

A New Dual Steering System in a Compact Tractor
 , , ,
, , ,  and
and
Abstract
1. Introduction
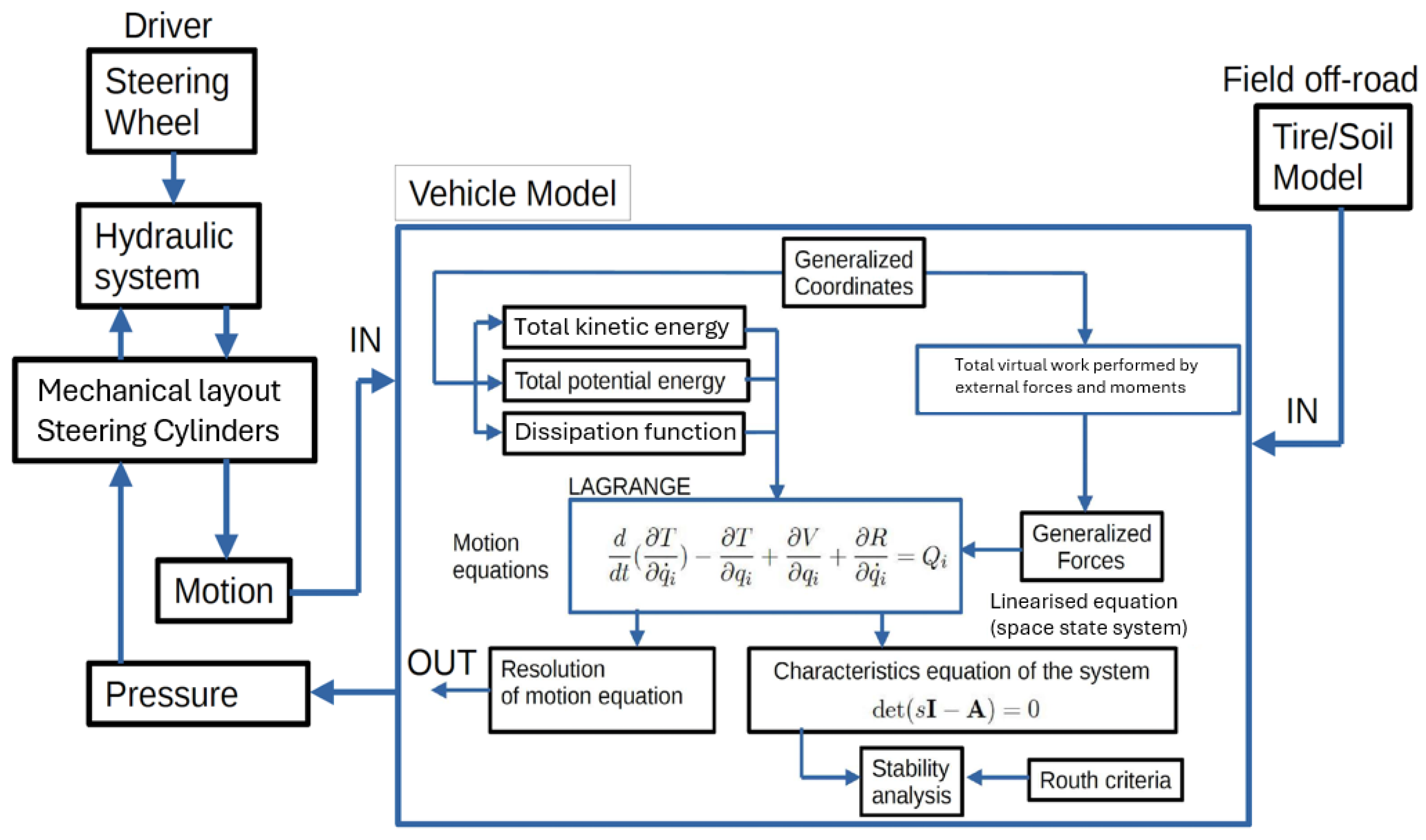
2. Methodologies
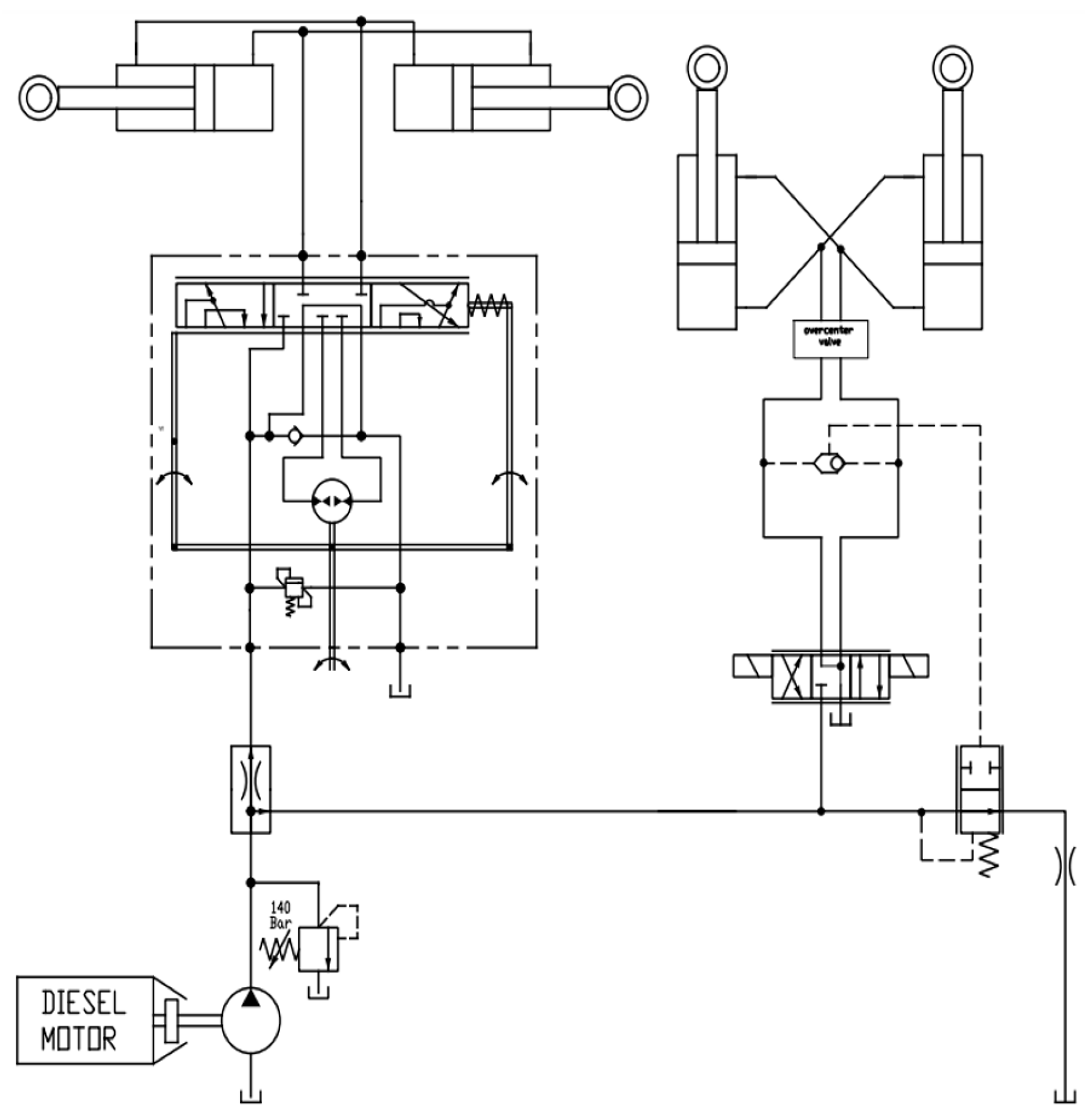
Hydraulic Domain
