Abstract
This paper proposes an event-driven dynamic output feedback dissipative fuzzy (EDDOFDF) control strategy for direct current (DC) microgrids with nonlinear constant power loads (CPLs) subject to hybrid attacks and noises. Firstly, using the measurement output of the microgrid’s fuzzy model and information of hybrid attacks, a Zeno-free resilient event-triggered communication mechanism (RETM) is designed, which can save limited resources such as network bandwidth and actively exclude attack-induced packet dropouts. Secondly, by designing an EDDOFDF security controller, a closed-loop switched fuzzy system model is established, which presents a unified platform to study the impacts of hybrid attacks, RETM, noises, microgrid plant, and controllers. Thirdly, by introducing a piecewise Lyapunov functional, exponential stability conditions in mean square with guaranteed dissipative performance are obtained. Further, sufficient conditions for designing both the EDDOFDF controller and state-feedback switched fuzzy controller are derived. Examples illustrate the effectiveness of the proposed method.
1. Introduction
In recent years, growing concerns about the climate and the environment, coupled with a continuous increase in electricity demand, have driven the integration of more renewable energy-based distributed generation (DG) units into the power system [1].
A microgrid integrates local DG units, energy storage systems (ESSs), and loads to form a self-sufficient energy system, which can be classified into AC microgrids, DC microgrids, and hybrid AC/DC microgrids. AC microgrids are equipped with mature control and protection systems, but they face issues such as conversion efficiency, reactive power, synchronization, and harmonics. The hybrid AC/DC microgrid combines the advantages of both AC and DC microgrids [2], but typically features a complex architecture and still has the aforementioned issues of AC microgrids. Due to the simple architecture and the avoidance of AC microgrid-related issues, DC microgrids are drawing increasing attention [3]. In DC microgrids, power electronic converters operate as CPLs if precisely regulated. Although CPLs are widely prevalent in microgrids, their negative impedance feature can result in an underdamped or unstable oscillation. Therefore, a passive damping strategy is proposed by installing new hardware (e.g., resistor or capacitor) [4]. However, hardware addition is often difficult and costly in practice. By virtually adding components such as a capacitor or resistor to change the control loop [5], the active damping method is proposed. However, the active method only ensures small-signal stability, which motivates us to explore methods such as fuzzy control to obtain large-signal stability.
Due to the spatially distributed feature of microgrid components such as batteries and loads, network communication plays an increasing role in data transmission, which has advantages such as high flexibility and low cost. However, network-induced attacks, also called cyber attacks, pose a serious threat to microgrid safety [6]. For example, a DoS attack jams the communication network and data transmission becomes impossible, while an FDI attack generates fake data packets by injecting false data [7]. Thus, microgrid security control is attracting increasing attention. For example, for DC microgrids including nonlinear CPLs under time-constrained DoS attacks, the work in [8] presents a fuzzy switched control strategy and obtains exponential stability criteria by constructing time-varying Lyapunov functions. For DC microgrids with asynchronous DoS attacks, the work in [9] designs a security transmission scheme to update the control input in a timely manner and proposes a secure predictive controller for voltage control. For microgrids affected by random gain fluctuation and semi-aperiodic DoS attacks, the work in [10] designs an intermittent non-fragile estimator using partial measure information, and obtains stochastic stability criteria. For DC charging stations with CPLs, uncertainties, and DoS attacks, the work in [11] proposes a primary controller to guarantee stable voltage and presents a distributed consensus control method to ensure accurate current sharing. For DC microgrids containing distributed generation units (DGUs) subject to asynchronous DoS attacks, the work in [12] presents a prediction-based data security transmission method to compensate for attack-induced dropouts and designs a distributed predictive security controller to stabilize bus voltage. For DC microgrids with unknown input-based FDI attacks, the work in [13] studies the destructiveness and stealthiness of the attack from the attacker’s perspective and then designs an observer-based attack detector with plug-and-play performance. For FDI attacks affecting actuators in DC microgrids, the work in [14] proposes detection and mitigation strategies, where the estimate of actuator input is constructed by a linear functional observer when attacks are active, and a dynamic signature function is used to detect attacks. For DC microgrids subject to constant and bounded FDI attacks on local current sensors and communication networks, to guarantee voltage regulation and current sharing, the work in [15] presents a resilient distributed control method. To mitigate the impact of FDI attacks in DC microgrid clusters, using local microgrid information, the work in [16] provides a resilient cooperative control scheme based on Lyapunov theory, which can achieve power sharing and voltage regulation, and is robust to control parameters and modeling uncertainties. For DC microgrids with FDI attacks in communication and actuator channels, the work in [17] designs a dynamic, resilient consensus controller to ensure restoration of average voltage and proportional current sharing. From the adversary’s perspective, for DC microgrids using distributed secondary control, the work in [18] studies the optimal deployment of a zero-trace stealthy attack to maximize the state convergence error. For phase-locked loop (PLL) cyber attacks on inverter-dominated microgrids, the work in [19] shows that preemptive adjustment of lower droop gains in grid-forming inverters can mitigate the impacts caused by PLL attacks. Besides, phasor measurement units (PMUs) and phasor data concentrators (PDCs) can provide real-time high-precision synchronized data for the detection and mitigation of attacks [20,21], which provides an interesting future research direction that contributes to improving microgrid resilience. The works above propose some interesting security control methods assuming that the system resources are sufficient. However, in practice, system resources (e.g., node energy and network bandwidth) are often limited, which should be considered when designing the control strategy.
