
Modeling and Analysis of a Cutting Robot for the “Excavation–Backfill–Retention” Integrated Mining and Excavation Equipment

 , , ,
, , ,
Abstract
1. Introduction
2. Demand Analysis and Working Principle of the Cutting Robot
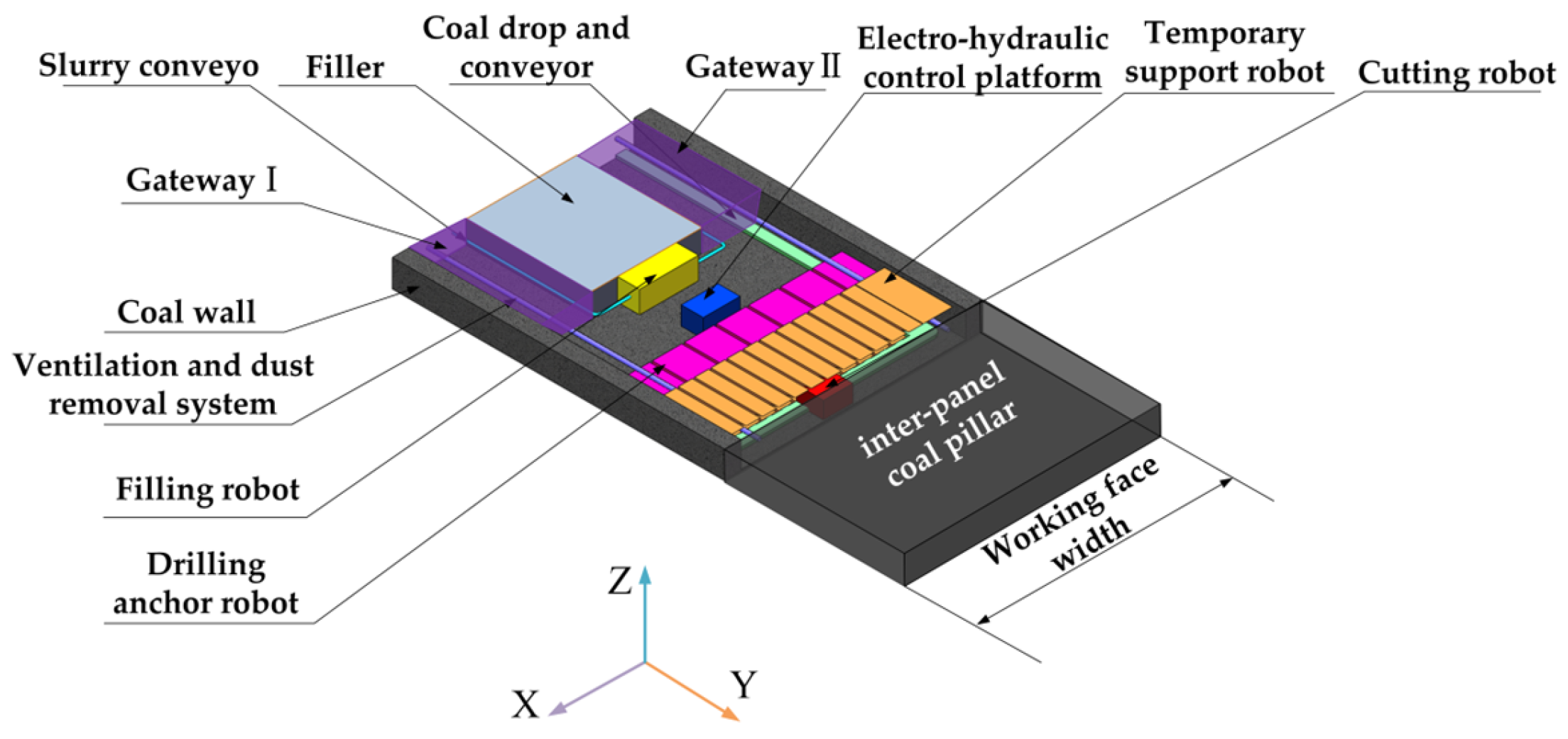
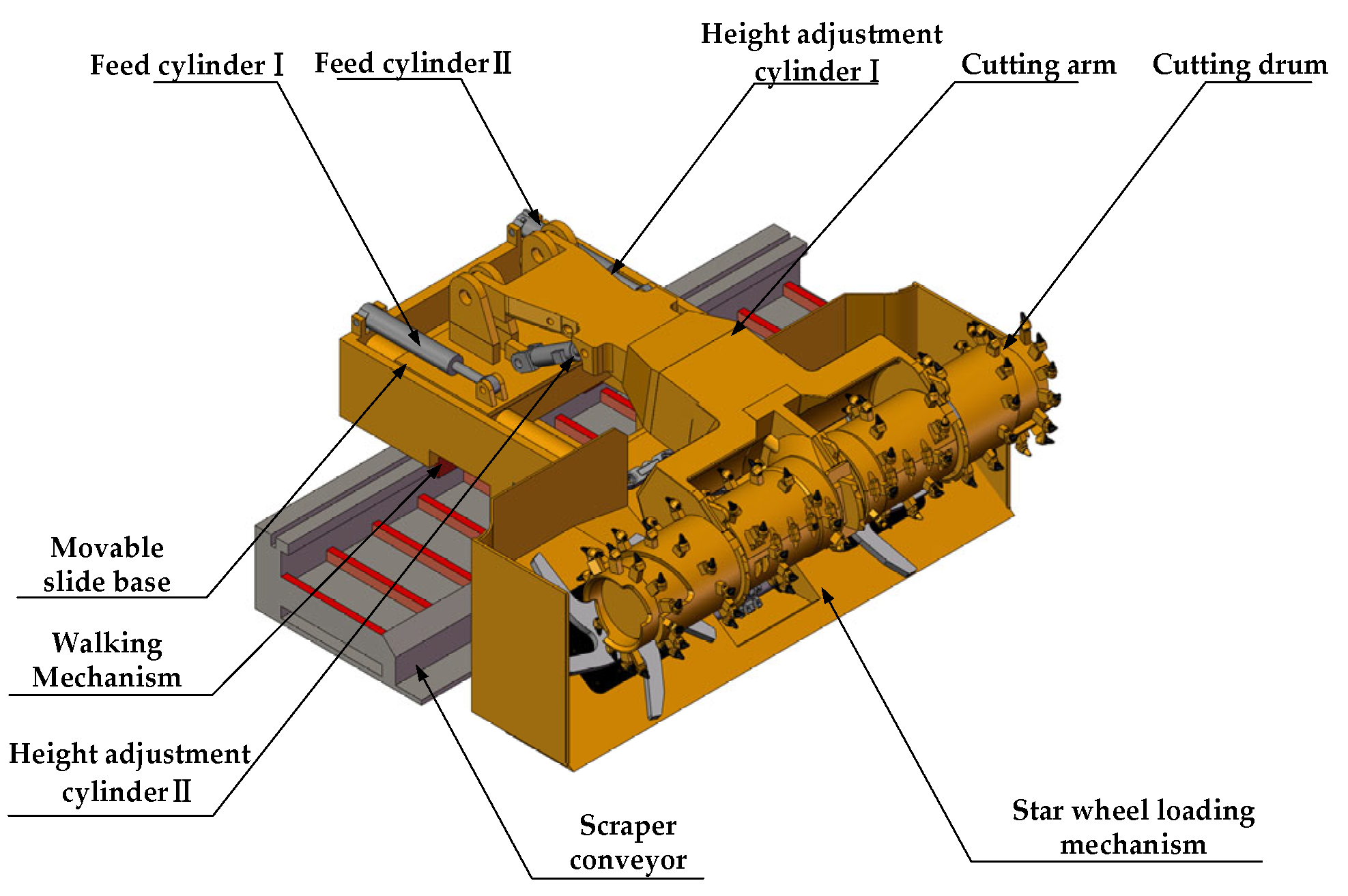
