
Adaptive Neural Network Control of Four-Switch Buck–Boost Converters

Abstract
1. Introduction
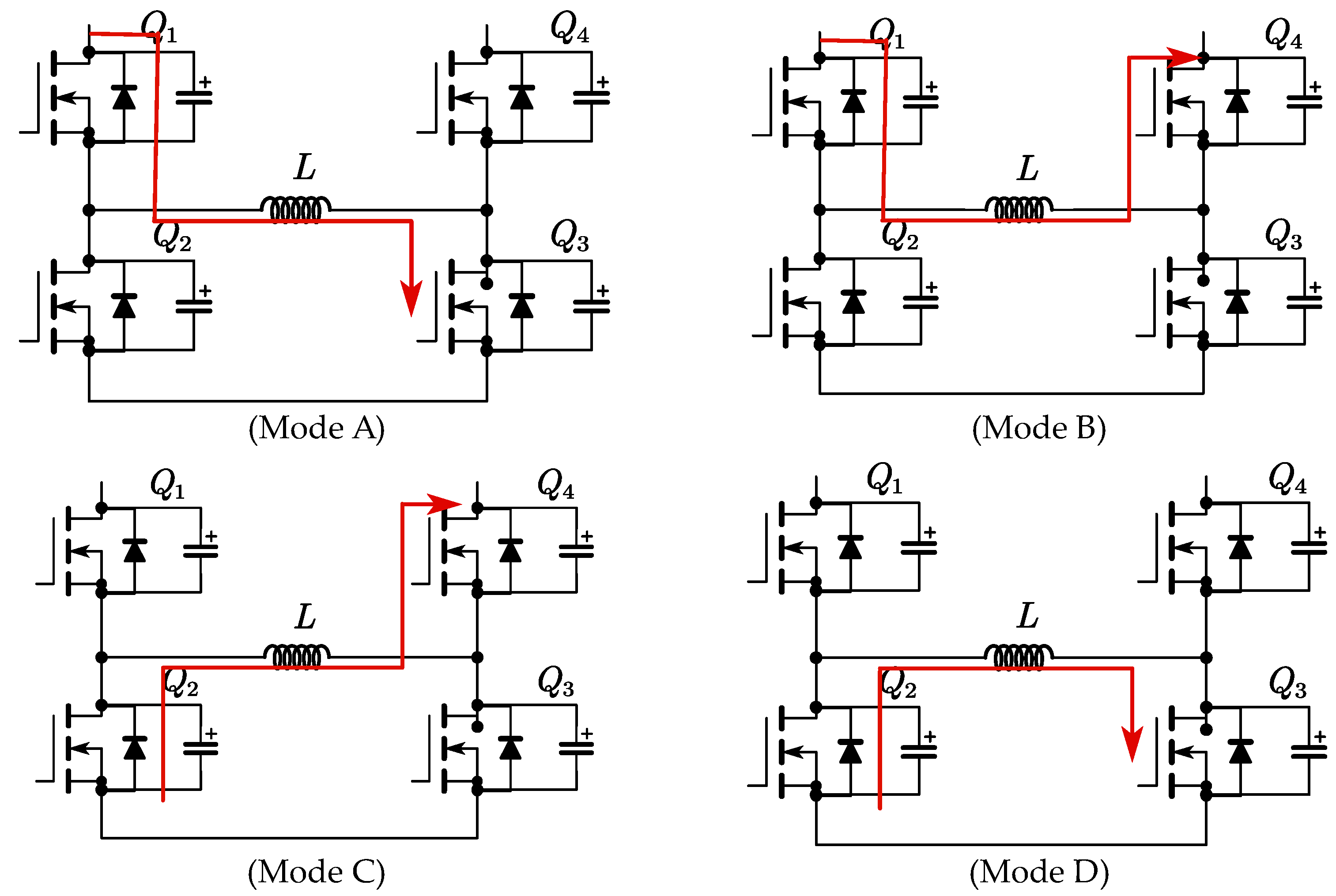
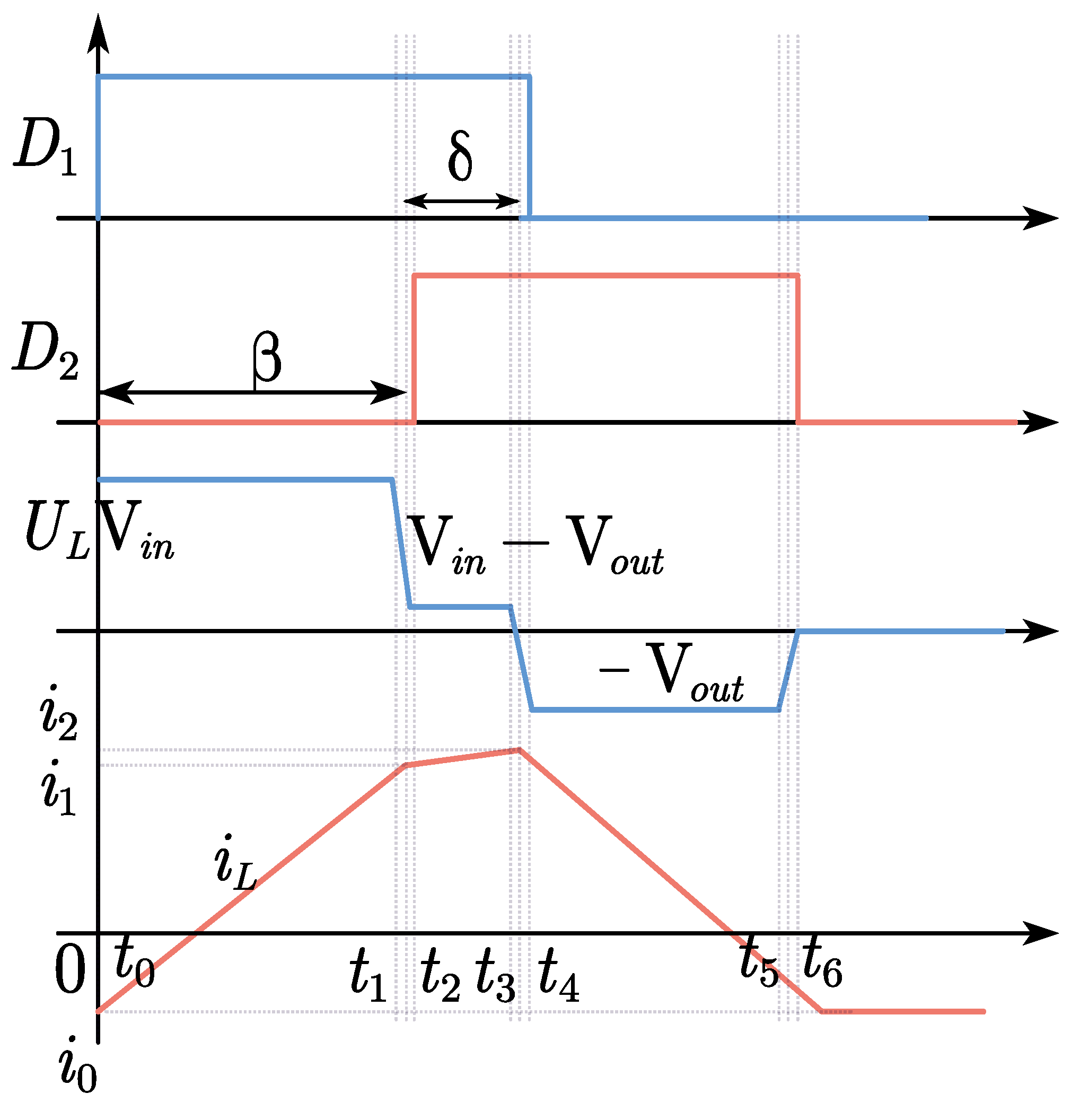