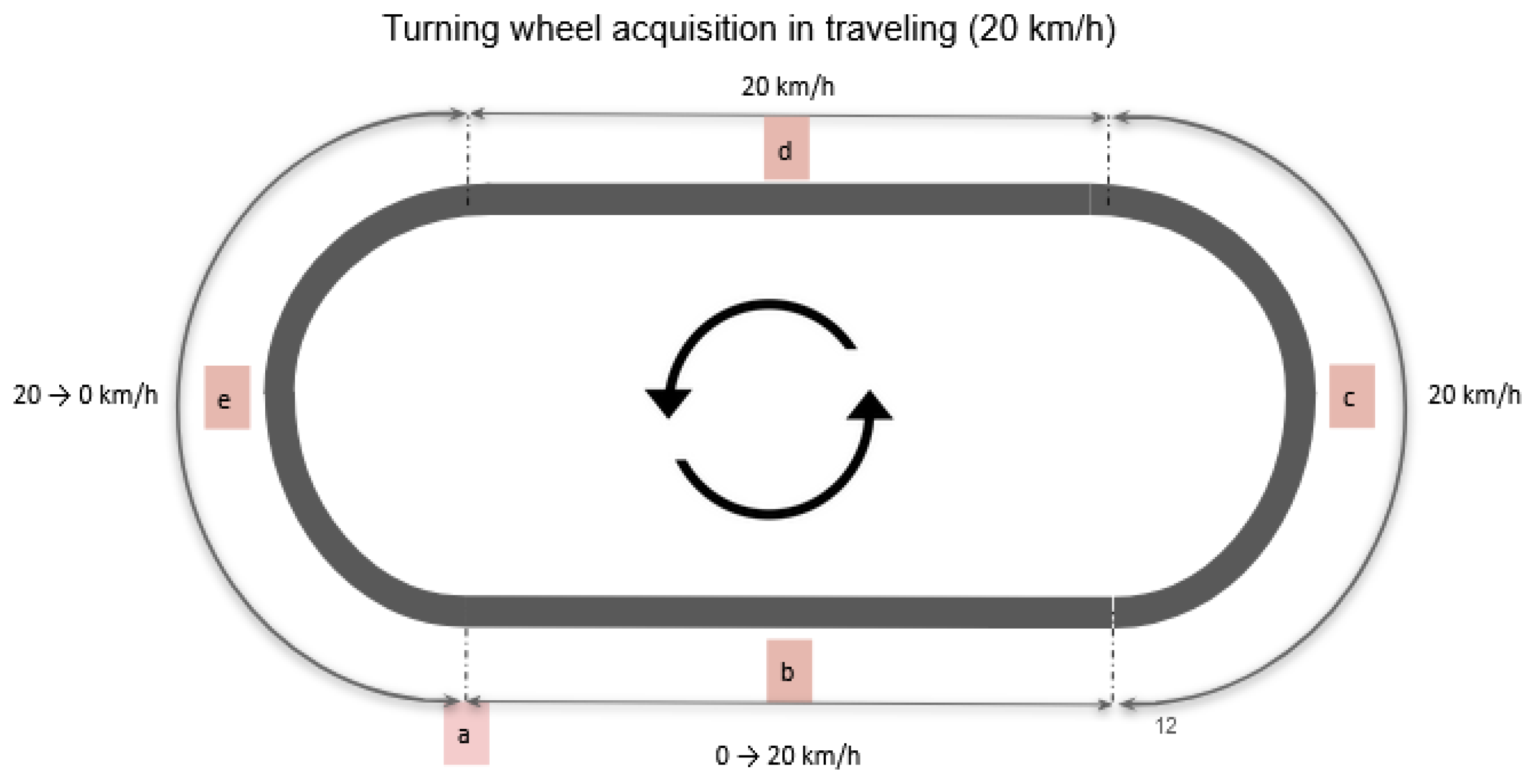
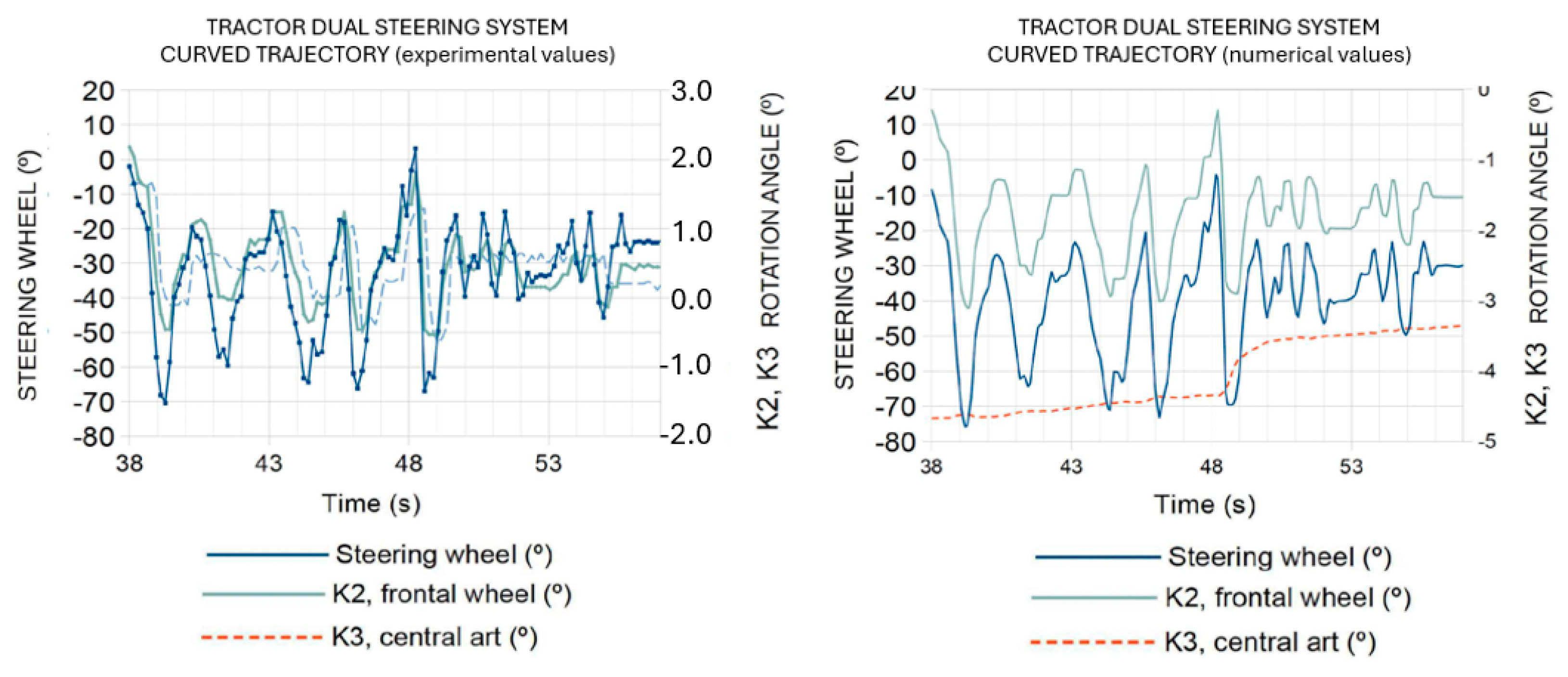
3. Numerical Results and Validation Procedure
4. Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Horton, D.N.L.; Crolla, D.A. Theoretical Analysis of the Steering Behaviour of Articulated Frame Steer Vehicles. Veh. Syst. Dyn. 1986, 15, 211–234. [Google Scholar] [CrossRef]
- Merrit, H.E. Hydraulic Control Systems; Wiley: New York, NY, USA, 1967; 358p. [Google Scholar]
- Lashgarian Azad, N. Dynamic Modelling and Stability Controller Development for Articulated Steer Vehicles [Internet]. University of Waterloo. 2007. Available online: http://hdl.handle.net/10012/2633 (accessed on 26 November 2024).