To save the aforementioned limited system resources, unlike the classical periodic sampling control method, an event-triggered control (ETC) method is designed, which executes control tasks only when the triggering conditions are met [22,23]. Due to the ETC’s advantage in consuming less system resources, it has been introduced in microgrid control. For example, to guarantee desired voltage and current performance in DC microgrids containing DGU, the work in [24] proposes a distributed secondary control method with a memory-based event-triggered mechanism and quantization. For DC microgrids with DGUs and communication networks subject to random packet losses, the work in [25] proposes a distributed ETC consensus protocol, which ensures current sharing and exhibits robustness to random dropouts. For DC microgrids containing DGU, a fixed-time distributed event-driven secondary control strategy is designed [26], which can ensure the required current sharing and voltage regulation within a fixed time. For DC microgrids with imperfect voltage sources, the work [27] designs an event-triggered distributed sliding mode controller to achieve power sharing and voltage regulation with low steady-state error and high convergence rate. To guarantee satisfactory power and voltage/frequency performance in hybrid microgrids with DGUs, the work in [28] presents a distributed model-free adaptive ETC method, and the asymptotic stability is analyzed using discrete Lyapunov theory. To ensure current sharing of the DC microgrid, the work in [29] presents a distributed event-driven differential delay method with adaptive droop coefficient regulation. For DC microgrids containing ESS, the work in [30] provides a secondary distributed control method by introducing a voltage-related factor to ensure bus voltage regulation, desired current sharing, and faster state-of-charge balancing, and proposes a consensus-based event-driven observer to ensure accurate average consensus using less communication resources. To improve reliability and efficiency of islanded DC microgrids containing ESS and renewable energy sources (RESs), the work [31] presents a distributed event-driven secondary control method, where maximum power algorithms and a fuzzy logic controller are designed to align the ESS power flow with the RES instantaneous power. The work in [32] presents a control strategy with multi-time scales for electric–hydrogen DC microgrids, where the control layer at the system level generates reference signals to ensure low-carbon operation and optimal power management, and local event-triggered sliding mode controllers drive converters to track optimal points. The works above present some ETC methods for microgrids, assuming that there exist no cyber attacks. However, in the presence of cyber attacks, especially hybrid attacks, these ETC methods are usually no longer effective. In addition, most of the above works adopt the state-feedback control strategy assuming that system states are measurable. However, system states are often unmeasurable in practice, making these methods ineffective.
To handle the aforementioned issues, this paper investigates output-based event-driven dissipative fuzzy control of DC microgrids with nonlinear CPLs, considering effects of hybrid attacks, RETM, and noises.
The main contributions are as follows. Firstly, using information on cyber attacks and measurement output of a microgrid’s fuzzy model, an RETM is designed which effectively reduces the consumption of limited network bandwidth and actively avoids attack-induced dropouts as well as Zeno behavior. Secondly, by designing an EDDOFDF controller with mismatching premises, a closed-loop switched fuzzy system model is established which contains parameters of system components and affects factors such as hybrid attacks. Thirdly, using the piecewise Lyapunov theory, considering both output-feedback and state-feedback scenarios, sufficient conditions for exponential stability in mean square satisfying dissipative performance are achieved, which provide a unified framework to study the quantitative impacts of system components and the influencing factors on system performance. Furthermore, using linear matrix inequality (LMI) technology to handle the nonlinear terms in stability criteria, design methods for the EDDOFDF controller as well as the state feedback controller are presented.
Notations. denotes column matrix while refers to the diagonal matrix. , , and indicate the maximum function, minimum function, and minimum eigenvalue, respectively. marks the mathematical expectation of the random variable. marks the Euclidean norm. I is identity matrix, and * marks the symmetric element in the symmetric matrix.
2. System Modelling for DC Microgrids
2.1. DC Microgrid
The DC microgrid in Figure 1 mainly contains N nonlinear CPLs and an ESS. Using the current/voltage information sampled by the sensors, the RETM releases data only when the triggering condition is satisfied. When transmitted in a communication network, the RETM’s released data is affected by intermittent DoS attacks and random FDI attacks. The EDDOFDF controller generates control signals that are used to adjust the injection current of the ESS. During network transmission, control signals are influenced by DoS attacks.

Figure 1.
DC microgrids with CPLs.
Remark 1.
As shown in Figure 1, taking into account the distributed characteristics of the microgrid system, there may exist communication networks between the microgrid and the controller. DoS attack can intermittently jam the communication network, and FDI attacks can randomly tamper with data packets. This paper mainly conducts theoretical research on designing the EDDOFDF controller to ensure microgrid stability, taking into account the influence of factors such as cyber attacks and RETM. In future research, the PMUs (or micro-PMUs) and PDCs can be utilized as sensors for real-time synchronized detection of microgrid information, providing high-quality data support for the microgrid control. In addition, real-time digital simulation (RTDS) can provide high-precision real-time simulations that closely align with the dynamic behavior of actual microgrids, which can be used as a rigorous simulation testing platform for the practical implementation of microgrid resilience control in the future.