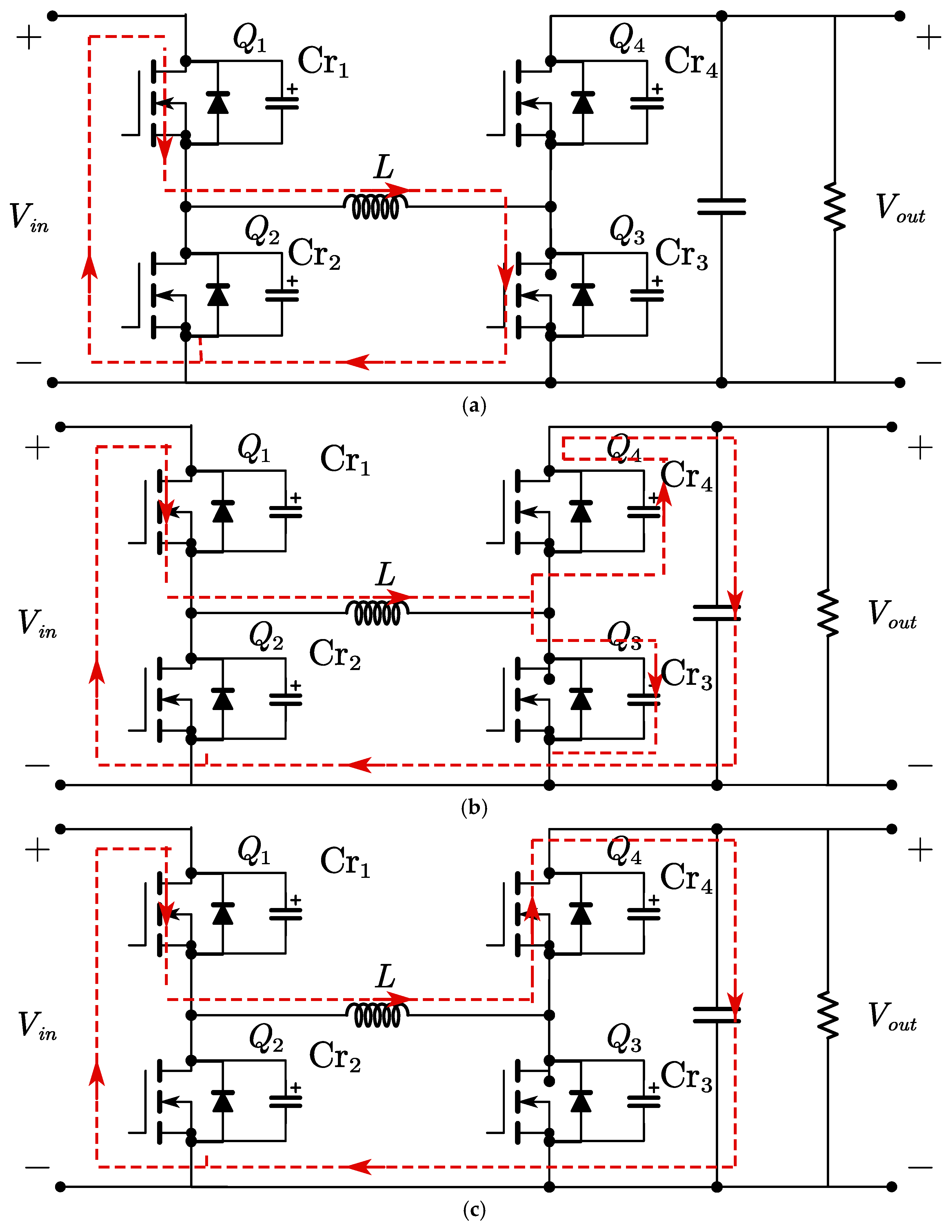
2. FSBB Converter Operating Mode Review
2.1. Review of FSBB Converter Operation Modes
2.2. ZVS Conditions
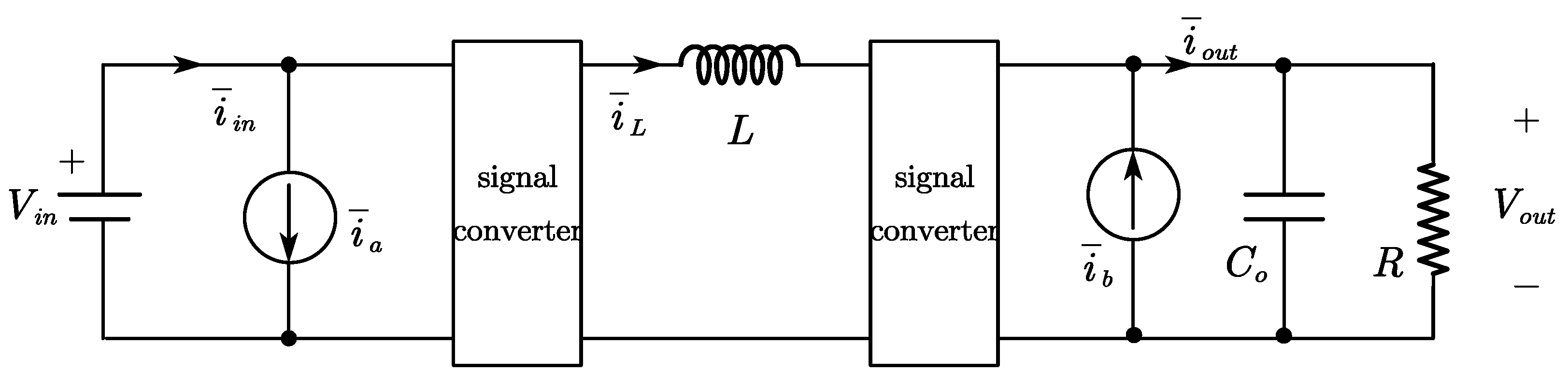
