7744–7755. [Google Scholar]
- Yang, J.; Liu, P.; Ye, C.; Wang, L.; Zhang, X.; Huang, S. Multidisciplinary design of high-speed solid rotor homopolar inductor machine for flywheel energy storage system. IEEE Trans. Transp. Electrif. 2021, 7, 485–496. [Google Scholar]
- Mehraban, A.; Ghanbari, T.; Farjah, E. AI-based control of storage capacity in high-power-density energy storage systems, used in electric vehicles. IEEE Trans. Trans. Electrifi. 2024, 10, 2293–2301. [Google Scholar]
- Zhang, W.; Cui, J. Dynamic Performance analysis and control parameter adjustment algorithm for flywheel batteries considering vehicle direct action. Energies 2023, 16, 5882. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Wu, T.; Zhou, W.J. Accurate modeling of saucer-shaped flywheel battery based on magnetic field estimation and virtual air gap transformation. IEEE Trans. Ind. Electron. 2025, 1–12. [Google Scholar] [CrossRef]
- Sun, C.; Zhu, H. Active Disturbance rejection control of bearingless permanent magnet slice motor based on RPROP neural network optimized by improved differential evolution algorithm. IEEE Trans. Power Electron. 2024, 39, 3064–3074. [Google Scholar]
- Wang, X.; Zhu, H. Vibration compensation control of BPMSM with dead-time effect based on adaptive neural network band-pass filter. IEEE Trans. Power Electron. 2022, 37, 7145–7155. [Google Scholar]
- Zhang, W.; Ji, H. High stability control of a magnetic suspension flywheel based on SA-BPNN and CNN+LSTM+ATTENTION. Machines 2024, 12, 710. [Google Scholar] [CrossRef]
- Jing, X.; Cheng, L. An optimal PID control algorithm for training feedforward neural networks. IEEE Trans. Ind. Electron. 2013, 60, 2273–2283. [Google Scholar]
- Zhang, W.; Lv, S. A novel magnetic suspension flywheel battery with a multi-function air gap. Energies 2023, 16, 6795. [Google Scholar] [CrossRef]
- Matsuda, K.; Okada, Y. PWM type self-sensing magnetic levitation control. In Proceedings of the 5th International Conference on Adaptive Structures, Sendai, Japan, 5–7 December 1994; pp. 23–29. [Google Scholar]
- Zhang, Y.; Shan, J.; Song, T.; Huang, Z.; Zhu, X. Back propagation artificial neural network based DC bus capacitance Identification method in three-phase PWM rectifier for charging system of evs. IEEE Trans. Ind. Electron. 2024, 71, 4830–4839. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Flywheel mass | 35.44 kg |
| The rotational speed of the flywheel rotor | 15,000 r/min |
| Radial magnetic pole size | 313.64 mm2 |
| Radial air gap length | 0.5 mm |
| Number of coil turns | 290 |
| Coil current | 1.0 A |
| Proportionality coefficient Kp(x1/x2/z) | 18.3/13.2/55 |
| Integral coefficient Ki(x1/x2/z) | 0.022/0.015/0.064 |
| Differentiation coefficient Kd(x1/x2/z) | 0.073/0.082/0.1322 |
| Parameter | Value |
|---|---|
| The length of the experimental car | 820 mm |
| The width of the experimental car | 310 mm |
| The height of the chassis | 123 mm |
| The weight of the experimental car | 42 kg |
| Rated load | 50 kg |
| Speed | 4.8 m/s |
| Parameter | Value |
|---|---|
| Proportionality coefficient Kp(x1/x2/z) | 15.4/14.2/58.2 |
| Integral coefficient Ki(x1/x2/z) | 0.012/0.0098/0.0941 |
| Differentiation coefficient Kd(x1/x2/z) | 0.082/0.0795/0.151 |
| Parameter | Value |
|---|---|
| Proportionality coefficient Kp(x1/x2/z) | 17.6/15.8/65 |
| Integral coefficient Ki(x1/x2/z) | 0.011/0.010/0.093 |
| Differentiation coefficient Kd(x1/x2/z) | 0.086/0.0835/0.1565 |
| Center Frequency of Band-pass Filter Circuit | 20 kHz |
| Passband of Band-pass Filter Circuit | 1 kHz |
| Cut-off Frequency of Low-Pass Filter Circuit | 2 kHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Guo, F. Research on Sensorless Technology of a Magnetic Suspension Flywheel Battery Based on a Genetic BP Neural Network. Actuators 2025, 14, 174. https://doi.org/10.3390/act14040174
Zhang W, Guo F. Research on Sensorless Technology of a Magnetic Suspension Flywheel Battery Based on a Genetic BP Neural Network. Actuators. 2025; 14(4):174. https://doi.org/10.3390/act14040174
Chicago/Turabian StyleZhang, Weiyu, and Fei Guo. 2025. "Research on Sensorless Technology of a Magnetic Suspension Flywheel Battery Based on a Genetic BP Neural Network" Actuators 14, no. 4: 174. https://doi.org/10.3390/act14040174
APA StyleZhang, W., & Guo, F. (2025). Research on Sensorless Technology of a Magnetic Suspension Flywheel Battery Based on a Genetic BP Neural Network. Actuators, 14(4), 174. https://doi.org/10.3390/act14040174