- Beater, P.; Otter, M. Multi domain simulation: Mechanics and hydraulics of an excavator. In Proceedings of the Conference: 3rd International Modelica Conference, Linkoping, Sweden, 3–4 November 2003; The Modelica Association: Linkoping, Sweden, 2003. [Google Scholar]
- Patil, A.; Radle, M. Hydraulic and multibody combined simulations for electric forklift design using modelica. Int. J. Eng. Sci. Technol. 2022, 10, 27–35. [Google Scholar]
- Altare, G. Analisi e Modellazione del Circuito Idraulico di un Miniescavatore. Master’s Thesis, Politecnico di Torino, Torino, Italy, 2009. [Google Scholar]
- Altare, G.; Lovuolo, F.; Nervegna, N.; Rundo, M. Coupled Simulation of a Telehandler Forks Handling Hydraulics. Int. J. Fluid Power 2012, 13, 15–28. [Google Scholar] [CrossRef]
- Casoli, P.; Alvin, A. Modelling of an Excavator Pump Nonlinear Model and Structural Linkage/Mechanical Model. In Proceedings of the 12th Scandinavian International Conference on Fluid Power, Tampere, Finland, 18–20 May 2011; pp. 25–40. [Google Scholar]
- Prabhu, S.M. Model-Based Design for Off-Highway Machine Systems Development; SAE: Warrendale, PA, USA, 2007. [Google Scholar]
- Jhala, H.S. A Multibody Simulation Approach to Identify Critical Instability Scenarios of a Forklift Truck. Master Automotive Technology. Master’s Thesis, Eindhoven University Technology, Eindhoven, The Netherlands, 2023. [Google Scholar]
- Hong, T.D.; Pham, M.Q.; Tram, S.C.; Tram, L.Q.; Nguyen, T.T. A comparative study on kinetics and dynamics of two dump truck lifting mechanisms using Matlab Simscape. Theor. Appl. Mech. Lett. 2024, 14, 100502. [Google Scholar] [CrossRef]
- Roccatello, A.; Manc, S.; Nervegna, N. Modelling a Variable Displacement Axial Piston Pump in a Multibody Simulation Environment. J. Dyn. Sys. Meas. Control 2007, 29, 456–469. [Google Scholar] [CrossRef]
- Sapietova, A.; Saga, M.; Novak, P. Multi software platform for solving of multibody systems synthesis. Commun. Sci. Lett. Univ. Zilina 2012, 14, 43–48. [Google Scholar] [CrossRef]
- Prescot, W. Using multibody dynamics solvers in a Multiphysics environment. Multibody Dynamics. In Proceedings of the ECCOMAS Thematic Conference, Warsaw, Poland, 29 June–2 July 2009. [Google Scholar]
- Xu, T.; Shen, Y.; Huang, Y.; Khajepour, A. Study of Hydraulic Steering Process for Articulated Heavy Vehicles Based on the Principle of the Least Resistance. IEEE/ASME Trans. Mechatronics 2019, 24, 1662–1673. [Google Scholar] [CrossRef]
- de las Heras, S.; Codina, E. Modelización de Sistemas Fluidos Mediante Bondgraph; S. de las Heras: Barcelona, Spain, 1997. [Google Scholar]
- Filippini, G.; Nigro, N.; Junco, S. Estudio del comportamiento dinamico de vehiculos terrestres utilizando la tecnica de bond graphs. Mec. Comput. 2005, XXIV, 1559–1582. [Google Scholar]
- Filippini, G.; Nigro, N.; Junco, S. Vehicle Dynamics Simulation Using Bond Graphs. December 2004. [Google Scholar]
- Silva, L.; Delarmelina, D.; Junco, S.J.; M’Sirdi, N.K.; Noura, H. Bond Graph Based Fault Diagnosis of 4 W-Vehicles Suspension Systems I: Passive Suspensions. Engineering. 2007. Available online: https://www.google.it/url?sa=t&source=web&rct=j&opi=89978449&url=https://bicyt.conicet.gov.ar/fichas/produccion/1038957&ved=2ahUKEwif3Iu53viKAxVF8bsIHY9rCZMQFnoECBkQAQ&usg=AOvVaw0xTVpxpM8ouuZrtodG6tjX (accessed on 26 November 2024).