3. Mathematical Modeling of FSBB Converter
3.1. Modeling Analysis Based on Energy Transformation
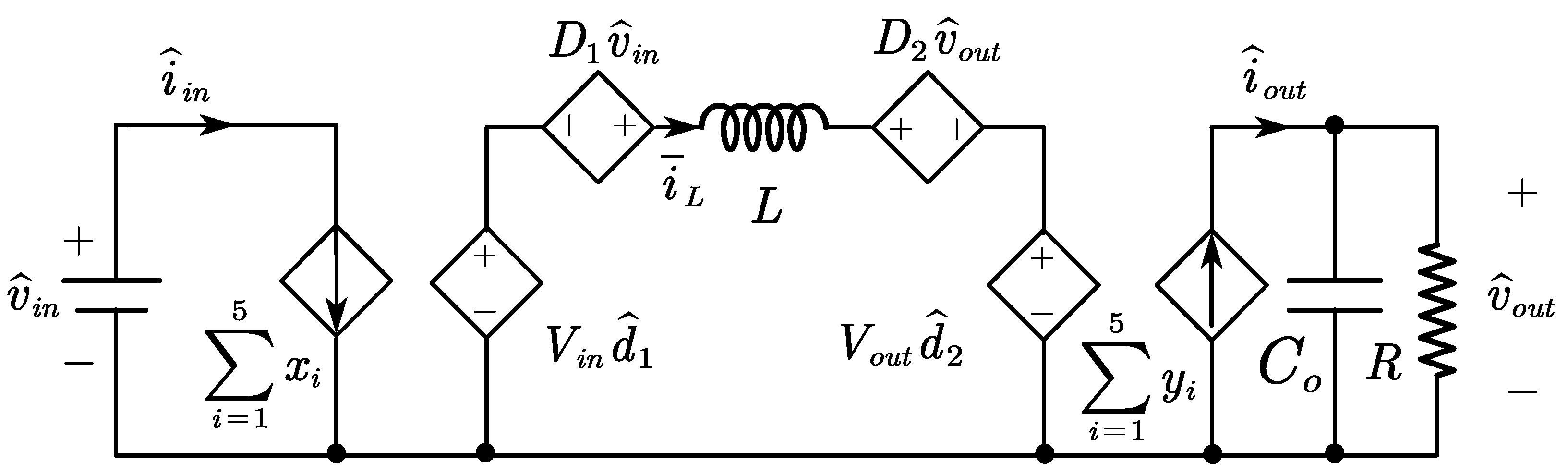