2.1. The System Design for the “Excavation–Backfill–Retention” Integrated Mining and Excavation Equipment
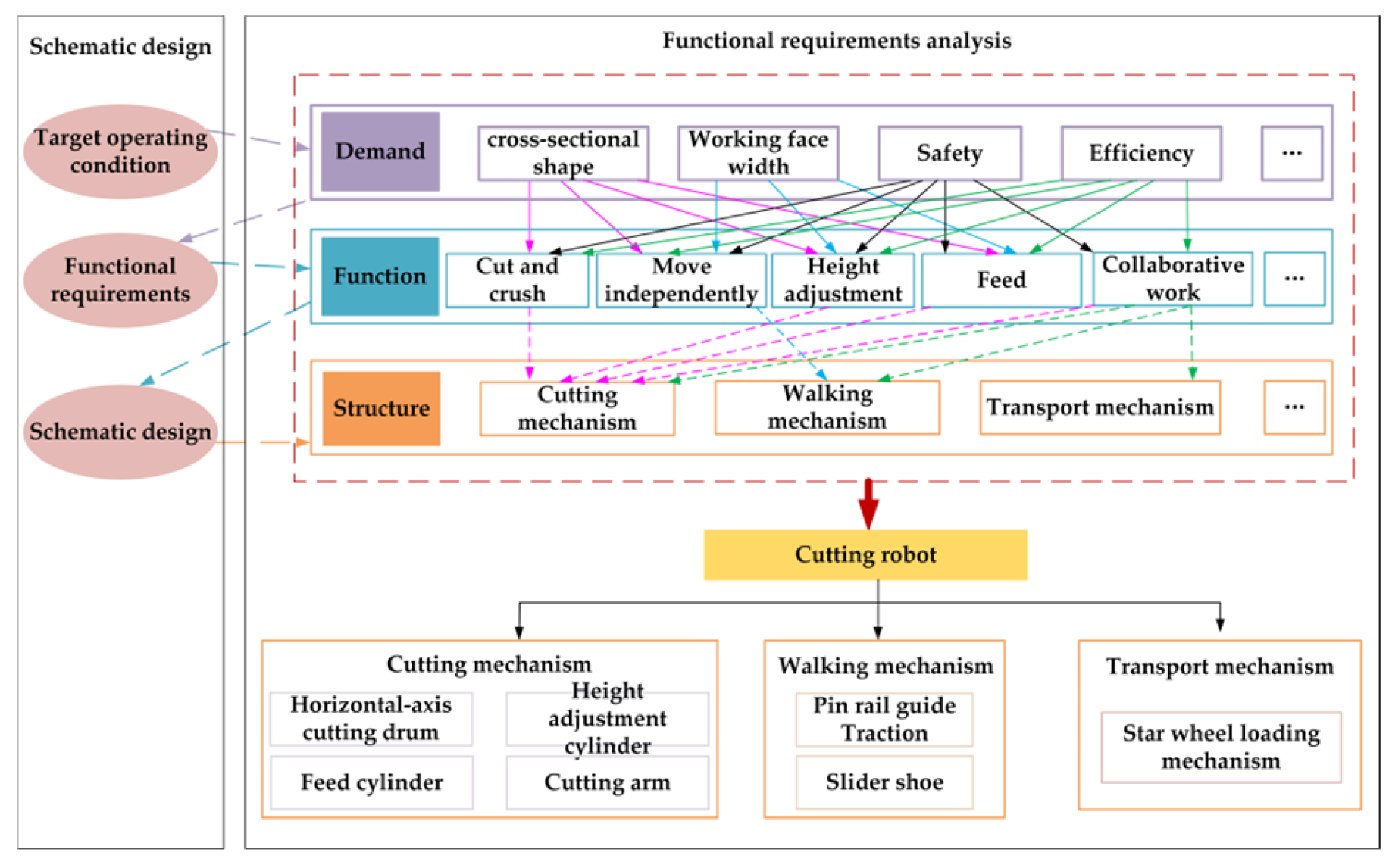
2.2. Demand Analysis for Cutting Robots
2.3. Cutting Robot Working Principle
3. Design of Structural Parameters of Cutting Robot
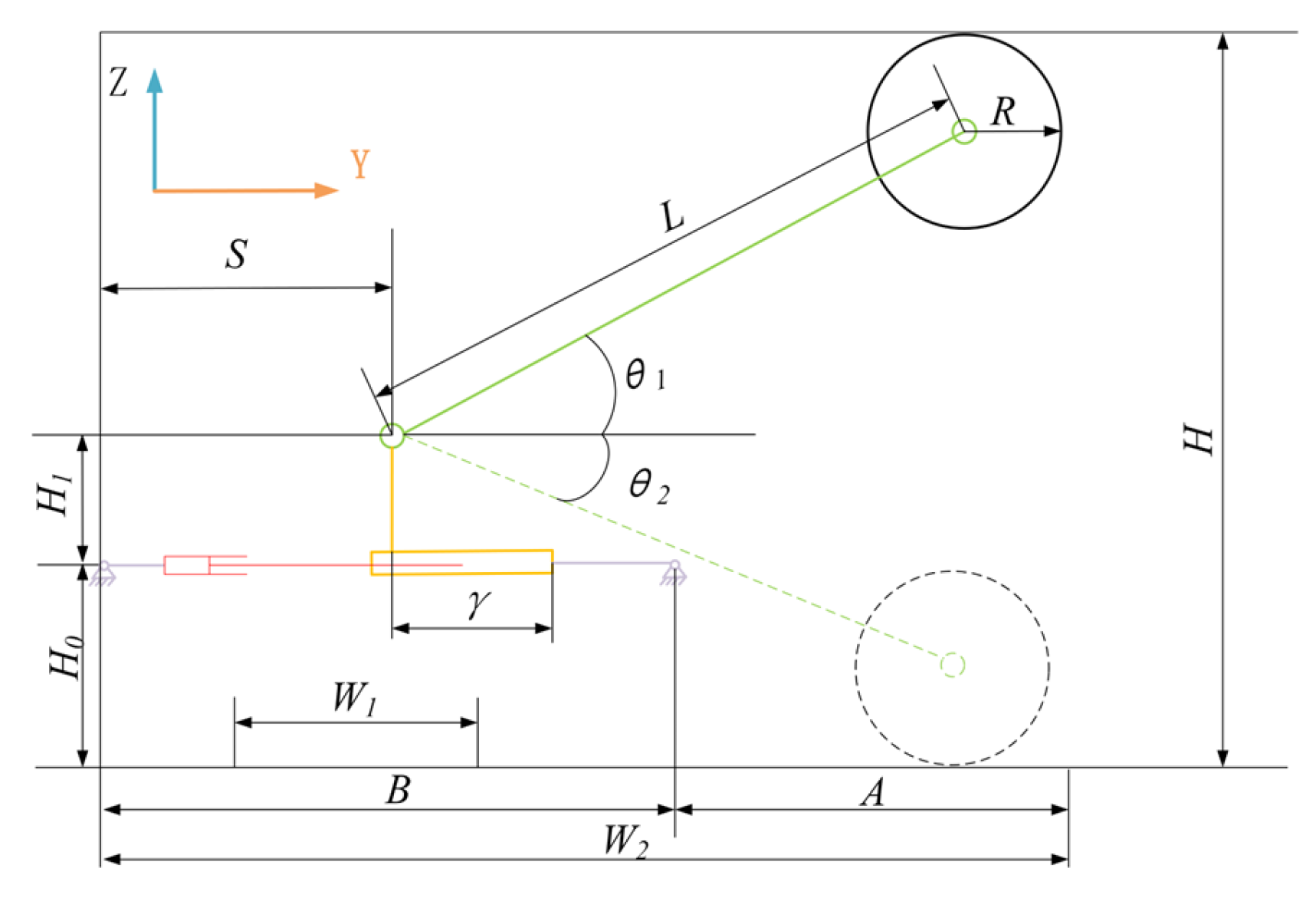