Applying Kirchhoff’s laws to the CPL unit and the DC source in Figure 1, respectively, we have
where , , denote resistance, inductance, and capacitance in CPL, respectively. indicates the load power. , , indicate resistance, inductance, and capacitance in the DC source, respectively. refers to the DC voltage. , , , refer to the corresponding current and voltage, while indicates the steady state voltage of .
Denoting and , it follows from (3) that
where
Using the coordinate transformation to move the equilibrium point to the origin (i.e., ), it follows from (4) that
where , , ,
, , .
Remark 2.
As shown in Figure 1 and the microgrid model (1), the energy storage subsystem is modeled as the injection current , which is used as the control input in the microgrid model (1). By adjusting the injection current , the controller to be designed can stabilize the microgrid system under hybrid attacks. In addition, the DC source subsystem contains a constant voltage source and a -based filter.
Considering a CPL in the microgrid, we have . For , the following inequality holds
Using the sector-nonlinearity approach, it follows from (6) that
where .
2.2. Hybrid Attacks
First, consider intermittent DoS attacks as
where marks the sleeping interval, and and refer to the minimum and maximum sleeping interval, respectively. denotes the active interval, and marks the maximum active interval. Clearly, network communication is normal if , while network communication is blocked if . Considering the limitation of attack energy and the effectiveness of intrusion detection techniques [33], assume that the attack activation count satisfies , where , , and refers to the element number.
Then, FDI attack modifies the data to , with Bernoulli variable satisfying . To enhance attack stealthiness [34], is assumed for a given matrix H.
2.3. Event-Triggered Communication Mechanism
Using the attack information, design a RETM as
where matrix , the scalars , , marks the triggering instant in the sleeping interval of the DoS attack, and h is the sampling period.
In the sleeping interval of DoS attacks, the RETM (10) releases data only when satisfying its triggering condition, and thus it can reduce unnecessary consumption of system resources. The RETM is naturally Zeno-free, since the triggering intervals are no less than the sampling period. To reduce the damage induced by the just-ended attack-active interval , the RETM generates an event when the following attack-sleeping interval begins. If , the RETM does not generate an event, which excludes the packet loss induced by the attack. The trigger threshold adaptively varies with the state error . For example, when the system deviates from the equilibrium point, grows larger, and thus becomes smaller, which increases the triggering rate to facilitate system recovery.
Remark 3.
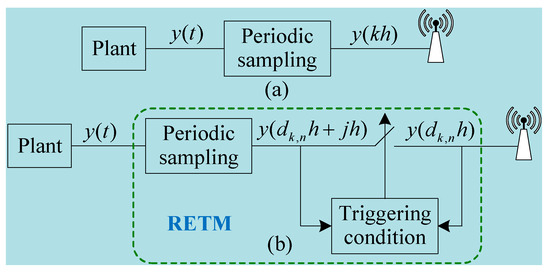
As shown in Figure 2(a), the classical periodic sampling communication mechanism (also called time-triggered communication) samples and transmits microgrid information using a fixed period h. As shown in Figure 2(b), the proposed RETM (also called event-driven communication) first periodically samples microgrid information, and then uses the current sampled value and the previously triggered value to determine whether the trigger condition (10) is met. If the condition is satisfied, the current sampled data will be transmitted to the controller via the network. Otherwise, the current sampled data will be discarded. Unlike the periodic sampling communication mechanism that transmits all sampled data, the RETM only sends sampled data that meets the triggering condition. The RETM can effectively reduce the data transmission rate, thus conserving limited system resources such as network bandwidth. However, under the RETM, the controller cannot periodically receive microgrid information, and thus the mature periodic sampling control theory cannot be directly applied to the controller design. In particular, under the influence of cyber attacks, the controller may fail to receive data or receive false data. Considering these factors, designing an EDDOFDF controller to ensure microgrid stability poses a challenge and represents the primary objective of this paper.
Figure 2.
Periodic sampling communication (a) and event-triggered communication (b).
2.4. Closed-Loop System Modelling
The triggering interval can be virtually divided as , where and . In the interval , define functions
Considering the impact of FDI attack, using (11), the released data is modified to
Using (12), design the EDDOFDF controller as
where are gain matrices satisfying , , , , and marks the attacked voltage signal.
Using (8) and (13), the closed-loop switched fuzzy system model is obtained as
where , , , , , , , , , .
Remark 4.
Many existing fuzzy control strategies assume that the controller can obtain full-state information of the plant, and design the fuzzy controller using the same premise variables as those of the plant [35,36]. In this paper, considering the effects of the ETM and cyber attacks in the plant-to-controller channel, the designed controller (13) employs premise variables different from those of the plant (8). Therefore, the membership functions of the fuzzy controller (13) differ from those of the plant (8). Furthermore, when jointly considering the compound impacts of the ETM, hybrid attacks, noises, and mismatching premise variables, the fuzzy controller design faces substantial difficulties.