3.2. Deriving the Transfer Function
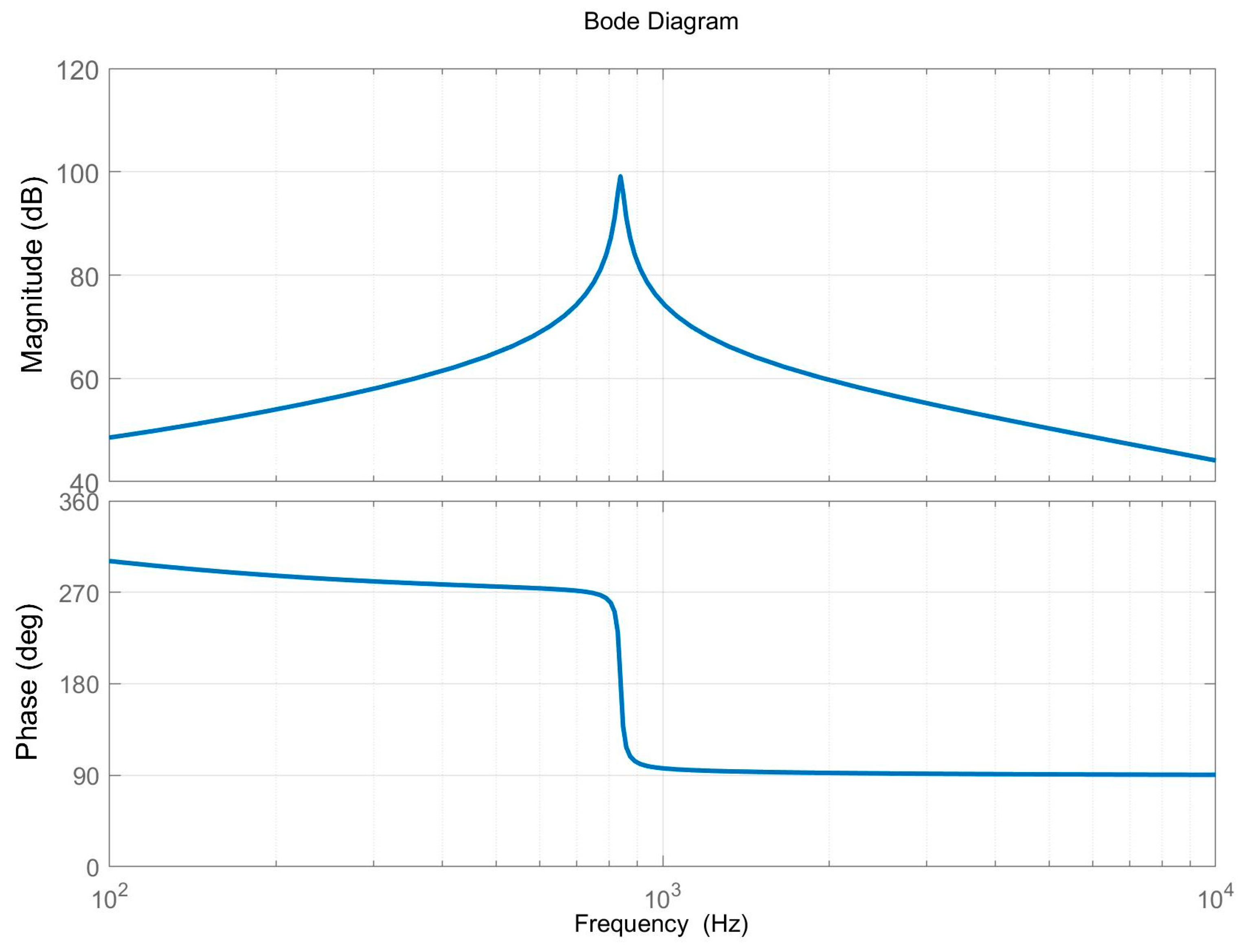
3.3. Signal Model Validation
4. Adaptive Neural Network Controller
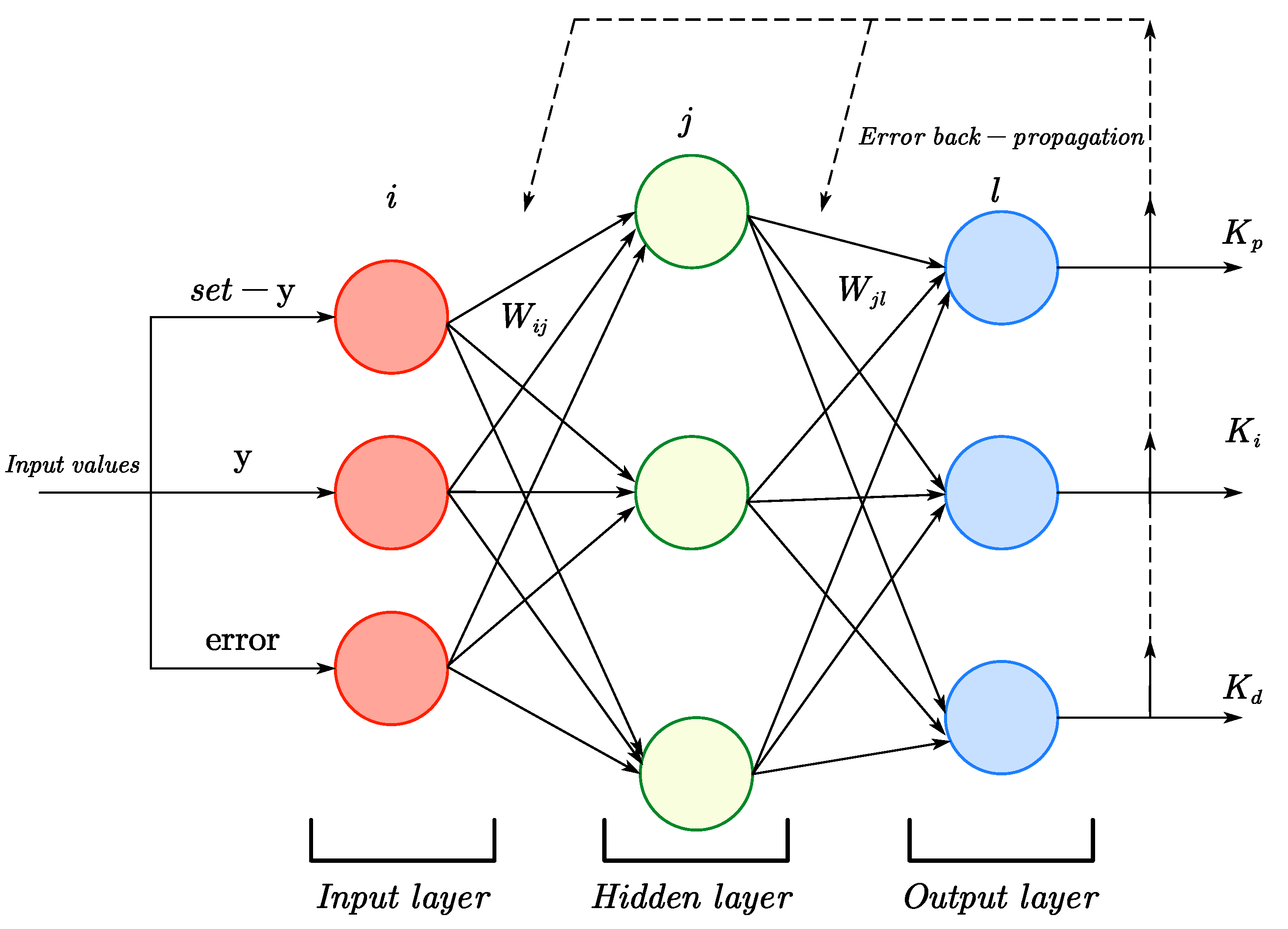