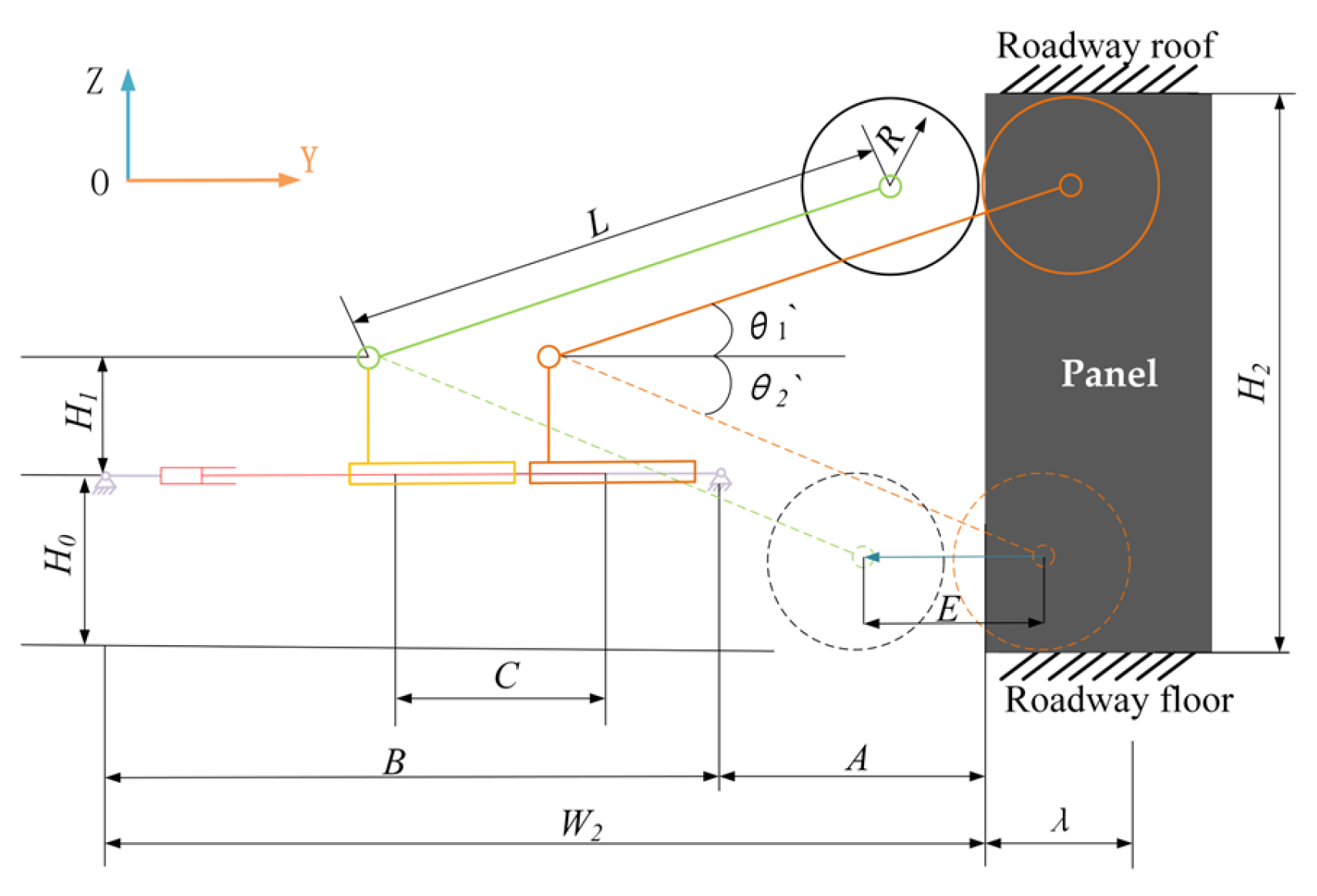
3.1. Modeling the Structural Parameters of the Cutting Robot
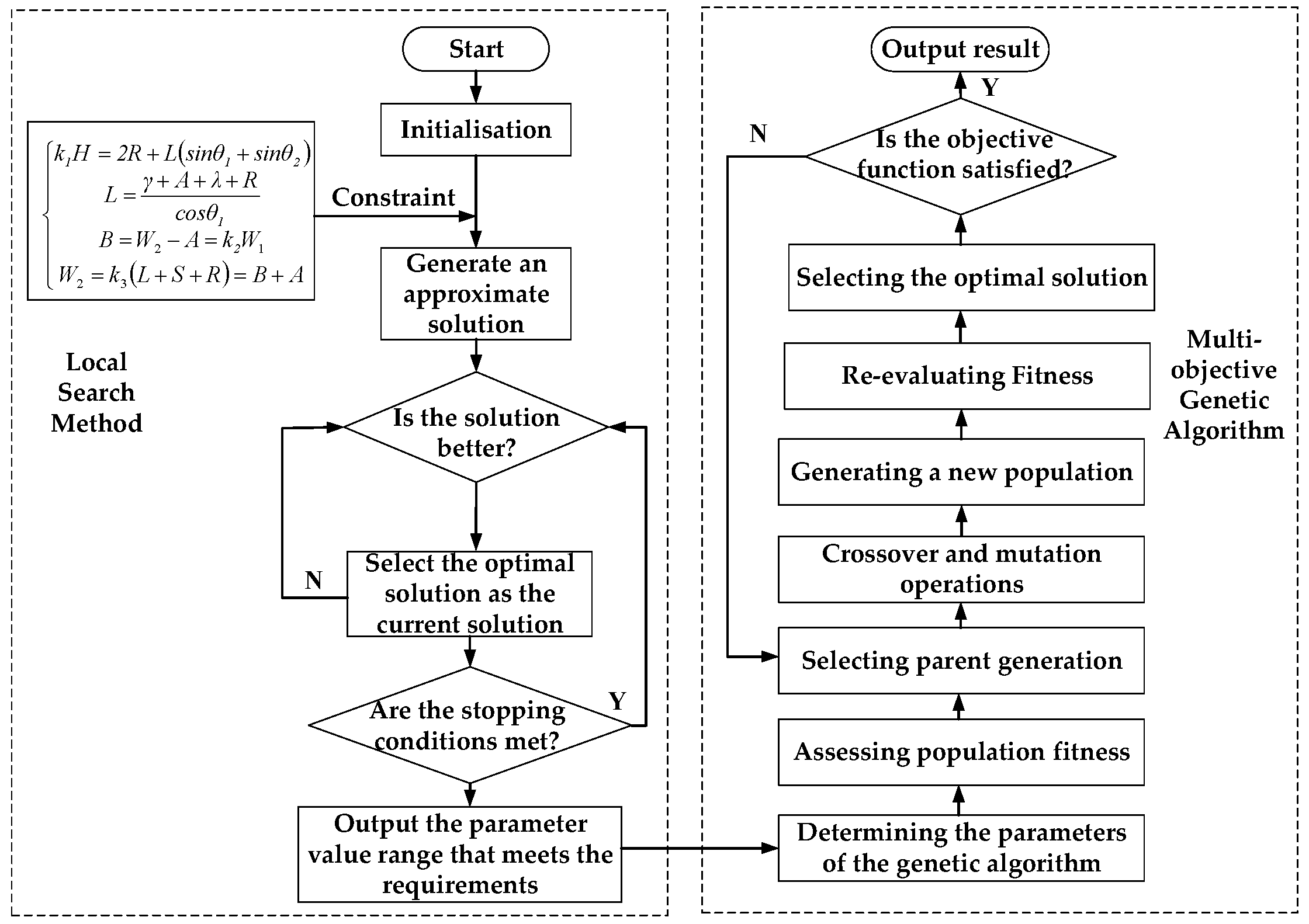
3.2. Solving for the Structural Parameters of the Cutting Robot
4. Kinematic Analysis of the Cutting Robot
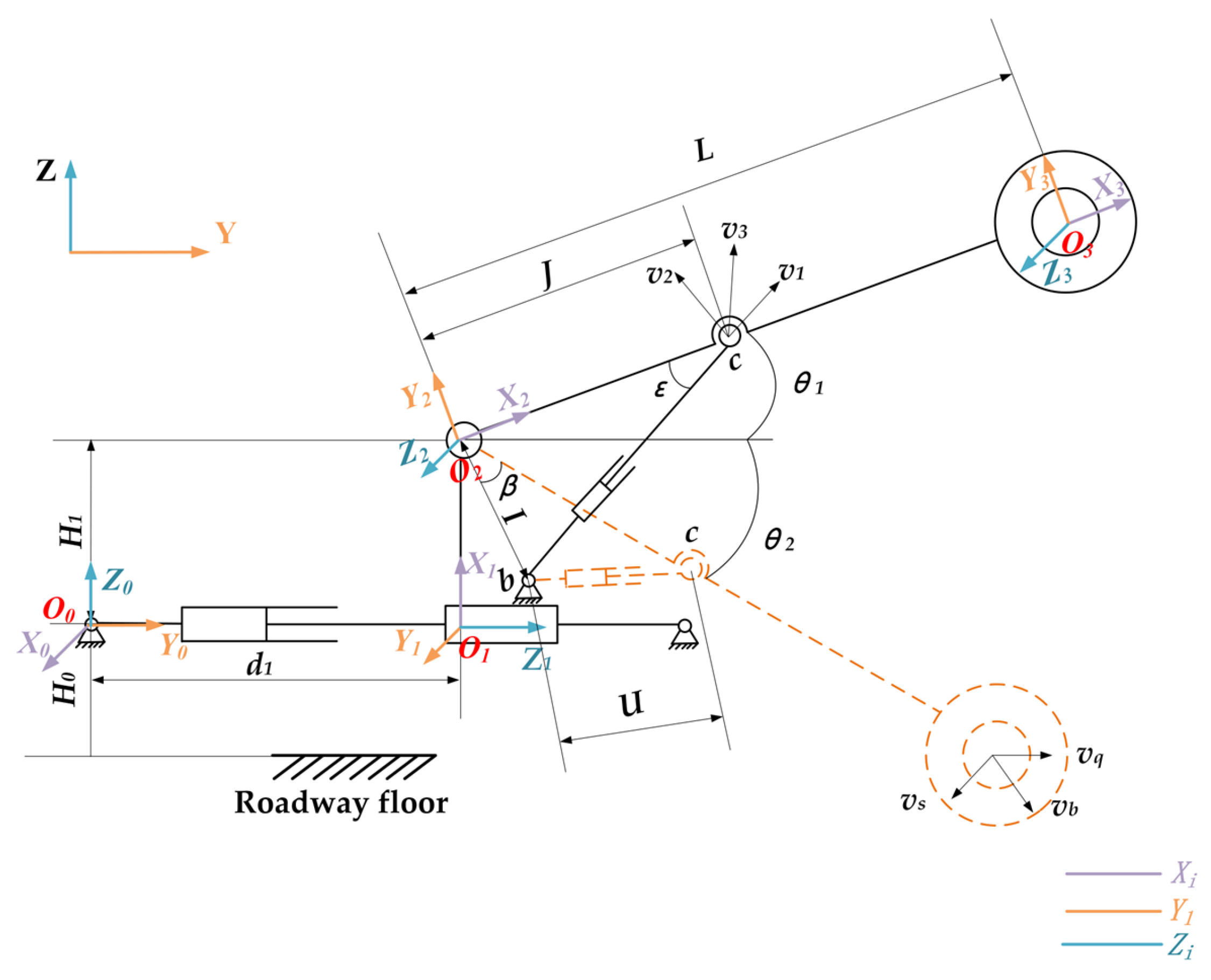
4.1. Kinematic Model of the Cutting Mechanism