3. System Stability and Dissipative Performance
3.1. Exponential Stability
Theorem 1.
Given hybrid attacks’ parameters , , , H, RETM parameter δ, sampling period h, scalars , , , and which ensure , if there are symmetric matrices , matrices ,, and positive definite matrices , satisfying
where
with
,
, , ,
, ,
, ,
,
then, the DC microgrid system (14) under hybrid attacks, RETM, noises, and mismatching premises is mean-square exponentially stable.
Proof.
Introduce a piecewise Lyapunov–Krasovskii functional (LKF) as
where and are positive definite matrices.
When , we have
where .
Denoting and , introduce zero-value terms and , and we have
Using the triggering condition and the FDI attack’s information, we have
Introducing the zero-value term , if (16) and (17) hold, we have . Using this inequality, one derives from (27) that
If , it follows from (22) that
where .
Introducing zero-value terms and , one can derive from (29) that
3.2. Dissipative Performance
Definition 1
([38]). If the following inequality holds under zero initial condition
then the system is strictly -dissipative, where , and matrices satisfy , .
Theorem 2.
For hybrid-attack parameters , , , H, RETM parameter δ, sampling period h, dissipative parameters , scalars , , , and which ensure , if there are symmetric matrices , matrices ,, and positive definite matrices , satisfying (19), (20) and
where
with
,
, , ,
, , , ,
, ,
, , ,
then the microgrid system (14) under hybrid attacks, RETM, noises, and premise mismatching is exponentially stable in mean square with strictly -dissipative performance.
Proof.
, , and
,
.
Denoting , , , and , we have
where , and is guaranteed by (20).
Using (47), one has
where . □
Specially, if system state is measurable, the microgrid model (8) becomes
During sleeping intervals of DoS attacks, the RETM’s released data is modified by FDI attacks as
where .
Design the switched state-feedback fuzzy controller as
Corollary 1.
For hybrid-attack parameters , , , H, RETM parameter δ, sampling period h, dissipative parameters , scalars , , , and which ensure , if there are symmetric matrices , matrices ,, and positive definite matrices , satisfying (19), (20) and
where
with
,
, ,
, , , ,
, ,
, , ,
then the microgrid system (52) under hybrid attacks, RETM, noises, and premise mismatching is exponentially stable in mean square and strictly -dissipative.
Proof.
Using the LKF (22), defining and , the proof, similar to that of Theorem 2, is omitted. □
4. Controller Design
Lemma 1
([39]). Given a full-column-rank matrix , its singular value decomposition can be expressed as with unitary matrices , , and diagonal matrix containing nonzero singular values of B in descending order. Then, holds for symmetric matrices and , where , .
Theorem 3.
For hybrid-attack parameters , , , H, RETM parameter δ, sampling period h, dissipative parameters , scalars , , , and which ensure , if there are symmetric matrices , matrices , , and positive definite matrices , satisfying
where
with
,
, , ,
, , , ,
, ,
, , ,
, , ,
, , ,
, , ,
Proof.
Define matrices
where , , .
Defining , , using to pre- and post-multiply and in Theorem 2, we have
where
,
,
,
.
Using Lemma 1 to handle the coupled term , one has
Using Lemma 2 in [34] to handle the coupled terms and , one has
Remark 5.
As shown in Figure 1, unlike the droop control, the DC source operates in constant voltage mode, and this article focuses on designing the EDDOFDF controller (13) to ensure system stability by taking into account the impacts of factors such as hybrid attacks, RETM, and noise. In addition, small-signal stability analysis, especially with low droop gain, is insufficient to ensure the microgrid’s resilient operation, because it does not account for the dynamic, nonlinear, and often unpredictable nature of cyber attacks [19]. Thus, the fuzzy controller (13) is designed with the objective of stabilizing the microgrid in the large signal sense.
Using LMI technology to handle the coupling terms in Corollary 1, sufficient conditions are obtained for designing the state feedback controller (51) as follows.
Corollary 2.
For hybrid-attack parameters , , , H, RETM parameter δ, sampling period h, dissipative parameters , scalars , , , and which ensure , if there are symmetric matrices , matrices , and positive definite matrices , satisfying (20) and
where
with
,
, ,
, , , ,
, ,
,
, , , ,
, , ,
Proof.
Define
Similar to the proof of Theorem 3, using to handle the coupled terms in Corollary 1, Corollary 2 can be obtained. □
5. Case Study
Using the MATLAB R2021a M-files, the simulation programs are developed, which mainly include an LMI solving program and a main program for system operation. As shown in Figure 3, using the LMI solving program based on Theorem 3, the gain matrices () of the EDDOFDF controller (13) can be obtained. In the main program for system operation, the closed-loop system model (14) generates system dynamics, the event-triggered condition (10) determines data transmission, impacts of DoS and FDI attacks are taken into account, control signals are updated with received data, the system model (14) is refined by introducing updated control signals, and this cycle iterates until simulation time is up.