- Borutzky, W. (Ed.) Bond Graphs for Modelling, Control and Fault Diagnosis of Engineering Systems; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Thoma, J.U. Simulation by Bondgraphs: Introduction to a Graphical Method; Springer: Berlin/Heidelberg, Germany, 1990; p. 1. [Google Scholar]
- Karnopp, D.; Margolis, D.L.; Rosenberg, R.C. System Dynamics: Modeling and Simulation of Mechatronic Systems, 5th ed.; Wiley: Hoboken, NJ, USA, 2012; p. 411. [Google Scholar]
- Bos, A.M. Modelling Multibody Systems in Terms of Multibond Graphs: With Applications to a Motorcycle; Universiteit Twente: Enschede, The Netherlands, 1986. [Google Scholar]
- 20-SIM Software Package for Mechatronic Systems [Internet]. Controllab Products. Available online: https://www.20sim.com/download/ (accessed on 26 November 2024).
- Pacejka, H.B.; Besselink, I. Tire and Vehicle Dynamics, 3rd ed.; Butterworth-Heinemann Elsevier: Waltham, MA, USA, 2012. [Google Scholar]
- Hao, L. Analysis of Off-Road Tire-Soil Interaction through Analytical and Finite Element Methods. Engineering, Environmental Science, Agricultural and Food Sciences. August 2013, p. 33. Available online: https://www.google.it/url?sa=t&source=web&rct=j&opi=89978449&url=https://kluedo.ub.rptu.de/files/3644/_Analysis%2Bof%2BOff-Road%2BTire-Soil%2BInteraction%2Bthrough%2BAnalytical%2Band%2BFinite%2BElement%2BMethods.pdf&ved=2ahUKEwj-1b2p4fiKAxWw3AIHHbmOIYgQFnoECB8QAQ&usg=AOvVaw2qganoqOMonCq3Uuojk2p_ (accessed on 26 November 2024).
- Lines, J.A.; Murphy, K. The stiffness of agricultural tractor tyres. J. Terramech. 1991, 28, 49–64. [Google Scholar] [CrossRef]
- Polotski, V. New reference point for guiding an articulated vehicle. In Proceedings of the 2000 IEEE International Conference on Control Applications Conference Proceedings (Cat No00CH37162), Anchorage, AK, USA, 27 September 2000; pp. 455–460. [Google Scholar]
- Dudziński, P.; Skurjat, A. System for improving directional stability for articulated vehicles. AIP Conf. Proc. 2019, 2078, 020084. [Google Scholar]
- Łopatka, M.J.; Rubiec, A. Concept and Preliminary Simulations of a Driver-Aid System for Transport Tasks of Articulated Vehicles with a Hydrostatic Steering System. Appl. Sci. 2020, 10, 5747. [Google Scholar] [CrossRef]
- Alhimdani, F.F. Dynamic Analysis of Steering Articulated Tracked Vehicles. J. Eng. Sustain. Dev. 2006, 10, 32–44. [Google Scholar]