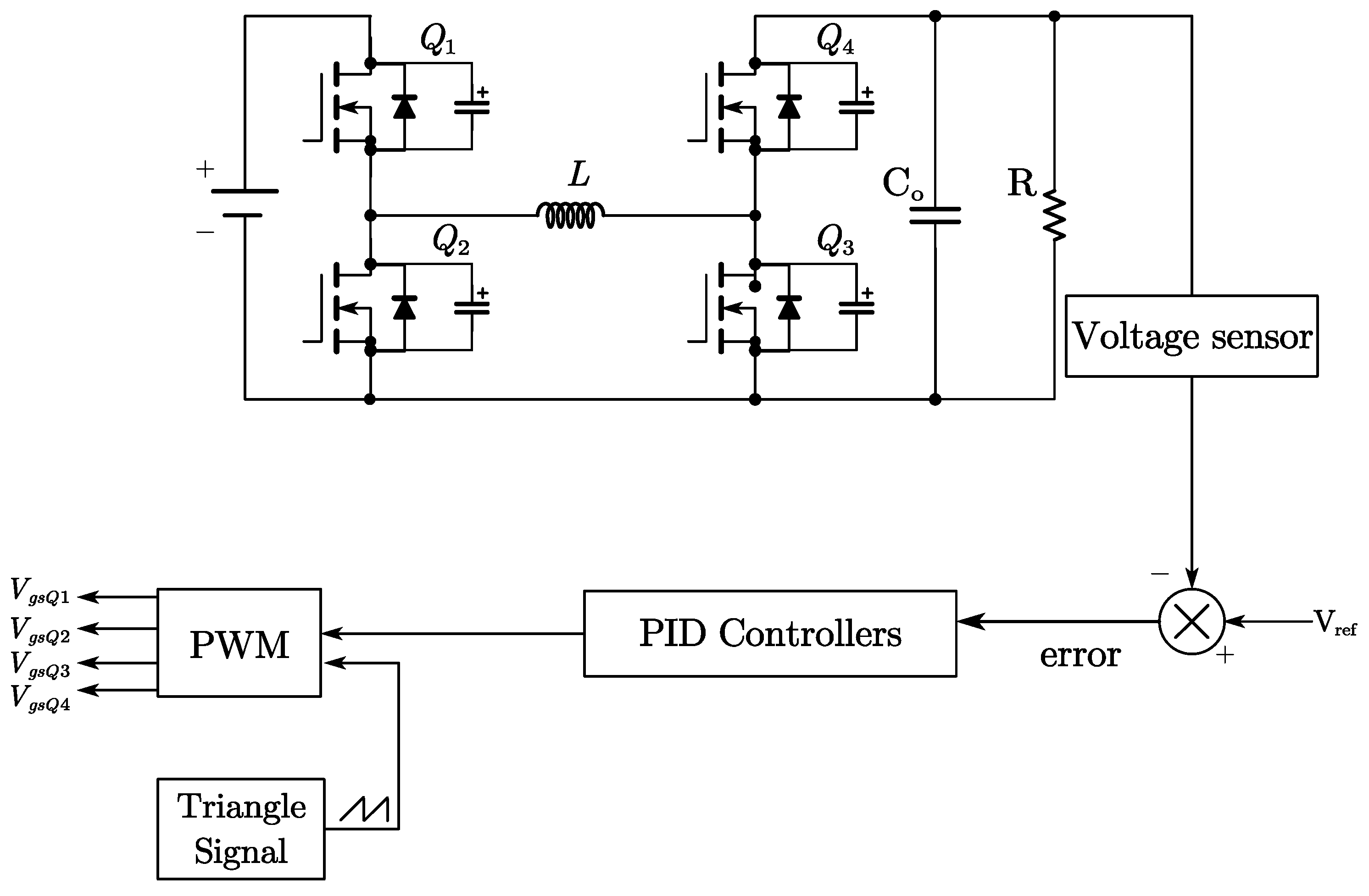
4.1. Control Structure Design
4.2. BP Neural Network Control Algorithm
4.3. Adaptive Optimization of the Output
- is the expected value.