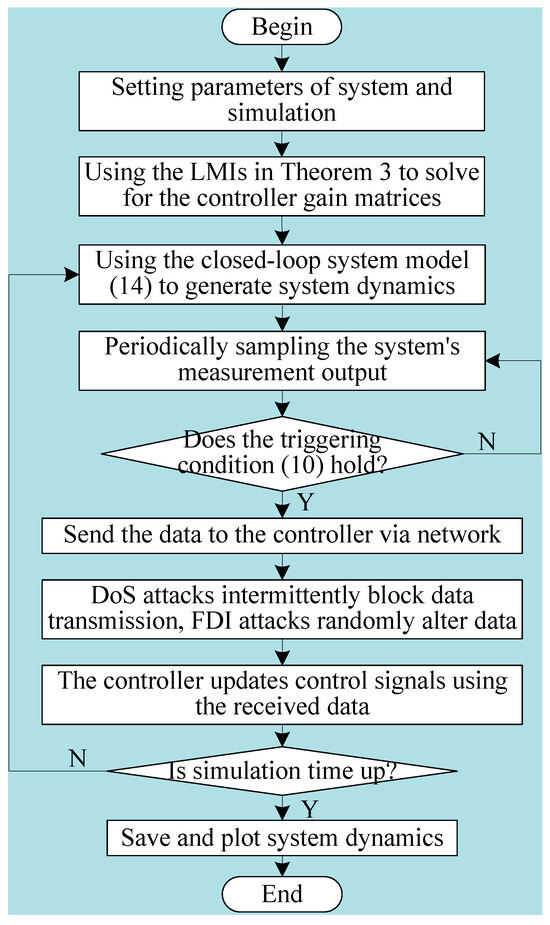
Figure 3.
Program flowchart in Matlab.
Use the DC microgrid in Figure 1 with one CPL (i.e., ) for example. The CPL subsystem’s parameters include , , , constant load power , and steady-state voltage V. The DC source subsystem’s parameters contain , mH, , and constant voltage source V. System parameters are presented as follows: DoS attack parameters FDI attack parameters , DETM parameters , noise signal , dissipative parameters , premise-related parameters , sampling period , gain matrices , , , and scalars , .
Using Theorem 3, parameters of the EDDOFDF controller (13) and RETM (10) are simultaneously obtained as
Figure 4 shows the state response of the microgrid, where the gray bands indicate active intervals of DoS attacks and the white bands denote sleeping intervals of DoS attacks. As shown in Figure 4, under the action of the designed EDDOFDF controller, the microgrid system can reach the equilibrium state. Namely, although the microgrid system is simultaneously affected by hybrid attacks, RETM, and noise, the designed controller can still stabilize it. For example, the voltage finally reaches its equilibrium point V. The control input (i.e., injection current ) of the microgrid system is shown in Figure 5. During active intervals of DoS attacks, control signals are blocked, and thus the injection current becomes zero. During sleeping intervals of DoS attacks, control signals can successfully arrive at the microgrid, and thus the injection current works well.
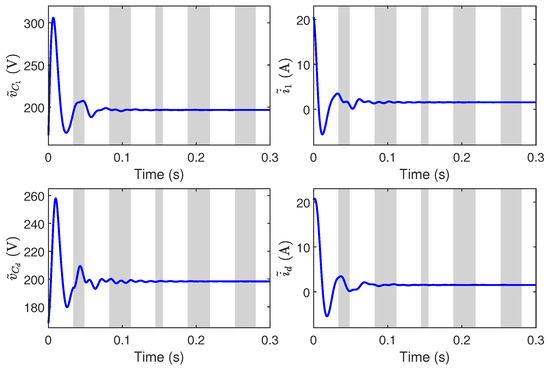
Figure 4.
State response of the DC microgrid.

Figure 5.
The injection current.
The triggering performance of the RETM is shown in Figure 6. During sleeping intervals of DoS attacks, the triggering rate of the RETM is , saving of communication resources. At the beginning of each attack-sleeping interval (e.g., s, s, s, s, s), an event is triggered immediately to transmit sampled data, which helps compensate for the damage caused by the just-ending attack-active interval. As shown in the detail view, the triggering intervals of the RETM are no less than the sampling period ms, and thus Zeno behavior is excluded. During active intervals of DoS attacks, the RETM does not trigger (i.e., no data is transmitted), which excludes the attack-induced dropout phenomenon.
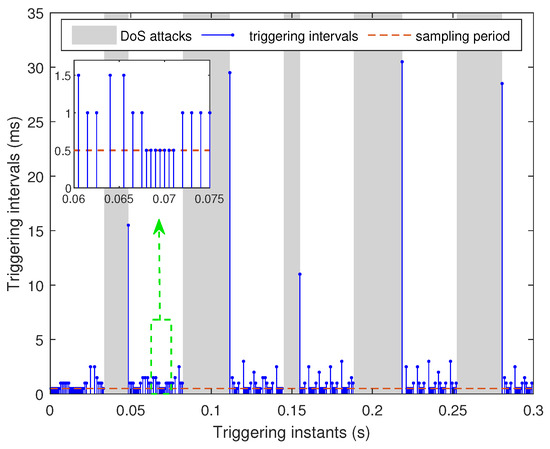
Figure 6.
Triggering characteristics of the RETM.