4.2. Kinematic Analysis of Cutting Mechanisms
5. Dynamic Analysis of the Cutting Robot
5.1. Mathematical Model of the Dynamics of the Cutting Drum
- FR—Cutting resistance experienced by the cutting teeth on the horizontal-axis cutting head during coal and rock cutting;
- Fk—Traction resistance acting on the cutting teeth;
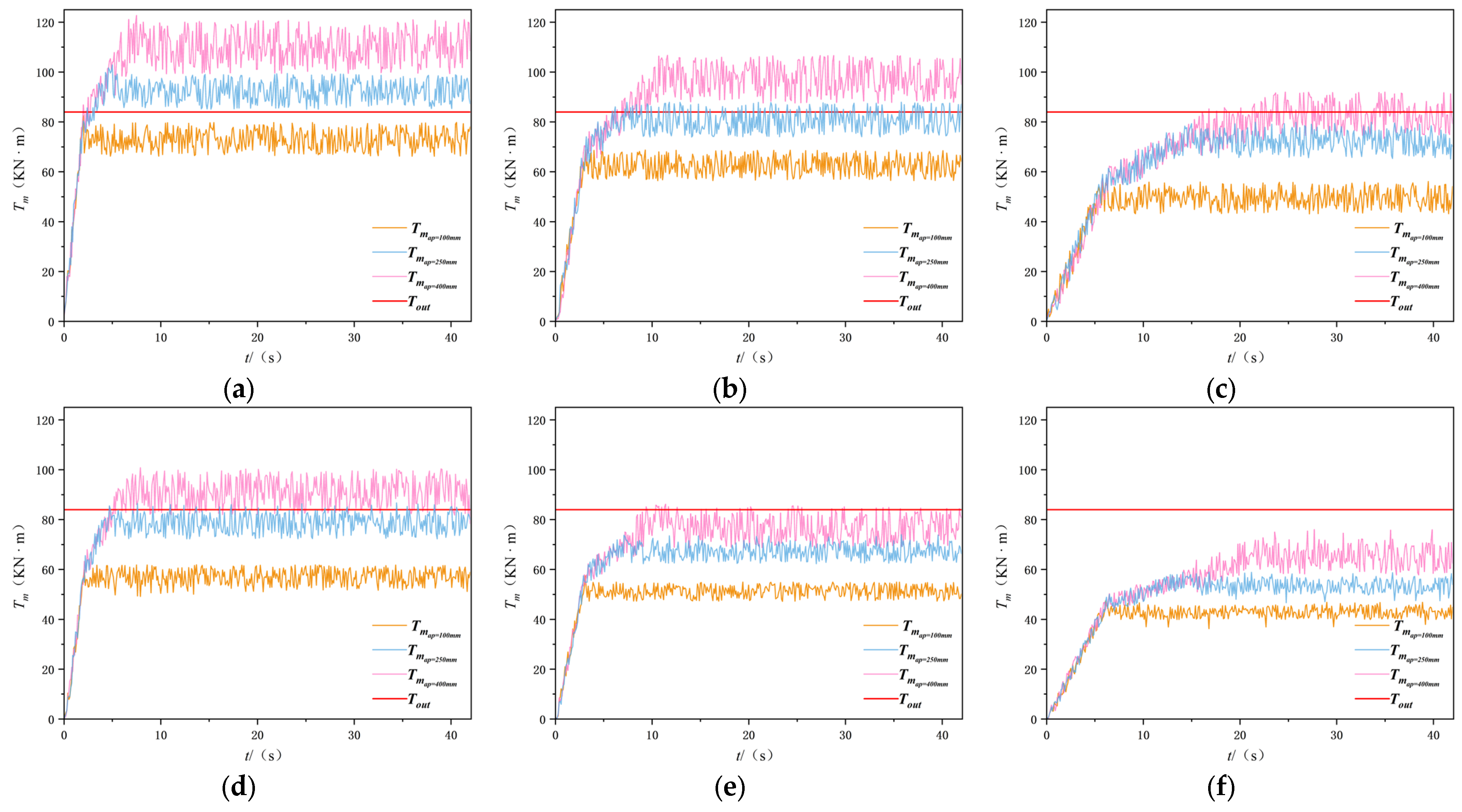
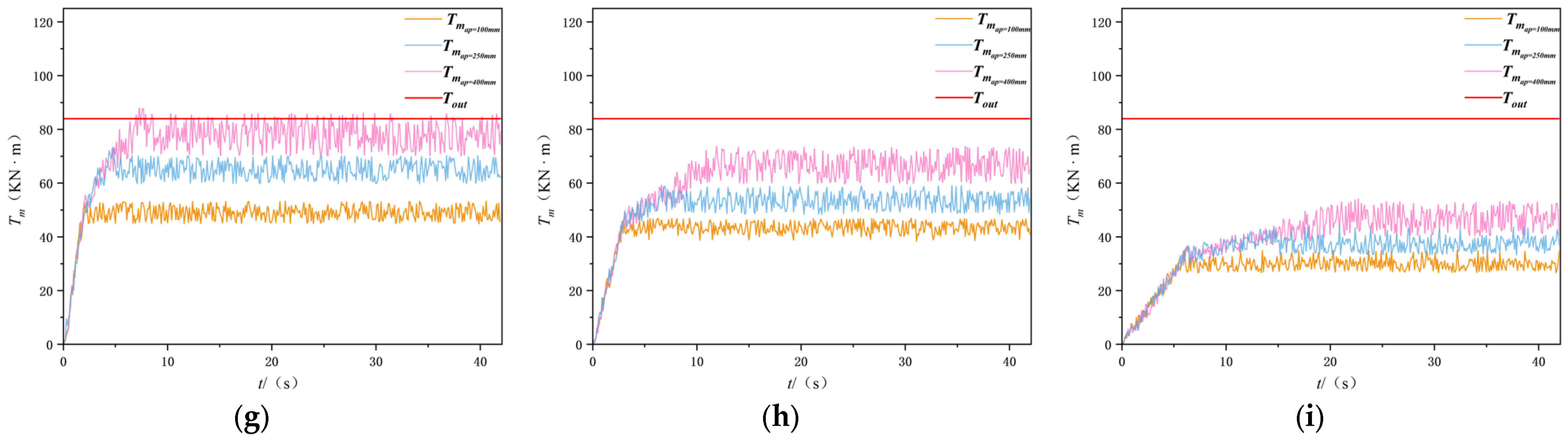
- Tm—Load torque acting on the cutting drum during the cutting of surrounding rock;
- P—Driving power required by the cutting drum;
- ap—Theoretical cutting depth range for the cutting drum when cutting surrounding rocks of varying hardness.