- is the predicted value.
4.4. Analysis of Control System
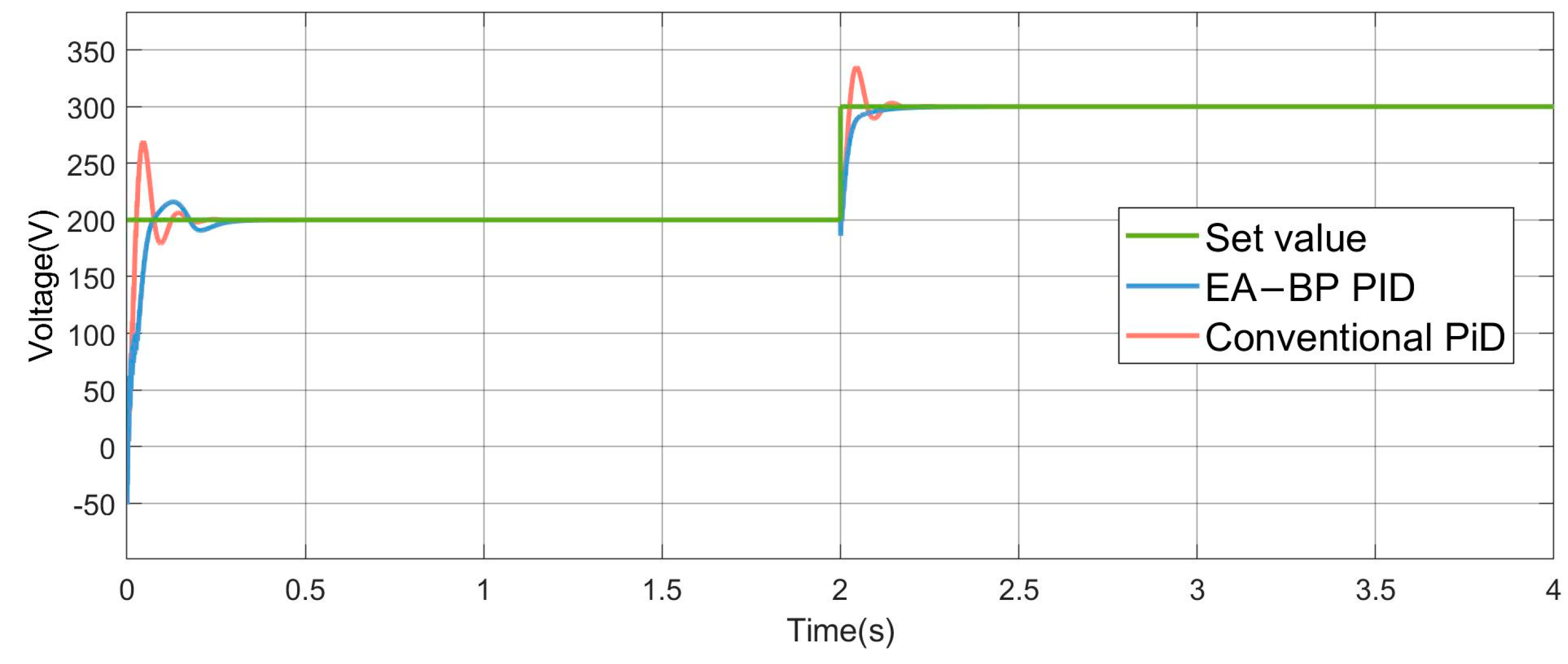
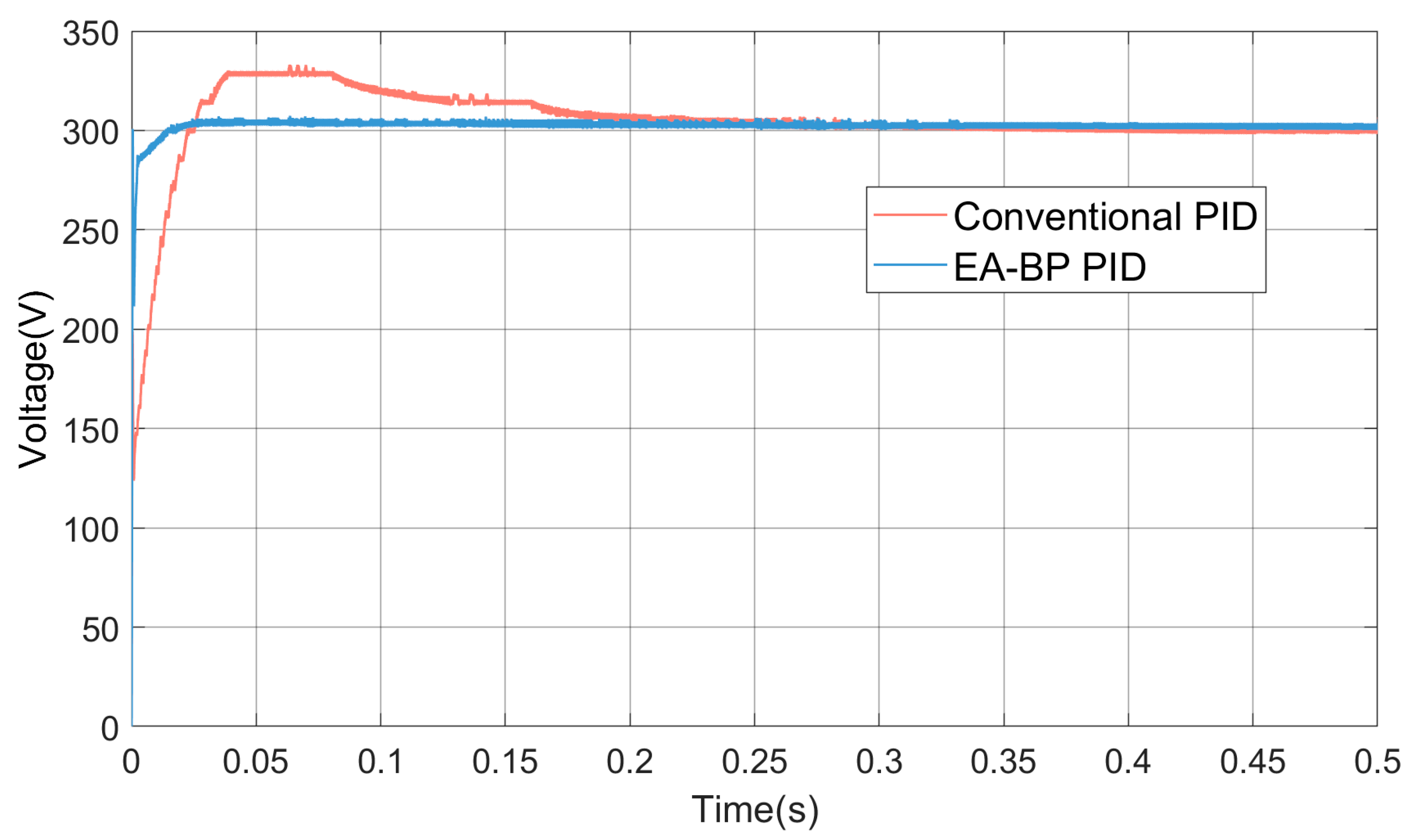
5. Analysis of Simulation Results
6. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.-F.; Xue, L.-K.; Wang, C.-S.; Wang, P.; Li, W. Interleaved High-Conversion-Ratio Bidirectional DC–DC Converter for Distributed Energy-Storage Systems—Circuit Generation, Analysis, and Design. IEEE Trans. Power Electron. 2016, 31, 5547–5561. [Google Scholar] [CrossRef]
- Zhu, J.-Y.; Lehman, B. Control Loop Design for Two-Stage DC-DC Converters with Low Voltage/High Current Output. IEEE Trans. Power Electron. 2005, 20, 44–55. [Google Scholar] [CrossRef]
- Ruan, X.; Li, B. Zero-Voltage and Zero-Current-Switching PWM Hybrid Full-Bridge Three-Level Converter. IEEE Trans. Ind. Electron. 2005, 52, 213–220. [Google Scholar] [CrossRef]
- Ruan, X.; Chen, Z.; Chen, W. Zero-Voltage-Switching PWM Hybrid Full-Bridge Three-Level Converter. IEEE Trans. Power Electron. 2005, 20, 395–404. [Google Scholar] [CrossRef]
- Pesce, C.; Blasco, R.; Riedemann, J.; Andrade, I.; Pena, R. A DC-DC Converter Based On Modified Flyback Converter Topology. IEEE Latin Am. Trans. 2016, 14, 3949–3956. [Google Scholar] [CrossRef]
- Kwon, H.-J.; Kim, K.-Y.; Kim, J.-H. A Novel Control Scheme of Four Switch Buck-Boost Converter for Super Capacitor Pre-Charger. IEEE Access 2024, 12, 47210–47218. [Google Scholar] [CrossRef]
- Chen, Z.; Tang, X.; Zheng, Z.; Wu, Y.; Luo, Z. An Adaptive Dual-controller On-line Efficiency Optimization Method of Four-switch Buck-boost Converter for Wide Range Application. Int. J. Circuit Theory Appl. 2024, 52, 2686–2703. [Google Scholar] [CrossRef]
- González-Castaño, C.; Restrepo, C.; Flores-Bahamonde, F.; Rodriguez, J. A Composite DC–DC Converter Based on the Versatile Buck–Boost Topology for Electric Vehicle Applications. Sensors 2022, 22, 5409. [Google Scholar] [CrossRef] [PubMed]