- Delrobaei, M.; McIsaac, K.A. Design and Steering Control of a Center-Articulated Mobile Robot Module. J. Robot. 2011, 2011, 621879. [Google Scholar] [CrossRef]
- Dudziński, P.; Skurjat, A. Directional dynamics problems of an articulated frame steer wheeled vehicles. J. KONES Powertrain Transp. 2015, 19, 89–98. [Google Scholar] [CrossRef]
- Qiao, Y.; Chen, X.; Yin, D. Coordinated Control for the Trajectory Tracking of Four-Wheel Independent Drive–Four-Wheel Independent Steering Electric Vehicles Based on the Extension Dynamic Stability Domain. Actuators 2024, 13, 77. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Description | Akermann Steering System | Articulated Steering System | Dual Steering System |
|---|---|---|---|---|
| Ro [m] | Outer diameter | 3.7 | 3.8 | 3.8 |
| Ri [m] | Inner diameter | 2.2 | 3.48 | 2.2 (R1) |
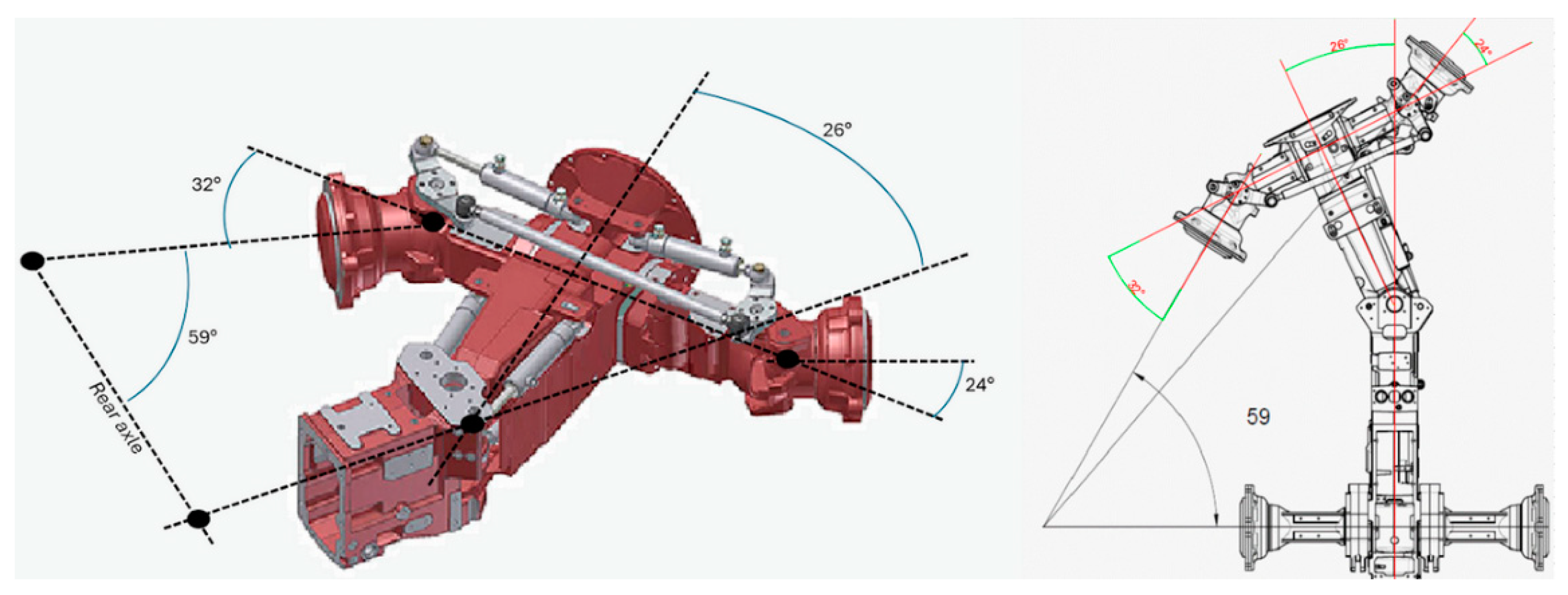
| α | Angle on outer diameter | 24° | 26° | 26° |
| L [mm] | Wheelbase | 1495 | 1495 | 1496 (R1) |
| T [mm] | Median roadway | 1150 | 1150 | 1150 |
| F [mm] | Central pin—front axle | - | 650 | 650 |
| R [mm] | Central pin—rear axle | - | 845 | 845 |
| ϑ | Steering angle | - | - | 24 |
| % Ro | Percentage on Ro (ref. Ackermann) | - | +4.2 | −40.3 |
| Category | Software Name | Characteristics |
|---|---|---|
| A | ADAMS, SIMPACK, RECURDyn, ALTAIR MS | General purpose software, often part of larger platforms, supporting complex multiphysics simulations |
| B | MODELICA, SimCenter AMESim, MapleSim, 20-Sim, MAthWorks (MATLAB, Simulink) | Programs focused on the dynamics of physical or multidomain systems with extended functionality (e.g., bond graph methods) |
| Sensor Type | Sensor Nomenclature | Accuracy/Main Characteristic |
|---|---|---|
| Rotational transducer, i_s | Wachendorff WDGA 58E-12-1213-COA-B00-CC5-AHW Magnetic Absolute Encoder Binary/CANopen | 12-bit ST/13-bit MT 10 … 32 V 6000 min−1 |
| Angular sensor | ELEN Angular sensor ±60° 10–30 V ball bearings | Linearity < ±1% |
| Logging instrument | HYDAC HMG 4000 | J1939 CAN Protocol |
| Symbol | Description/Characteristics |
|---|---|
  | Diesel engine 75 kW, 2100 rpm Pump Cv = 15 cm3/rev |
 | Relief valve 140 bar |
 | Control flow valve (3 ways) 13 L/min regulated |
 | Load sensing pressure compensator Dp = 5 bar pressure setting |