- —Average cutting thickness (in meters);
- vbmax—Maximum cutting velocity of the drum;
- n—Rotational speed of the cutting drum;
- Nj—Number of cutting teeth on the cutting drum located on the same cutting line;
- —Average cutting resistance encountered in the coal seam (in KN/m);
- f—Coal–rock firmness coefficient;
- KTN—Shape coefficient of cutting teeth, ranging from 1.5 to 2.5 for spade teeth and 1.1 to 1.5 for radial teeth;
- KS—Combined action coefficient of the cutting teeth, typically ranging between 0.7 and 0.9;
- KSN—Stress state coefficient of coal and rock, commonly assumed to be 1;
- —Friction coefficient between cutting teeth and coal–rock interface, typically μ = 0.3;
- KN—Radial force influence coefficient on blunt teeth, with a typical value of 0.5;
- Kn—Ratio of traction force to cutting force, typically 0.6 for brittle coal and 0.7 for viscous coal;
- q—Actual number of cutting teeth engaged in the rock, expressed as q = q0e/(πDₒp);
- q0—The total number of cutting teeth potentially engaging the rock, given a tooth thickness of a and a maximum cutting depth of e;
- Kp—Load factor of the drum’s drive system;
- —Mechanical transmission efficiency;
- Kap—Fluctuation coefficient of the cutting force, which exhibits a positive correlation with the rock strength coefficient.
5.2. Simulation Modeling of Cutting Robot Dynamics
- (1)
- For vb = 3 m/min, the maximum cutting depths for f5, f3, and f2 rocks are 117 mm, 188 mm, and 359 mm, respectively;
- (2)
- For vb = 2 m/min, the maximum depths increase to 148 mm, 411 mm, and 438 mm, respectively;
- (3)
- For vb = 1 m/min, the maximum depths are 210 mm, 418 mm, and 500 mm, respectively.
- Pc—Roof pressure (in Newtons, N);
- k1—Dynamic pressure coefficient;
- k2—Coefficient of roof sag and rib spalling;
- γZ—Density of the immediate roof rock (in g/mm3);
- γL—Density of the main roof rock (in g/mm3);
- Lk—Unsupported roof span (in mm);
- L0—Initial pressure step span of the main roof (in mm);
- h′—Thickness of the immediate roof strata (in mm);
- D′—Thickness of the main roof strata (in mm).
- (4)
- Coal–coal: restitution coefficient = 0.5, static friction coefficient = 0.5, dynamic friction coefficient = 0.01;
- (5)
- Coal–drum: restitution coefficient = 0.5, static friction coefficient = 0.45, dynamic friction coefficient = 0.01.
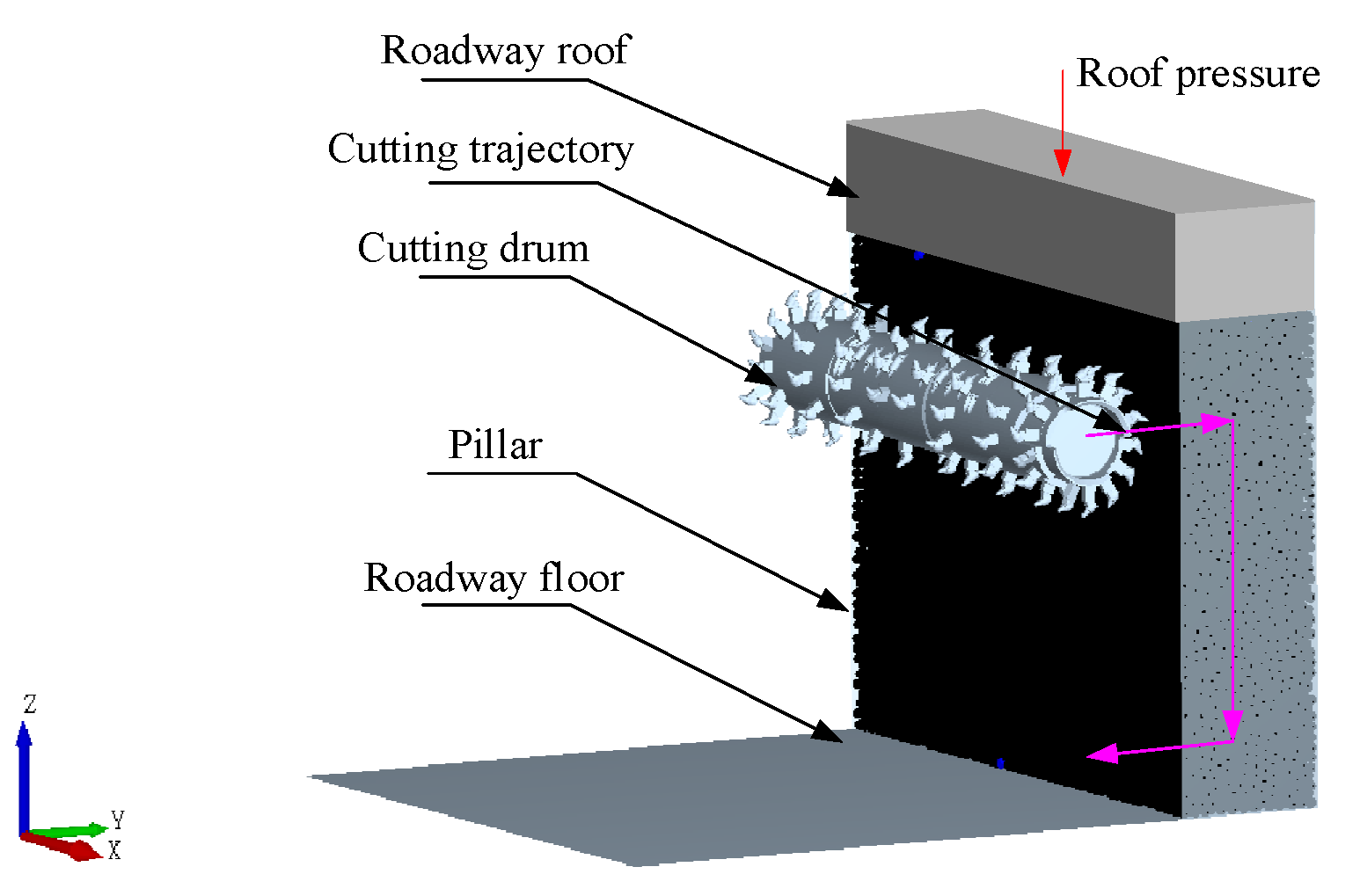
5.3. Dynamic Simulation Analysis of a Cutting Robot
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, S.M.; Liu, L.; Zhu, M.B.; Shen, Y.J.; Shi, Q.M.; Sun, Q.; Fang, Z.Y.; Ruan, S.S.; He, W.; Yang, P.; et al. New way for green and low-carbon development of coal industry under the target of “dual-carbon”. J. China Coal Soc. 2024, 49, 152–171. [Google Scholar] [CrossRef]
- Wang, S.M.; Liu, L.; Zhu, M.B.; Wei, B.N.; Zhuang, D.D.; Qu, H.S.; He, W.; Shao, C.C.; Xia, L.; Zhou, J. Scientific problems and technology of the integration of “excavation-backfill-retention” of section coal pillar and mining roadway. J. China Coal Soc. 2024, 49, 3291–3315. [Google Scholar] [CrossRef]
- Ralston, J.C.; Hargrave, C.O.; Dunn, M.T. Longwall automation: Trends, challenges and opportunities. Int. J. Min. Sci. Technol. 2017, 27, 733–739. [Google Scholar] [CrossRef]
- Wang, B.K. Current status and trend analysis of roadway driving technology and equipment in coal mine. Coal Sci. Technol. 2020, 48, 1–11. [Google Scholar] [CrossRef]
- Yang, J.J.; Zhang, Q.; Wang, C.; Chang, B.S.; Wang, F.; Wang, X.L.; Wu, M. Status and development of robotization research on roadheader for coal mines. J. China Coal Soc. 2020, 45, 2995–3005. [Google Scholar] [CrossRef]
- Zhang, Y.L.; Wang, B.K.; Zhang, X.F.; Li, Q.F. Forty years’development and future prospect on mechanized short-wall mining technology with continuous miner in China. J. China Coal Soc. 2021, 46, 86–99. [Google Scholar] [CrossRef]
- Ma, J.G. Research on development status of short-wall mechanized mining technology of continuous miner. Coal Sci. Technol. 2020, 48, 180–188. [Google Scholar] [CrossRef]