The activation time of DoS/FDI attacks is shown in Figure 7. Using the sampling period ms, measurement output of the microgrid is first periodically sampled. Among these periodically sampled data, the RETM releases 230 data packets during sleeping intervals of DoS attacks. Among the data released by the RETM, 30 data packets are maliciously tampered with by FDI attacks, which implies that the attack rate is . Although the microgrid is affected by factors including DoS/FDI attacks, RETM, and noise, the proposed control strategy can still achieve satisfactory control performance while utilizing fewer communication resources.
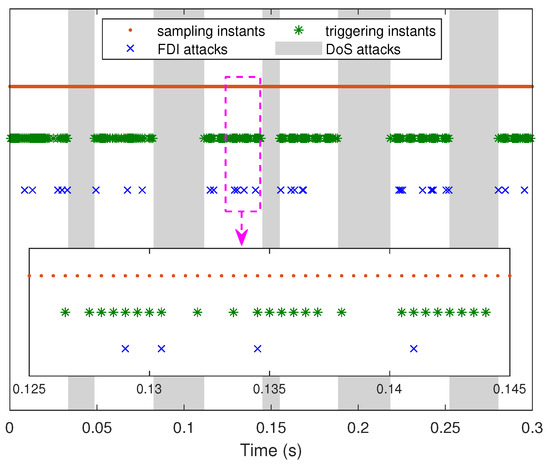
Figure 7.
Sampling instants, triggering instants and attacking instants.
6. Conclusions
The paper proposes an EDDOFDF control strategy for DC microgrids with nonlinear CPLs, taking effects of DoS and FDI attacks, RETM, and noises into consideration. First, using information of attacks and measurement output of the microgrid’s fuzzy model, an RETM is proposed to reduce unnecessary consumption of limited resources such as network bandwidth, which naturally excludes Zeno behavior and attack-induced packet dropouts. Second, considering the effects of hybrid attacks, RETM, and noise, and designing an EDDOFDF controller with mismatching premises, a unified closed-loop switched fuzzy system model is established. Third, by employing piecewise Lyapunov theory, exponential stability criteria in mean square with guaranteed dissipative performance are obtained, which present a platform to study the affecting factors’ quantitative impacts on system stability. Further, using LMI techniques to handle the coupled terms in stability criteria, sufficient conditions are obtained for designing the EDDOFDF controller, as well as the state-feedback switched fuzzy controller. The example shows that even if the microgrid is affected by many factors such as hybrid attacks, RETM, and noise, the designed EDDOFDF controller can still achieve satisfactory control performance. Meanwhile, the proposed RETM effectively reduces the data transmission rate to , which also excludes attack-induced dropouts and Zeno behavior phenomenon. Future research directions could focus on designing a resilient controller for hybrid AC/DC microgrids subject to complex attacks, developing artificial intelligence-based methods for detecting and mitigating cyber attacks in microgrids, and practically implementing microgrid control strategies using advanced devices such as PMUs, PDCs, and RTDS.
Author Contributions
Conceptualization, F.L. and L.G.; methodology, F.L., Z.L. and L.G.; validation, Z.L. and L.G.; formal analysis, Z.L. and L.G.; writing—original draft preparation, F.L., Z.L. and L.G.; writing—review and editing, F.L., Z.L., L.G. and C.P.; supervision, F.L., L.G. and C.P.; project administration, F.L. and L.G.; funding acquisition, F.L. and C.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China grant number 61703146, 62173218; Science and Technology Project in Henan Province grant number 232102110268, 252102211077.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Shi, W.; Lv, X.; He, Y. Distributed Event-Triggered Optimal Algorithm Designs for Economic Dispatching of DC Microgrid with Conventional and Renewable Generators: Actuator-Based Control and Optimization. Actuators 2024, 13, 290. [Google Scholar] [CrossRef]
- Liang, Z.; Chung, C.Y.; Zhang, W.; Wang, Q.; Lin, W.; Wang, C. Enabling High-Efficiency Economic Dispatch of Hybrid AC/DC Networked Microgrids: Steady-State Convex Bi-Directional Converter Models. IEEE Trans. Smart Grid 2025, 16, 45–61. [Google Scholar] [CrossRef]
- Montoya, O.D.; Serra, F.M.; Gil-Gonzalez, W.; Asensio, E.M.; Bosso, J.E. An IDA-PBC Design with Integral Action for Output Voltage Regulation in an Interleaved Boost Converter for DC Microgrid Applications. Actuators 2022, 11, 5. [Google Scholar] [CrossRef]
- Hassan, M.A.; Su, C.L.; Pou, J.; Almakhles, D.; Zhan, T.S.; Lo, K.Y. Robust Passivity-Based Control for Interleaved Bidirectional DC-DC Power Converter with Constant Power Loads in DC Shipboard Microgrid. IEEE Trans. Transp. Electrif. 2024, 10, 3590–3602. [Google Scholar] [CrossRef]