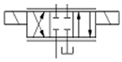 | 4/3 proportional directional control valve (30 L/min nominal) 12 V electric actuator |
 | Shuttle valve cartridge |
 | Double-effect cylinder 48 × 22 × 130 front—42 × 22 × 87 central |
 | Hydrostatic steering unit 100 cm3/rev (Gerotor + rotary valve) |
 | Tank |
 | Hydraulic load 18–20 bar |
| Hydraulic Parameters | Value | Units |
|---|---|---|
| Oil density | 875 | kg/m3 |
| Oil bulk modulus | 17.500 | bar |
| Oil kinematic viscosity | 46 | mm2/s |
| Pump maximum displacement | 6.50 | cm3/rev |
| Pump volumetric efficiency | 0.93 | |
| Pump hydraulic–mechanical efficiency | 0.96 | |
| Engine speed | 2.300 | rpm |
| Relief valve cracking pressure | 18 | MPa |
| Proportional directional control valve 4/3 | SP10-47D | serie |
| Flow control valve pressure compensated | BFCV12 | serie |
| Pressure compensating element | EC16-32 | serie |
| Viscous friction coefficient | 50 | N/m/s |
| Cylinder leakage coefficient | 0.001 | L/min/MPa |
| Piston diameter of front steering hydraulic cylinder | 48 | mm |
| Rod diameter of front steering hydraulic cylinder | 22 | mm |
| Travel of front hydraulic cylinder | 131 | mm |
| Piston diameter of central articulation hydraulic cylinder | 42 | mm |
| Rod diameter of central articulation hydraulic cylinder | 22 | mm |
| Travel of central articulation hydraulic cylinder | 87 | mm |
| Steering unit (HSU) displacement | 80 | cm3/rev |
| HSU spring rate (estimated) | 6.40 | N∗cm/rad |
| Steering wheel angles | ±700 | degree |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Massarotti, G.P.; Filippini, G.; Alviach, G.R.; Gamez-Montero, P.J.; Macia, E.C. A New Dual Steering System in a Compact Tractor. Actuators 2025, 14, 35. https://doi.org/10.3390/act14010035
Massarotti GP, Filippini G, Alviach GR, Gamez-Montero PJ, Macia EC. A New Dual Steering System in a Compact Tractor. Actuators. 2025; 14(1):35. https://doi.org/10.3390/act14010035
Chicago/Turabian StyleMassarotti, Giorgio Paolo, German Filippini, Gustavo Raush Alviach, Pedro Javier Gamez-Montero, and Esteban Codina Macia. 2025. "A New Dual Steering System in a Compact Tractor" Actuators 14, no. 1: 35. https://doi.org/10.3390/act14010035
APA StyleMassarotti, G. P., Filippini, G., Alviach, G. R., Gamez-Montero, P. J., & Macia, E. C. (2025). A New Dual Steering System in a Compact Tractor. Actuators, 14(1), 35. https://doi.org/10.3390/act14010035