- Kang, H.P.; Jiang, P.F.; Wang, Z.Y.; Zhang, X.F.; Liu, C.; Luo, C.; Wei, R.Z.; Guo, J.C.; Chen, Z.L.; Wang, R.; et al. Coal roadway rapid driving technology and equipment with integrated drilling and anchoring and its application. J. China Coal Soc. 2024, 49, 131–151. [Google Scholar] [CrossRef]
- Ma, H.W.; Wang, S.B.; Mao, Q.H.; Shi, Z.W.; Zhang, X.H.; Yang, Z.; Cao, X.G.; Xue, X.S.; Xia, J.; Wang, C.W. Key common technology of intelligent heading in coal mine roadway. J. China Coal Soc. 2021, 46, 310–320. [Google Scholar] [CrossRef]
- Xue, L.M.; Ma, H.W.; Wang, C.W.; Zhang, H. Cutting ability of cutting robot in shield intelligent tunneling system. J. Xi’an Univ. Sci. Technol. 2023, 43, 779–786. [Google Scholar] [CrossRef]
- Hu, J. Analysis of the mining process of a double-stage rocker single-drum shortwall coal miner. Coal Technol. 2023, 42, 232–234. [Google Scholar] [CrossRef]
- Kang, H.P.; Xu, G.; Wang, B.M.; Wu, Y.Z.; Jiang, P.F.; Pan, J.F.; Ren, H.W.; Zhang, Y.J.; Pang, Y.H. Forty years development and prospects of underground coal mining and strata control technologies in China. J. Min. Strat. Control Eng. 2019, 1, 013501. [Google Scholar] [CrossRef]
- Sun, Z.L.; Wang, K.F.; Gu, P.H. Review and prospect for design theory and methodology research. J. Mech. Eng. 2024, 60, 2–20. [Google Scholar]
- Bao, H.; Gao, Y.F.; Wan, C.; Liu, Z.F.; Zhu, L.B.; Wang, Z. Interactive design and knowledge transfer research of product easy disassembly for multi−stage recycling needs. J. Mech. Eng. 2024, 60, 257–267. [Google Scholar]
- Ma, H.W.; Wang, J.K.; Wang, C.W. Fuzzy evaluation method of modular variable weight for temporary supporting device in coal mine roadway. J. Xi’an Univ. Sci. Technol. 2023, 43, 576–585. [Google Scholar]
- Yuan, S.Z.; Gao, H.N.; Wang, W.; Qu, Y.; Liu, X.W.; Li, K. Multi−image evaluation for human-machine interface based on Kansei engineering. Chin. J. Eng. Des. 2017, 24, 523–529. [Google Scholar]
- Janjua, A.N.; Shaefer, M.; Amini, S.H.; Noble, A.; Shahab, S. Vibrational energy transmission in underground continuous mining: Dynamic characteristics and experimental research of field data. Appl. Energy 2024, 354. [Google Scholar] [CrossRef]
- Aarts, E.; Lenstra, J.K. Local Search in Combinatorial Optimization, 1st ed.; Princeton University Press: Princeton, NJ, USA, 1997; pp. 15–78. [Google Scholar]
- Deb, K. Multi−Objective Optimization Using Evolutionary Algorithms, 1st ed.; Wiley: Chichester, UK, 2001; pp. 203–256. [Google Scholar]
- Craig, J.J. Introduction to Robotics: Mechanics and Control, 3rd ed.; Pearson: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Beer, F.P.; Johnston, E.R. Vector Mechanics for Engineers: Dynamics, 12th ed.; McGraw-Hill: New York, NY, USA, 2019; pp. 210–235. [Google Scholar]
- Meriam, J.L.; Kraige, L.G. Engineering Mechanics: Dynamics, 7th ed.; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- Ma, H.; Xue, L.; Wang, C.; Cui, W. Research on the cutting control method of a shield-type cutting robot. Actuators 2024, 13, 490. [Google Scholar] [CrossRef]
- Li, G.X. Dynamic parameters of roadheader and physical and mechanical properties of coal and rock. J. China Coal Soc. 1993, 4, 71–77. [Google Scholar]
- Wei, J.; Wu, M. Modern Coal Roadheader in China; Coal Industry Press: Beijing, China, 2015; pp. 190–219. [Google Scholar]
- Chen, H.Y.; Hai, Q.H.; Wang, C.G.; Zhang, D.S. Simulation and analysis of cutting performance of windlass excavator’s drum under different working conditions. Mech. Des. 2023, 40, 45–53. [Google Scholar] [CrossRef]
- Wang, J.H. Development and prospect on fully mechanized mining in Chinese coal mines. Int. J. Coal Sci. Technol. 2014, 1, 153–160. [Google Scholar] [CrossRef]
- Wang, J.H.; Yu, B.; Kang, H.P.; Wang, G.; Mao, D.; Liang, Y.; Jiang, P. Key technologies and equipment for a fully mechanized top-coal caving operation with a large mining height at ultra-thick coal seams. Int. J. Coal Sci. Technol. 2015, 2, 97–101. [Google Scholar] [CrossRef]
- Zhao, L.J.; Wen, S.J.; Liu, X.N. The influence of simulated particle radius on complex coal seam of drum cutting. Mech. Sci. Technol. Aerosp. Eng. 2020, 39, 52–57. [Google Scholar] [CrossRef]