- Yu, H.; Zhang, H.; Zhang, Q.; Wang, Y.; Qin, Z.; Chen, Z.; Bauer, P. A Virtual Impedance-Based Active Damping Control Strategy for Triple Active Bridge Converter. IEEE Trans. Ind. Electron. 2024, 71, 14220–14231. [Google Scholar] [CrossRef]
- Hassine, E.; Thabet, A.; Gasmi, N.; Frej, G.B.H. An Event-Triggered Observer-Based Control Approach for Enhancing Resilience of Cyber-Physical Systems Under Markovian Cyberattacks. Actuators 2025, 14, 412. [Google Scholar] [CrossRef]
- Li, Y.; Wu, Y.; Gao, Y.; Wei, M.; Hua, Z.; Chen, J. Attack Reconstruction and Attack-Resilient Consensus Control for Fuzzy Markovian Jump Multi-Agent Systems. Actuators 2024, 13, 442. [Google Scholar] [CrossRef]
- Yang, F.; Hu, S.; Xie, X.; Yue, D.; Sun, J. Resilient Fuzzy Control Synthesis of Nonlinear DC Microgrid via a Time-Constrained DoS Attack Model. IEEE Trans. Autom. Sci. Eng. 2024, 21, 5270–5279. [Google Scholar] [CrossRef]
- Li, T.; Wen, X.; Zhou, J.; Du, S.; Chen, B. Voltage control for DC microgrid under DoS attacks: A security predictive control approach. ISA Trans. 2025, 162, 179–186. [Google Scholar] [CrossRef]
- Ding, K.; Zhu, Q.; Huang, T. Partial-Information-Based Non-Fragile Intermittent Estimator for Microgrids with Semi-Aperiodic DoS Attacks: Gain Stochastic Float. IEEE Trans. Power Syst. 2024, 39, 2271–2283. [Google Scholar] [CrossRef]
- Tian, X.; Jiang, C.; Qian, B.; Wang, R. Current sharing control strategy with uncertainties and network attacks for electric vehicle charging station. IET Energy Syst. Integr. 2024, 6, 230–241. [Google Scholar] [CrossRef]
- Li, T.; Wen, X.; Chen, B.; Wang, Z. Distributed MPC-Based Constant Voltage Control for DC Microgrids Under DoS Attacks. IEEE Trans. Circuits Syst. II Express Briefs 2024, 71, 4266–4270. [Google Scholar] [CrossRef]
- Wu, Z.; Peng, C.; Tian, E.; Zhang, Y. Plug and Play Detector Design for DC Microgrids with Unknown-Inputs-Based FDI Attack. IEEE Trans. Smart Grid 2025, 16, 2052–2064. [Google Scholar] [CrossRef]
- Kachhwaha, M.; Modi, H.; Nehra, M.K.; Fulwani, D. Resilient Control of DC Microgrids Against Cyber Attacks: A Functional Observer Based Approach. IEEE Trans. Power Electron. 2024, 39, 459–468. [Google Scholar] [CrossRef]
- Liu, Q.; Liao, S.; Li, P.; Zhang, H. Resilient Control of DC Microgrids Against FDI Attacks on Communication Links and Local Current Measurements. IEEE Trans. Ind. Inform. 2024, 20, 10325–10333. [Google Scholar] [CrossRef]
- Tan, S.; Xie, P.; Guerrero, J.M.; Vasquez, J.C.; Alcala, J.M.; Carreno, J.E.M.; Guerrero-Zapata, M. Lyapunov-Based Resilient Cooperative Control for DC Microgrid Clusters Against False Data Injection Cyber-Attacks. IEEE Trans. Smart Grid 2024, 15, 3208–3222. [Google Scholar] [CrossRef]
- Tadepalli, P.S.; Pullaguram, D.; Alam, M.N. Resilient Dynamic Average Secondary Control for DC Microgrids Against FDI Attacks. IEEE Trans. Ind. Appl. 2025, 61, 5116–5127. [Google Scholar] [CrossRef]
- Liu, Q.; Zhao, C.; Liu, M.; Deng, R.; Cheng, P. Submodularity-Based False Data Injection Attack Strategy in DC Microgrids. IEEE Trans. Inf. Forensics Secur. 2025, 20, 2342–2356. [Google Scholar] [CrossRef]
- Kontou, A.; Syed, M.; Paspatis, A.; Feng, Z.; Konstantinou, C.; Hatziargyriou, N. Exploiting the Inherent Cyber Resilience of Inverter-Dominated Microgrids Against PLL Attack. IEEE Trans. Ind. Electron. 2025, 72, 1–6. [Google Scholar] [CrossRef]
- Darmis, O.; Korres, G.N.; Lagos, D.; Hatziargyriou, N.D. A Hardware-In-The-Loop Configuration for Real-Time Power System Monitoring. In Proceedings of the 2022 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Novi Sad, Serbia, 10–12 October 2022; pp. 1–5. [Google Scholar]
- Theodorakatos, N.P.; Babu, R.; Theodoridis, C.A.; Moschoudis, A.P. Mathematical Models for the Single-Channel and Multi-Channel PMU Allocation Problem and Their Solution Algorithms. Algorithms 2024, 17, 191. [Google Scholar] [CrossRef]