- Bai, Y.; Cao, Y.; Mitrovic, V.; Fan, B.; Burgos, R.; Boroyevich, D. A Simplified Quadrangle Current Modulation for Four-Switched Buck-Boost Converter (FSBB) with a Novel Small Signal Model. In Proceedings of the 2023 IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 19 March 2023; IEEE: New York, NY, USA, 2023; pp. 736–743. [Google Scholar]
- Gallo, E.; Biadene, D.; Cvejić, F.; Spiazzi, G.; Caldognetto, T. An Energy-Based Model of Four-Switch Buck–Boost Converters. IEEE Trans. Power Electron. 2024, 39, 4139–4148. [Google Scholar] [CrossRef]
- Xu, X.; Li, D. Torque Control of DC Torque Motor Based on Expert PID. J. Phys. Conf. Ser. 2020, 1626, 012073. [Google Scholar] [CrossRef]
- Bello, A.; Olfe, K.S.; Rodríguez, J.; Ezquerro, J.M.; Lapuerta, V. Experimental Verification and Comparison of Fuzzy and PID Controllers for Attitude Control of Nanosatellites. Adv. Space Res. 2023, 71, 3613–3630. [Google Scholar] [CrossRef]
- Zhang, M.-L.; Zhang, Y.-J.; He, X.-L.; Gao, Z.-J. Adaptive PID Control and Its Application Based on a Double-Layer BP Neural Network. Processes 2021, 9, 1475. [Google Scholar] [CrossRef]
- Zhang, H.; Yuan, X. An Improved Ppaper Swarm Algorithm to Optimize PID Neural Network for Pressure Control Strategy of Managed Pressure Drilling. Neural Comput. Appl. 2020, 32, 1581–1592. [Google Scholar] [CrossRef]
- Ma, C.; Tian, S.; Xiao, X.; Jiang, Y. Fuzzy Neural Network PID–Based Constant Deceleration Compensation Device for the Brakes of Mining Hoists. Adv. Mech. Eng. 2020, 12, 168781402093756. [Google Scholar] [CrossRef]
- Cheng, Y.-M.; Liu, C.; Wu, J.; Liu, H.-M.; Lee, I.-K.; Niu, J.; Cho, J.-P.; Koo, K.-W.; Lee, M.-W.; Woo, D.-G. A Back Propagation Neural Network with Double Learning Rate for PID Controller in Phase-Shifted Full-Bridge Soft-Switching Power Supply. J. Electr. Eng. Technol. 2020, 15, 2811–2822. [Google Scholar] [CrossRef]