- Su, O.; Akcin, N.A. Numerical simulation of rock cutting using the discrete element method. Int. J. Rock Mech. Min. Sci. 2011, 48, 434–442. [Google Scholar] [CrossRef]
- Zhao, L.J.; Wang, Y.D.; Zhang, M.C.; Jin, X.; Liu, H.M. Research on self-adaptive cutting control strategy of shearer in complex coal seam. J. China Coal Soc. 2022, 47, 541–563. [Google Scholar] [CrossRef]
- Mao, J.; Liu, X.Y.; Chen, H.Y.; Song, Q.S. Simulation research of shearer drum cutting performance based on EDEM. J. China Coal Soc. 2017, 42, 1069–1077. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mining Equipment | Auxiliary Equipment | Transportation Method | Mining Height | Mining Width | Main Shortcomings |
|---|---|---|---|---|---|
| Real mining machine | Shuttle car, temporary support equipment, drilling platform, etc. | Shuttle car, transfer system | ≤6 m | ≤7.7 m | Limited mining width |
| Rapid tunneling system | Temporary support equipment, drilling equipment, etc. | Built-in transportation system, transfer system | ≤8.8 m | ≤7.5 m | Limited mining width |
| Longwall mining machine | Scraper conveyor | Scraper conveyor, transfer system | ≤5.1 m | Shortwall panel length | Mining causes boundary coal losses |
| Continuous miner | Scraper conveyor | Scraper conveyor, transfer system | ≤2 m | Shortwall panel length | Low mining height |
| Serial No. | Cutting Method | Mobility Method | Transportation Method | Working Face Advancement Method |
|---|---|---|---|---|
| 1 | Vertical-axis type | Crawler type | Built-in loading mechanism + scraper conveyor | Hydraulic support advancement |
| 2 | Short horizontal-axis type | Slider shoe type | Coal loader mechanism + scraper conveyor | |
| 3 | Long horizontal-axis type | Push–pull type | Shuttle car + transfer machine | Autonomous advancement |
| 4 | Single oscillating pick drum | Wheel type | Built-in loading mechanism + transfer machine |
| i−1 | i | αi−1 | ai−1 | θi | di |
|---|---|---|---|---|---|
| 0 | 1 | π/2 | 0 | −π/2 | 480~(480 + C) |
| 1 | 2 | −π/2 | 500 | (−π/2) − θ2, (−π/2) + θ1 | 0 |
| 2 | 3 | 0 | 3000 | θ3 | 0 |
| Number | f | N (RPM) | vb (m/min) | ap/mm |
|---|---|---|---|---|
| 1 | f5, f3, f2 | 30 | 3 | 100 |
| 200 | ||||
| 400 | ||||
| 2 | f5, f3, f2 | 30 | 2 | 100 |
| 200 | ||||
| 400 | ||||
| 3 | f5, f3, f2 | 30 | 1 | 100 |
| 200 | ||||
| 400 |
| Material | Porosity | Elastic Modulus (MPa) | Density (kg/m3) |
|---|---|---|---|
| f1 coal | 0.27 | 1810 | 1953 |
| f2 coal | 0.30 | 3327 | 2056 |
| f3 coal | 0.26 | 5273 | 2208 |
| Steel | 0.31 | 7 × 104 | 7800 |
| Particle Bonding Parameters | f1 Coal | f2 Coal | f3 Coal |
|---|---|---|---|
| Normal stiffness per unit area (10⁸ N/m3) | 1.1482 | 1.2853 | 1.4028 |
| Shear stiffness per unit area (10⁸ N/m3) | 8.5414 | 9.9457 | 11.1960 |
| Normal stress per unit area (MPa) | 7.8592 | 10.2540 | 13.9510 |
| Shear stress per unit area (MPa) | 6.9217 | 7.0152 | 7.2548 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, H.; Cui, W.; Wang, C.; Xue, X.; Mao, Q.; Wang, H.; Xue, L.; Su, H.; Yu, Z.; Cheng, J.; et al. Modeling and Analysis of a Cutting Robot for the “Excavation–Backfill–Retention” Integrated Mining and Excavation Equipment. Actuators 2025, 14, 175. https://doi.org/10.3390/act14040175
Ma H, Cui W, Wang C, Xue X, Mao Q, Wang H, Xue L, Su H, Yu Z, Cheng J, et al. Modeling and Analysis of a Cutting Robot for the “Excavation–Backfill–Retention” Integrated Mining and Excavation Equipment. Actuators. 2025; 14(4):175. https://doi.org/10.3390/act14040175
Chicago/Turabian StyleMa, Hongwei, Wenda Cui, Chuanwei Wang, Xusheng Xue, Qinghua Mao, Haotian Wang, Limeng Xue, Hao Su, Zukun Yu, Jiashuai Cheng, and et al. 2025. "Modeling and Analysis of a Cutting Robot for the “Excavation–Backfill–Retention” Integrated Mining and Excavation Equipment" Actuators 14, no. 4: 175. https://doi.org/10.3390/act14040175
APA StyleMa, H., Cui, W., Wang, C., Xue, X., Mao, Q., Wang, H., Xue, L., Su, H., Yu, Z., Cheng, J., Guo, Y., & Ma, K. (2025). Modeling and Analysis of a Cutting Robot for the “Excavation–Backfill–Retention” Integrated Mining and Excavation Equipment. Actuators, 14(4), 175. https://doi.org/10.3390/act14040175