- Yang, H.; Peng, C.; Cao, Z. Attack-model-independent stabilization of networked control systems under a jump-like TOD scheduling protocol. Automatica 2023, 152, 110982. [Google Scholar] [CrossRef]
- Zhang, Y.; Dai, J.; Liu, Z.; Tang, R.; Zheng, G.; Wang, J. Fixed-Time Adaptive Event-Triggered Control for Uncertain Nonlinear Systems Under Full-State Constraints. Actuators 2025, 14, 231. [Google Scholar] [CrossRef]
- Qu, F.R.; Liu, Z.W.; Liu, X.K.; Wang, Y.W.; Tian, E.G. Memory-Based Event-Triggered Control for Distributed Secondary Control in DC Microgrids with Quantized Communication. IEEE Trans. Ind. Electron. 2024, 71, 14864–14874. [Google Scholar] [CrossRef]
- Jing, G.; Huang, B.; Xie, X.; Shen, Q.; Sun, Q. Distributed Event-Triggered Control for Current Sharing in DC Microgrid with Random Packet Losses. IEEE Trans. Ind. Inform. 2025, 21, 1537–1546. [Google Scholar] [CrossRef]
- Chai, J.; Wang, M.; Xu, Z. A Distributed Event-Triggered Fixed-Time Secondary Control for DC Microgrids Without Continuous Signal Transmission. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 5123–5138. [Google Scholar] [CrossRef]
- Liu, L.; Wang, Y.; Zhang, Z.; Zuo, Z. Event-Triggered Distributed Sliding Mode Control for DC Microgrids with Imperfect Sources. IEEE Trans. Ind. Inform. 2025, 21, 435–444. [Google Scholar] [CrossRef]
- Yang, C.; Zheng, T.; Bu, M.; Li, P.; Guerrero, J.M. Distributed Model-Free Adaptive Control Strategy for Hybrid AC/DC Microgrid with Event-Triggered Mechanism. IEEE Trans. Ind. Electron. 2024, 71, 9077–9086. [Google Scholar] [CrossRef]
- Deng, F.; Tang, Y.; Yao, Z.; Yao, W.; Lei, T.; Li, W.; Zhang, X. Event-Triggered Differential Delay Method for Current Sharing in Islanded DC Microgrids with Adaptive Droop Coefficient Regulation. IEEE Trans. Smart Grid 2025, 16, 863–875. [Google Scholar] [CrossRef]
- Huang, Z.; Li, Y.; Ke, M.; Deng, J. Distributed Secondary Control with an Event-Triggered Consensus-Based Observer for Energy Storage Systems in Islanded DC Microgrids. IEEE Trans. Sustain. Energy 2024, 15, 1167–1179. [Google Scholar] [CrossRef]
- Irmak, E.; Kabalci, E.; Calpbinici, A. Event-triggered distributed secondary control for enhancing efficiency, reliability and communication in island mode DC microgrids. IET Renew. Power Gener. 2024, 18, 78–94. [Google Scholar] [CrossRef]
- Armghan, H.; Xu, Y.; Sun, H.; Ali, N.; Liu, J. Event-triggered multi-time scale control and low carbon operation for electric-hydrogen DC microgrid. Appl. Energy 2024, 355, 122149. [Google Scholar] [CrossRef]
- Chen, X.; Hu, S.; Zhang, W.; Xie, X.; Yue, D. DoS-resilient time varying estimators and controllers co-design for NCSs under sensor and actuator attacks. IEEE Trans. Inf. Forensics Secur. 2025, 20, 7498–7511. [Google Scholar] [CrossRef]
- Li, F.; Li, K.; Peng, C.; Gao, L. Security control of direct current microgrids under deception attacks—A dynamic event-triggered approach. Asian J. Control. 2025, 27, 410–426. [Google Scholar] [CrossRef]
- Aslam, M.S.; Tiwari, P.; Pandey, H.M.; Band, S.S. Observer-Based Control for a New Stochastic Maximum Power Point Tracking for Photovoltaic Systems with Networked Control System. IEEE Trans. Fuzzy Syst. 2023, 31, 1870–1884. [Google Scholar] [CrossRef]
- Mardani, M.M.; Vafamand, N.; Khooban, M.H.; Dragievi, T.; Blaabjerg, F. Design of Quadratic D-Stable Fuzzy Controller for DC Microgrids with Multiple CPLs. IEEE Trans. Ind. Electron. 2019, 66, 4805–4812. [Google Scholar] [CrossRef]
- Yang, H.; Peng, C.; Cao, Z.; Zhang, X.M. A novel semantic-based multi-packet parallel transmission scheme for networked control systems. Automatica 2025, 174, 112120. [Google Scholar] [CrossRef]
- Feng, L.; Huang, B.; Zhang, H.; Sun, J. Dynamic event-triggered extended dissipative scaled consensus control for nonlinear multi-agent systems. Fuzzy Sets Syst. 2025, 506, 109286. [Google Scholar] [CrossRef]
- Zha, L.; Liao, R.; Liu, J.; Xie, X.; Tian, E.; Cao, J. Dynamic Event-Triggered Output Feedback Control for Networked Systems Subject to Multiple Cyber Attacks. IEEE Trans. Cybern. 2022, 52, 13800–13808. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).