- Shen, Y.; Jiang, Y.; Zhao, H.; Shillaber, L.; Jiang, C.; Long, T. Quadrilateral Current Mode Paralleling of Power MOSFETs for Zero-Voltage Switching. IEEE Trans. Power Electron. 2021, 36, 5997–6014. [Google Scholar] [CrossRef]
- Liu, F.; Xu, J.; Chen, Z.; Huang, R.; Chen, X. A Constant Frequency ZVS Modulation Scheme for Four-Switch Buck–Boost Converter With Wide Input and Output Voltage Ranges and Reduced Inductor Current. IEEE Trans. Ind. Electron. 2023, 70, 4931–4941. [Google Scholar] [CrossRef]
- Zhou, Z.; Li, H.; Wu, X. A Constant Frequency ZVS Control System for the Four-Switch Buck–Boost DC–DC Converter With Reduced Inductor Current. IEEE Trans. Power Electron. 2019, 34, 5996–6003. [Google Scholar] [CrossRef]
- Li, H.; Tong, Y.; Li, C. Modeling and Control of a Linear Piezoelectric Actuator. Actuators 2024, 13, 55. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | |
|---|---|---|
| Filter Capacitors | Co | 300 μF |
| Phase-shift Switching frequency | fs | 20 kHz |
| Phase Shift | β | 0.3 |
| Input Duty Cycle | D1 | 0.6 |
| Output Duty Cycle | D2 | 0.4 |
| Output Voltage | Vout | 300 V |
| Input Voltage | Vin | 350 V |
| Load Resistance | R | 30 Ω |
| Inductors | L | 30 μH |
| R (Ω) | Percentage of Rated Power |
|---|---|
| 150 | 20% |
| 60 | 50% |
| 37.5 | 80% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, L.; Wang, D.; Zhang, Y. Adaptive Neural Network Control of Four-Switch Buck–Boost Converters. Actuators 2024, 13, 375. https://doi.org/10.3390/act13090375
Ren L, Wang D, Zhang Y. Adaptive Neural Network Control of Four-Switch Buck–Boost Converters. Actuators. 2024; 13(9):375. https://doi.org/10.3390/act13090375
Chicago/Turabian StyleRen, Luoyao, Dazhi Wang, and Yupeng Zhang. 2024. "Adaptive Neural Network Control of Four-Switch Buck–Boost Converters" Actuators 13, no. 9: 375. https://doi.org/10.3390/act13090375
APA StyleRen, L., Wang, D., & Zhang, Y. (2024). Adaptive Neural Network Control of Four-Switch Buck–Boost Converters. Actuators, 13(9), 375. https://doi.org/10.3390/act13090375